A Data Model for Using OpenStreetMap to Integrate Indoor and Outdoor Route Planning

Abstract
:1. Introduction
2. The Proposed Data Model
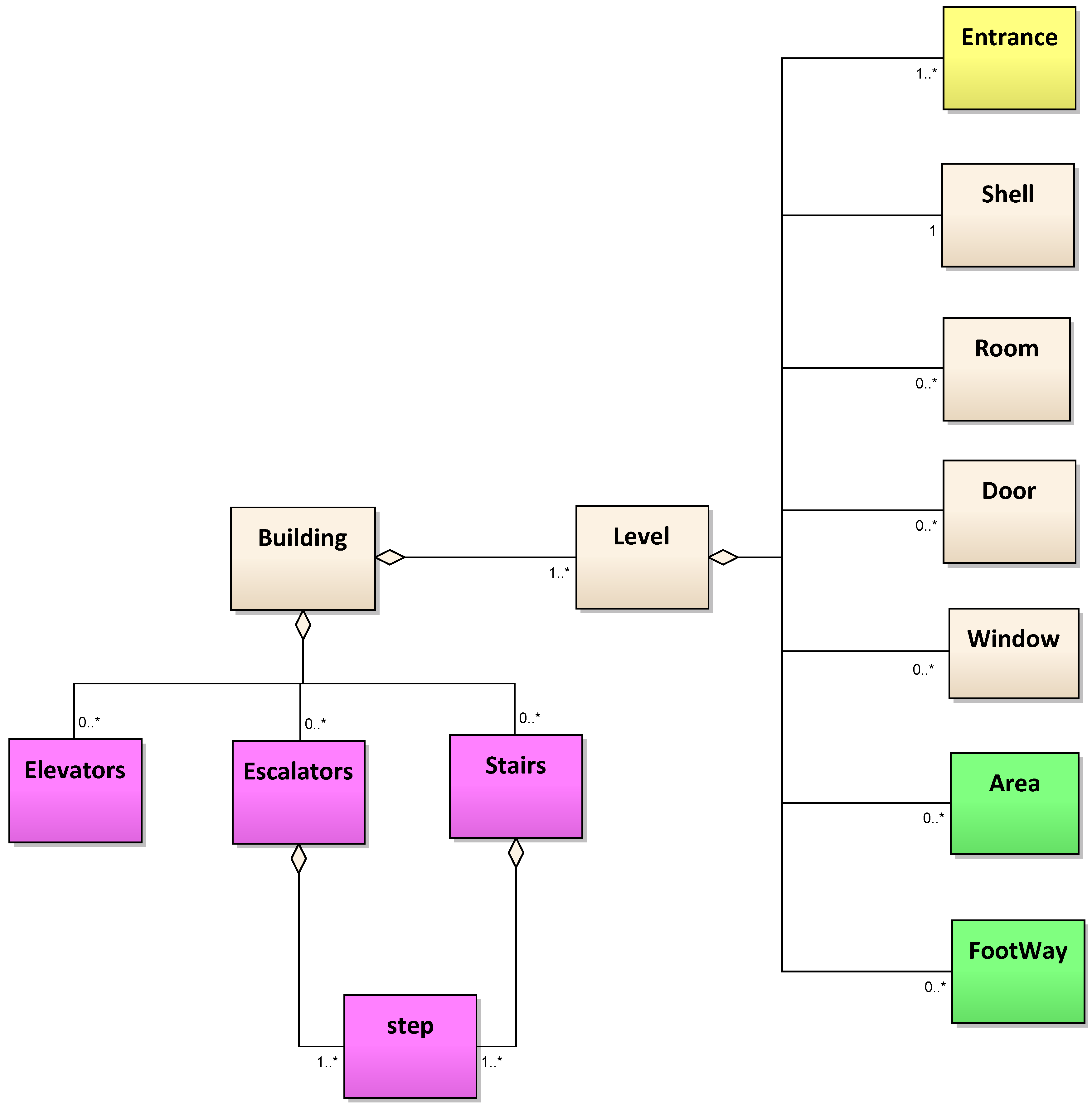
2.1. Modeling of Buildings and Inner Building Parts
2.2. Modeling of Horizontal Connections
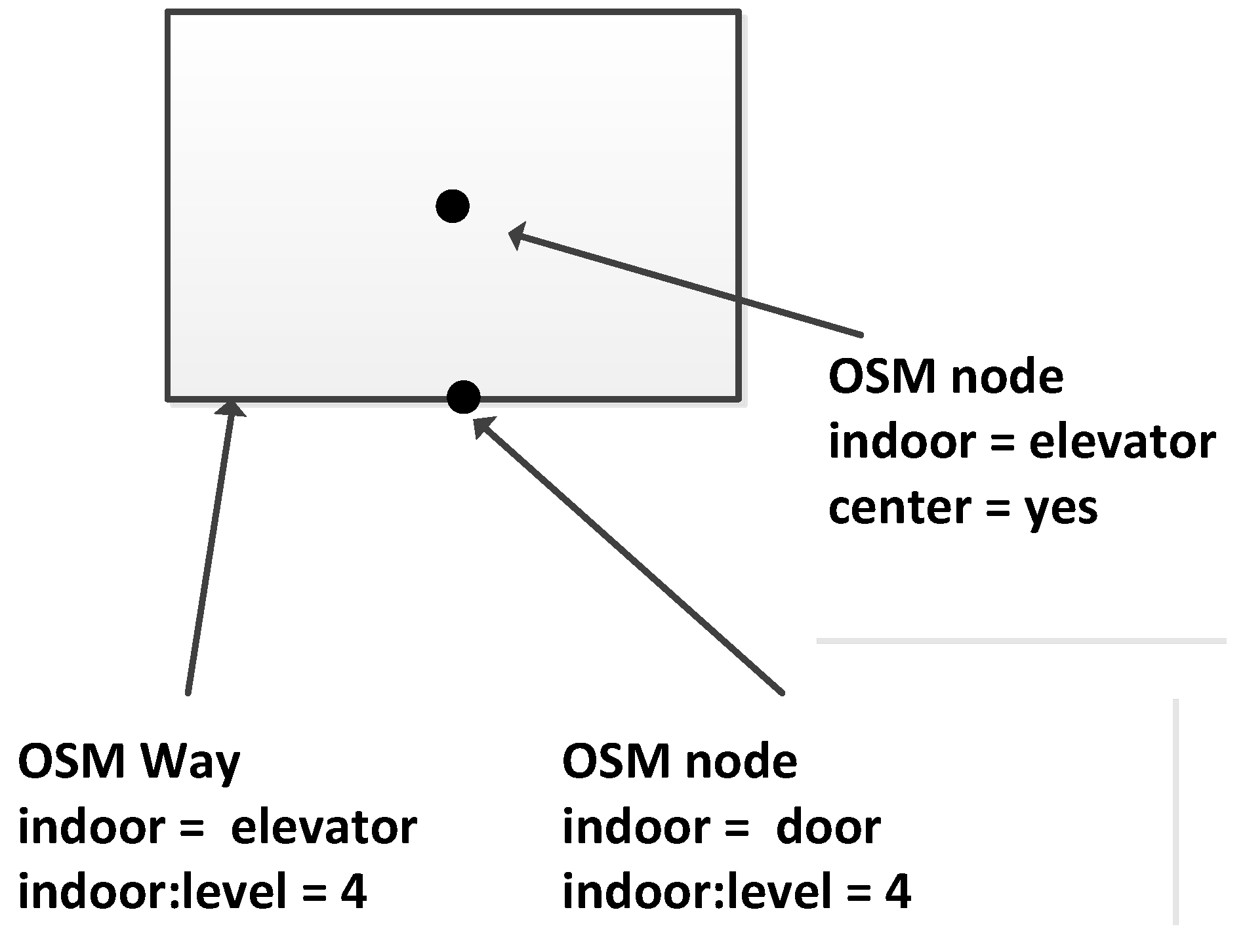
2.3. Modeling of Vertical Connections
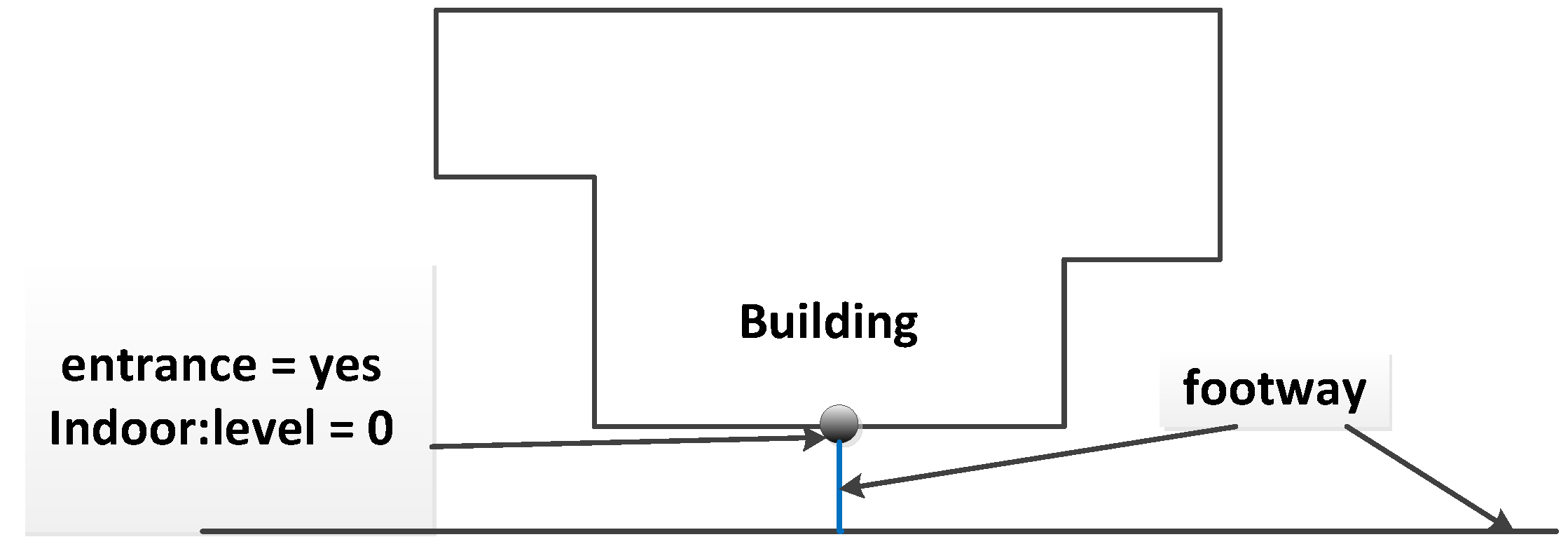
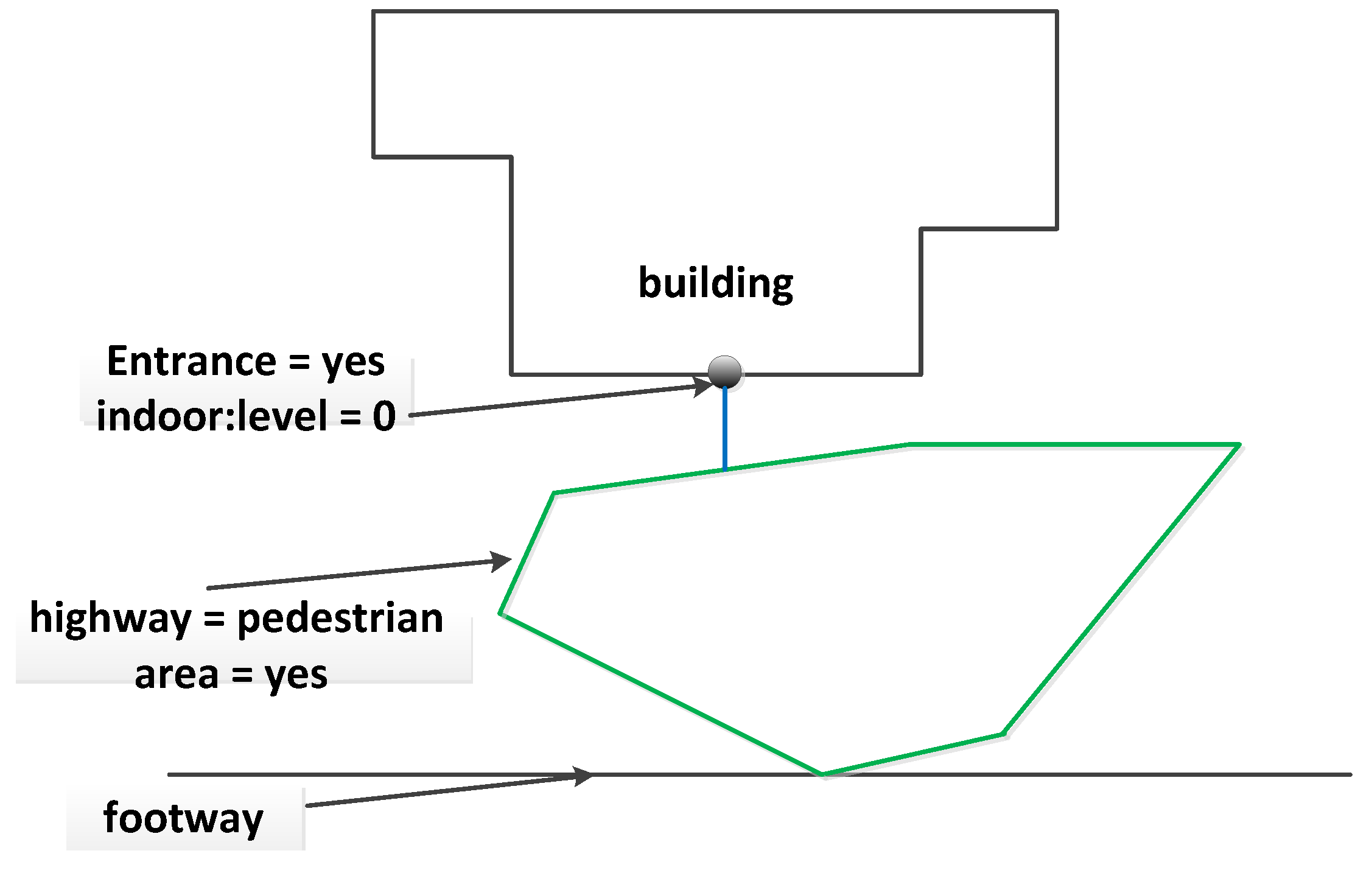
2.4. Modeling of Connections between Indoor and Outdoor Environments
3. Indoor-Outdoor Route Planning
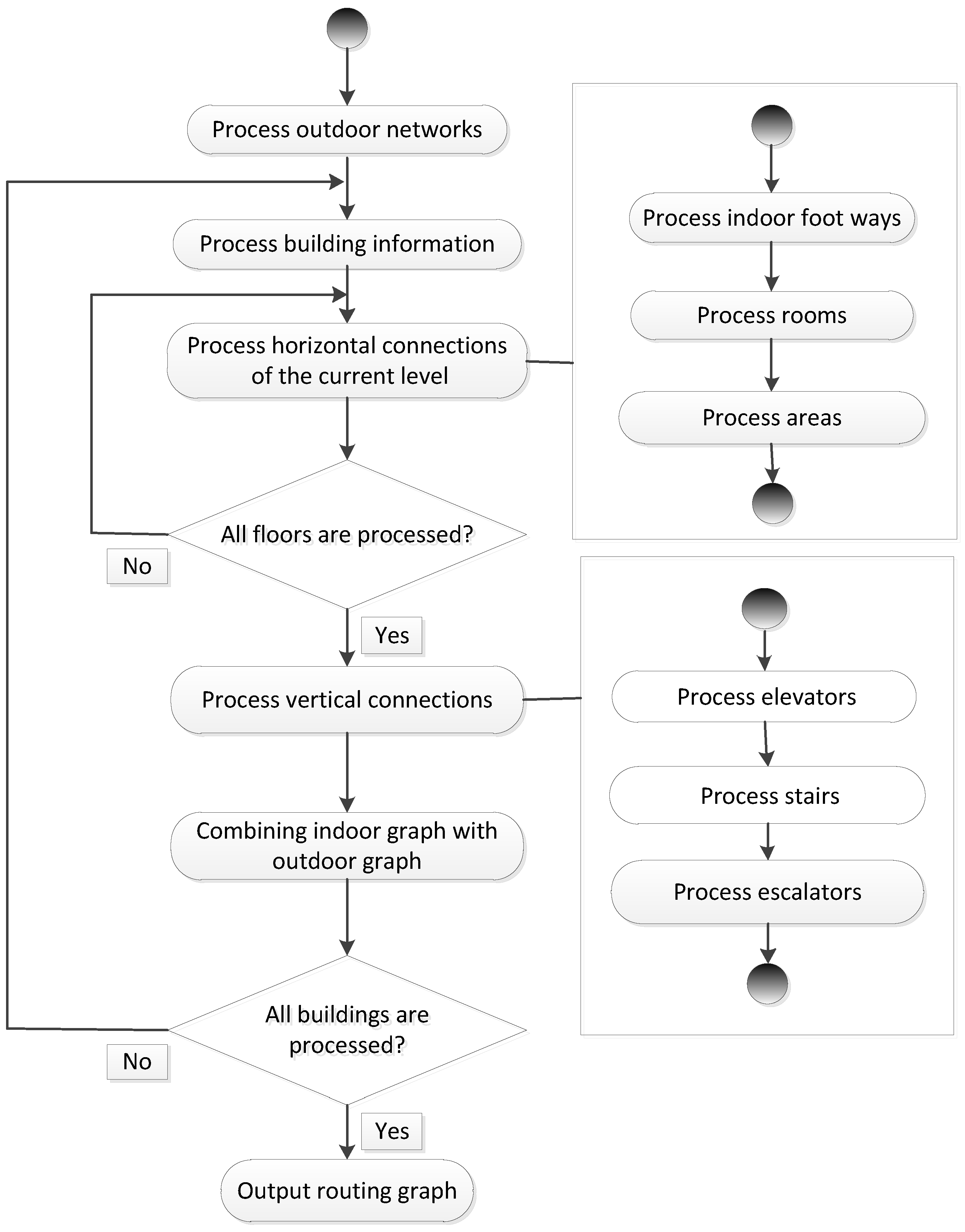
3.1. Workflow for Generating the Routing Graph
- Processing outdoor networks: We first process the OSM ways that can be used by pedestrians in outdoor environments and include them in the routing graph.
- Processing building information: For each building relation, the height information of all floors is collected to derive the elevation of each floor. For the OSM nodes of each floor, we derive their height based on the height of the associated floor and their distance relative to the floor. This would allow the use of 3D information to obtain the actual length of edges in the routing graph.
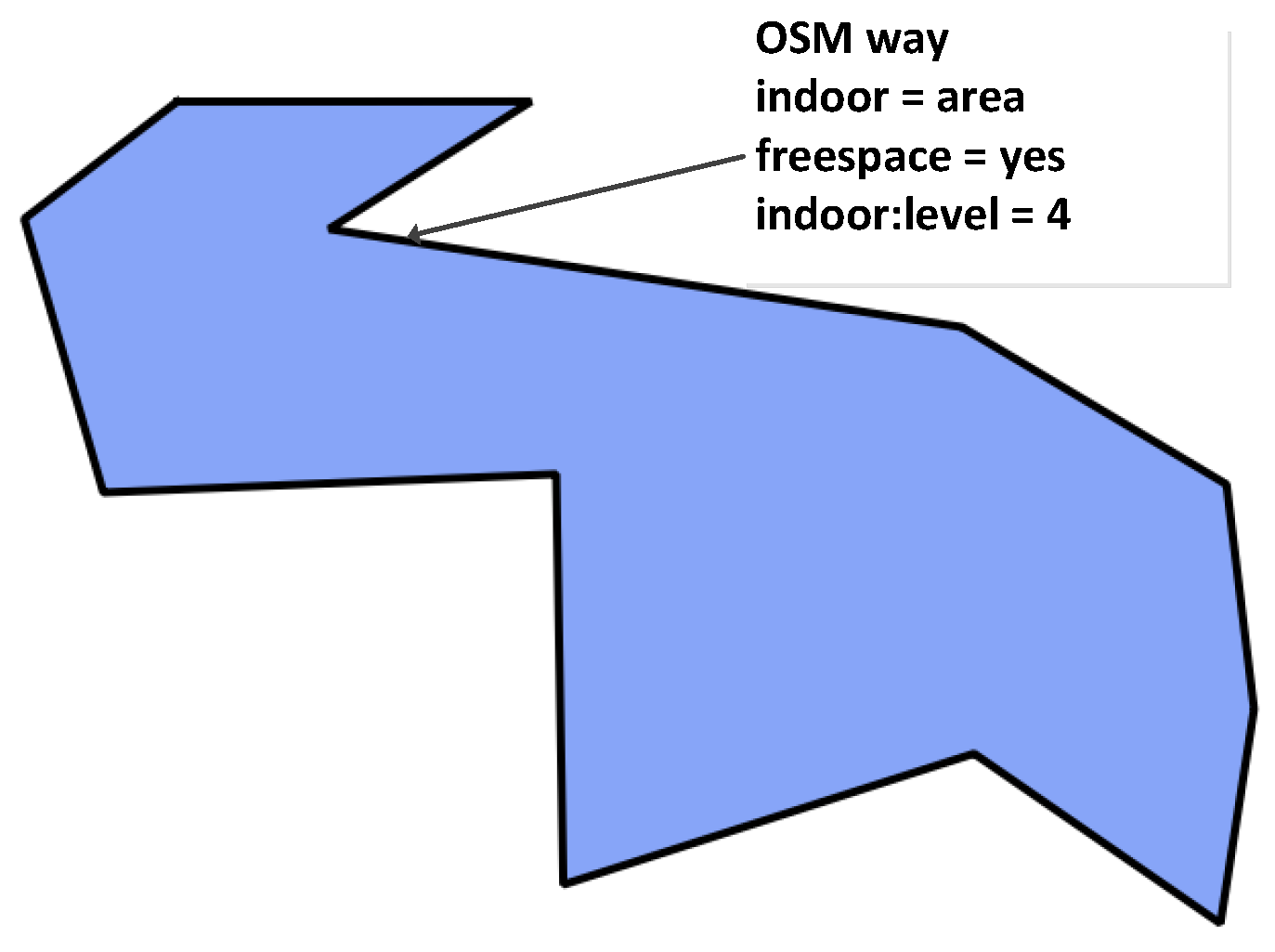
- Processing horizontal connections: Within each floor, we directly add indoor foot ways to the indoor navigation graph. For each room, a centroid node is generated based on its boundary and is connected to the doors of the room. For indoor open spaces, we first check that they contain the tag “free_space = yes”. If they do, we create a new sub-graph with a set of new edges using the visibility graph approach [29] and merge it with the indoor network.
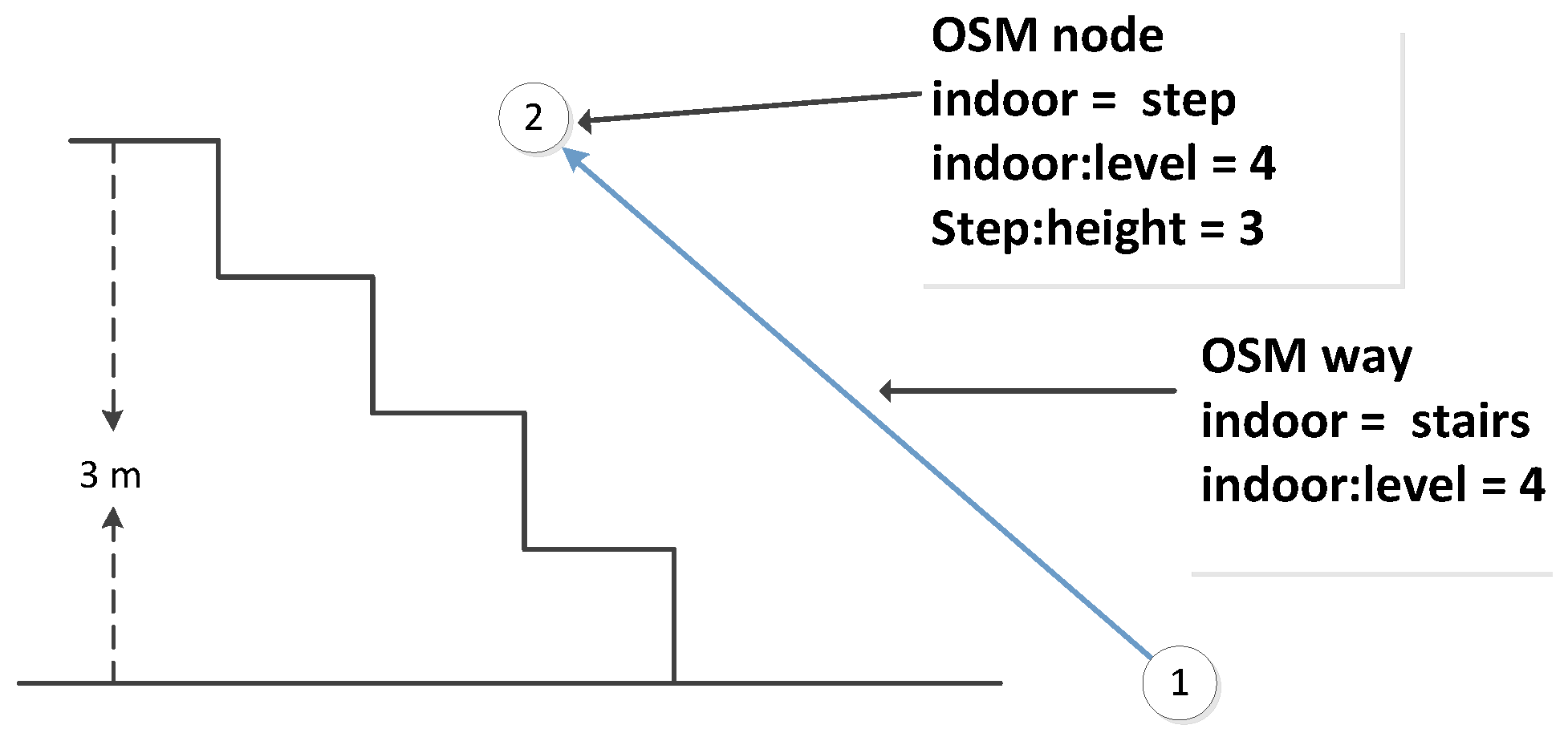
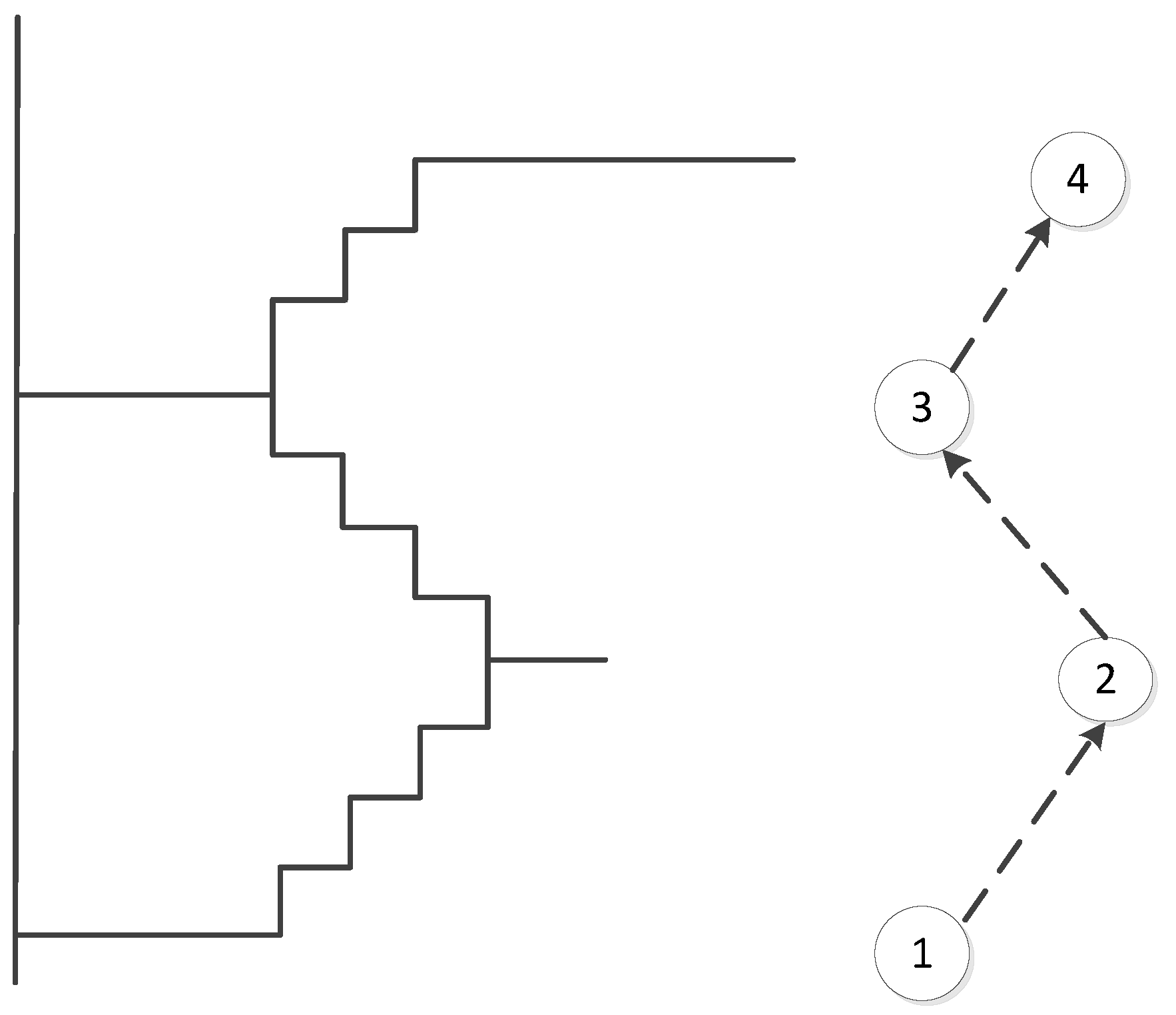
- Processing vertical connection: Stairs and escalators are processed in a similar way. We extract the OSM nodes that represent stairs and escalators along with their sequence and create a new edge between each pair of adjacent OSM nodes. Once this is done, the direction constraint (up or down) is obtained from the related tags of OSM ways and stored as an attribute of edges. For each elevator and each floor, we generate a center point based on the location of the elevator center and link it to the corresponding door of the elevator. The center points of the elevator at different floors are also connected to their adjacent points.
- Combining indoor networks with outdoor networks: The routing graph generated from one building is merged with the whole routing graph.
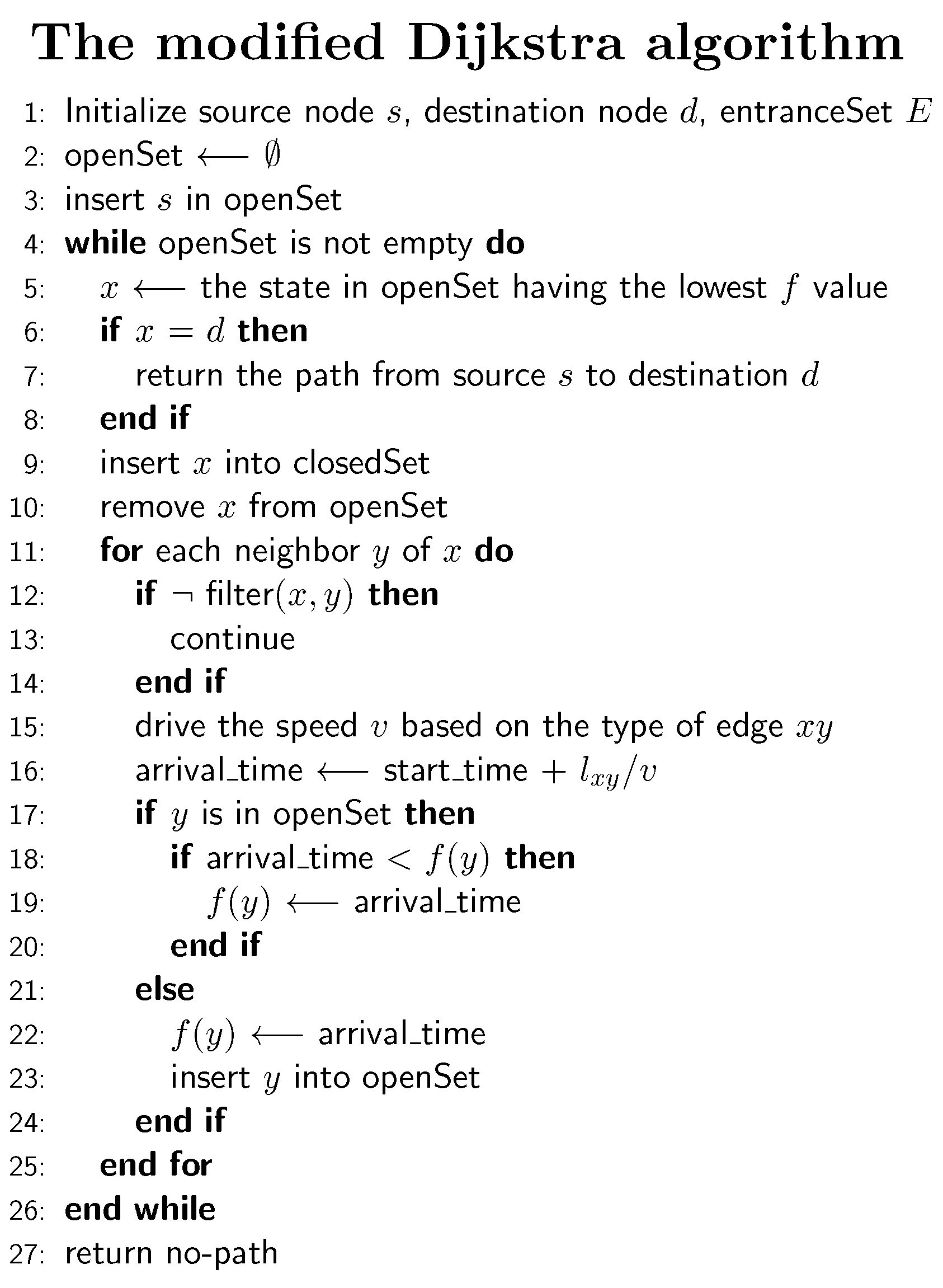
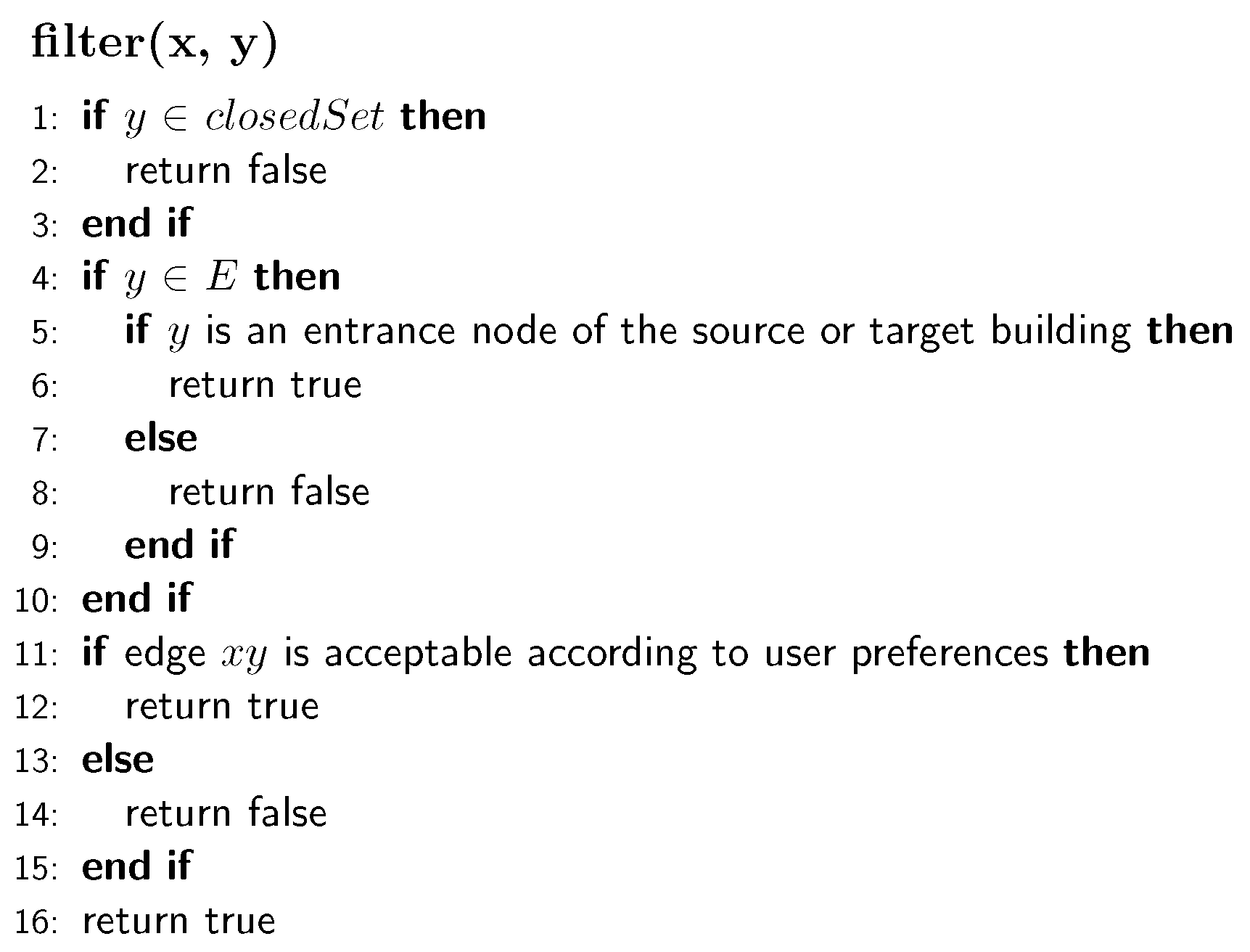
3.2. Routing Algorithm
4. Application Results
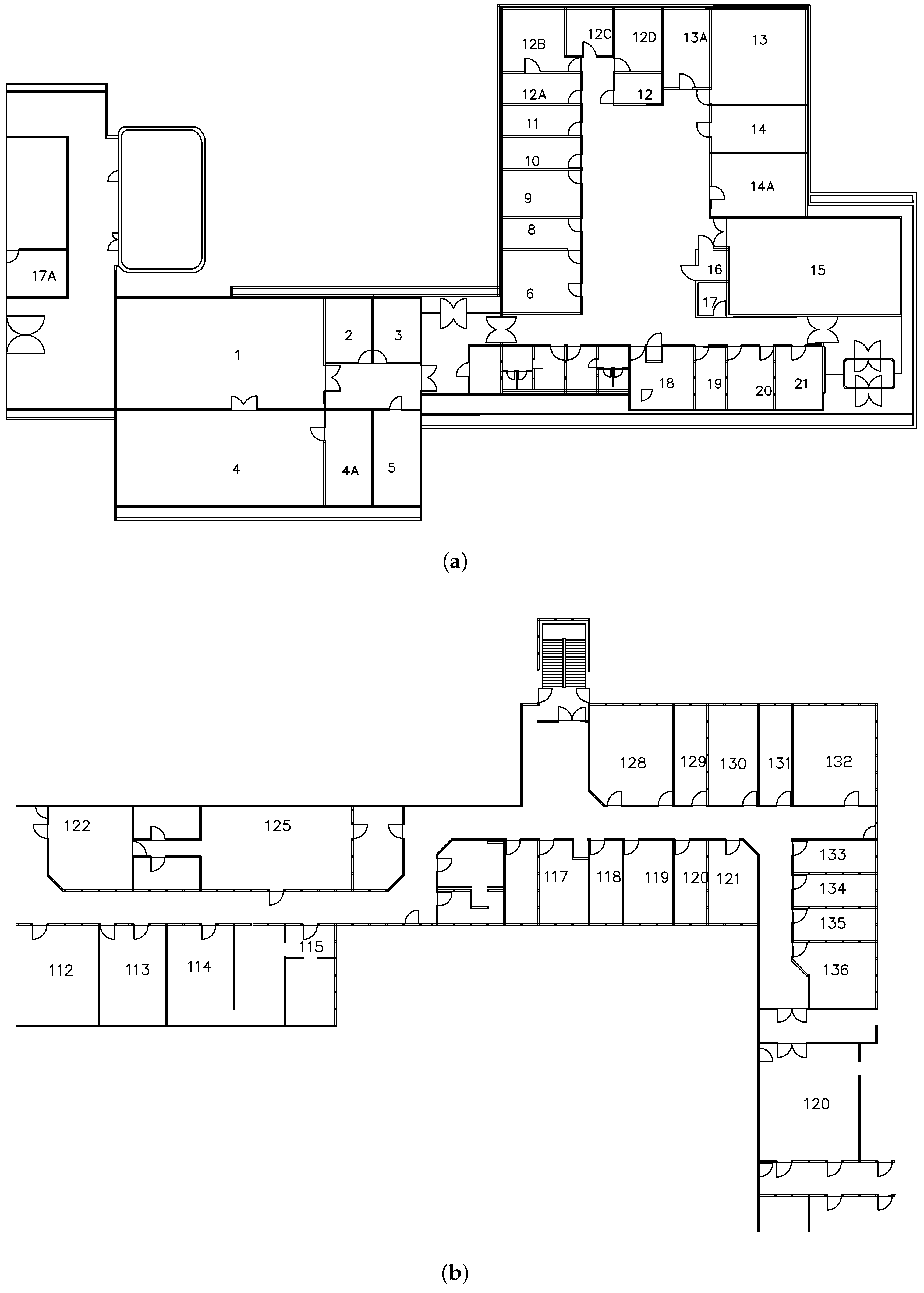
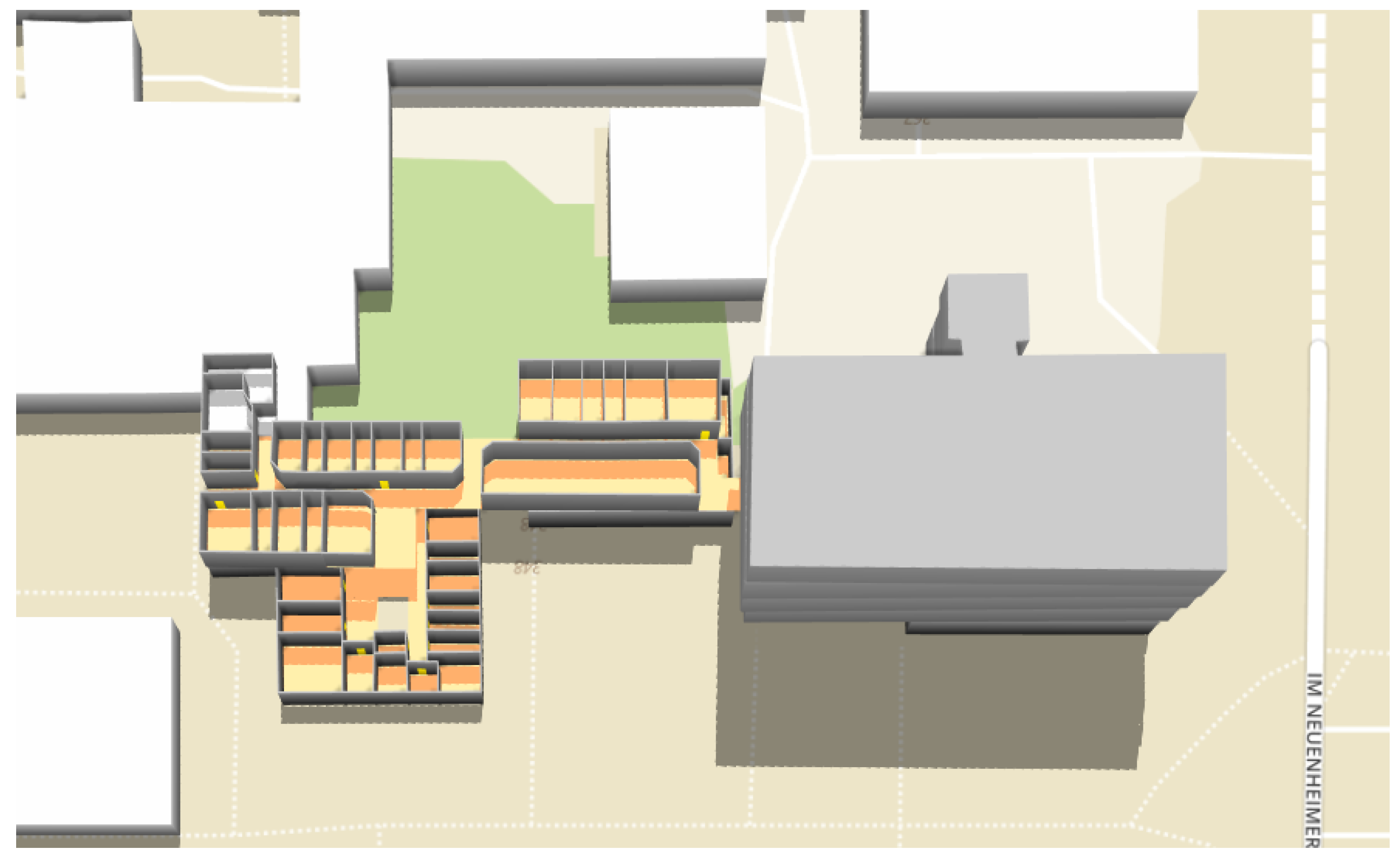
4.1. Case 1: Navigation within One Building
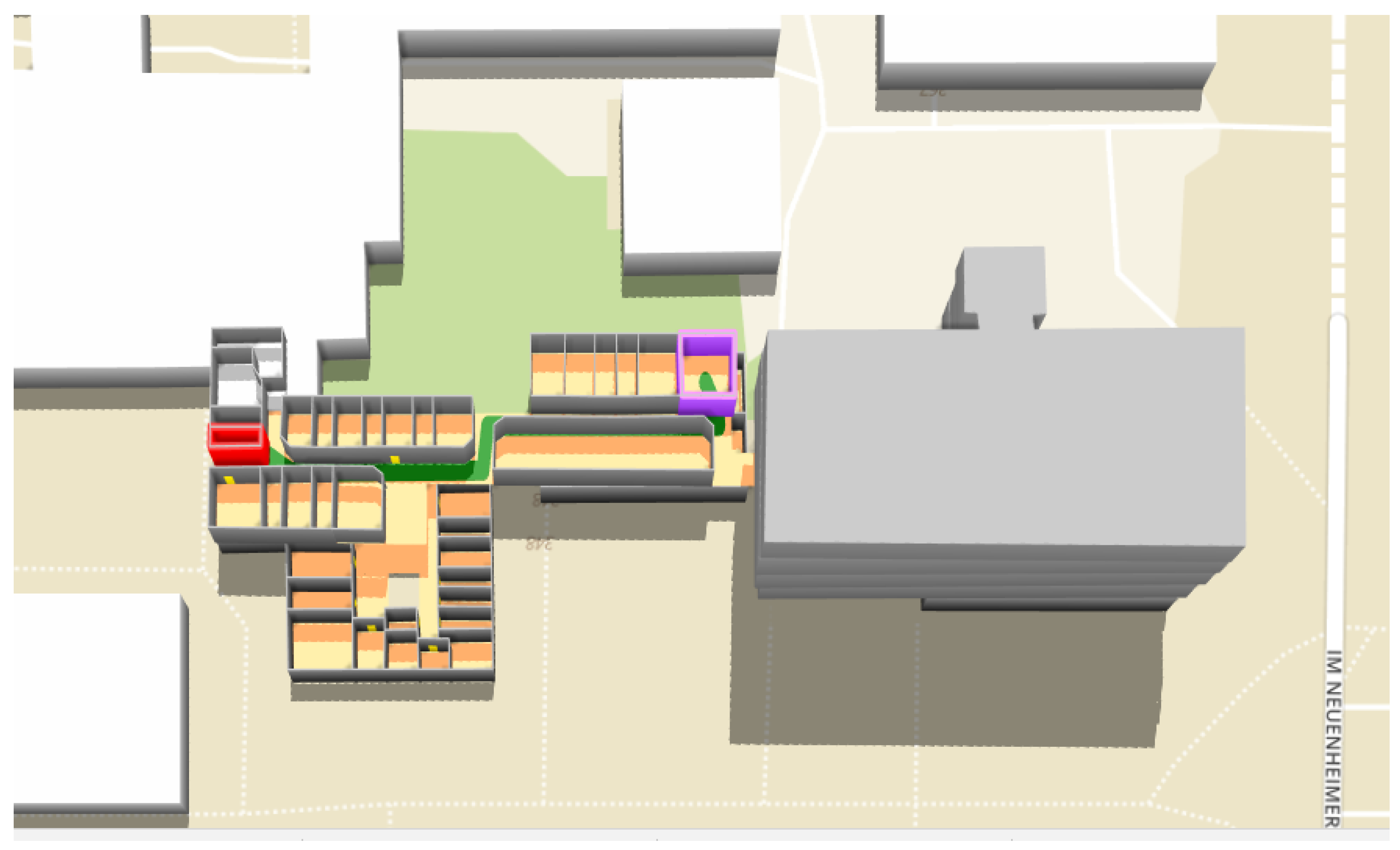
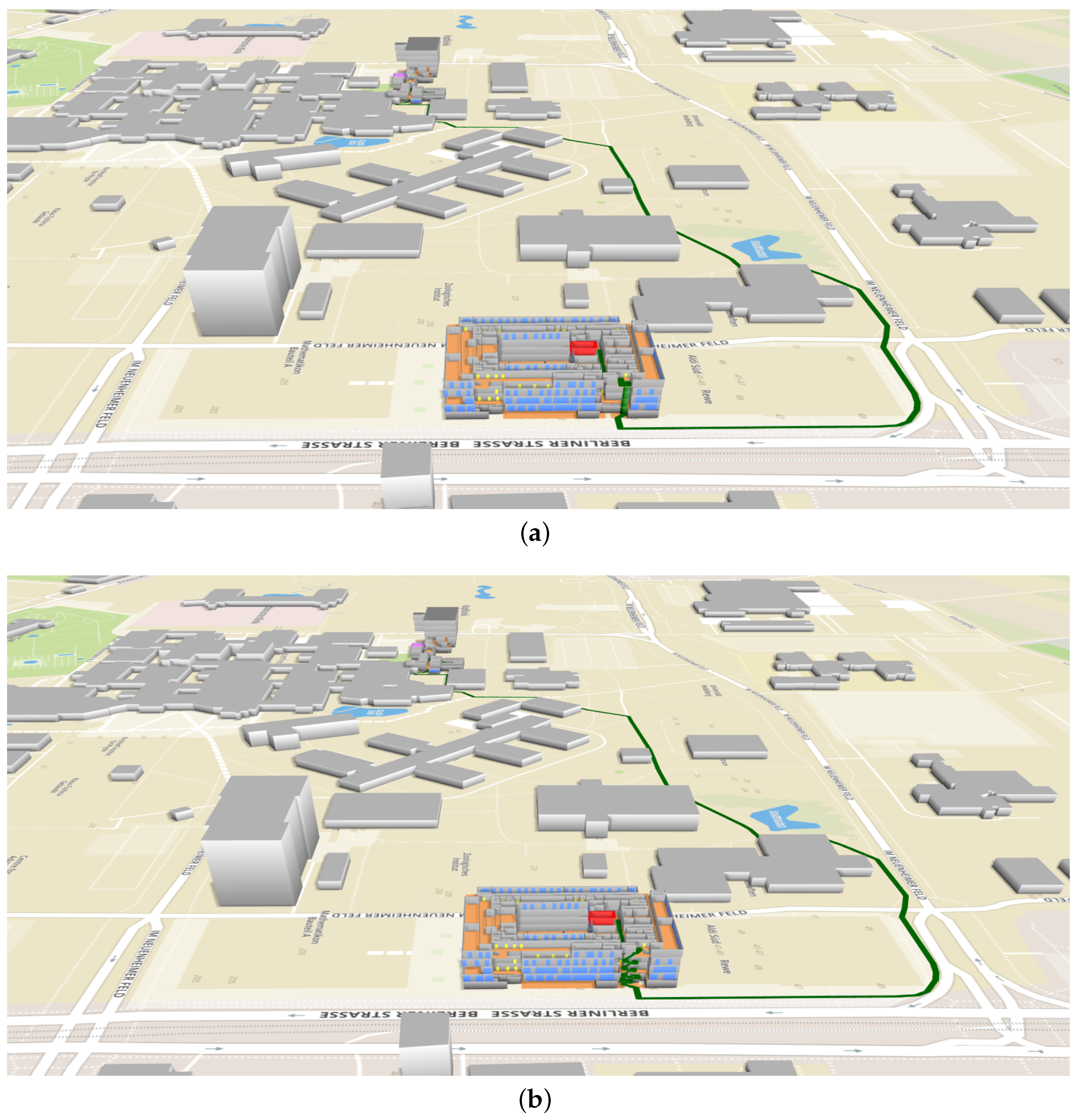
4.2. Case 2: Navigation from an Outdoor Point to an Indoor Room
4.3. Case 3: Navigation between Two Buildings
5. Conclusions and Future Works
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| VGI | Volunteered geographic information |
| OSM | Open Street Map |
| SLAM | Simultaneous localization and mapping |
| IMU | Inertial measurement unit |
| BIM | Building information |
| CityGML | City Geographic Markup Language |
| IFC | Industry Foundation Classes |
| OGC | Open Geospatial Consortium |
| F3DB | Full 3D buildings |
| UML | Unified Modeling Language |
| JOSM | Java OpenStreetMap |
References
- Zlatanova, S.; Liu, L.; Sithole, G.; Zhao, J.; Mortari, F.; Liu, L.; Sithole, G.; Zhao, J.; Mortari, F. Space Subdivision for Indoor Applications; OTB Research Institute for the Built Environment, Delft University of Technology: Delft, The Netherlands, 2014. [Google Scholar]
- Biljecki, F.; Stoter, J.; Ledoux, H.; Zlatanova, S.; Çöltekin, A. Applications of 3D city models: State of the art review. ISPRS Int. J. Geo-Inf. 2015, 4, 2842–2889. [Google Scholar] [CrossRef] [Green Version]
- Isikdag, U.; Zlatanova, S.; Underwood, J. A BIM-Oriented Model for supporting indoor navigation requirements. Comput. Environ. Urban Syst. 2013, 41, 112–123. [Google Scholar] [CrossRef]
- Liu, L.; Zlatanova, S. Generating navigation models from existing building data. Acquis. Model. Indoor Enclosed Environ. 2013, XL-4/W4, 19–25. [Google Scholar] [CrossRef]
- Goetz, M.; Zipf, A. Indoor route planning with volunteered geographic information on a (mobile) web-based platform. In Progress in Location-Based Services; Springer: Berlin/Heidelberg, Germany, 2013; pp. 211–231. [Google Scholar]
- Vanclooster, A.; De Maeyer, P. Combining indoor and outdoor navigation: The current approach of route planners. In Advances in Location-Based Services; Springer: Berlin/Heidelberg, Germany, 2012; pp. 283–303. [Google Scholar]
- Kwan, M.P.; Lee, J. Emergency response after 9/11: The potential of real-time 3D GIS for quick emergency response in micro-spatial environments. Comput. Environ. Urban Syst. 2005, 29, 93–113. [Google Scholar] [CrossRef]
- Teo, T.A.; Cho, K.H. BIM-oriented indoor network model for indoor and outdoor combined route planning. Adv. Eng. Inform. 2016, 30, 268–282. [Google Scholar] [CrossRef]
- Whiting, E.J. Geometric, Topological & Semantic Analysis of Multi-Building Floor Plan Data. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2006. [Google Scholar]
- Mandloi, D.; Thill, J.C. Object-oriented data modeling of an indoor/outdoor urban transportation network and route planning analysis. In Geospatial Analysis and Modelling of Urban Structure and Dynamics; Springer: Dordrecht, The Netherlands, 2010; pp. 197–220. [Google Scholar]
- Sui, D.; Goodchild, M. The convergence of GIS and social media: Challenges for GIScience. Int. J. Geogr. Inf. Sci. 2011, 25, 1737–1748. [Google Scholar] [CrossRef]
- Sieber, R. Public participation geographic information systems: A literature review and framework. Ann. Assoc. Am. Geogr. 2006, 96, 491–507. [Google Scholar] [CrossRef]
- Goodchild, M.F. Citizens as sensors: The world of volunteered geography. GeoJournal 2007, 69, 211–221. [Google Scholar] [CrossRef]
- Arsanjani, J.J.; Barron, C.; Bakillah, M.; Helbich, M. Assessing the quality of OpenStreetMap contributors together with their contributions. In Proceedings of the AGILE 2013, Nashville, TN, USA, 5–9 August 2013; pp. 14–17. [Google Scholar]
- Fan, H.; Zipf, A.; Fu, Q.; Neis, P. Quality assessment for building footprints data on OpenStreetMap. Int. J. Geogr. Inf. Sci. 2014, 28, 700–719. [Google Scholar] [CrossRef]
- Basiri, A.; Jackson, M.; Amirian, P.; Pourabdollah, A.; Sester, M.; Winstanley, A.; Moore, T.; Zhang, L. Quality assessment of OpenStreetMap data using trajectory mining. Geo-Spat. Inf. Sci. 2016, 19, 56–68. [Google Scholar] [CrossRef] [Green Version]
- Neis, P.; Zielstra, D. Generation of a tailored routing network for disabled people based on collaboratively collected geodata. Appl. Geogr. 2014, 47, 70–77. [Google Scholar] [CrossRef]
- Soden, R.; Palen, L. From crowdsourced mapping to community mapping: The post-earthquake work of OpenStreetMap Haiti. In Proceedings of the 11th International Conference on the Design of Cooperative Systems, COOP 2014, Nice, France, 27–30 May 2014; pp. 311–326. [Google Scholar]
- Kalantari, M.; La, V. Assessing OpenStreetMap as an open property map. In OpenStreetMap in GIScience; Springer: Basel, Switzerland, 2015; pp. 255–272. [Google Scholar]
- Goetz, M.; Zipf, A. Extending OpenStreetMap to indoor environments: Bringing volunteered geographic information to the next level. In Urban and Regional Data Management: UDMS Annual 2011; Taylor & Francis Group: London, UK, 2012; pp. 47–58. [Google Scholar]
- Peter, M. Crowd-Sourced Reconstruction of Building Interiors. Ph.D. Thesis, University of Stuttgart, Stuttgart, Germany, 2015. [Google Scholar]
- Hong, S.; Jung, J.; Kim, S.; Cho, H.; Lee, J.; Heo, J. Semi-automated approach to indoor mapping for 3D as-built building information modeling. Comput. Environ. Urban Syst. 2015, 51, 34–46. [Google Scholar] [CrossRef]
- Fernández-Caramés, C.; Serrano, F.J.; Moreno, V.; Curto, B.; Rodríguez-Aragón, J.F.; Alves, R. A real-time indoor localization approach integrated with a Geographic Information System (GIS). Robot. Auton. Syst. 2016, 75, 475–489. [Google Scholar] [CrossRef]
- Rocha, J.; Alves, N. OSM indoor: Moving forward. In Proceedings of the Open Source Geospatial Research & Education Symposium 2012, Yverdon-les-Bains, Switzerland, 24–26 October 2012; pp. 261–267. [Google Scholar]
- Weyrer, T.; Hochmair, H.; Paulus, G. Intermodal door-to-door routing for people with physical impairments in a web-based, open-source platform. Transp. Res. Rec. J. Transp. Res. Board 2014, 2469, 108–119. [Google Scholar] [CrossRef]
- Tashakkori, H.; Rajabifard, A.; Kalantari, M.; Aleksandrov, M. Indoor incident situation awareness using a 3D indoor/outdoor spatial city model. In Proceedings of the 2015 2nd International Conference on Information and Communication Technologies for Disaster Management (ICT-DM), Rennes, France, 30 November–2 December 2015; pp. 240–245. [Google Scholar]
- OSM Wiki. Simple Indoor Tagging. Available online: http://wiki.openstreetmap.org/wiki/Simple_Indoor_Tagging (accessed on 30 April 2017).
- OSM Wiki. Full 3D Building. Available online: http://wiki.openstreetmap.org/wiki/F3DB (accessed on 30 April 2017).
- Lavalle, S.M. Planning Algorithms; Cambridge University Press: Cambridge, UK, 2006. [Google Scholar]
- Dijkstra, E.W. A note on two problems in connexion with graphs. Numerische Mathematik 1959, 1, 269–271. [Google Scholar] [CrossRef] [Green Version]
- Fujiyama, T.; Tyler, N. Pedestrian speeds on stairs: An initial step for a simulation model. In Proceedings of the 36th Universities’ Transport Studies Group Conference, Newcastle upon Tyne, UK, January 2004; pp. 7C1.1–7C1.11. [Google Scholar]
- Wang, Z.; Zipf, A. Using Openstreetmap Data to Generate Building Models with Their Inner Structures for 3d Maps. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, IV-2/W4, 411–416. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Route ID | Starting Room | Ending Room | Calculated Distance (meters) | Reference Distance (meters) | Distance Difference (meters) | Relative Error |
|---|---|---|---|---|---|---|
| R1 | 21 | 12C | 33.4 | 31.9 | +1.5 | 4.7% |
| R2 | 12 | 3 | 40.0 | 39.9 | +0.1 | 0.2% |
| R3 | 20 | 11 | 25.7 | 25.1 | +0.6 | 2.6% |
| R4 | 2 | 19 | 34.7 | 32.5 | +2.2 | 6.8% |
| R5 | 9 | 21 | 26.3 | 26.1 | +0.2 | 0.8% |
| R6 | 6 | 12D | 22.2 | 22.8 | −0.6 | 2.6% |
| R7 | 117 | 20 | 38.5 | 40.3 | −1.8 | 4.5% |
| R8 | 133 | 112 | 53.2 | 50.7 | +2.5 | 4.9% |
| R9 | 112 | 117 | 21.9 | 22.8 | −0.9 | 3.9% |
| R10 | 19 | 133 | 51.0 | 51.7 | −0.7 | 1.4% |
| Scenario | Route ID | Total Travel Distance (meters) | Total Travel Time (min) | Number of Visited Nodes |
|---|---|---|---|---|
| S1 | R1 R2 | 647.3 647.3 | 8.1 7.7 | 790 911 |
| S2 | R3 R4 | 602.8 602.8 | 7.6 7.2 | 785 907 |
| S3 | R5 R6 | 730.9 730.9 | 9.1 8.8 | 880 1029 |
| S4 | R7 R8 | 925.4 925.4 | 11.5 11.1 | 981 1138 |
| S5 | R9 R10 | 482.7 482.7 | 6.2 5.8 | 650 757 |
| S6 | R11 R12 | 647.6 647.6 | 8.1 7.8 | 746 898 |
| Pair No. | Route ID | Total Travel Distance (meters) | Total Travel Time (min) | Use Elevators |
|---|---|---|---|---|
| P1 | R1 R2 | 831.1 858.7 | 9.8 10.7 | yes no |
| P2 | R3 R4 | 801.7 829.3 | 9.5 10.3 | yes no |
| P3 | R5 R6 | 787.3 814.9 | 9.3 10.2 | yes no |
| P4 | R7 R8 | 875.4 905.2 | 10.5 11.2 | yes no |
| P5 | R9 R10 | 827.2 856.9 | 9.8 10.5 | yes no |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Niu, L. A Data Model for Using OpenStreetMap to Integrate Indoor and Outdoor Route Planning. Sensors 2018, 18, 2100. https://doi.org/10.3390/s18072100
Wang Z, Niu L. A Data Model for Using OpenStreetMap to Integrate Indoor and Outdoor Route Planning. Sensors. 2018; 18(7):2100. https://doi.org/10.3390/s18072100
Chicago/Turabian StyleWang, Zhiyong, and Lei Niu. 2018. "A Data Model for Using OpenStreetMap to Integrate Indoor and Outdoor Route Planning" Sensors 18, no. 7: 2100. https://doi.org/10.3390/s18072100
APA StyleWang, Z., & Niu, L. (2018). A Data Model for Using OpenStreetMap to Integrate Indoor and Outdoor Route Planning. Sensors, 18(7), 2100. https://doi.org/10.3390/s18072100