Geometric Accuracy Evaluation of High-Resolution Satellite Images Based on Xianning Test Field


Abstract
:1. Introduction
2. Test Field Area and Data Sources
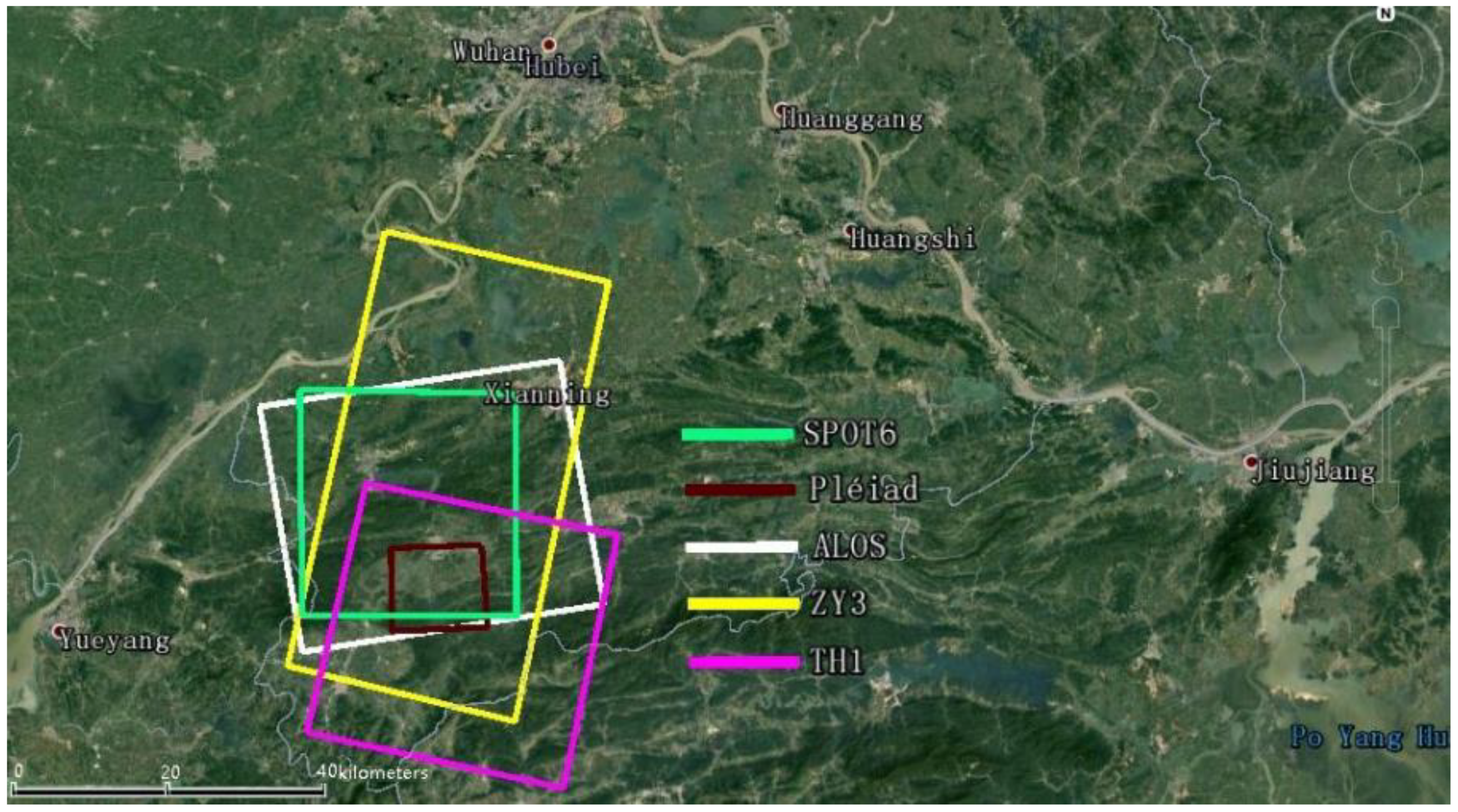
2.1. The Test Field
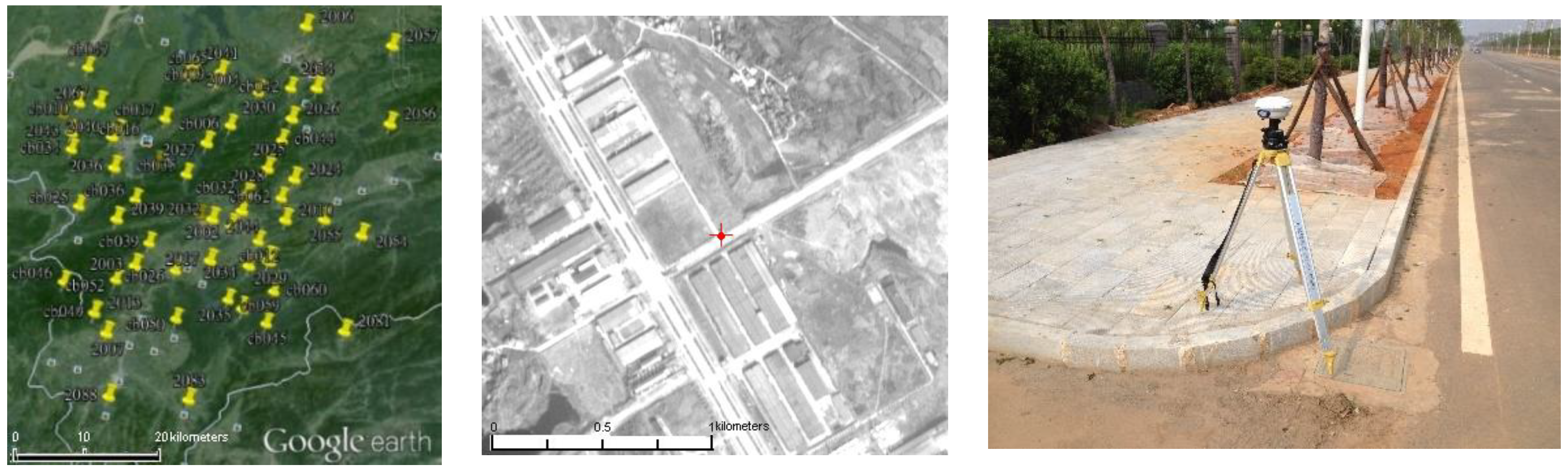
2.2. The GCPs
2.3. Multiple HRSIs Data
- Pleiades: The processing level is primary product. Primary product is the processing level closest to the natural image acquired by the sensor. This product restores perfect collections: the sensor is placed in rectilinear geometry, and the image is clear of all radiometric distortion. RPCs (Rational Polynomial Coefficients) and the sensor model are provided with the product. The data is a standard image product which includes nadir-forward-backward panchromatic images.
- SPOT-6: The processing level is primary product. The image is corrected for radiometric and sensor distortions, using internal calibration parameters, ephemeris and attitude measurements. RPCs and the sensor model are provided with the product. The data is a standard image product which includes nadir-forward-backward panchromatic images.
- ALOS PRISM: The processing level is 1B1 product. On the basis of Level 1A, the data with radiometric correction and added absolute calibration coefficient. RPCs and the sensor model are provided with the product. The data is a standard image product which includes nadir-forward-backward panchromatic images.
- ZY-3: The processing level is Sensor Corrected, i.e., the images are radiometrically and sensor corrected, but not projected to a plane using a map projection or datum, thus keeping the original acquisition geometry. The images were provided with RPCs. The data is a long strip image product which includes nadir-forward-backward panchromatic images [17].
- TH-1: the processing level is 1B; for each image, the RPCs were provided. The images are radiometrically and sensor corrected. The data is a standard image product which includes nadir-forward-backward panchromatic images. Other details about the characteristics of various satellite sensors are listed in Table 2.
3. General Geometric Processing Model of HRSIs
4. Validation of Geometric Accuracy for HRSIs
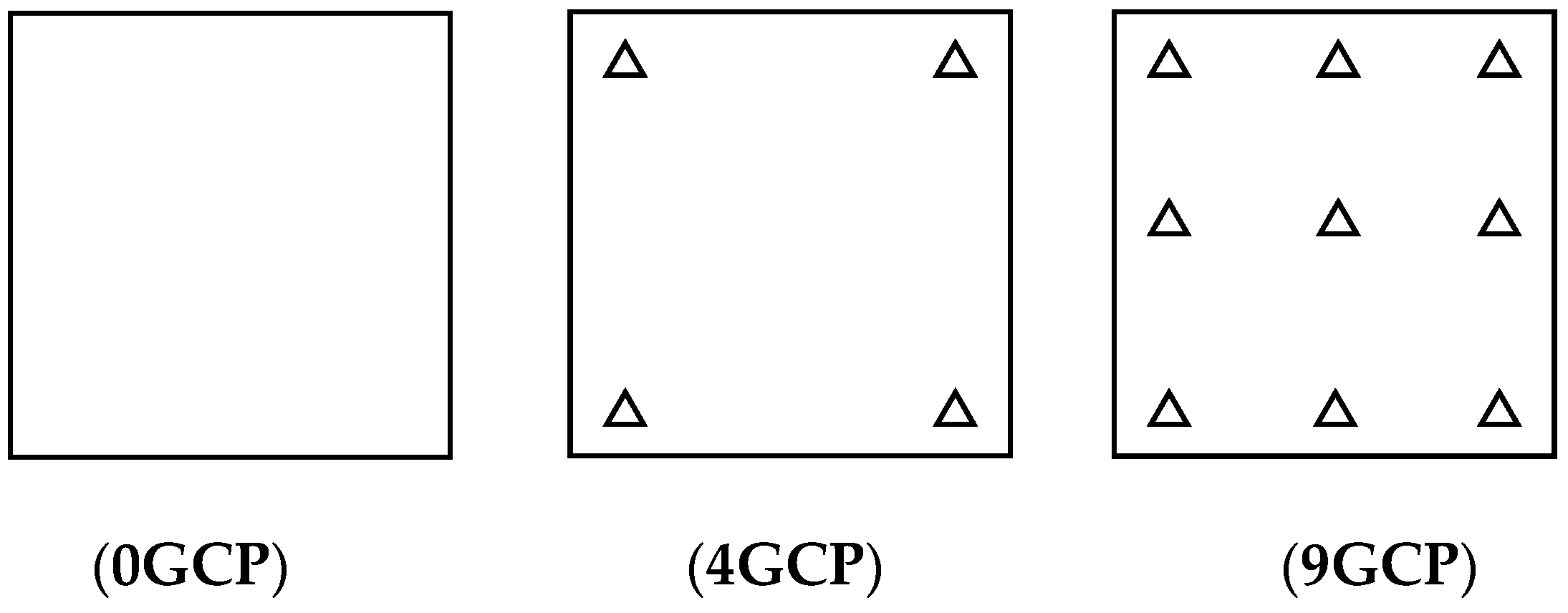
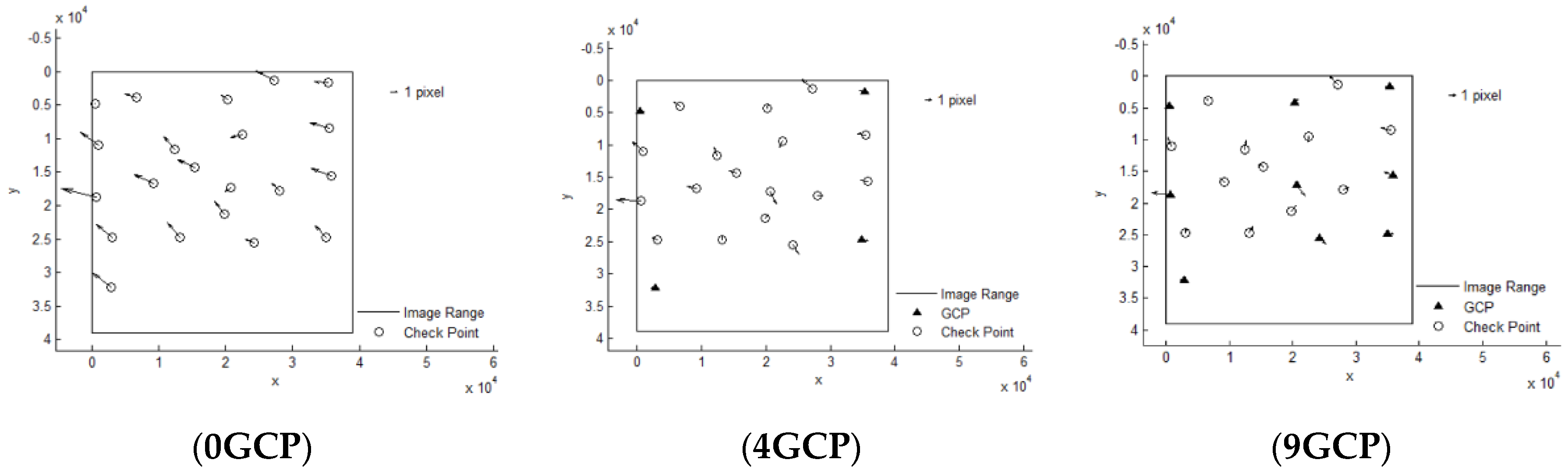
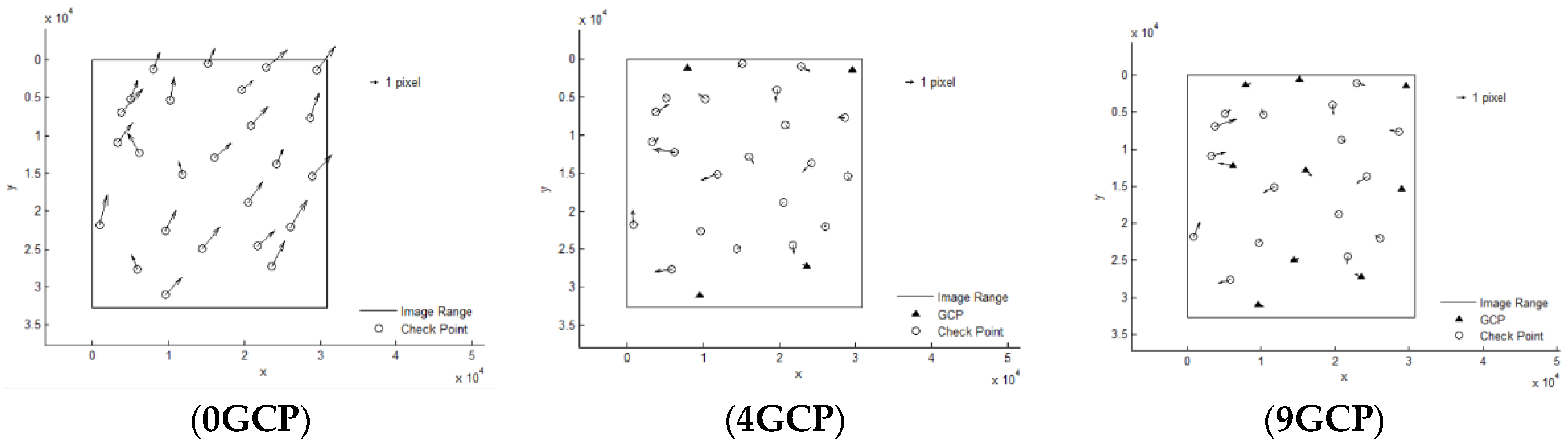
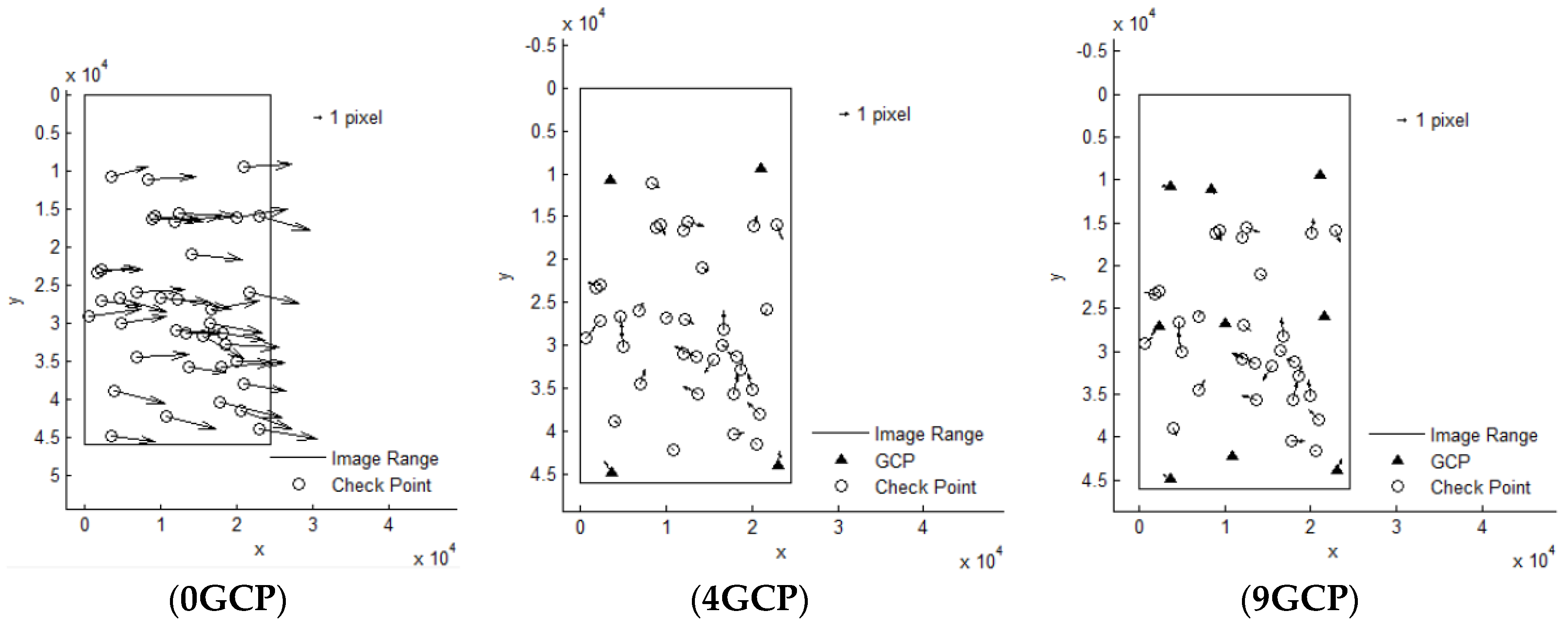
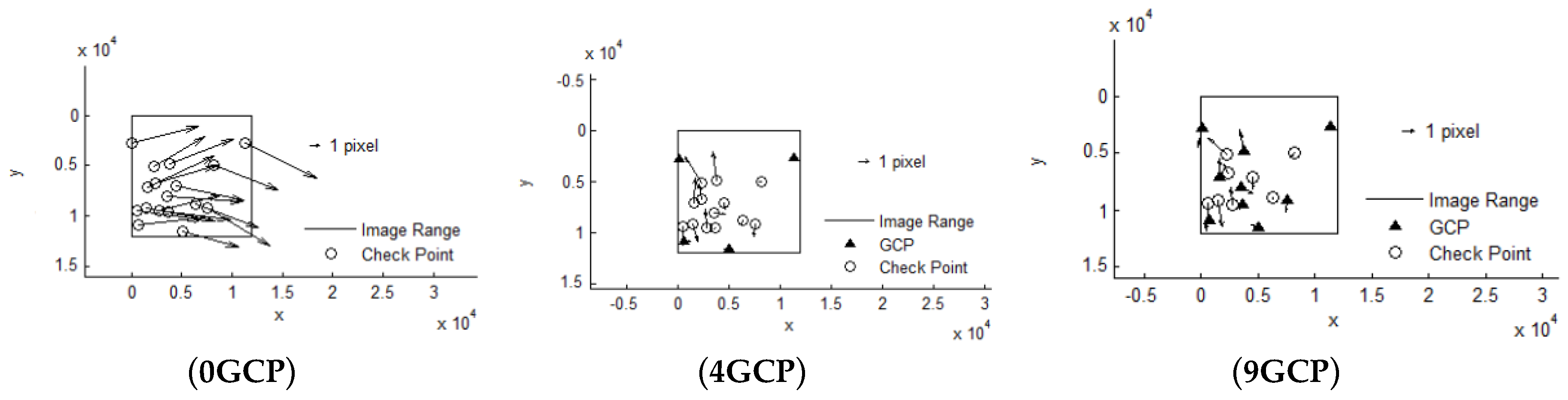
4.1. Orientation Accuracy with Single Image
4.2. Orientation Accuracy of Block Adjustment with Tri-Stereo Images
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Komus, W.; Lehner, M.; Blechinger, F.; Putz, E. Geometric calibration of the stereoscopic CCD-line-scanner MOMS-2P. Int. Arch. Photogramm. Remote Sens. 1996, 31, 90–98. [Google Scholar]
- Komus, W.; Lehner, M.; Schroeder, M. Geometric in-flight calibration of the stereoscopic CCD-line-scanner MOMS-2P. ISPRS J. Photogramm. Remote Sens. 2000, 55, 59–71. [Google Scholar]
- Fraser, C.; Hanley, H.; Yamakawa, T. Three-Dimensional Geopositioning Accuracy of Ikonos Imagery. Photogramm. Rec. 2002, 17, 465–479. [Google Scholar] [CrossRef]
- Tadono, T.; Shimada, M.; Watanabe, M.; Hashimoto, T.; Iwata, T. Calibration and validation of PRISM onboard ALOS. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2004, 35, 13–18. [Google Scholar]
- Honkavaara, E.; Peltoniemi, J.; Ahokas, E.; Kuittinen, R.; Hyyppä, J.; Jaakkola, J.; Kaartinen, H.; Markelin, L.; Nurminen, K.; Suomalainen, J. A Permanent Test Field for Digital Photogrammetric systems. Photogramm. Eng. Remote Sens. 2008, 74, 95–106. [Google Scholar] [CrossRef]
- Meguro, Y.; Fraser, C.S. Georeferencing accuracy of Geoeye-1 stereo imagery: Experiences in a Japanese test field. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2010, 38, 1069–1072. [Google Scholar]
- Dolloff, J.; Settergren, R. Worldview-1 stereo extraction accuracy without MIN processing. In Proceedings of the ASPRS 2010 Annual Conference, San Diego, CA, USA, 26–30 April 2010. [Google Scholar]
- Agugiaro, G.; Poli, D.; Remondino, F. Testfield Trento: Geometric evaluation of very high resolution satellite imagery. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 39, B8. [Google Scholar] [CrossRef]
- Topan, H.; Maktav, D. Efficiency of Orientation Parameters on Georeferencing Accuracy of SPOT-5 HRG Level-1A Stereoimages. IEEE Trans. Geosci. Remote Sens. 2014, 52, 3683–3694. [Google Scholar] [CrossRef]
- Wang, T.Y.; Zhang, G.; Li, D.R.; Tang, X.M.; Jiang, Y.H.; Pan, H.B.; Zhu, X.Y.; Fang, C. Geometric accuracy validation for ZY-3 satellite imagery. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1168–1171. [Google Scholar] [CrossRef]
- Wang, T.; Zhang, G.; Li, D.; Tang, X.M.; Jiang, Y.H.; Pan, H.B.; Zhu, X.Y. Planar Block Adjustment and Orthorectification of ZY-3 Satellite Images. Photogramm. Eng. Remote Sens. 2014, 80, 559–570. [Google Scholar] [CrossRef]
- Zhang, G.; Wang, T.Y.; Li, D.; Tang, X.; Jiang, Y.H.; Huang, W.C.; Pan, H. Block adjustment for satellite imagery based on the strip constraint. IEEE Trans. Geosci. Remote Sens. 2015, 53, 933–941. [Google Scholar] [CrossRef]
- Pan, H.; Tao, C.; Zou, Z. Precise georeferencing using the rigorous sensor model and rational function model for ZiYuan-3 strip scenes with minimum control. ISPRS J. Photogramm. Remote Sens. 2016, 119, 259–266. [Google Scholar] [CrossRef]
- Pan, H. Geolocation error tracking of ZY-3 three line cameras. ISPRS J. Photogramm. Remote Sens. 2017, 123, 62–74. [Google Scholar] [CrossRef]
- Li, D.; Zhang, G.; Jiang, Y.; Shen, X. Research on image geometric precision of domestic optical satellites. Spacecr. Eng. 2016, 25, 1–9. [Google Scholar]
- Tian, G.; Huang, Q.; He, H.; Xia, Z. Analysis on Geometric Positioning Accuracy Evaluation of Remote Sensing Satellite Image. Spacecr. Recovery Remote Sens. 2017, 38, 106–112. [Google Scholar]
- Pan, H.; Zhang, G.; Tang, X.; Li, D.; Zhu, X.; Zhou, P.; Jiang, Y. Basic Products of the ZiYuan-3 Satellite and Accuracy Evaluation. Photogramm. Eng. Remote Sens. 2013, 79, 1131–1145. [Google Scholar] [CrossRef]
- Toutin, T. Comparison of 3D physical and empirical models for generating DSMs from stereo HR images. Photogramm. Eng. Remote Sens. 2006, 72, 597–604. [Google Scholar] [CrossRef]
- Teo, T.-A. Bias compensation in a rigorous sensor model and rational function model for high-resolution satellite images. Photogramm. Eng. Remote Sens. 2011, 77, 1211–1220. [Google Scholar] [CrossRef]
- Tao, C.V.; Hu, Y. A comprehensive study of the rational function model for photogrammetric processing. Photogramm. Eng. Remote Sens. 2001, 67, 1347–1357. [Google Scholar]
- Fraser, C.S.; Hanley, H.B. Bias compensation in rational functions for IKONOS satellite imagery. Photogramm. Eng. Remote Sens. 2003, 69, 53–57. [Google Scholar] [CrossRef]
- Brovelli, M.A.; Mattia, M.; Fratarcangeli, F.; Giannone, F.; Realini, E. Accuracy assessment of high resolution satellite imagery orientation by leave-one-out method. ISPRS J. Photogramm. Remote Sens. 2008, 63, 427–440. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite | Nation | Launch Date | Bands | Spatial Resolution/m | Width/km |
|---|---|---|---|---|---|
| IKONOS | America | 24 September 1999 | PAN/MS | 1/4 | 11 |
| QuickBird | America | 18 October 2001 | PAN/MS | 0.61/2.44 | 16.5 |
| SPOT-5 | France | 4 May 2002 | PAN/MS/SWIR | 2.5/10/20 | 60 |
| SPOT-6 | France | 9 September 2012 | PAN/MS | 1.5/6.0 | 60 |
| CBERS-02B | China | 21 October 2003 | PAN/MS | 2.36/20 | 27 |
| Cartosat-1 | India | 5 May 2005 | PAN | 2.5 (forward), 2.2 (backward) | 26 |
| ALOS | Japan | 24 January 2006 | PAN/MS | 2.5/10 | 35/70 |
| EROS-B | Israel | 25 April 2006 | PAN | 0.7 | 14 |
| Cartosat-2 | India | 10 January 2007 | PAN | <1 | 10 |
| WorldView-1 | America | 18 September 2007 | PAN | 0.5 | 17.6 |
| GeoEye-1 | America | 6 September 2008 | PAN/MS | 0.41/1.65 | 15.2 |
| WorldView-2 | America | 8 October 2009 | PAN/MS | 0.46/1.84 | 16.4 |
| WorldView-3 | America | 13 August 2014 | PAN/MS/SWIR | 0.31/1.24 | 13.2 |
| ZY3 | China | 9 January 2012 | PAN/MS | 2.1 (nadir)/3.5 (forward, backward)/5.8 | 52 |
| TH-1 | China | 24 August 2010 | PAN/MS | 2 (HR)/5 (forward, backward, nadir)/10 | 60 |
| Pléiades | France | 17 December 2011 | PAN/MS | 0.5/2.0 | 20 |
| Satellite | Pléiades | SPOT-6 | ALOS PRISM | ZY3 | TH1 |
| Country | France | France | Japan | China | China |
| Imaging Time | 12 July 2013 | 11 July 2013 | 27 September 2006 | 16 February 2013 | 8 June 2013 |
| Spatial Resolution | Panchromatic: 0.5 m Multispectral: 2 m | Panchromatic: 1.5 m Multispectral: 6 m | Panchromatic: 2.5 m Multispectral: 10 m | Panchromatic: 2.1 m/3.5 m Multispectral: 5.8 m | Panchromatic: 2 m Multispectral: 10 m Three line array: 5 m |
| Orbit Height | 694 km | 695 km | 692 km | 506 km | 500 km |
| Nominal Positioning Accuracy | 8.5 m | 35 m | 50 m | 50 m | 200 m |
| Width of Image | 20 km | 60 km | 35 km | 50 km | 60 km |
| Side Pendulum Angle | Standard: ±30° Max: ±47° | Standard: ±30° Max: ±45° | ±44° | ±32° | ±32° |
| Focal Length | 12.905 m | 6.023 m | 1.939 m | 1.7 m | 2.187 m |
| Pixel Size | 13 µm | 13 µm | 7 µm | 7 µm | 8 µm |
| Data Level | primary product | Standard product | Level 1B1 | SC | Level 1B |
| Base to Height Ratio | 0.3 | 0.4 | 1 | 0.88 | 1 |
| Stereoscopic Mode | Along-track/Across-track | Along-track/Across-track | Along-track/Across-track | Along-track | Along-track |
| Imaging Mode | Three line array/pushbroom | Three line array/pushbroom | Three line array/pushbroom | Three line array/pushbroom | Three line array/pushbroom |
| Satellite | Number of GCP | Number of ICP | RMSE of GCP (Pixels) | RMSE of ICP (Pixels) | ||||
|---|---|---|---|---|---|---|---|---|
| x | y | Plane | x | y | Plane | |||
| Pleaides | 0 | 21 | - | - | - | 2.300 | 1.344 | 2.664 |
| 4 | 17 | 0.768 | 0.082 | 0.772 | 0.929 | 1.322 | 1.591 | |
| 9 | 12 | 1.370 | 0.700 | 1.538 | 0.760 | 0.891 | 1.172 | |
| SPOT6 | 0 | 26 | - | - | - | 1.655 | 2.556 | 3.045 |
| 4 | 22 | 0.381 | 0.166 | 0.415 | 1.121 | 0.821 | 1.390 | |
| 9 | 17 | 0.876 | 0.357 | 0.946 | 1.217 | 0.817 | 1.466 | |
| ALOS | 0 | 11 | - | - | - | 2.193 | 3.943 | 4.511 |
| 4 | 7 | 0.300 | 0.404 | 0.503 | 0.972 | 0.703 | 1.199 | |
| 9 | 2 | 0.768 | 0.560 | 0.951 | 0.337 | 0.698 | 0.775 | |
| ZY-3 | 0 | 38 | - | - | - | 6.342 | 1.180 | 6.451 |
| 4 | 34 | 0.362 | 0.175 | 0.402 | 0.872 | 1.160 | 1.451 | |
| 9 | 29 | 0.546 | 0.479 | 0.726 | 0.853 | 1.123 | 1.410 | |
| TH-1 | 0 | 17 | - | - | - | 6.413 | 2.158 | 6.766 |
| 4 | 13 | 0.444 | 0.049 | 0.447 | 0.591 | 1.622 | 1.726 | |
| 9 | 8 | 0.493 | 1.100 | 1.205 | 0.639 | 1.467 | 1.600 | |
| Satellite | Number of GCP | Number of ICP | RMSE of GCP (m) | RMSE of ICP (m) | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| x | y | Plane | Height | x | y | Plane | Height | |||
| Pleaides | 0 | 21 | - | - | - | - | 0.588 | 0.628 | 0.860 | 2.654 |
| 4 | 17 | 0.123 | 0.044 | 0.130 | 1.977 | 0.510 | 0.445 | 0.677 | 1.505 | |
| 9 | 12 | 0.574 | 0.340 | 0.667 | 1.530 | 0.403 | 0.395 | 0.564 | 1.377 | |
| SPOT6 | 0 | 26 | - | - | - | - | 3.362 | 4.144 | 5.336 | 4.595 |
| 4 | 22 | 0.121 | 0.329 | 0.351 | 0.917 | 1.842 | 1.169 | 2.182 | 2.129 | |
| 9 | 17 | 1.231 | 0.480 | 1.321 | 2.209 | 2.006 | 1.309 | 2.396 | 2.294 | |
| ALOS | 0 | 16 | - | - | - | - | 8.677 | 31.588 | 32.758 | 11.832 |
| 4 | 12 | 1.639 | 1.489 | 2.214 | 0.717 | 1.655 | 2.381 | 2.900 | 1.363 | |
| 9 | 7 | 1.263 | 1.393 | 1.880 | 1.326 | 1.681 | 3.208 | 3.621 | 2.125 | |
| ZY-3 | 0 | 38 | - | - | - | - | 12.818 | 4.263 | 13.508 | 11.528 |
| 4 | 34 | 0.030 | 0.289 | 0.291 | 0.259 | 1.565 | 2.142 | 2.653 | 1.858 | |
| 9 | 29 | 0.355 | 0.257 | 0.438 | 1.442 | 1.640 | 2.356 | 2.870 | 1.937 | |
| TH-1 | 0 | 32 | - | - | - | - | 29.095 | 15.089 | 32.775 | 12.228 |
| 4 | 28 | 0.001 | 0.001 | 0.001 | 0.001 | 8.703 | 14.780 | 17.152 | 7.467 | |
| 9 | 23 | 0.687 | 4.306 | 4.361 | 1.900 | 4.770 | 8.674 | 9.899 | 5.028 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, X.; Huang, Q.; Wang, J.; Wang, T.; Zhang, G. Geometric Accuracy Evaluation of High-Resolution Satellite Images Based on Xianning Test Field. Sensors 2018, 18, 2121. https://doi.org/10.3390/s18072121
Zheng X, Huang Q, Wang J, Wang T, Zhang G. Geometric Accuracy Evaluation of High-Resolution Satellite Images Based on Xianning Test Field. Sensors. 2018; 18(7):2121. https://doi.org/10.3390/s18072121
Chicago/Turabian StyleZheng, Xiongwei, Qi Huang, Jingjing Wang, Taoyang Wang, and Guo Zhang. 2018. "Geometric Accuracy Evaluation of High-Resolution Satellite Images Based on Xianning Test Field" Sensors 18, no. 7: 2121. https://doi.org/10.3390/s18072121
APA StyleZheng, X., Huang, Q., Wang, J., Wang, T., & Zhang, G. (2018). Geometric Accuracy Evaluation of High-Resolution Satellite Images Based on Xianning Test Field. Sensors, 18(7), 2121. https://doi.org/10.3390/s18072121