4.1. First Studies
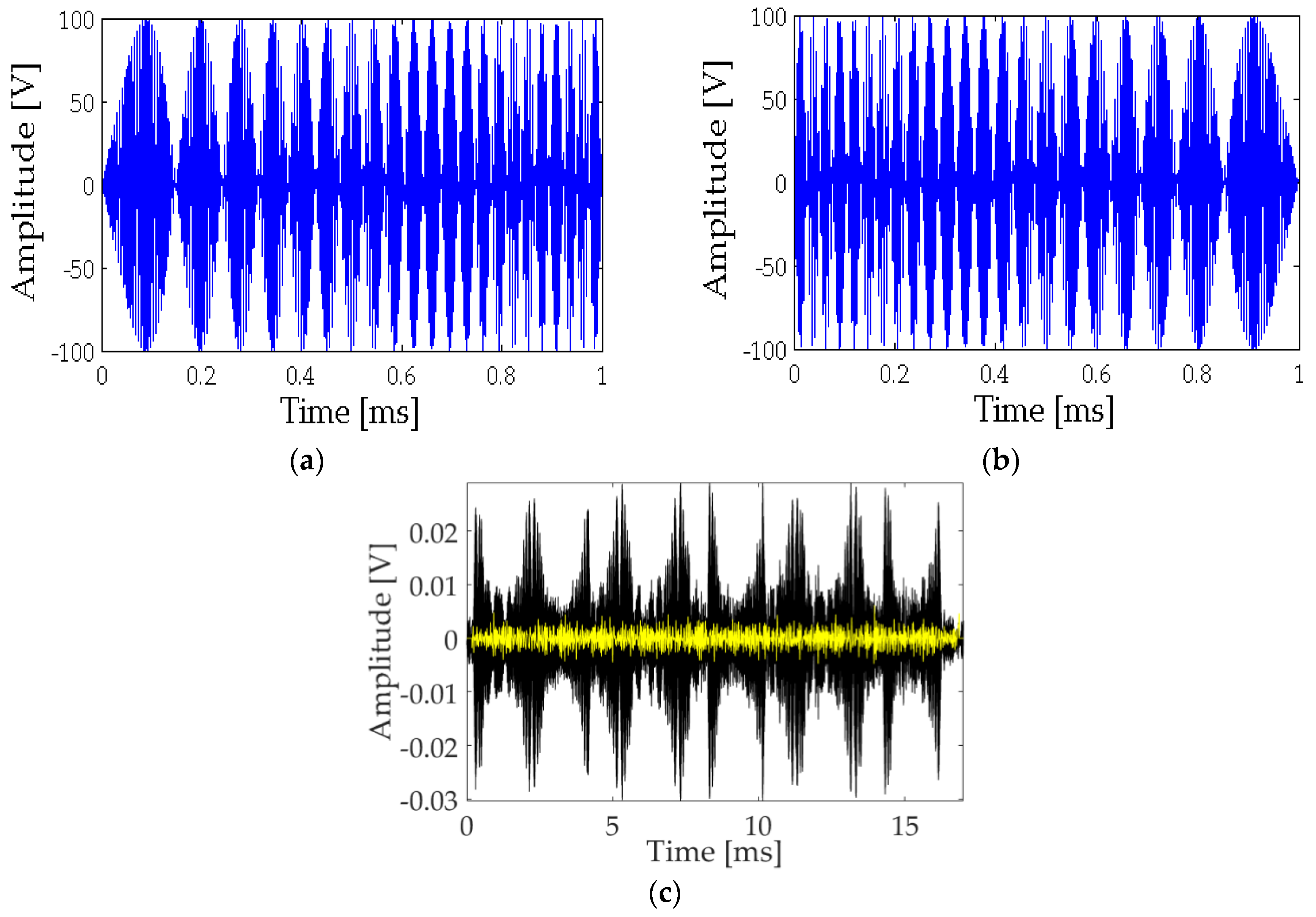
The study for the parametric generation of a sine sweep signal with the emitting transducer was carried out by emitting frequency-modulated signals with carrier frequency of 200 kHz. Two modulated sine sweep signals were used as basic codification of the information: bit 1, upwards from 4 to 40 kHz, and bit 0, downwards from 40 to 4 kHz, corresponding to
Figure 3a,b, respectively.
Figure 3c shows the received signal being a mixture of the primary beam at 200 kHz and the secondary beam at low frequency produced by the parametric effect. In order to distinguish the secondary beam, a bandpass filter (2 to 42 kHz) was applied. The secondary beam (yellow) is multiplied by a factor of 20 to be visible along with the original received signal.
A parametric sine sweep signal with a frequency bandwidth of 4 to 40 kHz with a duration of 1 ms and a carrier frequency
is then used for the communication study. The idea is to generate a 16-bit string = 1010010110010110, code of ones and zeros with this signal; where bit 1 corresponds to the sine sweep signal from 4 to 40 kHz and bit 0 corresponds to a sine sweep signal from 40 to 4 kHz. Using cross correlation techniques, it is possible to recognize the parametric signal since the correlation produces a clear narrow peak on the signal arrival time, which allows it to be distinguished from near echoes, and increases the signal to noise ratio [
8,
11].
The signals emitted for bit 1 and bit 0, as well as the received signal for the string are shown in
Figure 3.
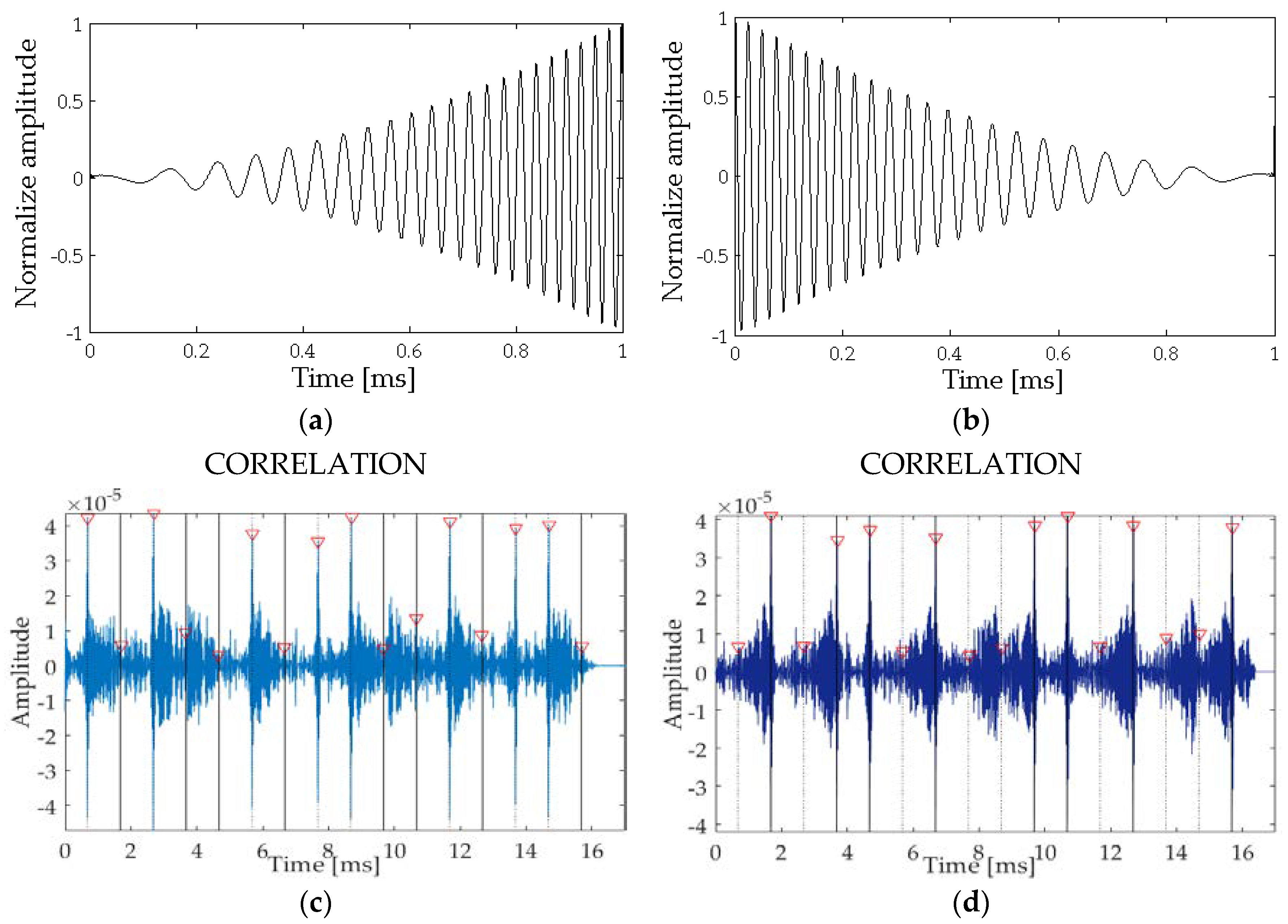
The expected secondary beams, that is, the second derivative of the envelope to the square of the signals emitted are presented in
Figure 4a,b for bits 1 and 0, respectively.
Figure 4c,d show the results of the cross-correlation between the received signal filtered at low frequency containing the 16-bits string (
Figure 3c, yellow) with the expected secondary beams for bits 1 and 0 (
Figure 4a,b). Thus, one can observe that correlating with bit 1 the cross-correlation amplitudes for the positions of bit 1 of the string are much greater than the corresponding amplitudes for bit 0. In the same way, the positions of bit 0 are clearly enhanced in the correlation amplitudes when correlating with bit 0.
Obtained the amplitude voltage by cross-correlation for the detection of bit 1 and 0, presented in
Figure 4c,d, and specified in
Table 2, a parameter, called Relative Amplitude
, is introduced for bit detection analysis. It is defined as:
where
is the amplitude for the true bit, that is; the one that should be in correlation with the bit emitted (1 or 0) and
is a false bit since it is the bit not being emitted. In this sense, if the bit is detected correctly, the value
will be greater than
and therefore the
values will be between 0 and +1. On the other hand, if
is between 0 and –1, it means a wrong detection.
In
Table 2 the results for a direct communication for transducers at 1 m distance, facing each other, so at 0 degrees, are presented. A detection time of about 0.63 ms is obtained. The Relatives Amplitudes
obtained after the cross-correlation and the assigned bit are also presented, showing that the information could easily be extracted. In this sense the
is correct for each bit position, oscillating between 0.78 and 0.86, so close to +1.
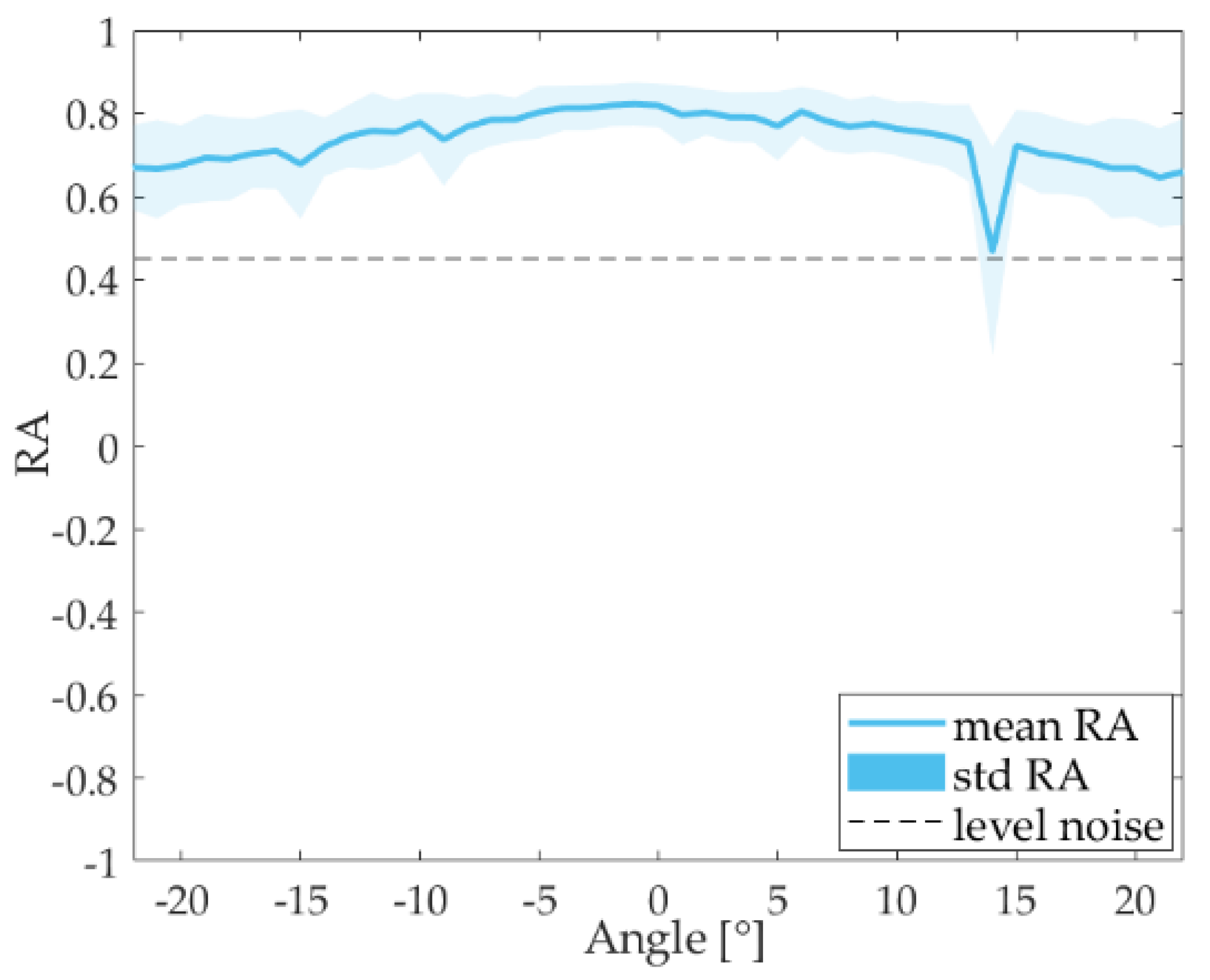
In
Figure 5, the
RA parameter averaged for all bit positions is presented as a function of the directivity angle of the emitter. We can observe that for this case all
RA values are above the noise level region, which is between ±0.45, so the detection is produced for all angles (± 25°).
4.2. Parametric Studies
To confirm the non-linear parametric effect and see the applicability of this technique for communication purposes, three different studies have been performed:
Attenuation—as a function of distance.
Voltage variation—as a function of the primary beam intensity.
Directivity—as a function of the angle of emission.
The first study analyzes the secondary beam generation in the medium by changing the distance between the emitter and the receiver. The second one aims to compare the amplitudes of the primary and secondary beams by emitting the signal at low intensity (that is, low feeding voltage) and increasing it to demonstrate the non-linear effect. The third study compares the directivity pattern of both beams.
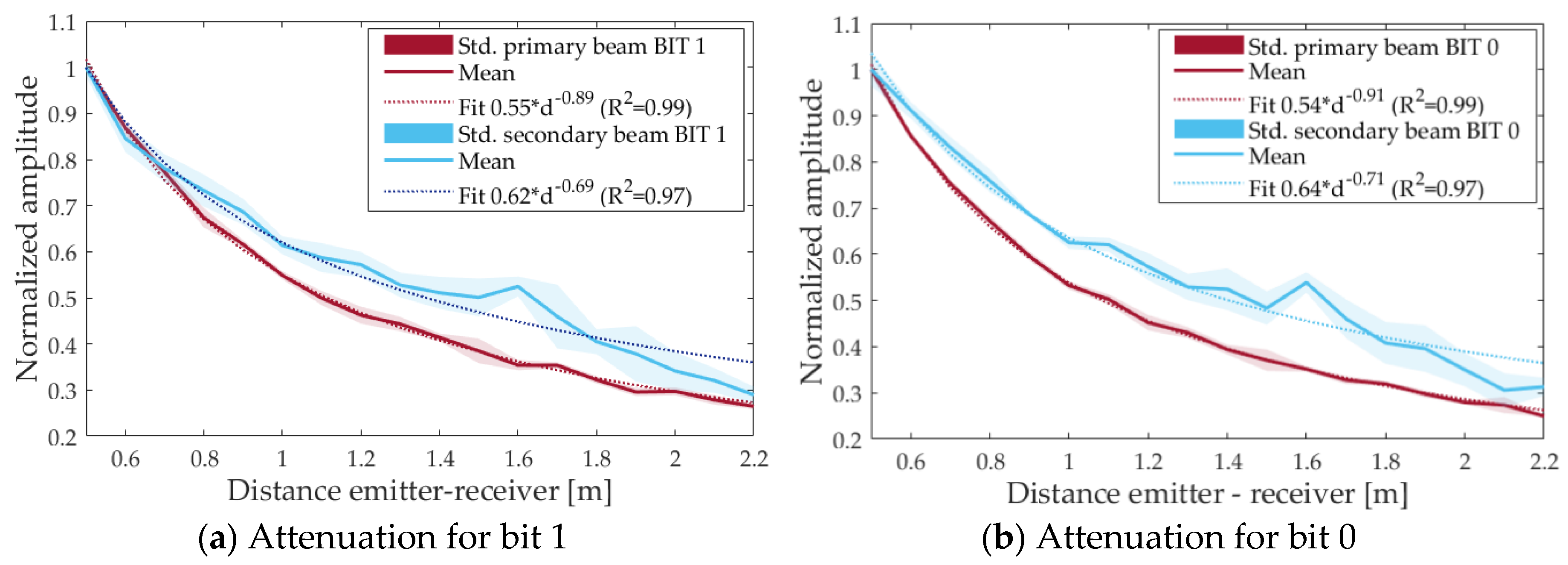
Figure 6 shows the results varying the distance,
, between the emitter and the receiver from 0.50 to 2.2 m, in steps of 0.10 m. The measurements of both, primary and secondary beams, are adjusted to a function
. Neglecting the absorption, for a spherical propagation beam, a value of
= 1 is expected. The value for the primary beam is 0.89, so close to 1, however the value for the secondary beam is much smaller, 0.69, and this can be understood as a hint of the parametric generation of the beam in the medium, and therefore there is less attenuation.
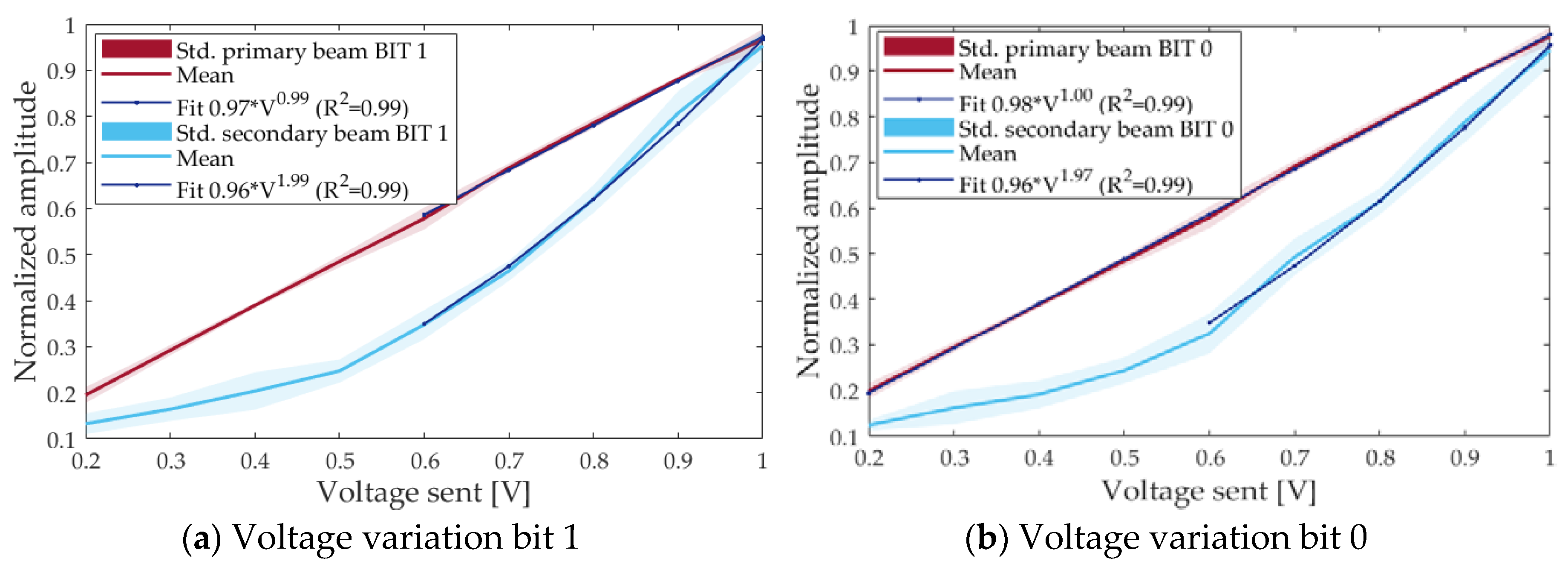
The dependence with respect to the intensity of the primary beam was done by setting the amplitude in the waveform signal generator from 200 mV to 1 V in steps of 100 mV, and studying the received amplitude. As shown in
Figure 7, a fit with the function
was made with data from 600 mV to 1 V. An exponent of 0.99 (linear behavior) is obtained for the primary beam whereas an exponent of 1.98 (square behavior) is obtained for the secondary beam, so agreeing perfectly to the theory of parametric emission.
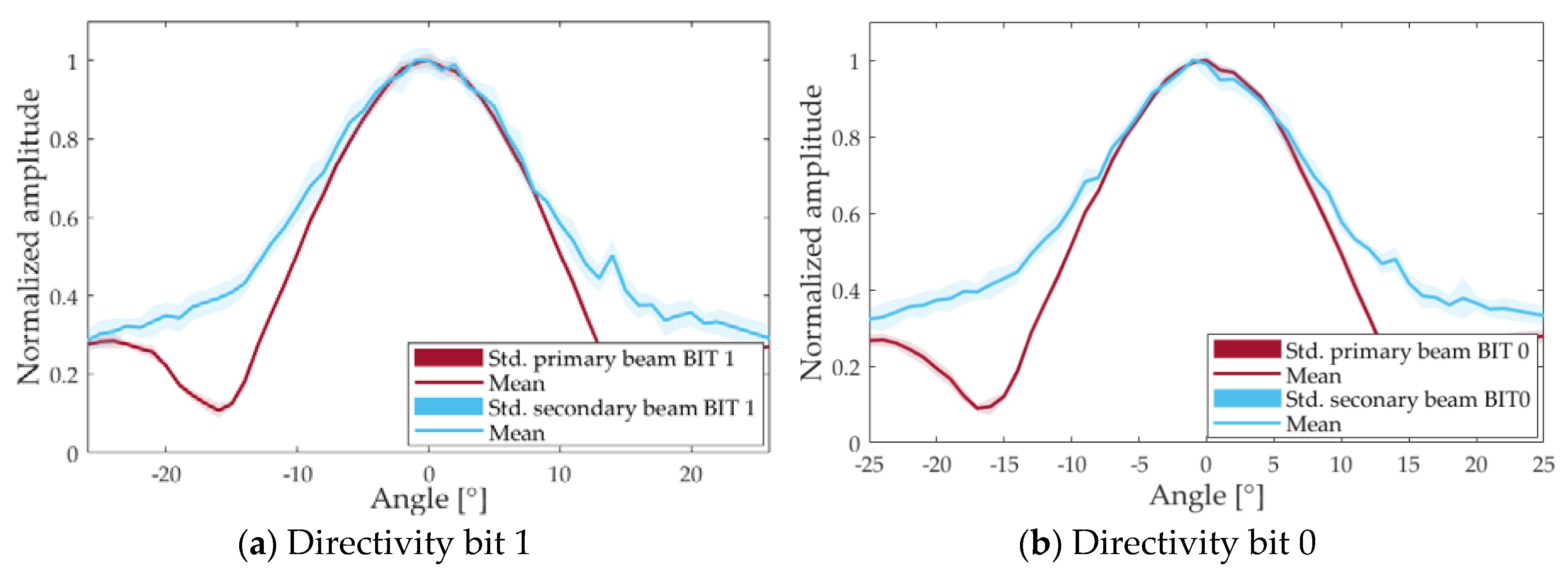
The evidence of the parametric effect of the secondary beam is also clearly shown in the directivity study, the results of which are presented in
Figure 8. An open angle of ±12° is obtained for the secondary beam, whereas for the primary beam, it is ±10°. So, both beams present a quite similar directivity pattern despite the big differences in the frequency content.
Summarizing, all these effects agree that the signal has been generated parametrically and thus, this technique could be used for underwater acoustic communications in circumstances where highly directive beams are preferable.
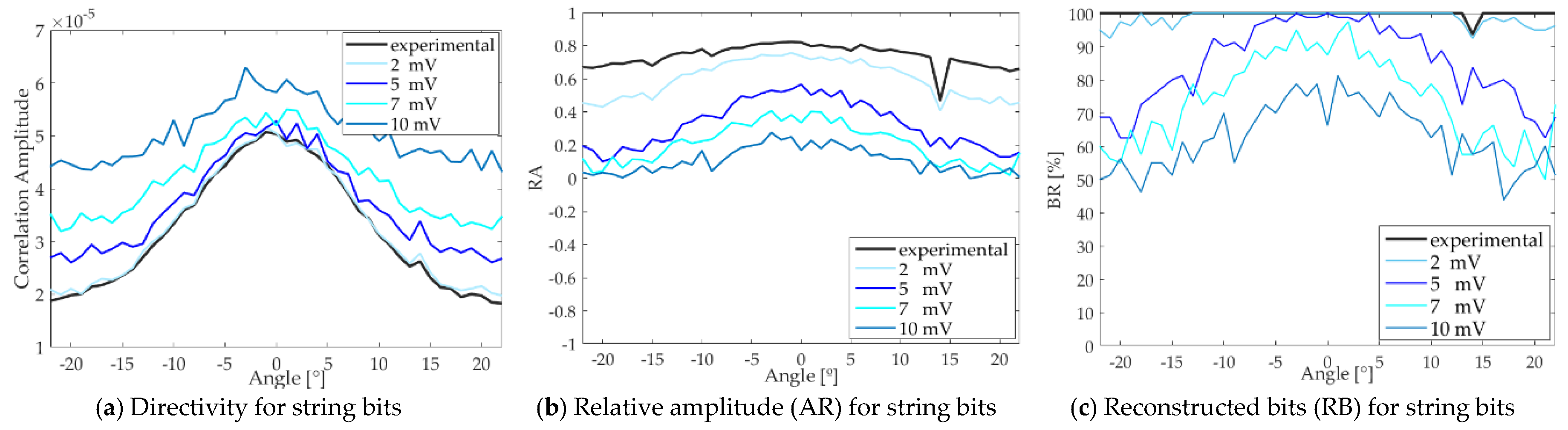
4.3. Influence of Noise
In this section, we study the influence of the noise on the communication using the parametric technique. To this end, a study is carried out that consists of adding to the received signals a white noise with different amplitude values ranging from 1 to 10 mV. Then, the correlation process described in
Section 4.1 is performed and the parameters
RA and
RB, Reconstructed bits, are analyzed.
We can see in
Figure 9 that by increasing the amplitude of the white noise the directivity is degraded (a), the
RA parameter decreases (b) and, so the bit detection rate also does (c). Therefore, the signal is sensitive to changes in amplitude of noise and
RB is quite dependent of the angle. For example, with 5 mV white noise
RB is larger than 90% in the region ±10°, whereas it degrades quite fast outside this region. This could be applied for situation in which directive communication is required. The noise could either be environmental or easily produced artificially with a non-directive transducer working at low frequencies.
4.4. Amplitude Ratio Between the Secondary and Primary Beams
In this section we compare the amplitude ratio between the secondary beam and the primary beam
obtained experimentally with a theoretical model referenced in [
2].
A 0.28% direct ratio has been measured for the pressure amplitude of both beams, 12,940 Pa for the primary beam and 36.8 Pa for the secondary one.
With respect to the theoretical predictions, using the first approach, the equation of the complex parametric gain
G (dB) is used, which is defined as a value whose magnitude is the ratio between the primary and secondary beam pressures [
2], where.
and in decibels:
where
is the observer’s radial coordinate,
secondary beam pressure at a point
r centered on the emitter (Pa),
is the Rayleigh length (m),
the peak face pressure amplitude of the primary component (Pa) at the Rayleigh distance.
According to the specifications of the emitters and the calibrations done, for our case we have
and
, thus obtaining an amplitude ratio between the secondary beam and the primary beam of 0.28%, so fully agreeing with the measurements. This gain
corresponds to a value of
dB rms source level of the primary component and
dB (0.0012 dB).
According to the parametric-gain curves, Figure 2 of Ref. [
2], we effectively find values close to
for
and
in the shown curves.
Moreover, by applying Equation (1), the measured sweep is studied with a set of parametric sine waves at the limit frequencies and a centered one; that is, 4 kHz, 20 kHz and 40 kHz frequencies are chosen. The ratios between the secondary beam and the primary beam obtained are 0.141‰, 0.35% and 1.41%, respectively, with a primary beam pressure of 12,940 Pa. As expected, the closest ratio to the experimental one is the one for 20 kHz sine wave, which is about the average frequency of the parametric sweep emitted.
Finally, the measurement is also contrasted according to the operating regime for parametric sources. Following ref. [
2], our case is in the regime of absorption limiting in the far spherical zone:
where
is the absorption,
Rayleigh length,
(Hz) carrier frequency and
difference frequency 4, 20 and 40 kHz. Applying the Equation (16) for
we obtain 0.014, 0.0028 and 0.0014, respectively, and for
0.006, so all values are much smaller than one.
Subsequently, the parameter
is calculated through the following equation:
where
is the exponential integral function. We obtain 0.0002 for 4 kHz, 0.0015 for 20 kHz and 0.0035 for 40 kHz and applying Equation (14) we have −73.36 dB −56.27 dB and −49.18 dB, respectively, validating that for the emitted frequency of 20 kHz the value of
G = −56.27 dB is similar to the first analysis studying the pressure received from the primary and secondary beams with
G = −51 dB.


 ,
, 











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}