This section provides a thorough description of all the particulars considered for the adopted control approach. First,
Section 3.1 is devoted to the introduction of all the concepts concerning reset control, which is required to understand the development of the control solution proposed for the maneuver at issue. Next,
Section 3.2 presents the design requirements considered in order for the end system to operate comfortably. One of these design objectives that involves limiting jerk and acceleration required the vehicle model to be transformed into a double integrator plant by means of a prefilter. Assuming a prefect prefiltering,
Section 3.3 focuses on how the base linear controller was obtained and the different reset techniques studied.
Section 3.4 covers those details concerning the design of the linear-quadratic regulator as well as the CNF controller for the maneuver under discussion. Finally, in
Section 3.5, the outcome of all the controllers is presented and compared.
3.1. Reset Control
As mentioned previously, the objective of this work is to explore the potential of reset control for a lane change maneuver. This kind of controller behaves like a linear compensator until the reset action takes place. The reset condition (the event that triggers the reset action) is usually the zero-crossing of the controller input, even though other choices are possible. The linear controller to which the reset mechanism is applied is known as
base linear controller (BLC):
Equation (
8) defines a reset controller with an input
and an output
, where x(t)
is the state vector,
,
,
and
are the system matrices and
is a diagonal matrix whose values vary depending on whether a
full or
partial reset is applied. In a
full reset controller, all of its states are affected by the reset action, whereas, in a
partial reset compensator, only a subset of them are affected. A variable known as
reset percentage and denoted as
is used to adjust the magnitude of the reset action so, for a
full reset controller,
is a matrix with
in all its diagonal elements. On the other hand, for a
partial reset compensator,
has as many diagonal elements equal to
as there are reset states, having ones in all the diagonal remaining elements. Hereinafter, when the term
full reset is employed to designate a controller, it will refer to a compensator whose states are fully reset, that is to say, with a
equal to one, regardless of the number of states affected by the reset mechanism.
The first line in Equation (
8) describes the continuous dynamics known as
flow mode. The second one defines the discrete or impulsive dynamics, known as
jump mode, due to the fact that, whenever the error crosses zero (
), the controller state jumps from
to
.
As previously mentioned, typically, the condition which triggers the reset mechanism is the zero-crossing of the controller input, and, while it is true that this type of compensator can outperform a well-tuned linear controller, frequently, in control practice, the compensator implementation is done by using a reset band. The use of a reset band may yield better results in terms of stability and performance as noted in [
25] for systems with time-delays. Chapter 5 of monograph [
28] contains a complete and detailed justification of how a reset band can contribute to enhancing reset control systems.
A general description of a reset control system with a reset band is given by the following impulsive differential equation:
where the reset surface
is given by
,
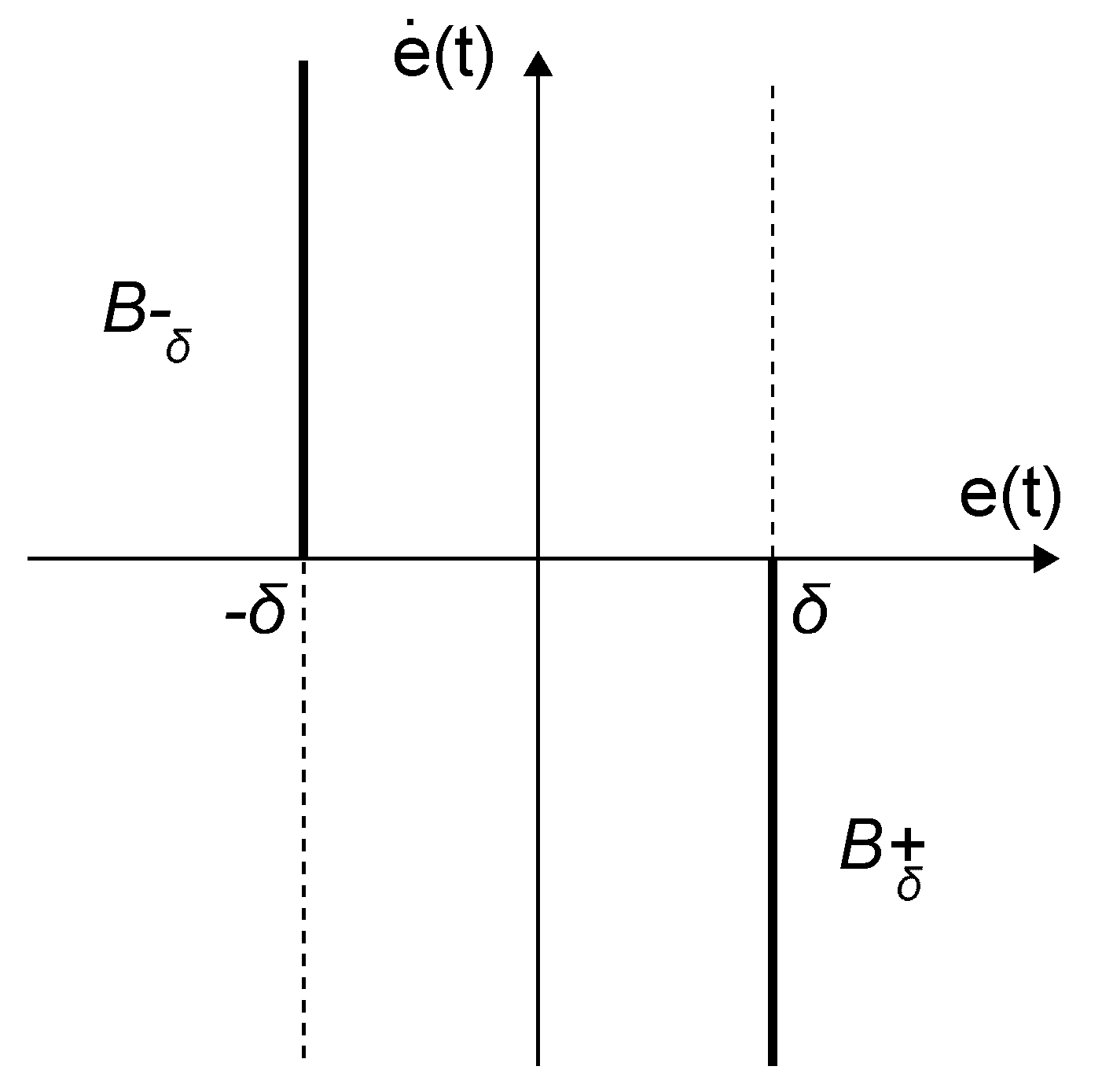
being some non-negative real number. In this way, the controller states are reset every time its input enters the reset band. Normally, the reset band surface will consist of two reset lines
and
, as show in
Figure 10. A standard reset compensator is obtained if
.
A variable reset band implies that, at every reset instant, the band value may not be the same. In general, the band value is calculated by a combination of the error and its derivative as seen in the following equation:
where
h is a parameter that can be selected at will by the designer. This reset condition leads to the following state-space arrangement of Equation (
11):
where the variable reset band surface
is given by
. The reset surface is a continuous function of the error signal, as it can be seen in
Figure 11. If
, a standard compensator with reset action triggered by a zero-crossing is obtained.
3.2. Design Requirements
Ride quality or ride comfort refers to the feeling that passengers get while the car is moving. Acceleration and its time derivative, jerk, affect ride quality in a prominent manner so that high values of acceleration or jerk can cause discomfort even during short periods of time. For that reason, setting restrictions on magnitude of acceleration and jerk is strictly necessary to guarantee comfort to the vehicle occupants. Limit values vary between different studies, but they fall within the same range. According to [
36], the vehicle acceleration must be limited to a maximum value of 2 m/s
and the jerk to 0.9 m/s
, both in absolute value.
Due to the aforementioned restrictions, the reset instants must be carefully overseen in order not to surpass the limits of acceleration and jerk since, at those particular moments, the jumps in the controller states are critical and may lead to a poor ride quality resulting in discomfort for the passengers. For that reason, during the controller design, a method was conceived to directly restrict the value of jerk every time a reset action occurs. Firstly, for this method to work, it was necessary to convert the dynamic model into a double integrator. On account of this, a prefilter has to be employed for a pole-zero cancellation. It must be noted that, by confining the jerk magnitude to finite values, the resulting acceleration will also be bounded.
The parametric uncertainty that there exists in every vehicle, due to the wide variety of different situations they encounter, makes the use of a single prefilter unfeasible for every possible situation. The way through which the parametric variation affects the model was studied to help to devise the best alternative for prefiltering the plant. Every possible variation of the model parameters was considered to be restricted to the values in
Table 2. In order for the vehicle to be fully operational, for any given longitudinal velocity, a prefilter would have to be obtained and included in a lookup table. To reduce the size of this table, instead of having to calculate a prefilter for one particular velocity, each and every one of them will be calculated to be operational for a small interval of velocities ranging 1 m/s. Therefore, if the vehicle accelerates while changing lanes and exceeds its range of operation, the prefilter will be replaced by the most convenient one in terms of velocity. In any case, to exemplify the method, the main lane change maneuver that is considered in
Section 4 was chosen to operate at 25 m/s. The longitudinal velocity of the vehicle is considered to be kept constant during the maneuver by a different control loop whose study is out of the scope of this paper.
A random parametric sweep, using the values from
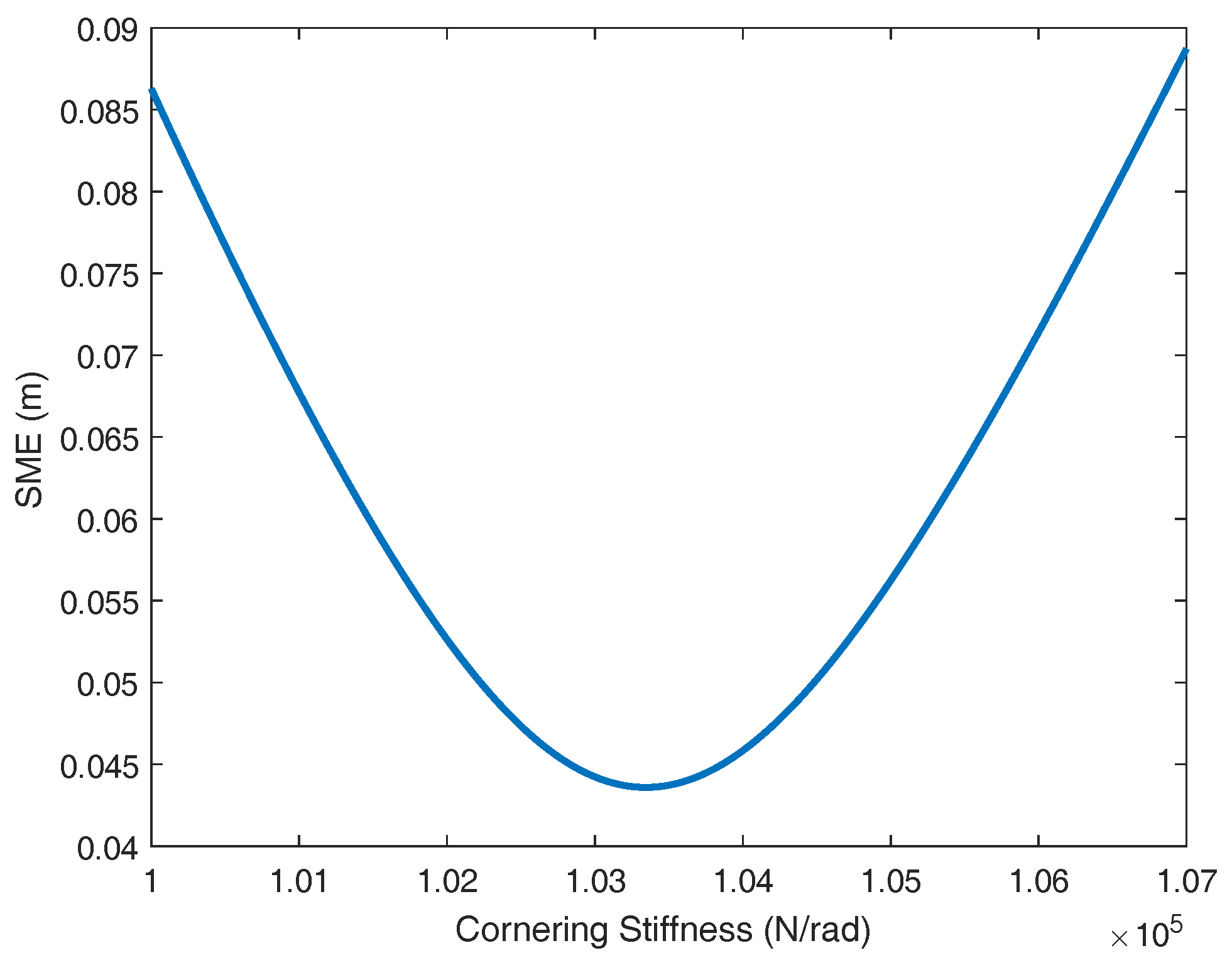
Table 2, was performed to obtain a realistic set of vehicle plants that could be used to obtain a fine prefilter. Since a pole/zero is deemed to be adequately canceled if the zero/pole employed for its elimination is located within a circle with a radius equivalent to the 20% of the total distance existent from the origin of coordinates to the zero/pole, the best way to ensure a good cancellation of all the possible plants is to place the zero/poles of the prefilter at a point equivalent to the arithmetic mean of the cloud of points obtained by the parametric sweep. The gain of the prefilter is obtained through the same way, its value being the inverse of the arithmetic mean of all the different plant gains. As an example,
Figure 12 has a depiction of the zero-pole positions (black dots) and the surrounding areas of cancellation for a randomly generated parametric sweep for a longitudinal velocity ranging from
to
m/s.
Even though it is true that the core of the validation section is focused on a lane change at a constant velocity, in order to demonstrate the feasibility of the method for a speed changing maneuver, more prefilters are fixed. These are included in
Table 3.
Using the final base linear controller, with the following realization
and whose design is explained in
Section 3.3, the randomly generated plants, prefiltered by using the arithmetic mean of the scattered clouds of zero-poles and gains of the plant, are compared to the system resulting from combining the controller with a double integrator. In this way, the effectiveness of the prefilter can be graphically confirmed in terms of the output of the system, the lateral position of the vehicle. After inspecting the outcome presented in
Figure 13, it can be concluded that assuming a zero-pole cancellation for a particular velocity is convenient.
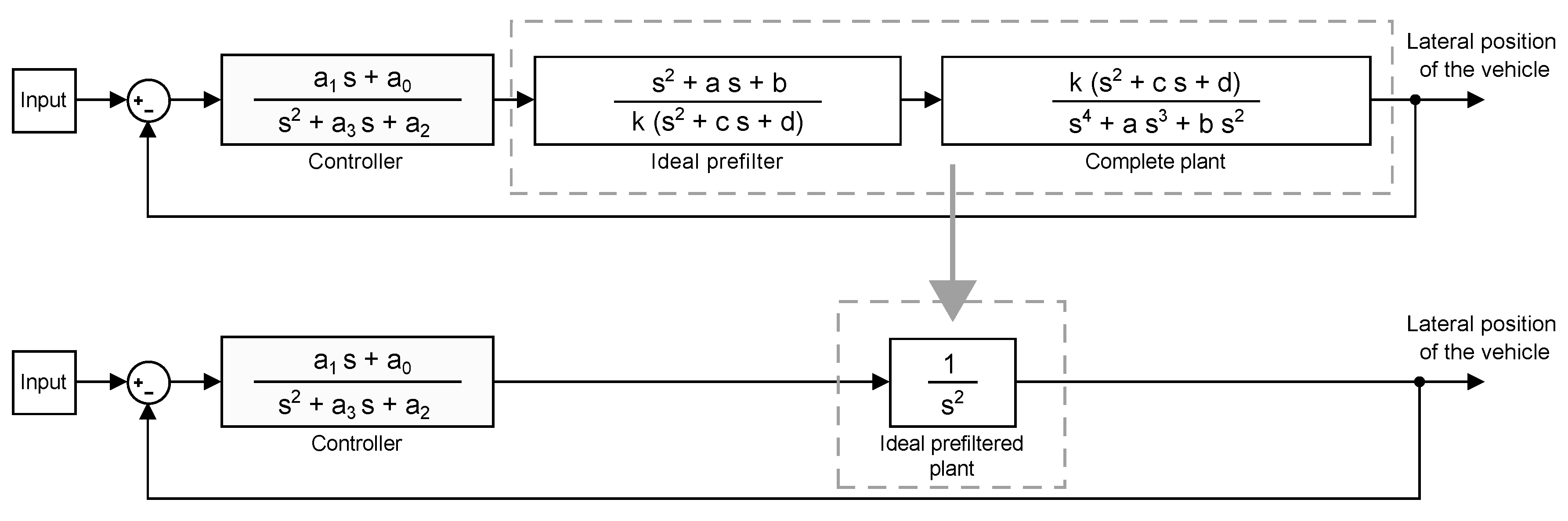
Figure 14 depicts the equivalent system of a perfect zero-pole cancellation.
As stated before, by using a double integrator, it is possible to limit the jerk at the reset instants. This is achieved by conveniently reorganizing the states of the resultant system, which consists of a controller and a double integrator. The new distribution of the system states allows for the reset action to be directly applied to the jerk state in order not to exceed the comfort boundary. This new arrangement of the system will be hereinafter referred to as canonical form. Equation (
12) shows its state-space representation and it is equivalent to
. As it can be seen, the system has been changed to one whose states are the lateral position and its time derivatives (
,
,
and
):
The fact needs to be taken into consideration that, in order for the canonical form to be equivalent to the system in
Figure 14, the initial condition of the reset integrator has to be adapted to obtain a response equal to that of the original system.
Figure 15 shows a representation of the canonical form where it can be appreciated that the reset action is directly applied to the jerk state, as reported above.
The comfort limit imposes the maximum variation of the reset state in order to not impoverish ride quality. If after resetting the state,
exceeds the maximum allowed jerk,
will be limited as indicated in Equation (
13). As far as acceleration is concerned, although it is not directly limited, by obtaining a good base linear controller, with a sufficiently smooth response, the vehicle will operate far from the comfort boundaries. Therefore, whenever a reset action occurs, only jerk but not acceleration will be at risk of exceeding the comfort limits. Likewise, yaw rate is not directly limited due to the fact that the imposed comfort requirements combined with limitations on rise time, settling time and overshoot will confine the values of this magnitude in a safe range of operation. The results in the following sections confirm that this approach gives rise in practice to acceptable ranges of acceleration and yaw rate:
Other design requirements are overshoot, rise time, settling time and disturbance rejection. Lateral position is allowed to reach a maximum equal to the width lane ( m) plus an extra m that accounts for an overshoot of %. Settling time () and rise time have been limited to 40 s and 5 s. The rise time requirement is imposed indirectly by the restrictive acceleration and jerk requirements. It must be noted that both acceleration and jerk requirements tend to make the system slower, whereas the rise time limitation imposes a limit in order for the system not to be too slow. By getting to a compromise between them, the system is fast enough without producing discomfort. is restricted to a maximum of m/N all along the frequency domain. Although the controller designed is not intended to work as a lane keeping compensator, guaranteeing a certain degree of disturbance rejection was deemed necessary.
3.3. Design of the Reset Controllers
Due to the fact that there are several restrictive design requirements that have to be met, the base linear controller is obtained by means of a genetic algorithm. This is a method for solving optimization problems based on a natural selection process that imitates biological evolution. The ideas involved in them were originally developed by Holland [
37].
In general, a typical genetic algorithm may comprise the following elements [
38]:
a population of guesses of the solution to the problem,
a way of assessing how good or bad the individual solutions within the population are,
a method for mixing fragments of the better solutions in order to form, on average, better solutions, and
a mutator operator is employed for the genetic algorithm not to result in a permanent loss of diversity within the solutions.
In the case at issue, each member of the population consists of four parameters or genes which are the coefficients of the controller (
,
,
and
) as in Equation (
14). This controller structure was chosen since it is the simplest realization to which a reset mechanism could be applied without directly resetting the actuation signal, which would produce jumps in the acceleration and, as a result, extreme jerk. For that reason, a second pole was added to the minimum resettable realization:
In this way, each individual represents a controller. In order to determine the suitability of each one, a fitness function is employed. This expression combines performance information of the system formed by combining each individual controller with the double integrator plant. Acceleration, jerk, overshoot, settling time, rise time and disturbance rejection are included in the fitness function. Each one of them is normalized and then weighted as it is reflected in the following equation:
where
is the maximum magnitude of lateral acceleration,
is the maximum magnitude of lateral jerk,
overshoot,
rise time,
settling time and
the maximum gain of the referred transfer function.
is the weight of each variable, all of them are calculated assuming a perfect pole-zero cancellation so the double integrator plant is used in the genetic algorithm. Therefore, the base linear controller only have to be computed once and it can be used for other velocities due to the homogenizing effect of the prefilter. To compute
,
in Equation (
7) is calculated for the vehicle without any additional load and traveling at 25 m/s.
The implementation is done by using Matlab Optimization Toolbox and consists of the following steps:
A populations of size 50 is randomly initialized within the lower and upper bounds of , , and .
Each member of the current population is scored by computing its fitness value from Equation (
15).
Five percent of the individuals with the lowest fitness are chosen as elite and directly pass to the next generation. These are known as elite children.
Eighty percent of the remaining 95% of the descendant generation is obtained by combining the genes of a pair of parents. These are known as crossover children.
The rest of the specimens to complete the new generation are created by introducing random changes, or mutations, to a single parent. These are known as mutation children.
In each iteration, a different individual of the population is simulated and the parameters of , and are obtained. At the same time, the acceleration and jerk values are calculated as well as the disturbance rejection of the system. Next, all the values are introduced in the fitness function to evaluate the candidate. The computational cost of each iteration obtained has an average of 150 ms and the stopping criterion selected is the function tolerance, whereby the value of fitness function decreases less than . In addition, the maximum number of iterations is set to 100 × number of variable = 400.
A base linear controller does not present the best attainable features for a lineal controller, nor is it conceived to have them.
and
are assigned a fewer weight (
and
) in the fitting function since there is room for the reset action to correct the maneuver performance back to operational range. Equation (
16) contains the base linear controller found by the genetic algorithm. The system formed by this regulator and the double integrator plant have an overall response that adjusts to the comfort limits, rise time and disturbance rejection. By contrast,
and
maximum allowed thresholds are exceeded:
To conclude whether the usage of reset control is convenient and advantageous over using linear regulation, a comparison must be established under fair conditions. This means that the reset controller must be compared with a linear one presenting good design characteristics. The problem is that finding a favorable linear regulator is not feasible because disturbance rejection imposes a maximum on slowness of the system, which is counterproductive for OS, acceleration and jerk. Therefore, getting a linear controller in compliance with all the design requirements is not possible since Equation (
17) [
39] holds for any linear controller similar in form as the one described in Equation (
14) in a closed-loop with a double integrator plant, which fit the disturbance rejection specification. As a consequence, if the system conformed by the controller and the double integrator plant presents a positive or negative error, it will have to compensate for it by changing the error sign to reduce the cumulative term.
Figure 16 shows graphically the implications of that limitation. Area
is positive; thus, a second area with the opposite sign is required at least to decrease
. Since
is bigger than
, the error switches signs once again. These fluctuations continue until
. Since a reset system is not restricted by Equation (
17) it can exhibit a time response as the one represented in
Figure 17 where the sum of the areas is greater than zero:
In addition to the previous limitation on the time domain, there are also restrictions on the frequency domain. Particularly, a linear system with a relative degree of its open-loop transfer function equal to or greater than two and none of its poles in the right-half plane, as it is the case for a double integrator plant, is subject to the following expression known as
Bode’s Integral Formula [
40]:
where
is the sensitivity function. This equation shows that, if sensitivity is suppressed at some frequency range, it is increased at some other range. This is known as the
waterbed effect.
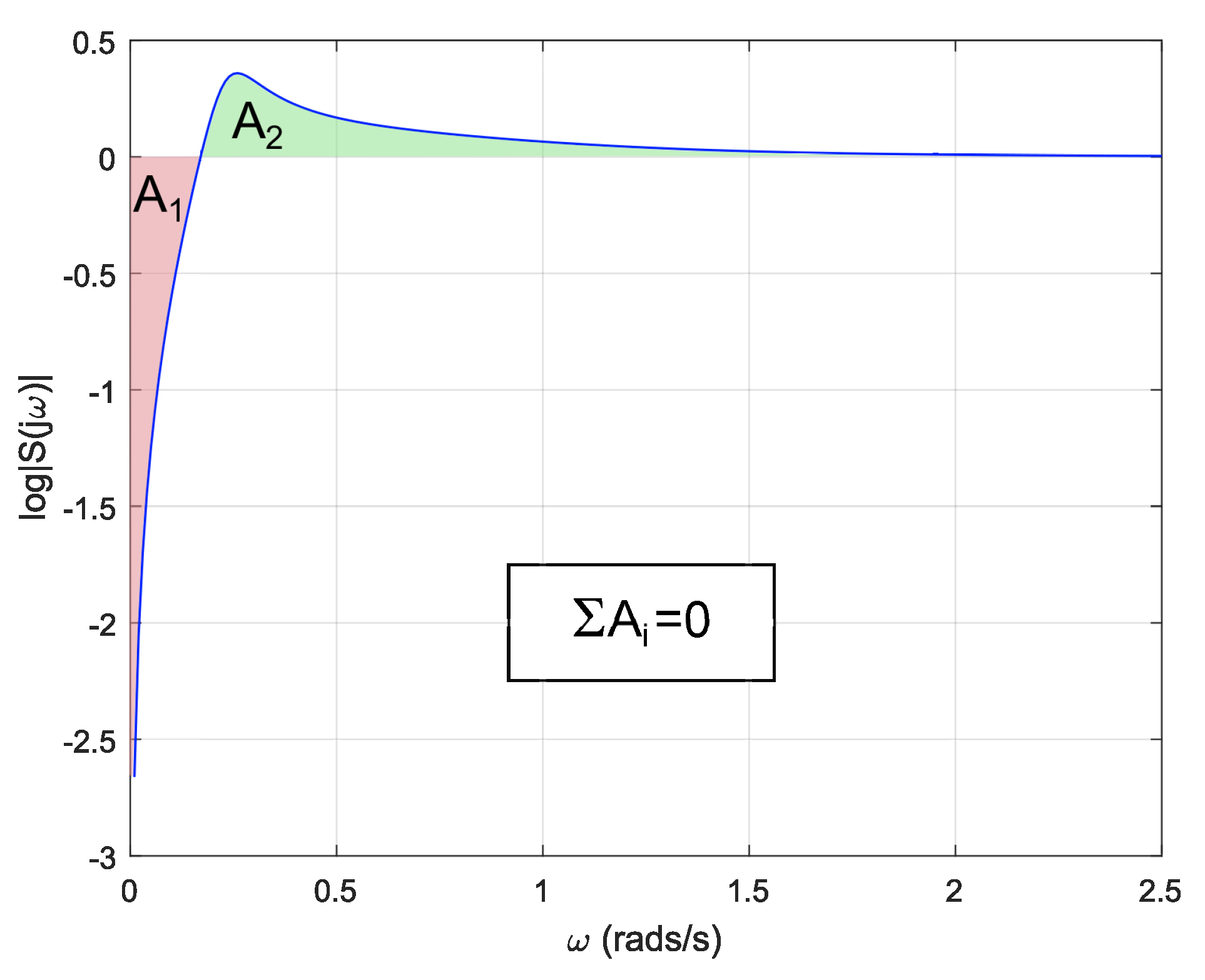
Figure 18 shows a representation of the sensitivity function for different frequencies. As it can be seen, both colored areas must be equal to satisfy Equation (
18). It must be noted that the upper area will equalize the lower one when
w tend to infinity.
Figure 19 shows the sensitivity function of a reset system. As it can be seen, the reset system is not restricted by Equation (
18).
Since it is not possible to obtain a linear regulator that satisfies all the design criteria, all that can be expected is to fit the requirements separately. For instance, a controller with the following coefficients , , and produces a response with adequate values of jerk, acceleration, OS, , but slow dynamics, leading to a poor robustness against disturbances. Due to the slow dynamics imposed by the controller, the system takes a large amount of time to take to zero.
In contrast to a linear regulator, a system endowed with a reset mechanism is not subjected to the fundamental linear limitations. In a reset controller, it is possible to adjust the reset percentage and strategy to yield a lane change meeting all the design specifications. Three different reset strategies are compared, which are zero-crossing of the reset action, fixed-reset band and variable reset band. As far as reset percentage is concerned, full reset (
) is compared to an error-minimization method introduced in [
27]. At every reset instant, the optimal
in terms of ISE minimization is calculated, which is, in turn, based on
-norm minimization. For a function
E∈
(s), the
-norm is defined as
Considering that, at any reset instant, the error is given by
where
, it can be concluded that its
-norm is
where
L is the observability Gramian matrix, which is obtained from the following Lyapunov equation
The previous Lyapunov equation has a unique solution if the eigenvalues
of
and
of
A satisfy that
for all pairs
. If that condition is violated, there is not solution to the equation or it is not unique. For that reason, the system cannot use a non-autonomous realization to calculate the optimal
for a step input since the resulting
A matrix would have one pole at the origin caused by the step input. Consequently, an autonomous realization of the system is required. By adapting the canonical form described in Equation (
12) and
Figure 15, an autonomous equivalent system with Equations (
23) and (
24) can be easily obtained.
Figure 20 shows a depiction of the system where no input is present:
Once
L is found and Equation (
21) is also solved, the exact
, which minimizes the
ISE, can be calculated. In order to calculate the optimal
analytically, Equation (
21) is rearranged as shown in Equation (
25). Equation (
26) can be readily obtained from the previous equivalences:
where
,
and
, all of them numbers. Therefore, as it can be seen, the integral quadratic error is equal to a function depending on
. The value of
that minimizes the ISE is in Equation (
27):
Replacing
and knowing that
,
and
are not reset leads to Equation (
28) where the optimal
can be seen:
The previous equation is computed at every consecutive reset instant resulting in an optimal
sequence in terms of ISE. Combining this error minimization method with the canonical form guarantees the compliance of all the design requirements while reducing the error and enhancing the system output as a result. Equation (
29) shows the computed value of
L for a system formed by the controller introduced in Equation (
16) and a double integrator plant:
Whenever the reset action is triggered, Equation (
30) is used to calculate the optimal
:
where
,
,
and
are the lateral position and its time derivatives (
,
,
and
) just before the reset action is applied.
3.4. LQR and CNF Controllers
As stated in the introductory section, the designed reset controllers were compared with an LQR and a CNF regulator. The LQR works on the basis of a perfect pole-zero cancellation hence the double integrator plant was considered. Two other integrators are connected to the prefiltered plant to create a system with four states being the lateral position and its time derivatives (
,
,
and
). In this way, by applying Bryson’s law, the maximum values of the states can be enclosed to match the design specifications. The final arrangement of the system is equivalent to the one described in
Figure 15 where
,
,
and
are now replaced by
,
,
and
. Equation (
31) defines the transfer function of the closed-loop system whose structure is identical to the system formed by the base linear controller and the double integrator plant:
An LQR cannot produce a controller capable of meeting the design specifications all at once due to the fundamental limitations that affect linear systems. Therefore, the controller found by using this method (
) was adjusted to fulfill as many design requirements as possible. Acceleration, jerk, settling time, rise time and overshoot are restricted to their design ranges, whereas disturbance rejection exceeds the maximum allowed by far. This can be easily derived by computing the closed-loop poles and zeros. There is one small zero at
canceled by a small pole close to the origin. Since the LQR step response is restricted by the balance of error areas in
Figure 16, the only way for an LQR to approach the step response of the reset control is to produce a certain type of slow hidden response, after the first zero-crossing, which is the main drawback of linear quadratic control.
Regarding the CNF regulator, it is based on the work developed in [
31]. This paper investigated the use of CNF for the path following control problem for four-wheel independently actuated autonomous ground vehicles. Since the case study at issue differs from the one in [
31], some adaptations had to be made. First, due to the fact that the control approach proposed in this work is conceived to be operational in a straight road section, the curvature term of Equation (
9) in [
31] is zero. Second, instead of considering two control signals as [
31], this paper considers only
.
Figure 21 contains a schematic depiction of the CNF regulator coupled with the plant of the vehicle. There are two distinguishable zones. A block marked as
which will be referred, hereinafter, as the internal loop and the rest of the blocks, excluding the plant, which will be referred as the external loop.
As mentioned in
Section 1, CNF is a composite nonlinear control technique consisting of a linear and a nonlinear control law directly connected. Both the lineal and the nonlinear feedback laws are represented in Equations (
32) and (
33), respectively:
where
F,
G,
,
and
P are defined in [
31].
r is equal to
, this being the desired yaw rate and it is equal to
.
is not equivalent to
, which is, however, equal to
. To simplify the comparison and facilitate the design, it is assumed that
is measured and
.
The total control actuation signal is the result of adding the linear and the nonlinear parts as showed in Equation (
34). This control law is particularized for a vehicle traveling at a longitudinal velocity of 25 m/s and without extra loads:
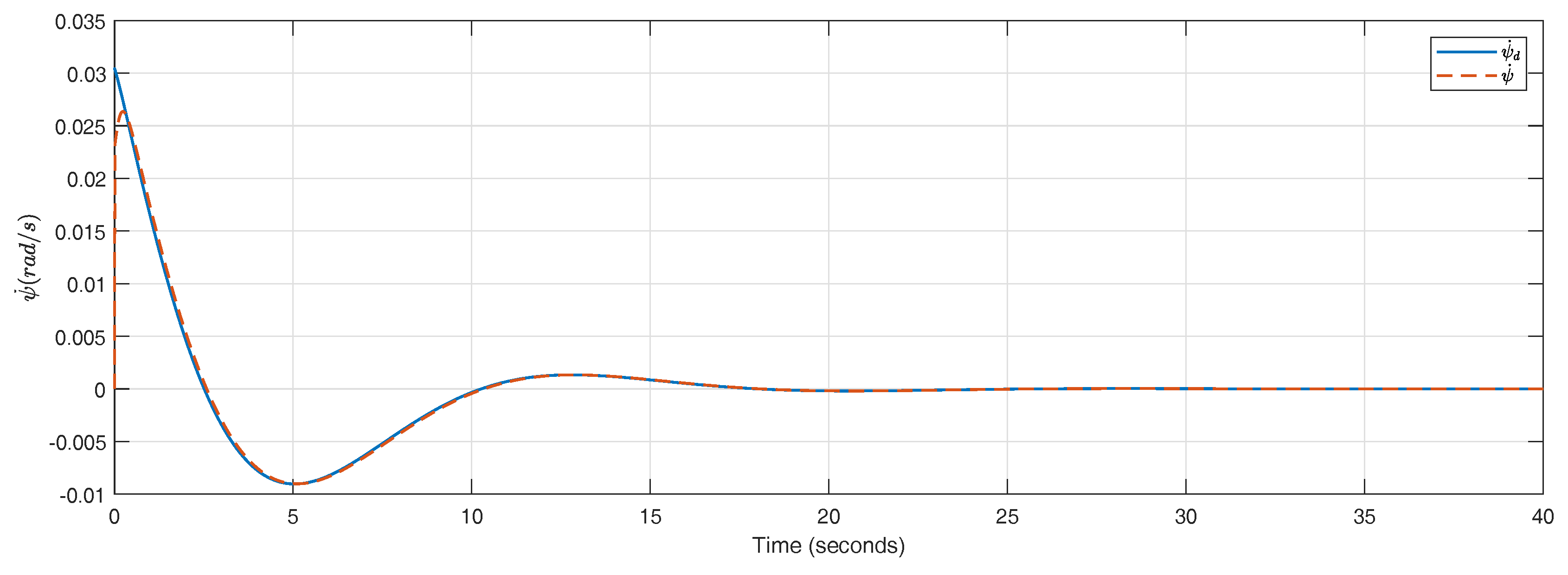
As it can be seen in
Figure 22, the yaw rate is perfectly tracked. Since the internal loop (
) presents such fast dynamics, the whole system depicted in
Figure 21 can be approximated by the open-loop transfer function in Equation (
35):
where
is the longitudinal velocity of the vehicle and
c can be obtained from the following equation:
From the previous transfer function, and can be readily tuned to obtain a convenient response in an approximate manner ( and ). The complete system is simulated to test the performance of both internal and external loops connected together. The result of this simulation presents some issues concerning acceleration and jerk at the beginning of the maneuver. As soon as the vehicle initiates the maneuver, the acceleration produced by the control system is steep enough to produce unbounded jerk.
Acceleration and jerk can be restricted to its optimal range, in terms of comfort by filtering the error signal to attenuate them at the beginning of the maneuver. From Equation (
35), this filtering would be achieved by means of using an intermediate first-order filter that is represented in Equation (
37) by
. This method has some disadvantages regarding the dynamics of the resulting system. Ideally,
should be chosen to filter the initial peaks and to have an effect as little as possible on the CNF setup. In order for the filter to accommodate jerk to the comfort zone, its value would have to be so small that the resulting system would have a slow pole producing, as a result, high values of settling and rise time.
was finally selected at
as an intermediate solution. Even though it is true that the resulting system does not meet the comfort requirements, it at least produces bounded values of jerk:
3.5. Simulation Results
This section is dedicated to the comparison of all the reset strategies mentioned in the previous section as well as two other controllers based on linear-quadratic control and composite nonlinear feedback control. For the following simulations, a perfect pole-zero cancellation is assumed and, therefore, neither prefilters nor complete plants are used but the double integrator. This prerequisite holds for all the reset controllers and the linear-quadratic regulator. The CNF regulator, however, was designed for the complete model so the system is not guaranteed to operate correctly for any conditions differing from those taking into account in the design of the controller.
Firstly, results from the reset controllers are compared separately to determine which of the reset strategies present better responses.
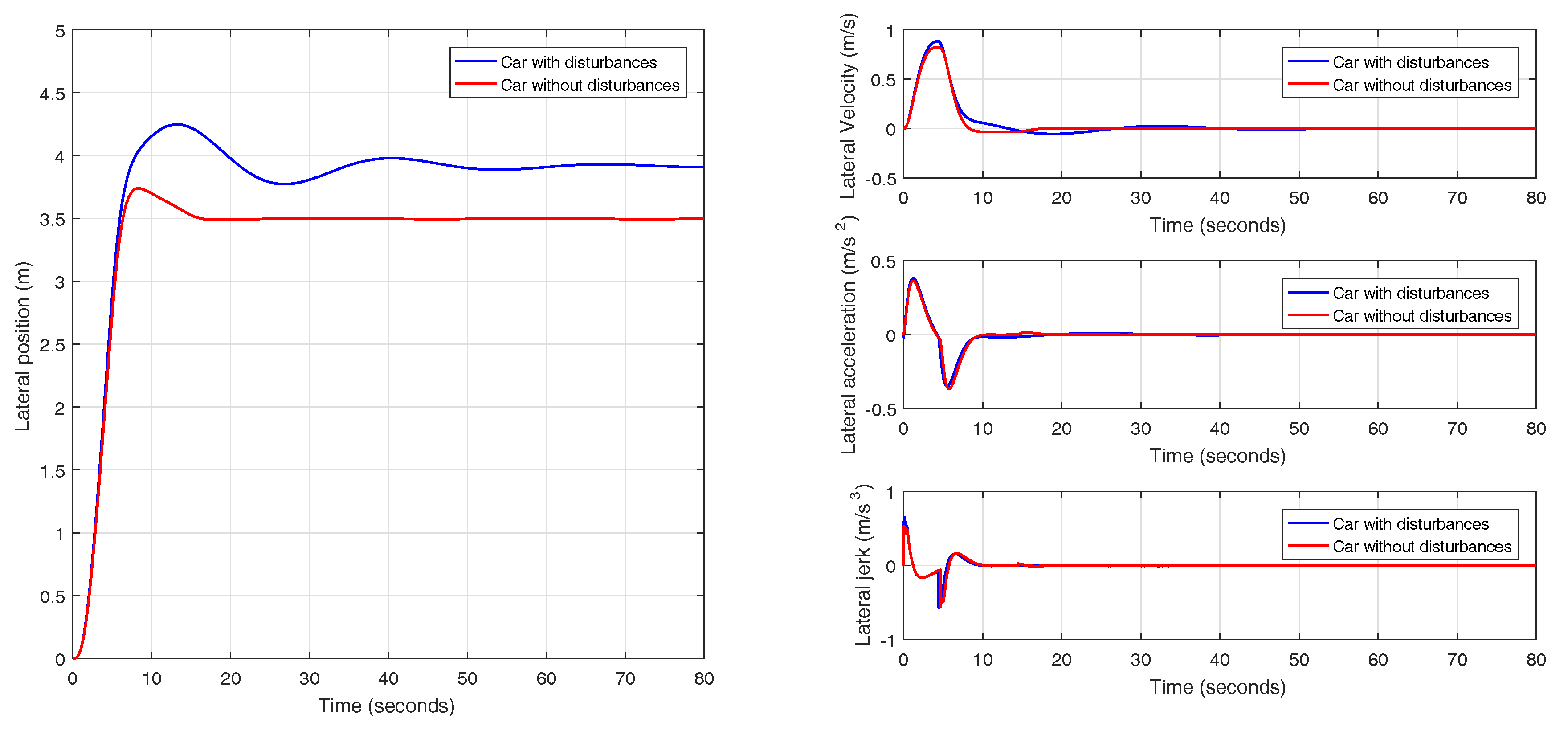
Figure 23 shows the lateral position, velocity, acceleration and jerk of the lane change maneuver for each of the six reset regulators compared together with the base linear controller. For the fixed reset band controllers, the band is set to
and, for the variable reset band regulators, the band is set to
. Both values were selected by design convenience based on simulation results.
In view of the information collected in
Table 4 and the results depicted in
Figure 23, it can be firmly concluded that those controllers that employ the ISE minimization method outperform those endowed with a full reset action, regardless of the reset strategy. Among the regulators using the minimization technique, it is difficult to discern which one is the best since two of them present very similar responses (fixed and variable reset band controllers).
Two of the reset controllers meet all the design criteria so only them are compared together with the linear-quadratic and the CNF regulators in
Figure 24. As stated in
Section 3.4, none of the two alternative controllers fully satisfy all the design specifications. The linear-quadratic regulator lacks an adequate disturbance rejection ratio surpassing by far the design criterion set at
. The main problem with this controller is the hidden slow dynamics commented in
Section 3.4. The main reason for this problem is that LQR (as any other linear control) is affected by the error area restriction in
Figure 16, which only nonlinear controllers are able to overcome. The CNF controller exhibits good performance, but, in the form presented in [
31], it is restricted to the internal loop (yaw rate control), which has an excellent performance, as seen in
Figure 22. The solution proposed in [
31] for the external loop, based on gains
and
, is purely linear and does not exploit the full potentials on CNF. Another advantage of [
31] is the use of a nested cascade structure that takes full advantage of gyroscope yaw rate measurements. Future work could consider an extension of [
31] that also includes CNF in the external loop.
Even though this work focuses on a lane change from a control perspective at low level, it may be of interest to test the responses of the reset controllers for a variable input just as it would be in a more realistic scenario. Only those reset strategies meeting all the design criteria are tested for a variable input. In this case, a sine wave of period 40 s is chosen as the input. In
Figure 25, it can be seen how a variable reset band controller can adapt better to a varying input as opposed to a fixed reset band controller that is designed to work with a particular input reference.
As mentioned previously, in addition to constraints on the time domain, linear systems also exhibit restrictions on the frequency domain. Endowing a linear controller with a reset strategy may redound to improvements on the frequency response of the system. It can be concluded from
Figure 26 that using a variable reset band with optimal reset yields a controller with an enhanced frequency response. The base linear controller presents a maximum around
rad/s, whereas the reset controller attenuates that peak. Computing the sum of the areas of the estimated sensitivity function in the reset case produces a value different from zero
, the positive area being equivalent to
% of the negative area. This is due to the fact that the BLC is restricted by Equation (
18) while the reset controller is not, for this reason a suppression of the sensitivity function at some frequency range does not necessarily imply an increment in other frequencies.







































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}