Temperature Compensation of Elasto-Magneto-Electric (EME) Sensors in Cable Force Monitoring Using BP Neural Network


Abstract
:1. Introduction
2. Response of EME Sensors under Different Temperature and Force Conditions
3. Temperature Compensation by Polynomial Fitting Method
4. Temperature Compensation by BP Neural Network
4.1. BP Neural Network Model
4.2. Training of BP Neural Network
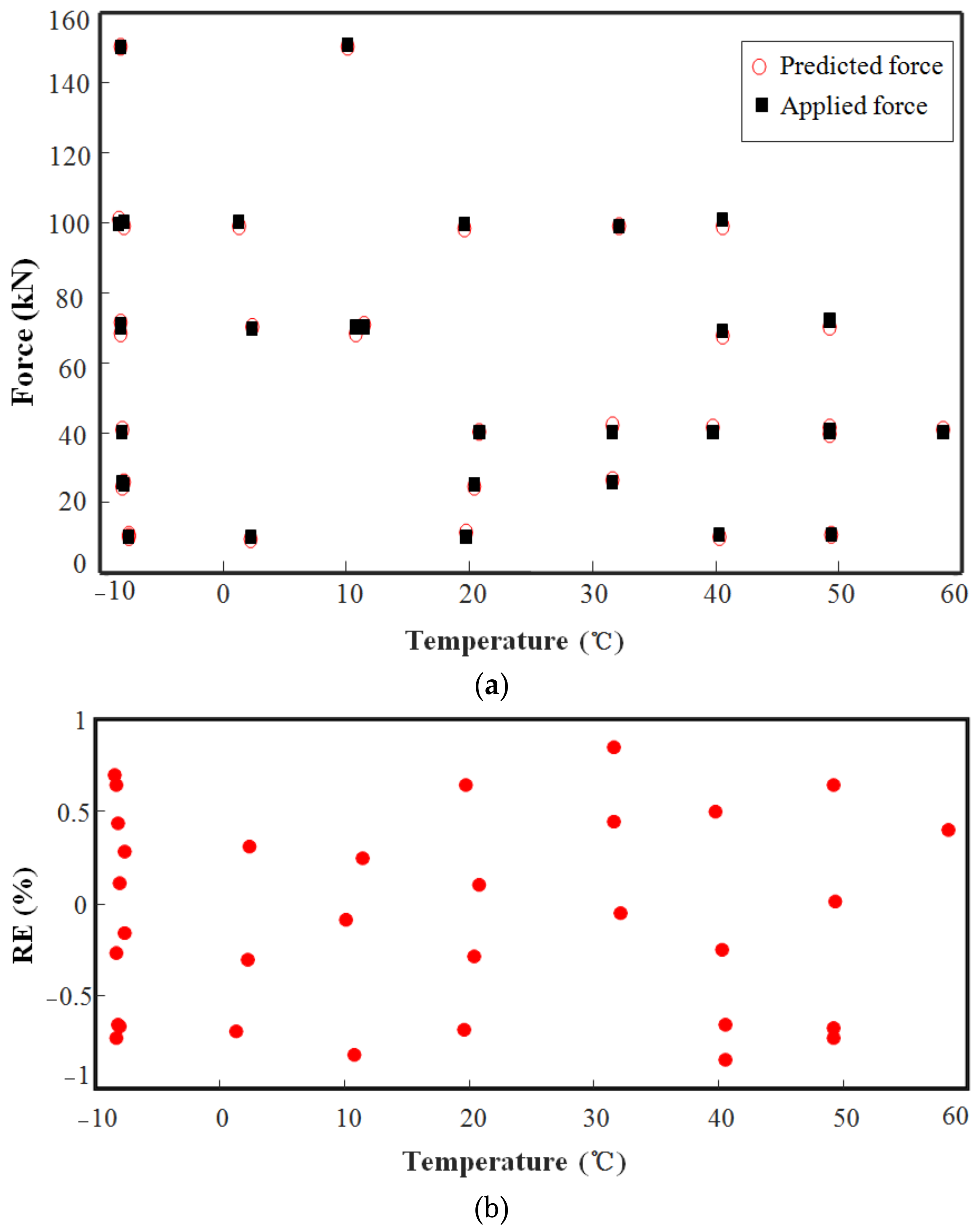
4.3. Compensation Results
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Deng, Y.; Liu, Y.; Chen, S. Long-term in-service monitoring and performance assessment of the main cables of long-span suspension bridges. Sensors 2017, 17, 1414. [Google Scholar] [CrossRef] [PubMed]
- Holzleitner, F.; Kastner, M.; Stampfer, K.; Höller, N.; Kanzian, C. Monitoring cable tensile forces of winch-assist harvester and forwarder operations in steep terrain. Forests 2018, 9, 1–13. [Google Scholar] [CrossRef]
- Sumitro, S.; Kurokawa, S.; Shimano, K.; Wang, M.L. Monitoring based maintenance utilizing actual stress sensory technology. Smart Mater. Struct. 2005, 14, S68–S78. [Google Scholar] [CrossRef]
- Tang, D.D.; Huang, S.L.; Chen, W.M.; Jiang, J.S. Study of a steel strand tension sensor with difference single bypass excitation structure based on the magneto-elastic effect. Smart Mater. Struct. 2008, 17, 025019. [Google Scholar] [CrossRef]
- Yim, J.S.; Shin, S.W.; Eem, S.H.; Wang, M.L.; Shin, S.W.; Yun, C.B.; Jung, H.J.; Kim, J.T. Field application of elasto-magnetic stress sensors for monitoring of cable tension force in cable-stayed bridges. Smart Struct. Syst. 2013, 12, 465–482. [Google Scholar] [CrossRef]
- Duan, Y.F.; Zhang, R.; Zhao, Y.; Wing Or, S.; Fan, K.Q.; Tang, Z.F. Steel stress monitoring sensors based on elasto-magnetic effect and using magneto-electric laminated composites. J. Appl. Phys. 2012, 111, 07E516. [Google Scholar] [CrossRef] [Green Version]
- Zhang, R.; Duan, Y.F.; Wing Or, S.; Zhao, Y. Smart elasto-magneto-electric (EME) sensors for stress monitoring of steel cables: Design theory and experimental validation. Sensors 2014, 14, 13644–13660. [Google Scholar] [CrossRef] [PubMed]
- Duan, Y.F.; Zhang, R.; Dong, C.Z.; Luo, Y.Z.; Wing Or, S.; Zhao, Y.; Fan, K.Q. Elasto-magneto-electric (EME) sensor for in-service cable force monitoring on the second Jiaojiang cable-stayed bridge. Int. J. Struct. Stab. Dyn. 2016, 16, 1640016. [Google Scholar] [CrossRef]
- Lloyd, G.M.; Singh, V.; Wang, M.L. Experimental evaluation of differential thermal errors in magnetoelastic stress sensors for Re < 180. Sensors 2002, 2, 810–817. [Google Scholar] [CrossRef]
- Cappello, C.; Zonta, D.; Laasri, H.A.; Glisic, B.; Wang, M.L. Calibration of elasto-magnetic sensors on in-service cable-stayed bridges for stress monitoring. Sensors 2018, 18, 466. [Google Scholar] [CrossRef] [PubMed]
- Tang, D.D.; Zhu, H.J.; Mou, J.L.; Wu, M.F. Research on the temperature influence and compensation technique in a magneto-elastic cable tension sensor. Int. J. Sens. Netw. 2014, 16, 236–243. [Google Scholar] [CrossRef]
- Patra, J.C.; Chakraborty, G.; Meher, P.K. Neural-network-based robust linearization and compensation technique for sensors under nonlinear environmental influences. IEEE Trans. Circuits I 2008, 55, 1316–1327. [Google Scholar] [CrossRef]
- Quan, G.Z.; Pan, J.; Wang, X. Prediction of the hot compressive deformation behavior for superalloy nimonic 80A by BP-ANN model. Appl. Sci. 2016, 6, 66. [Google Scholar] [CrossRef]
- Jia, Z.; Ren, L.; Li, H.N.; Sun, W. Pipeline leak localization based on FBG hoop strain sensors combined with BP neural network. Appl. Sci. 2018, 8, 146. [Google Scholar] [CrossRef]
- Lloyd, G.M.; Singh, V.; Wang, M.L.; Hovorka, O. Temperature compensation and scalability of hysteretic/anhysteretic magnetic-property sensors. IEEE Sens. J. 2003, 3, 708–716. [Google Scholar] [CrossRef]
- Bozorth, R.M. Ferromagnetism; D. Van Nostrand Company, Inc.: New York, NY, USA, 1951; ISBN 0780310322. [Google Scholar]
- Duan, Y.F.; Zhang, R.; Zhao, Y.; Wing Or, S.; Fan, K.Q.; Tang, Z.F. Smart elasto-magneto-electric (EME) sensors for stress monitoring of steel structures in railway infrastructures. J. Zhejiang Univ. Sci. A 2011, 12, 895–901. [Google Scholar] [CrossRef]
- Weller, D.S.; Goyal, V.K. Jitter compensation in sampling via polynomial least squares estimation. In Proceedings of the 2009 IEEE International Conference on Acoustics, Speech and Signal Processing, Taipei, China, 19–24 April 2009; Curran Associates, Inc.: New York, NY, USA, 2009. [Google Scholar]
- Fei, Y.T. Error Theory and Data Processing, 5th ed.; China Machine Press: Beijing, China, 2010; pp. 105–115. ISBN 9787111297871. [Google Scholar]
- Han, M. Foundations of Artificial Neural Networks; Dalian University of Technology Press: Dalian, China, 2014; ISBN 9787561189337. [Google Scholar]
- Han, L.Q. Artificial Neural Networks: Theory, Design and Application, 2nd ed.; Chemical Industry Press: Beijing, China, 2007; pp. 48–52. ISBN 9787502533540. [Google Scholar]
- Graupe, D. Principles of Aartificial Neural Networks; World Scientific Publishing Co. Pte. Ltd.: Singapore, 1997; pp. 31–37. ISBN 9810225164. [Google Scholar]
- Mirvakili, S.M.; Faghihi, F.; Khalafi, H. Developing a computational tool for predicting physical parameters of a typical VVER-1000 core based on artificial neural network. Ann. Nucl. Energy 2012, 50, 82–93. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Training Algorithm | Training Function | Training Time (s) | |RE| (%) |
|---|---|---|---|
| Gradient descent BP algorithm | Traingd | 5 | 15.58 |
| Gradient descent BP with momentum algorithm | Traingdm | 3 | 52.37 |
| Gradient descent BP with adaptive learning rate algorithm | Traingda | 4 | 11.28 |
| Gradient descent BP with momentum and adaptive learning rate | Traingdx | 4 | 15.1 |
| Levenberg-Marquardt BP algorithm | Trainlm | 7 | 0.9644 |
| Resilient BP algorithm | Trainrp | 4 | 6.237 |
| Scaled conjugate gradient BP algorithm | Trainscg | 4 | 6.45 |
| Bayesian regulation BP algorithm | Trainbr | 7 | 0.9583 |
| BFGS quasi-Newton BP algorithm | Trainbfg | 6 | 7.093 |
| Cyclic sequential incremental BP algorithm | Trainc | 178 | 6.008 |
| Transfer Function of Hidden Layer | Transfer Function of Output Layer | Training Time (s) | |RE| (%) |
|---|---|---|---|
| Logsig | Tansig | 4 | 3.756 |
| Logsig | Purelin | 4 | 1.048 |
| Logsig | Logsig | 2 | 39.11 |
| Tansig | Tansig | 6 | 2.471 |
| Tansig | Purelin | 7 | 0.9644 |
| Tansig | Logsig | 2 | 39.11 |
| Purelin | Tansig | 2 | 7.474 |
| Purelin | Purelin | 2 | 4.571 |
| Purelin | Logsig | 4 | 39.11 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, R.; Duan, Y.; Zhao, Y.; He, X. Temperature Compensation of Elasto-Magneto-Electric (EME) Sensors in Cable Force Monitoring Using BP Neural Network. Sensors 2018, 18, 2176. https://doi.org/10.3390/s18072176
Zhang R, Duan Y, Zhao Y, He X. Temperature Compensation of Elasto-Magneto-Electric (EME) Sensors in Cable Force Monitoring Using BP Neural Network. Sensors. 2018; 18(7):2176. https://doi.org/10.3390/s18072176
Chicago/Turabian StyleZhang, Ru, Yuanfeng Duan, Yang Zhao, and Xuan He. 2018. "Temperature Compensation of Elasto-Magneto-Electric (EME) Sensors in Cable Force Monitoring Using BP Neural Network" Sensors 18, no. 7: 2176. https://doi.org/10.3390/s18072176
APA StyleZhang, R., Duan, Y., Zhao, Y., & He, X. (2018). Temperature Compensation of Elasto-Magneto-Electric (EME) Sensors in Cable Force Monitoring Using BP Neural Network. Sensors, 18(7), 2176. https://doi.org/10.3390/s18072176