Impact Monitoring for Aircraft Smart Composite Skins Based on a Lightweight Sensor Network and Characteristic Digital Sequences



Abstract
:1. Introduction
- (1)
- The PZT sensor network of ASCSs often contains a large number of PZT sensors. Firstly, each PZT sensor needs at least one lead wire to transmit impact response signals. Therefore, the PZT sensor network has a large number of lead wires, which introduce large additional weight to the aircraft. Secondly, each PZT sensor often needs to occupy at least one monitoring channel of an impact monitoring system. A large number of PZT sensors require an impact monitoring system which has a large number of monitoring channels. This results in a large size, high power consumption and high complexity of the impact monitoring system leads. For example, when the PZT sensor network of ASCS consists of 100 PZT sensors, there are at least 100 signal transmitting lead wires and the impact monitoring system has 100 monitoring channels. This makes the performance and cost of the sensor network and the impact monitoring system difficult to be accepted for on-line and continuous impact monitoring.
- (2)
- Most of the impact monitoring methods [12,13,14,15,16,17,18,19,20,21,22] aim at high-precision impact localization such as geometry-based localization, energy-based localization and impact imaging-based localization. These methods need to obtain complete impact response signals from PZT sensors. To achieve this, a monitoring channel of an impact monitoring system often contains signal conditioning circuits and a signal acquisition circuit. When the PZT sensor network of an ASCS contains a large number of PZT sensors, the number of monitoring channels becomes very large. Furthermore, a complex computation module is also needed to process impact monitoring algorithms [23,24,25]. These factors increase the weight and power consumption of the impact monitoring system and they limit the application of ASCSs to on-line and continuous impact monitoring. This is the reason why these systems are mainly used in laboratory or ground applications [11,26].
2. The Principle of Impact Region Monitoring of the ASCS
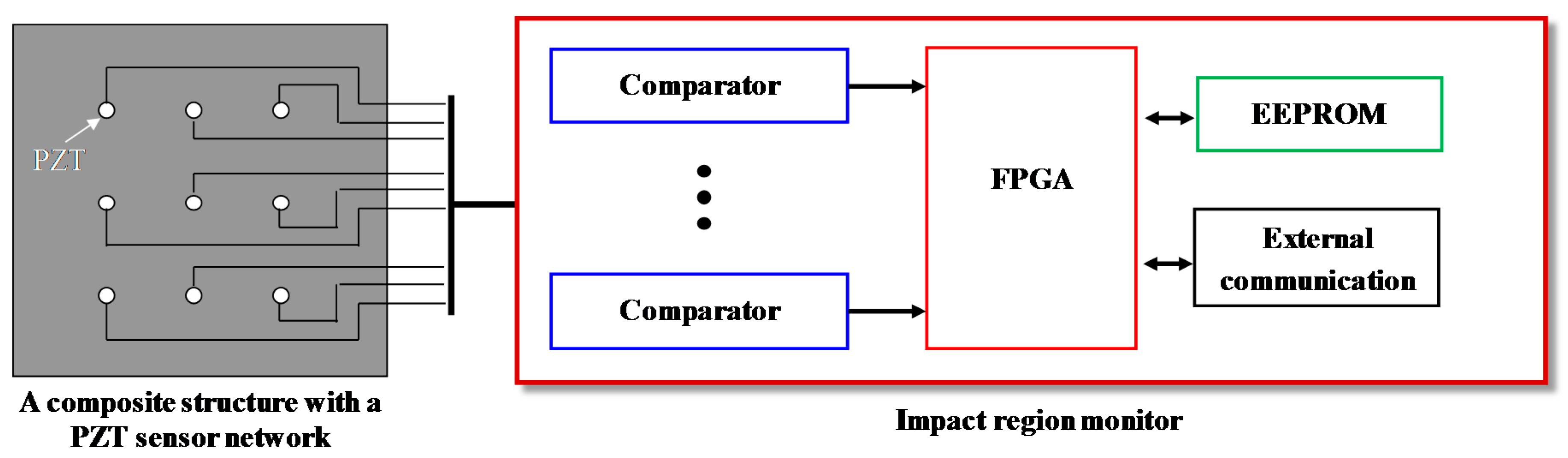
2.1. The Architecture of the IRM
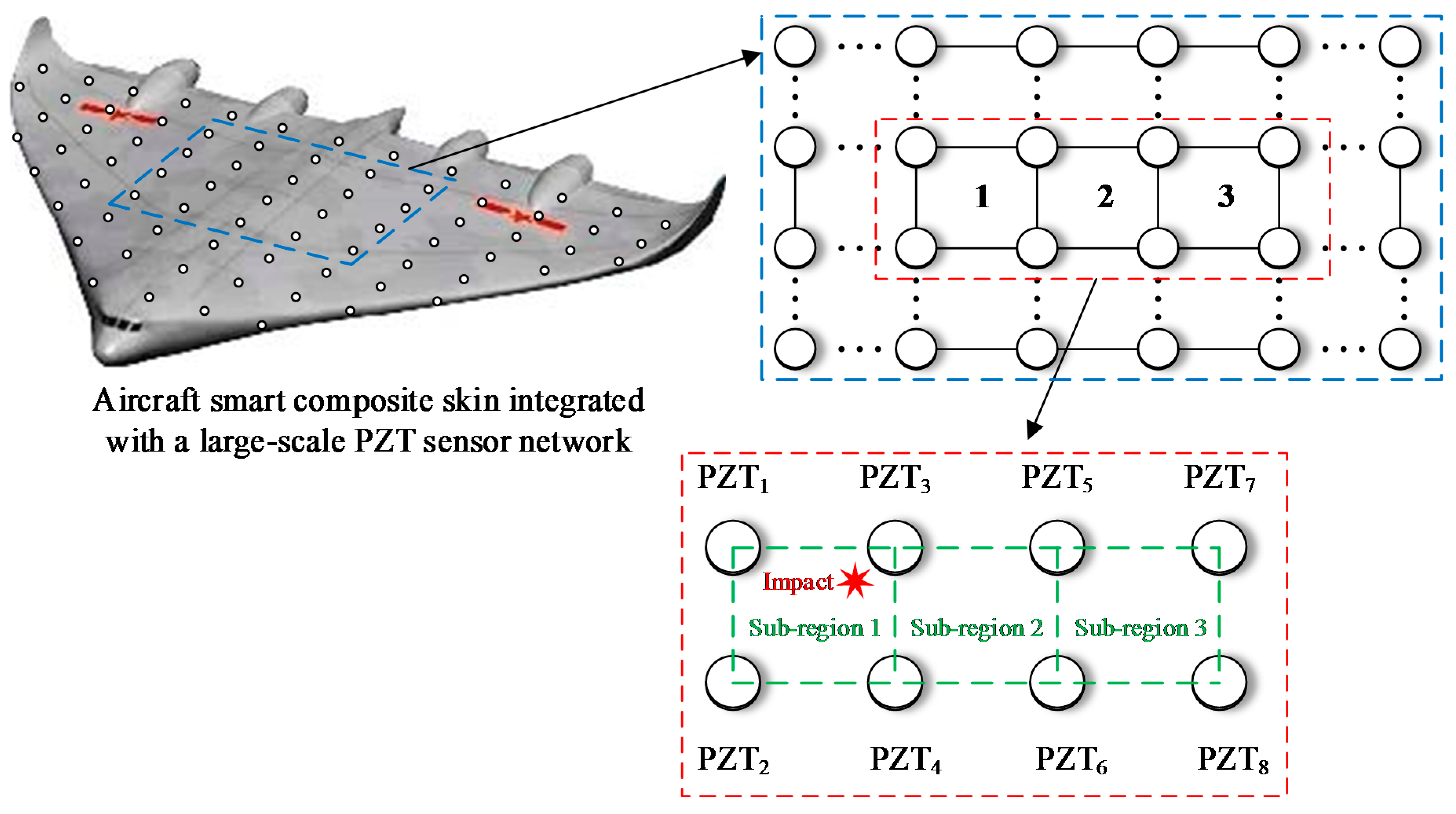
2.2. The Principle of Impact Region Localization
3. Lightweight Sensor Network
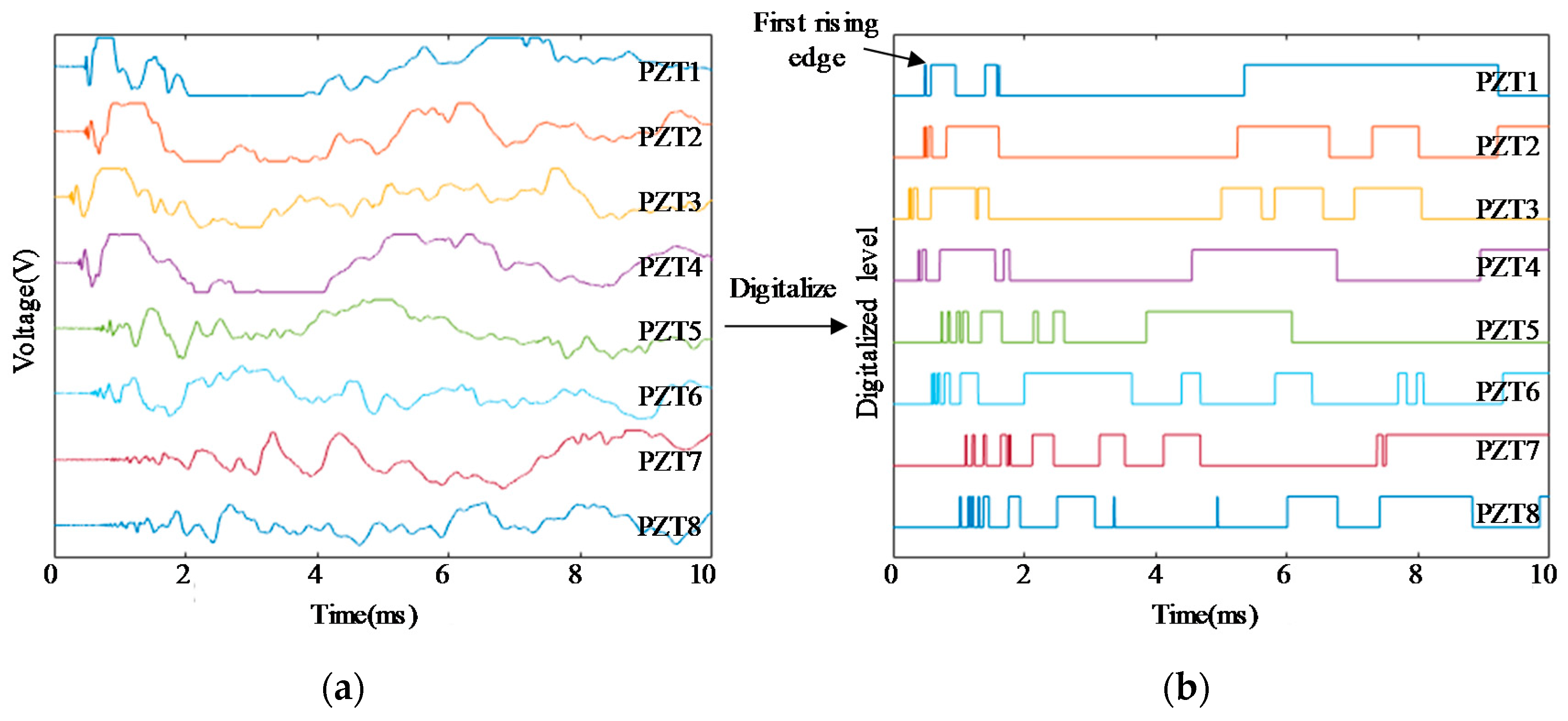
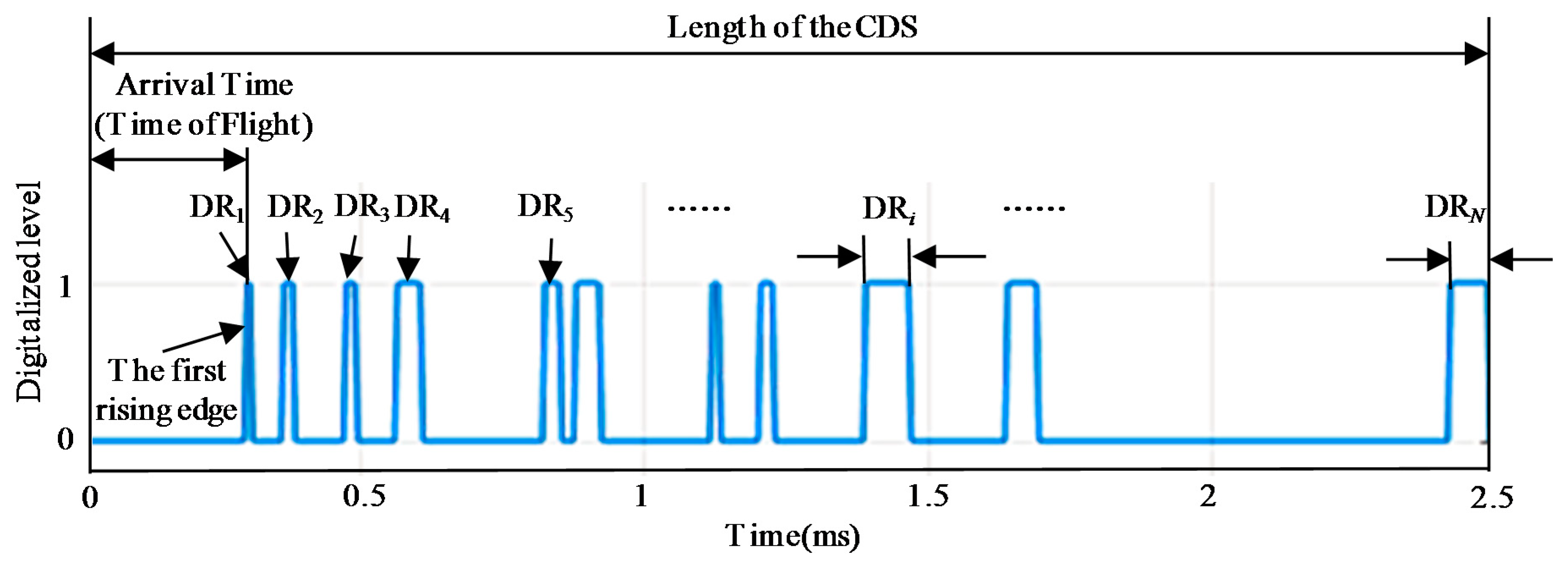
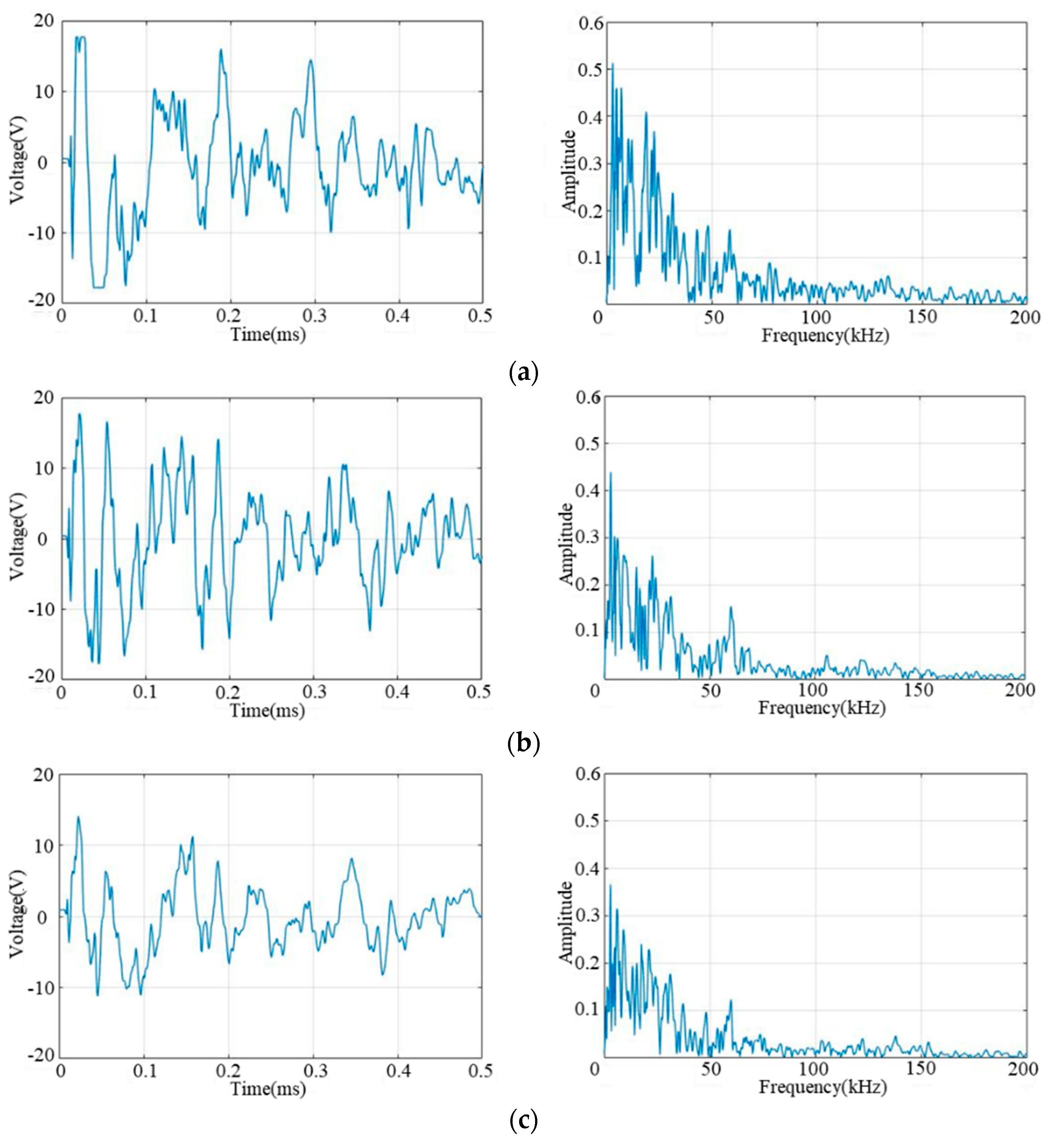
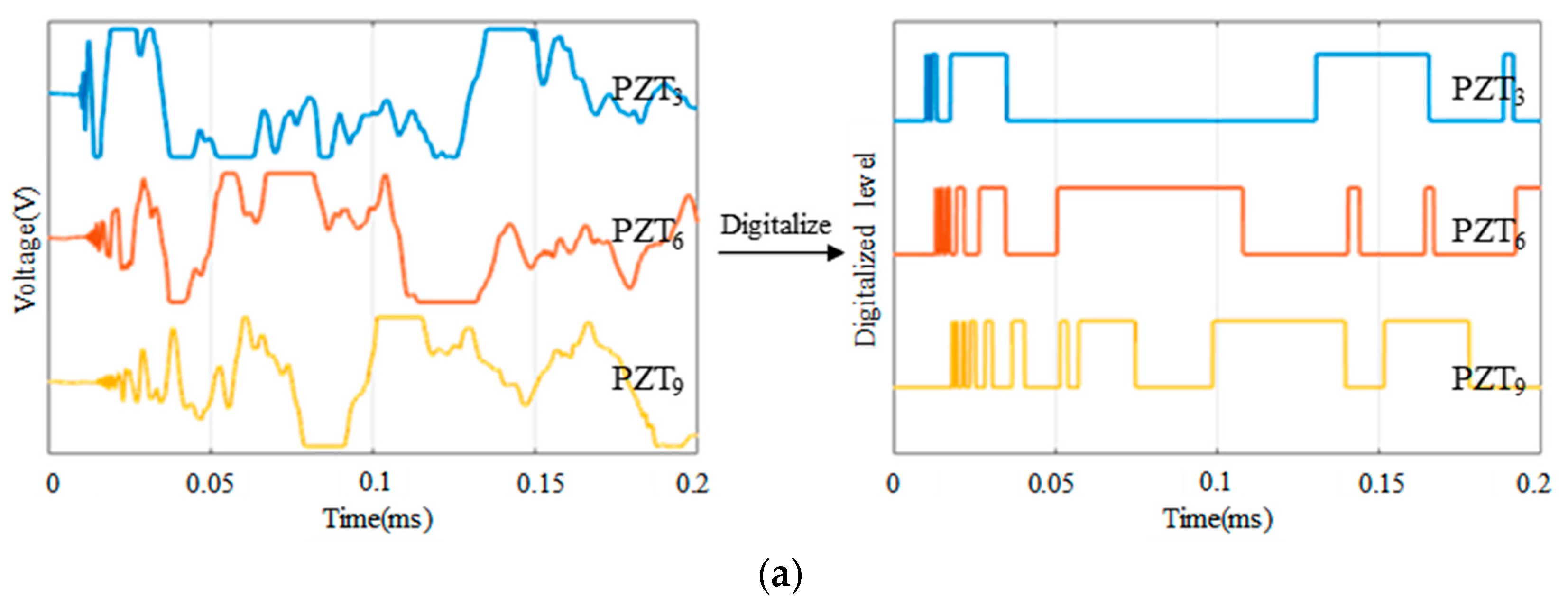
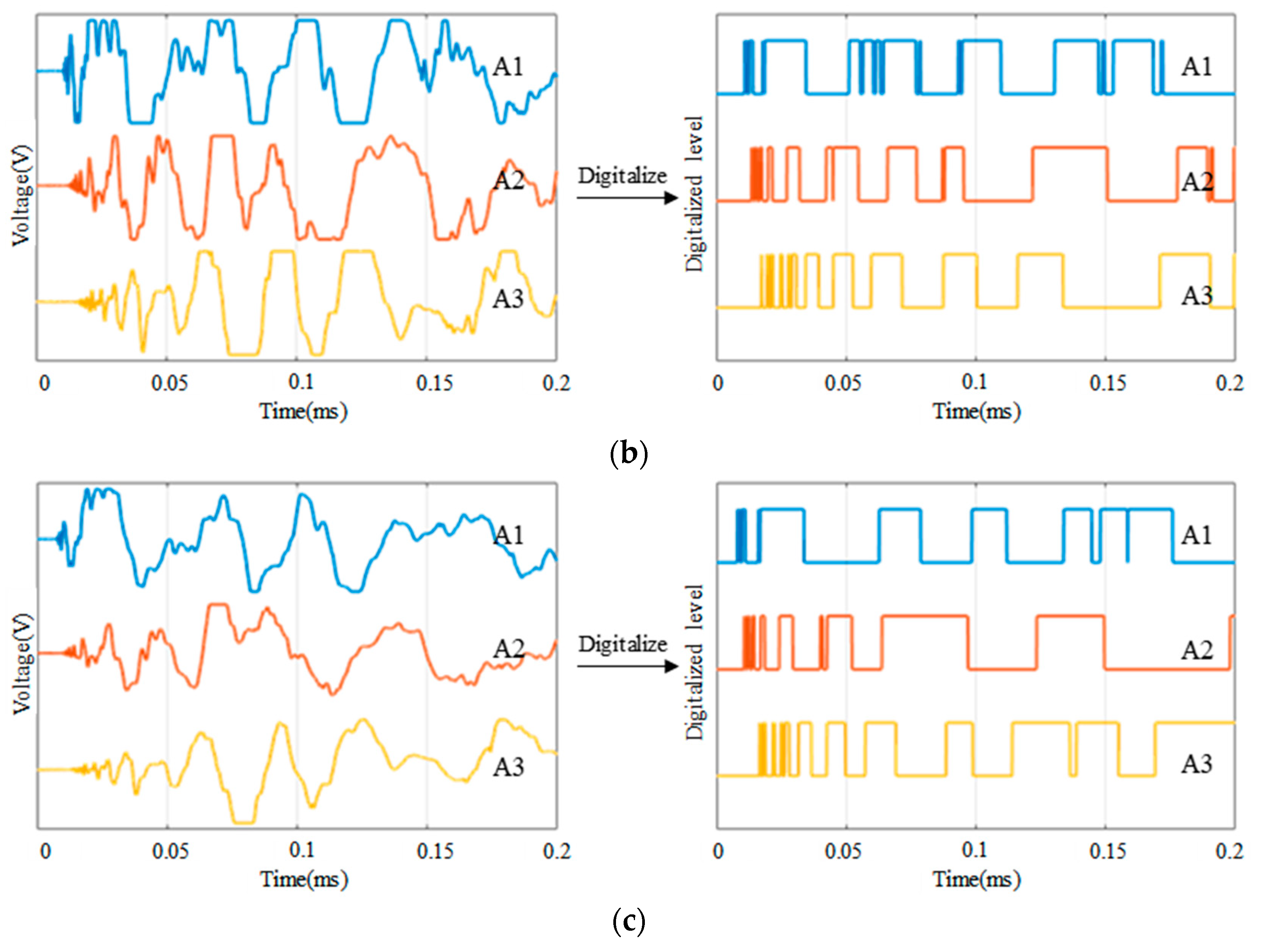
3.1. Signal Features of Continuous Sensor
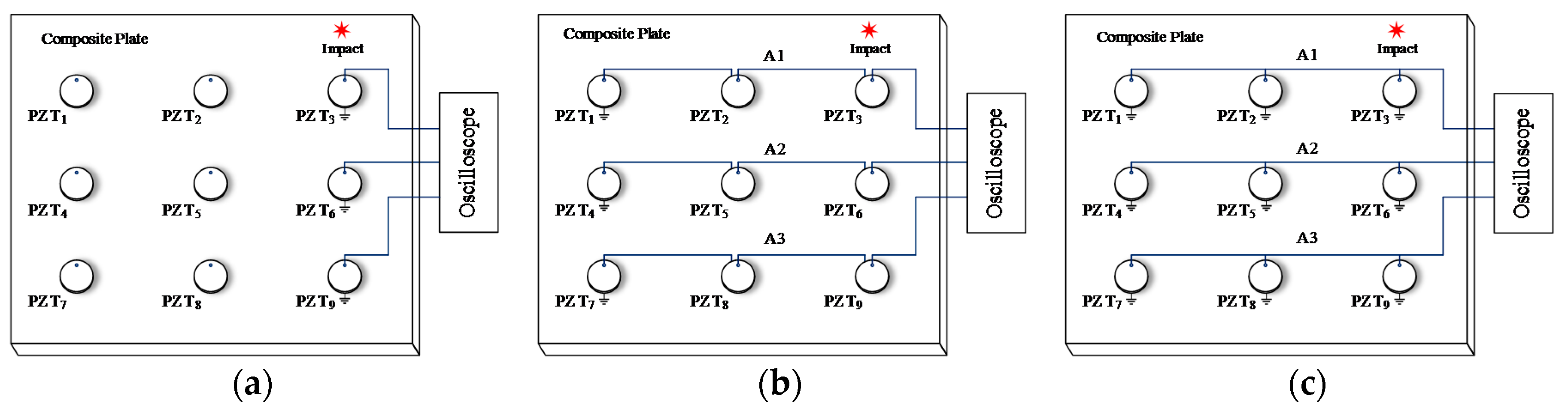
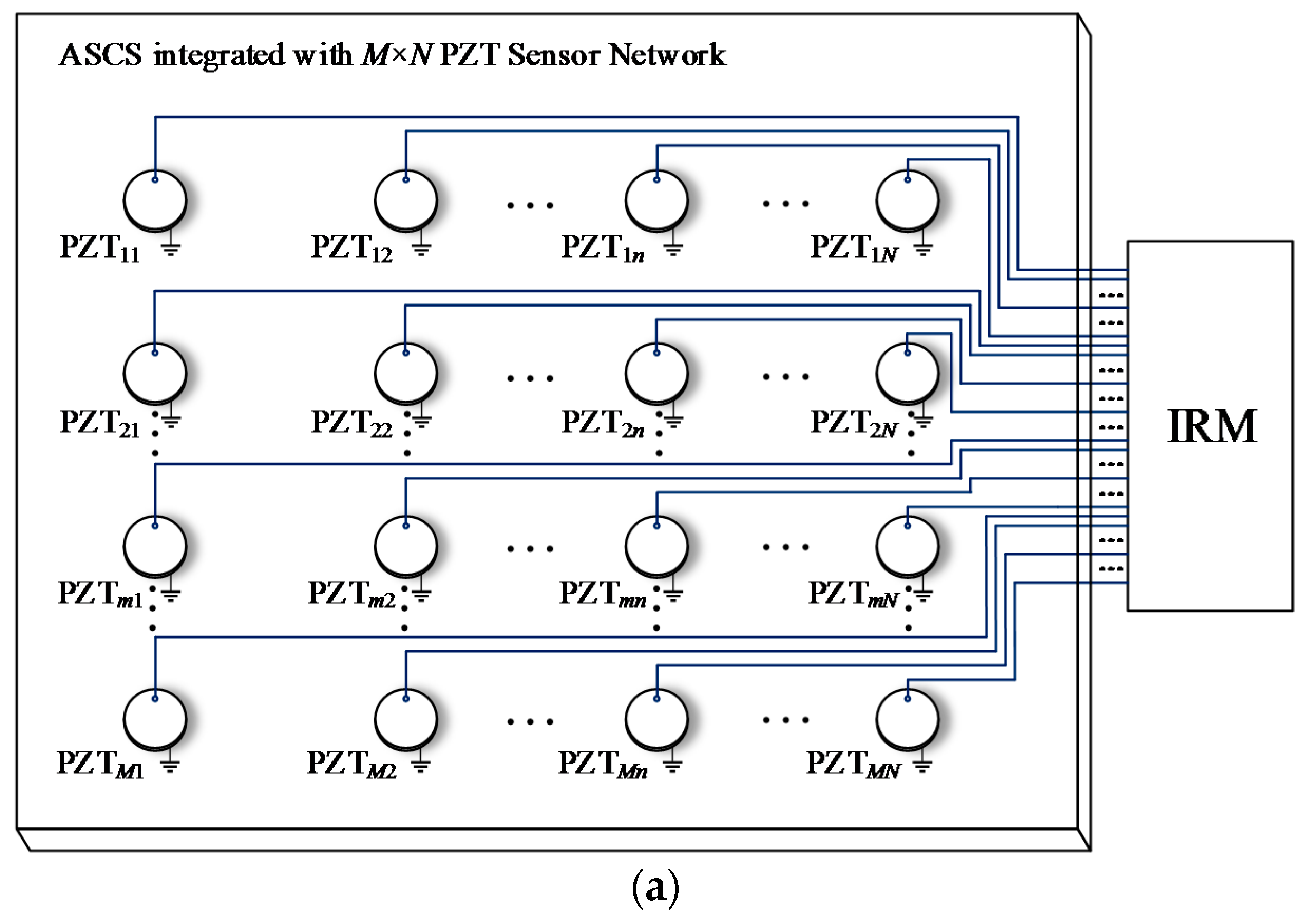
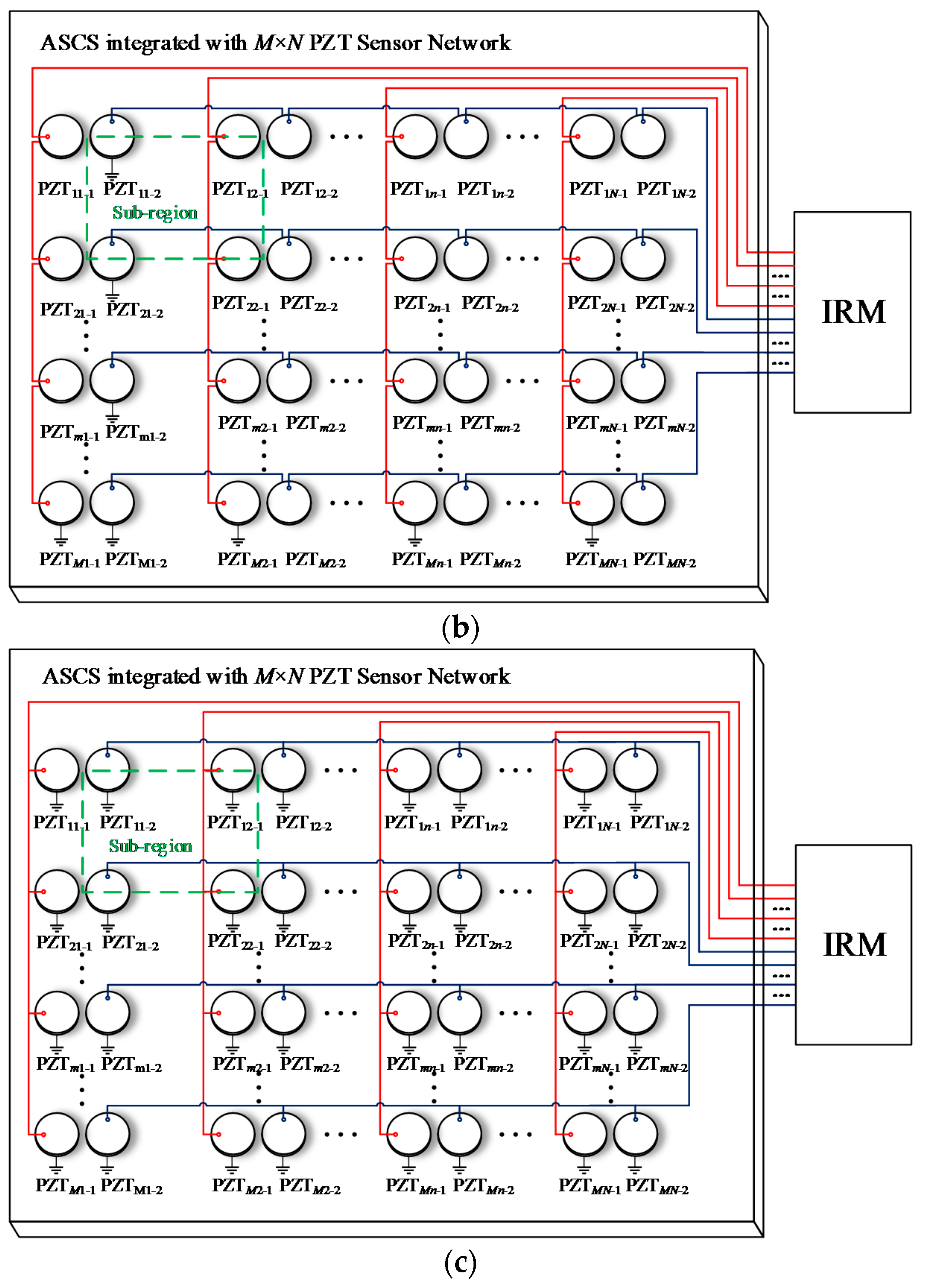
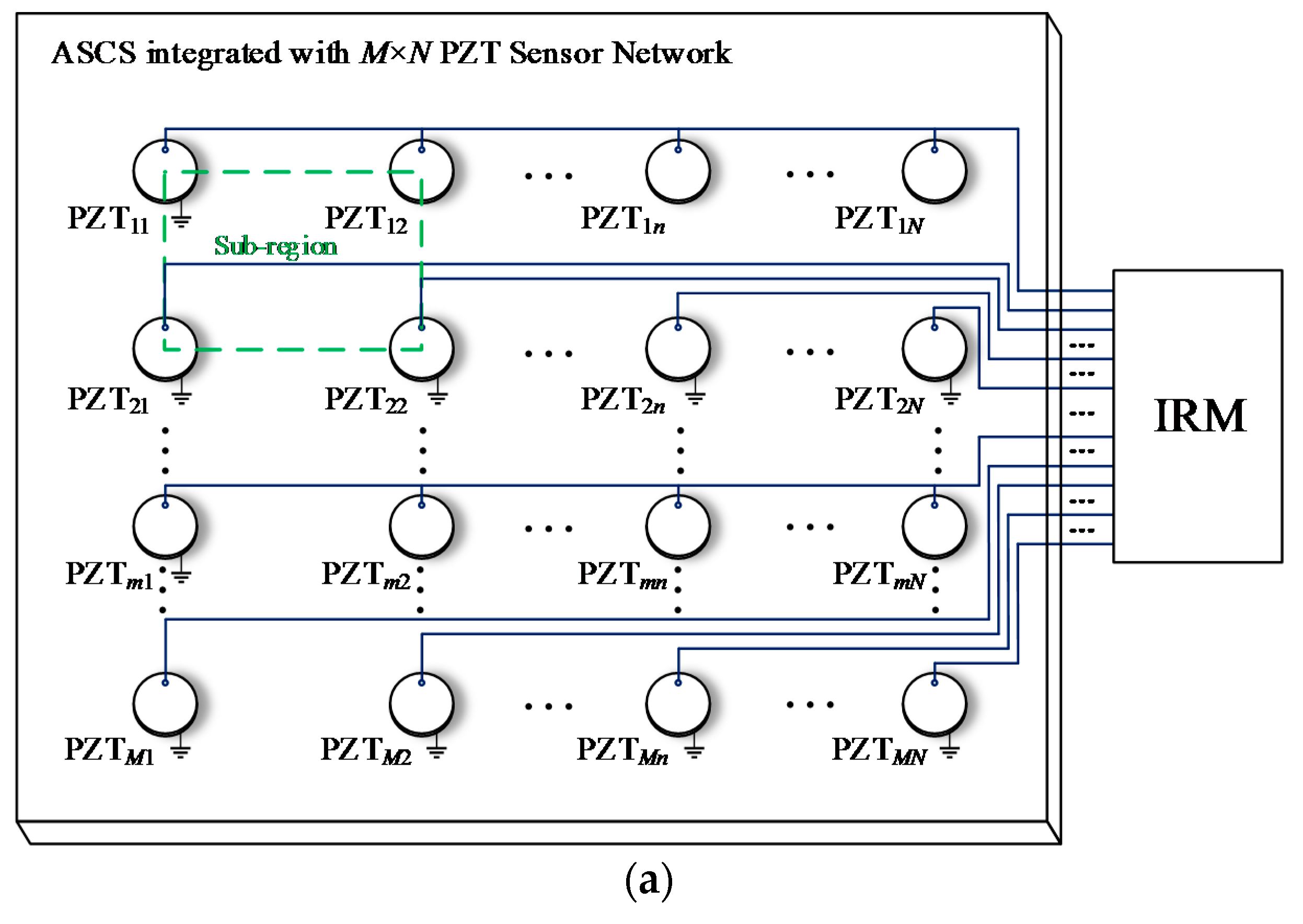
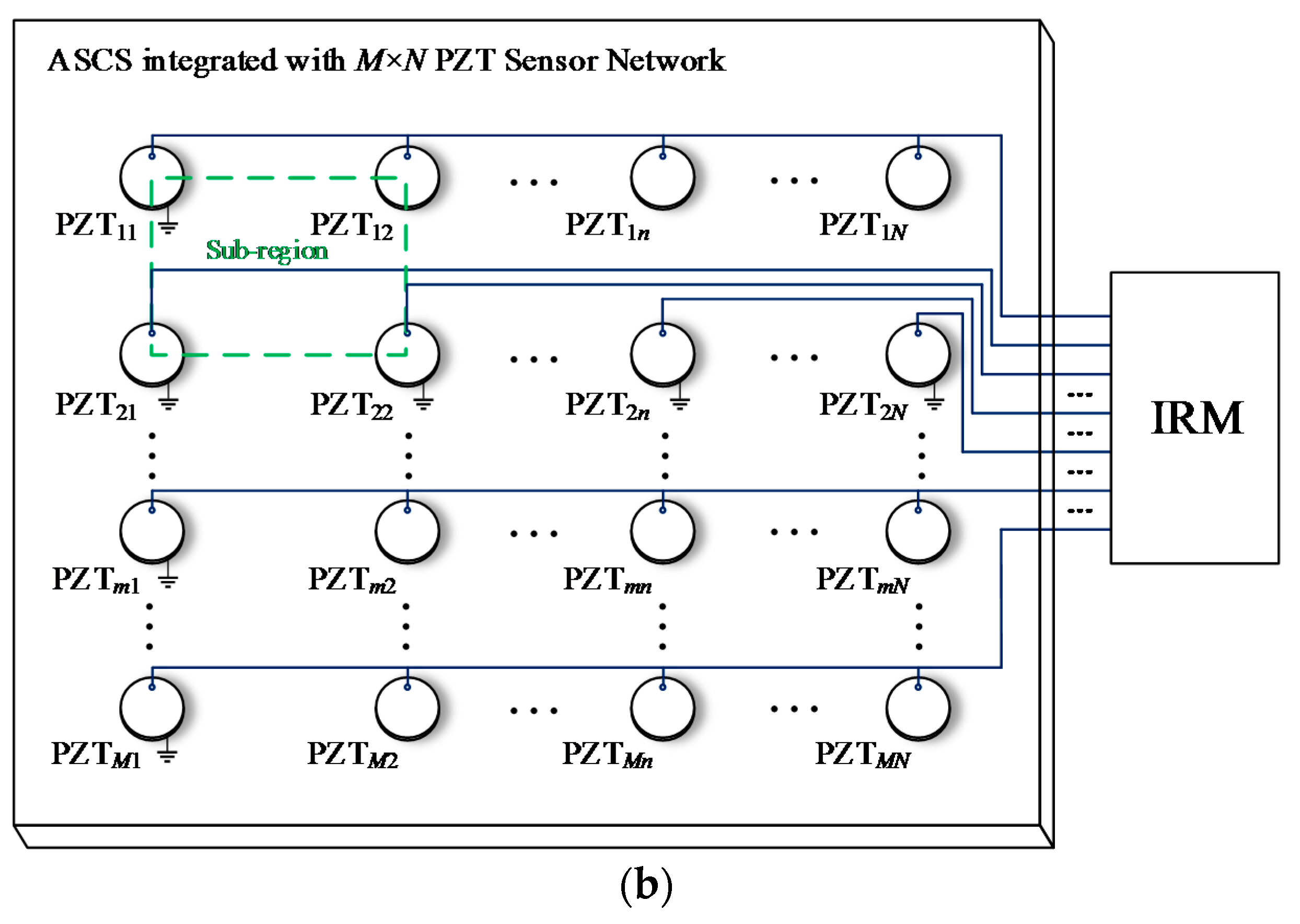
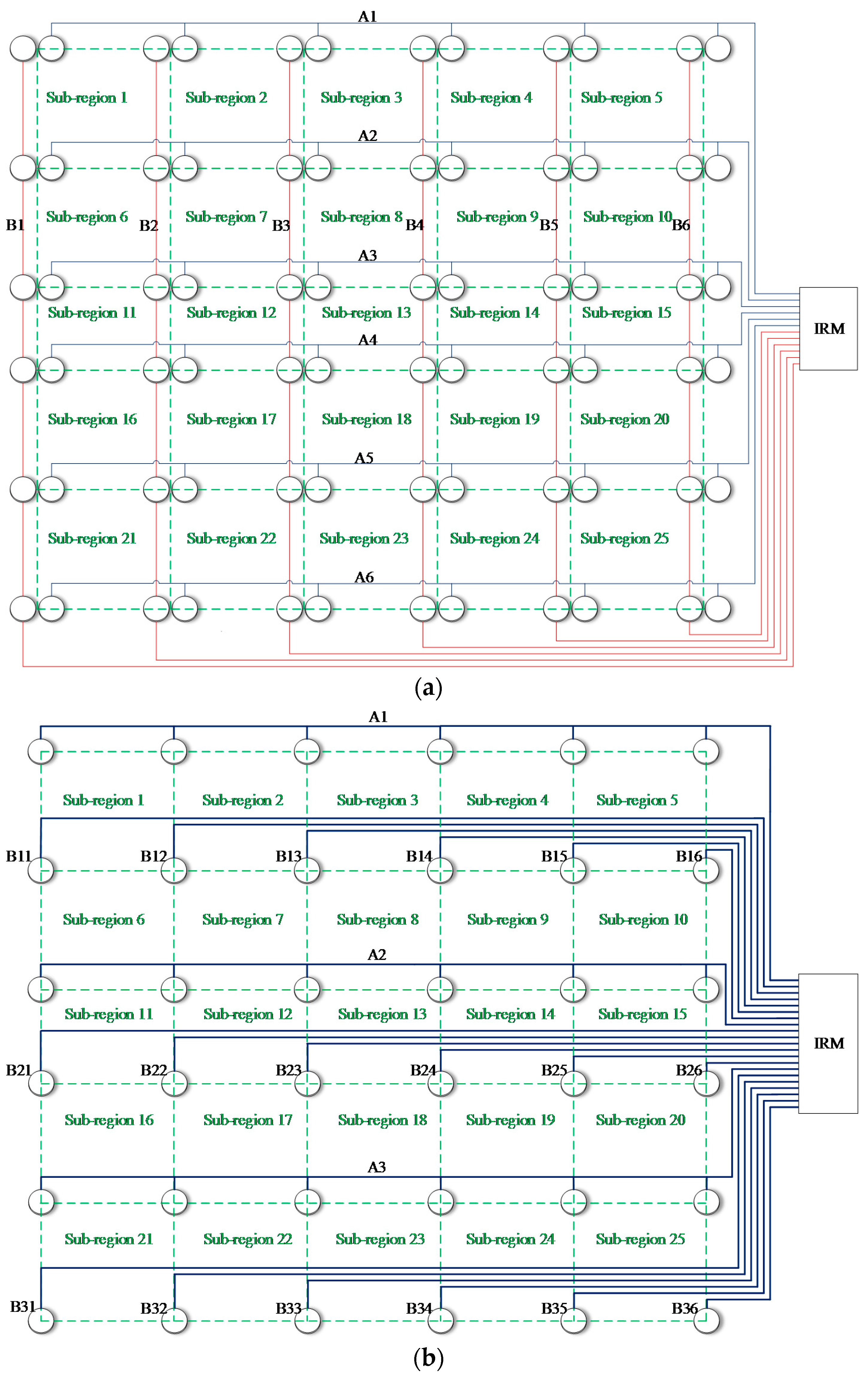
3.2. The Architecture of the Lightweight Sensor Network
4. Impact Region Localization Method Based on Lightweight Sensor Network
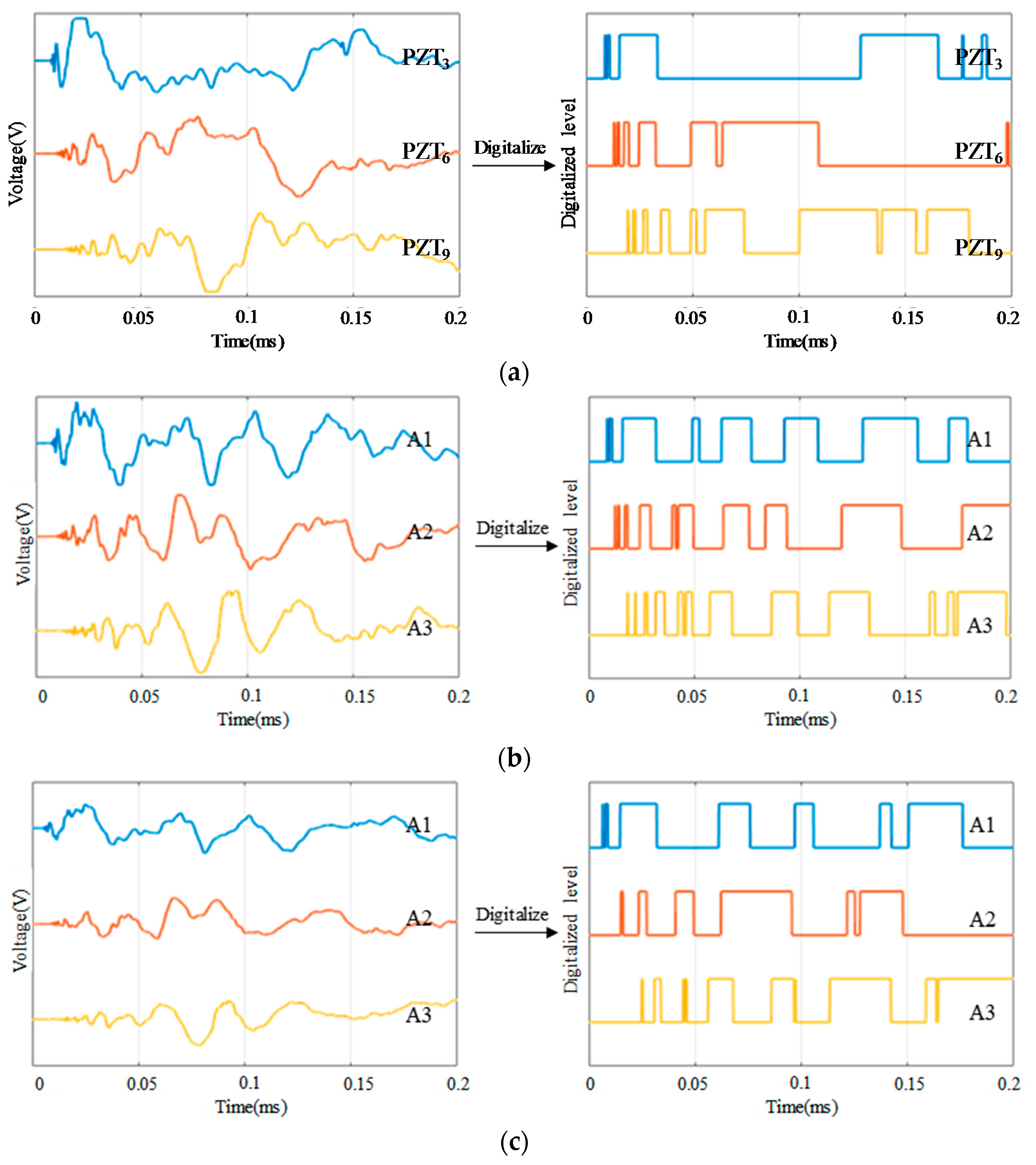
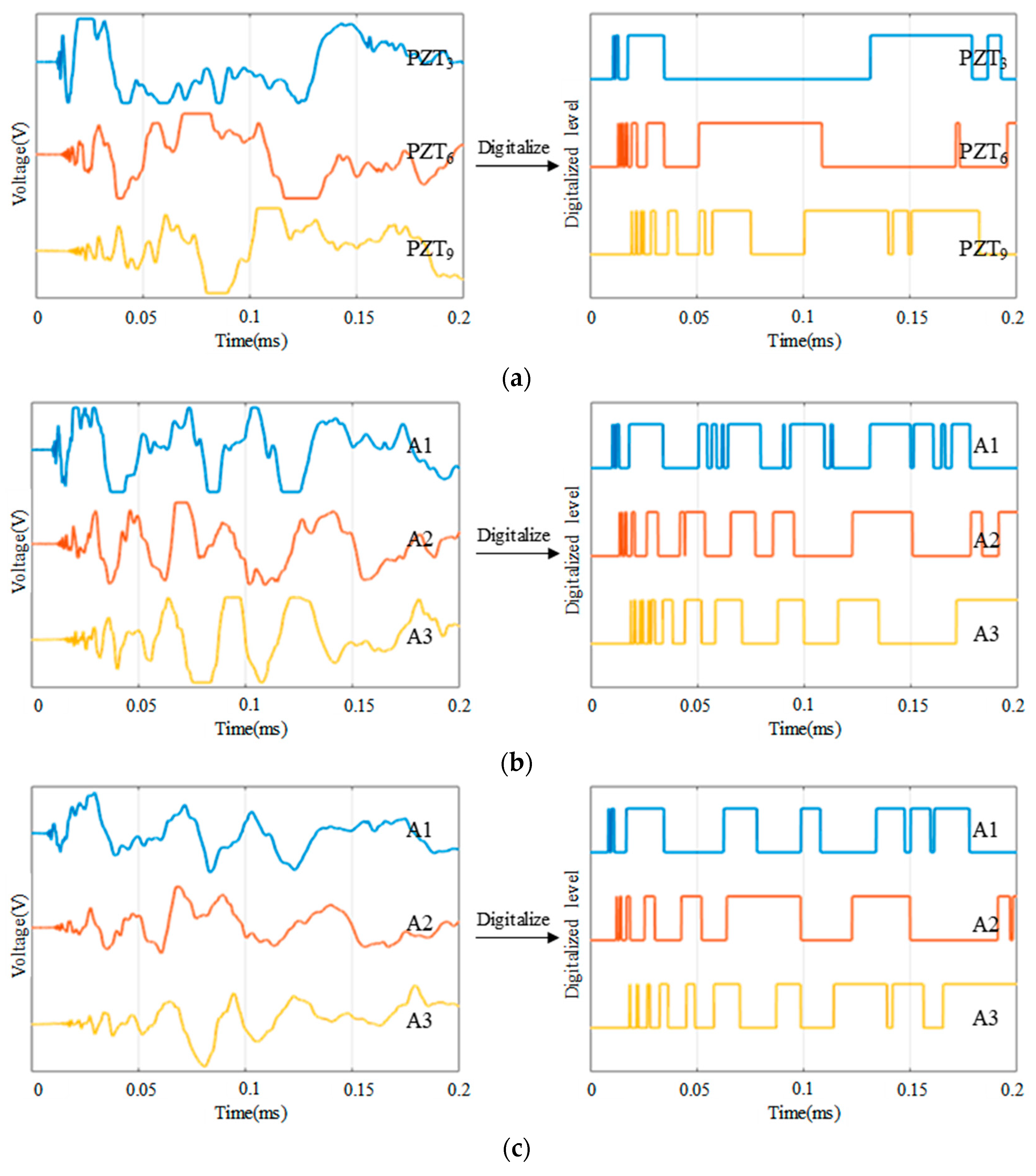
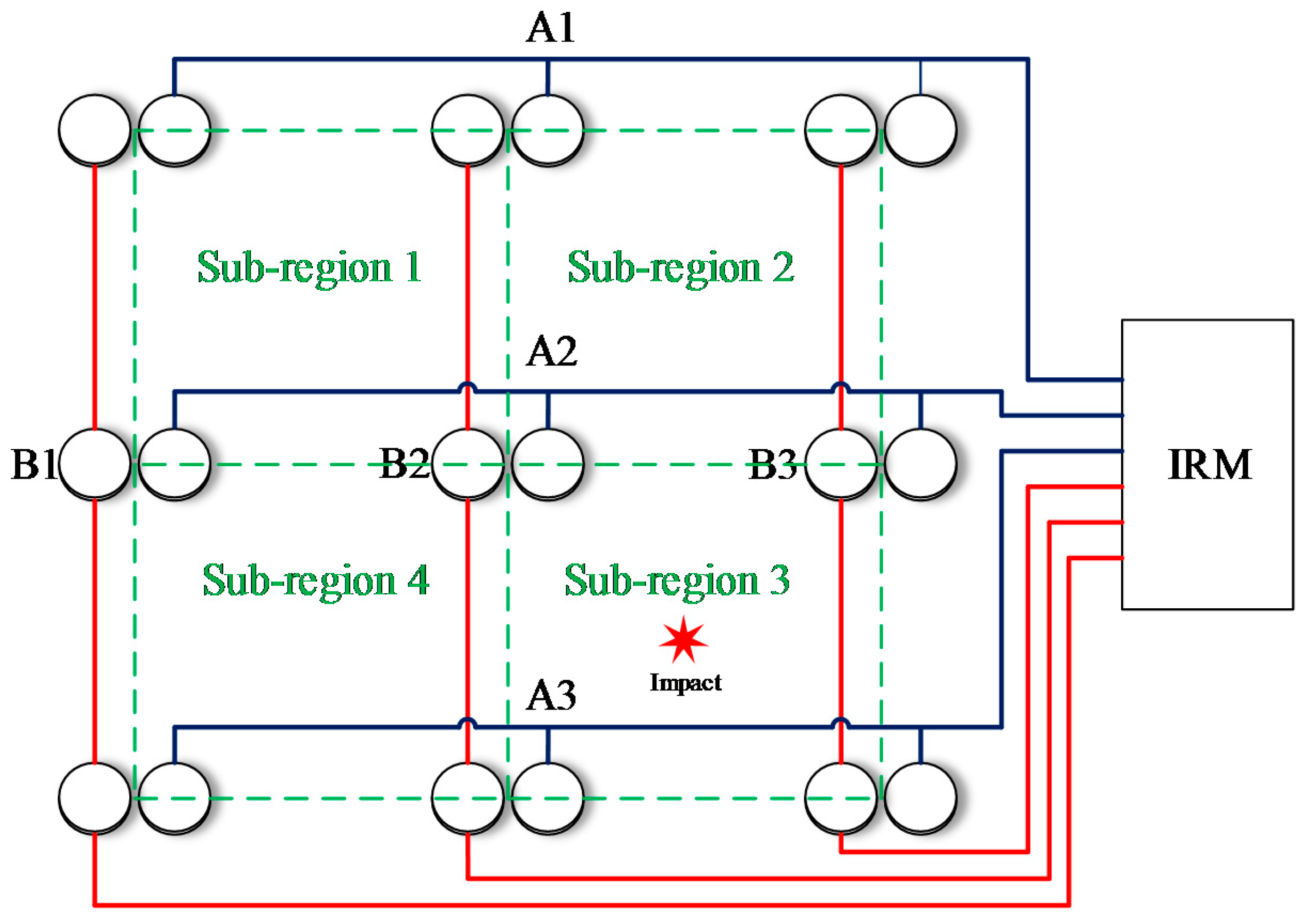
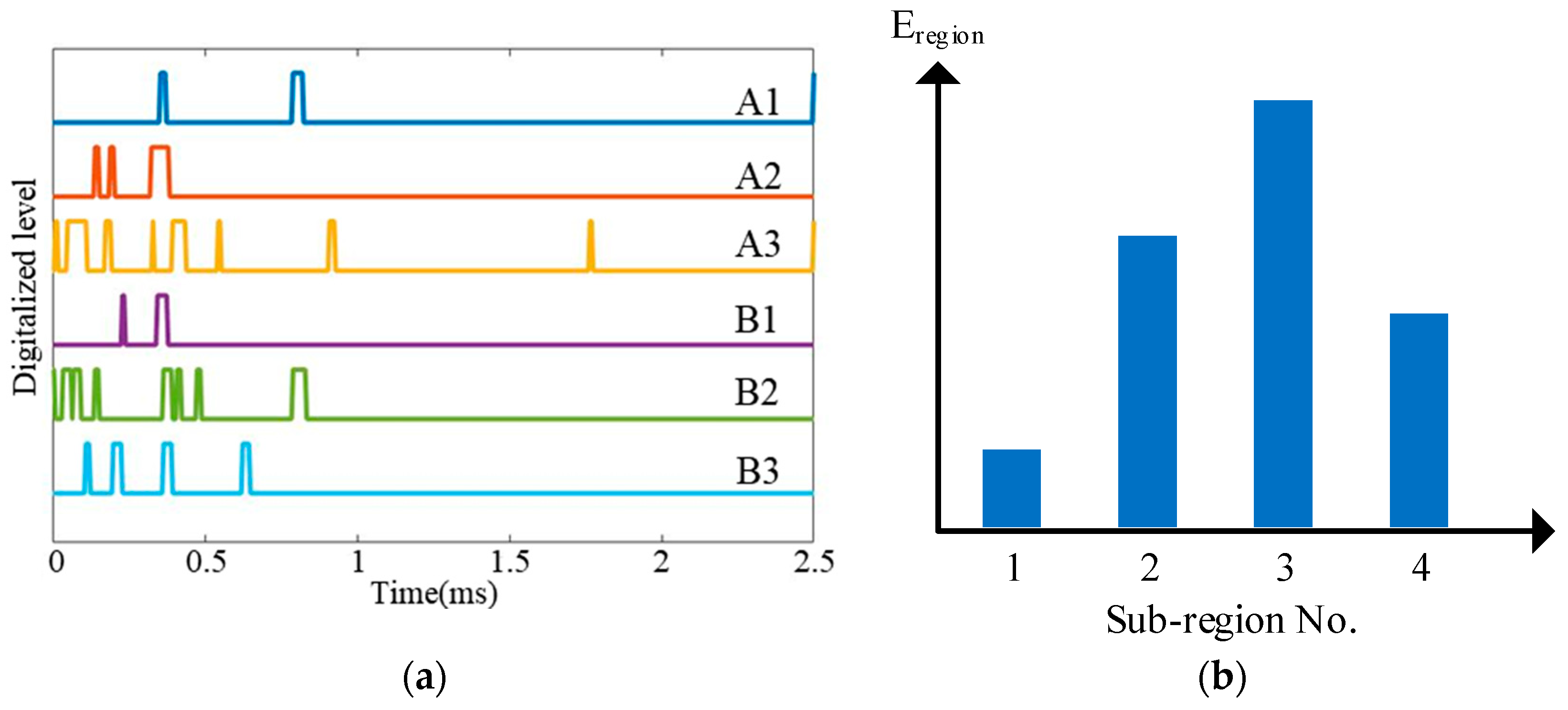
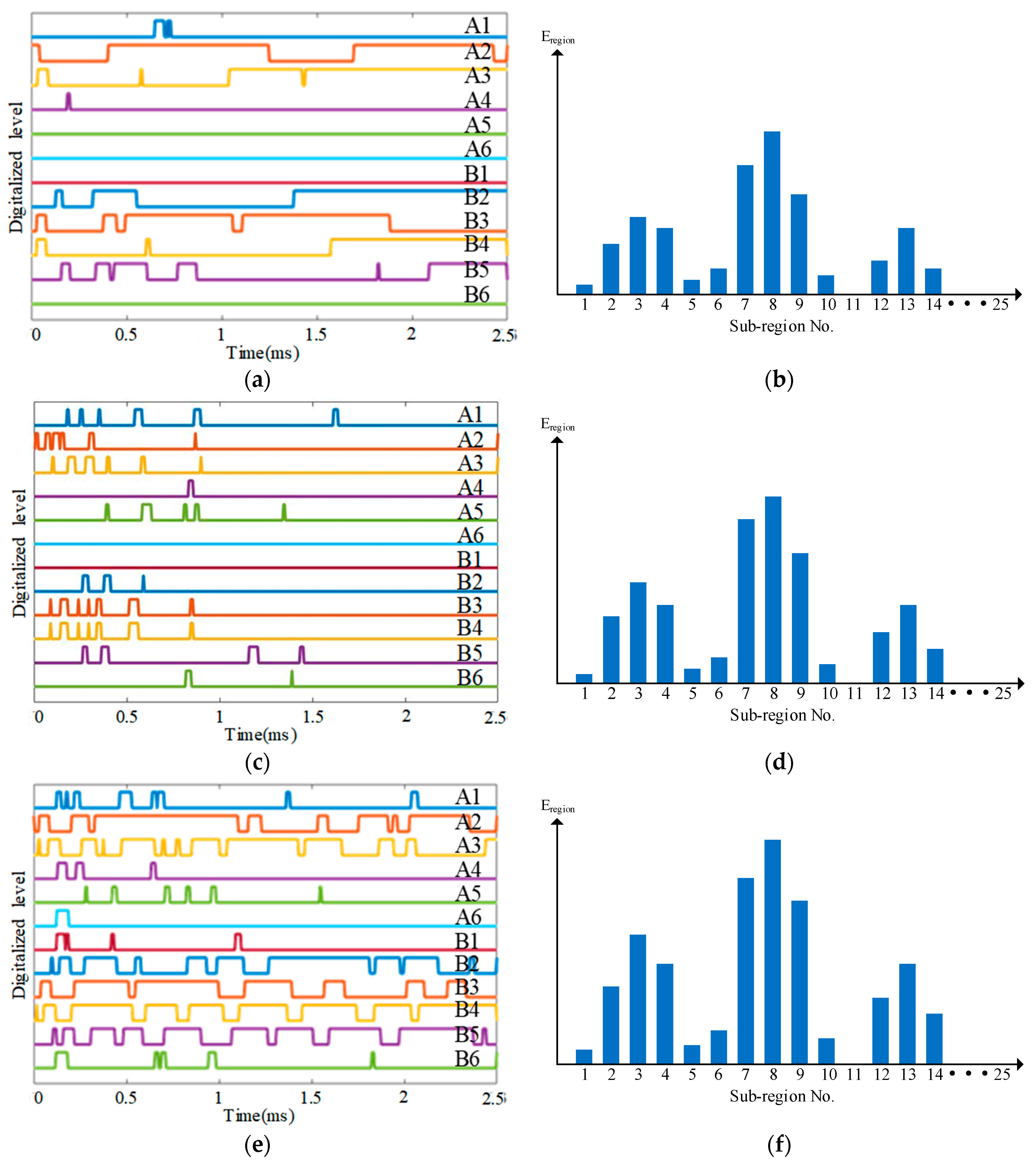
4.1. Impact Region Localization Method
4.2. Experimental Evaluation
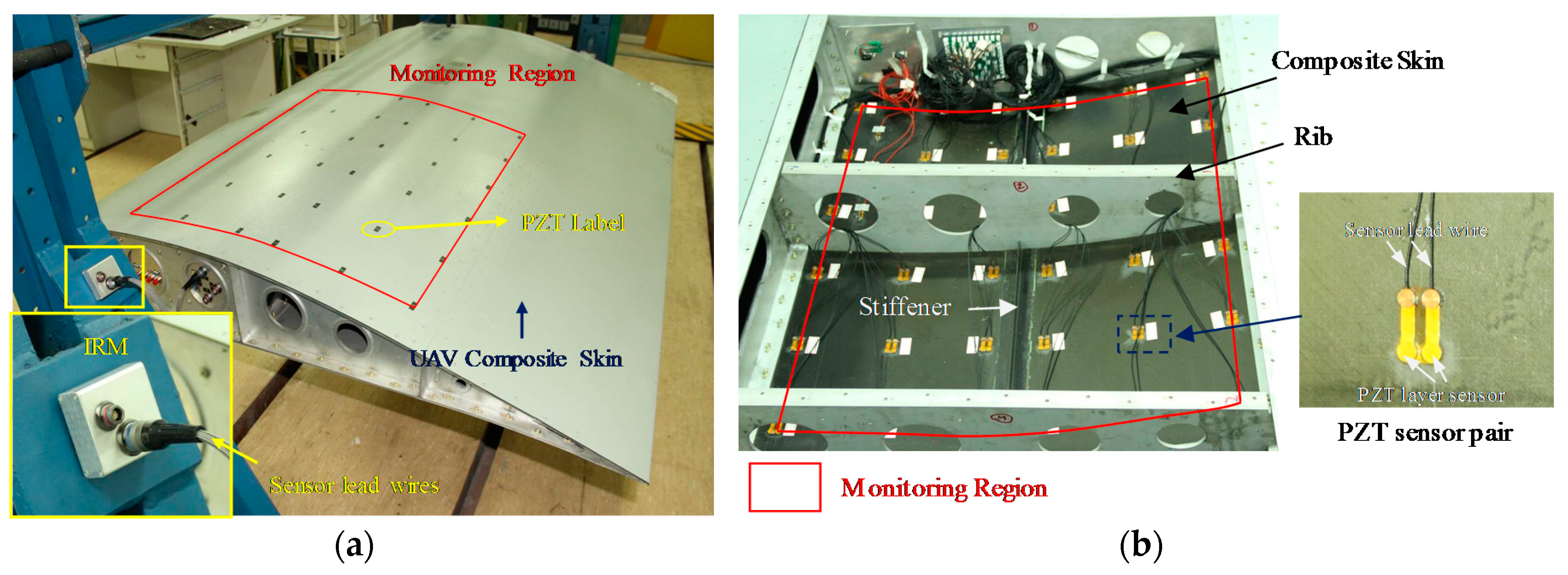
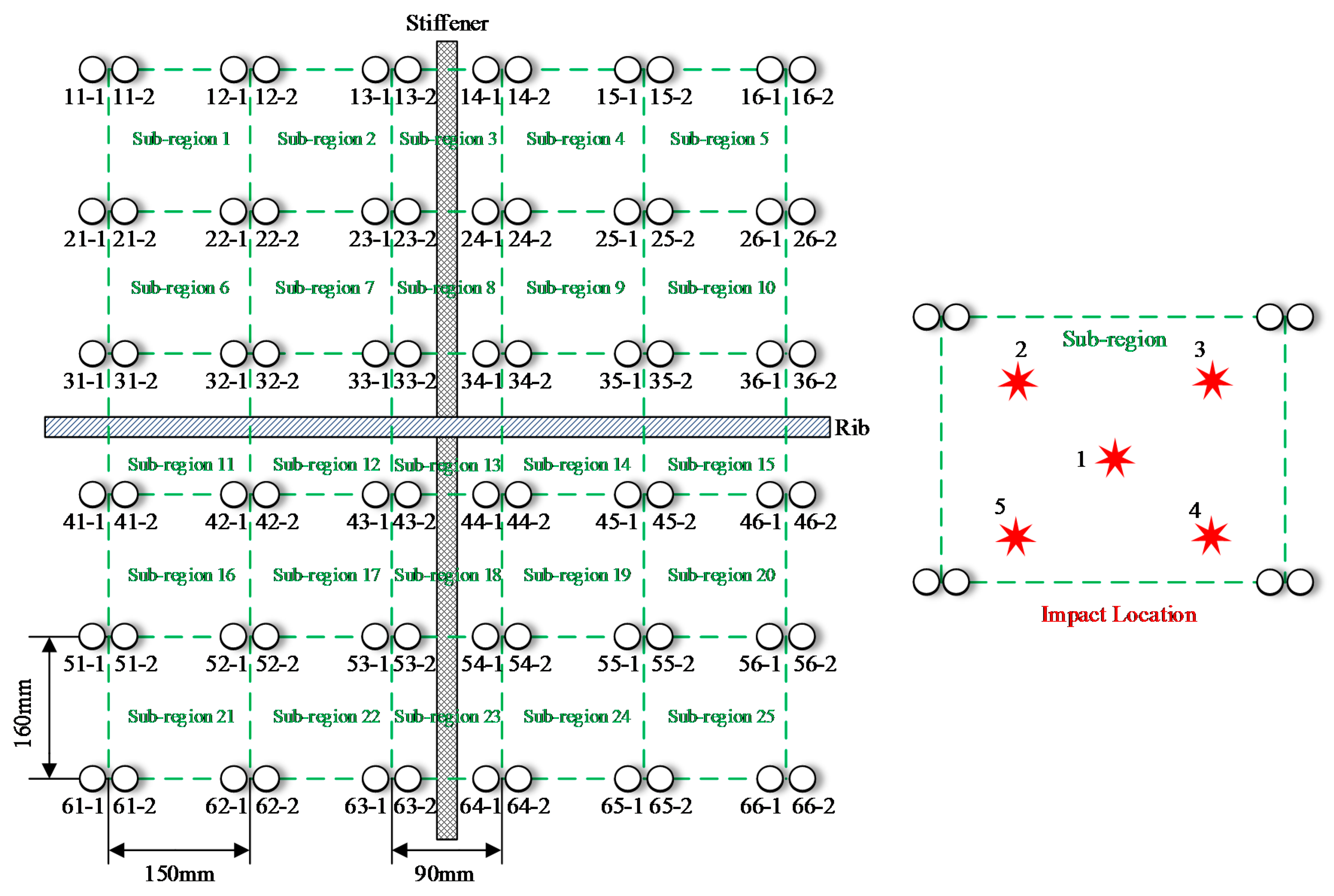
5. Validation on an UAV Composite Wing Box
6. Conclusions
- (1)
- Compared with the independent sensor connection, the continuous sensor connection will change the capacitance and impedance of the whole PZT sensor network. This effect may reduce the monitoring accuracy and efficiency of the lightweight sensor networks so that the scalability of the lightweight sensor networks is reduced. This point will be theoretically analyzed and experimentally studied in the ongoing work.
- (2)
- The accuracy of impact region localization methods on more real complex aircraft structures and under more complex noise environment will be further studied.
- (3)
- A large-scale and flexible lightweight sensor network will be developed based on the principle of flexible and stretchable sensors [34,35,36] and the method of how to integrate the large-scale lightweight sensor network with the aircraft composite skin will be studied so as to realize a real lightweight ASCS.
- (4)
- The IRM will be further improved so that it can be realized flexibly and can be integrated with the lightweight sensor network to be an integrated and lightweight impact monitoring network system.
- (5)
- Furthermore, the three kinds of lightweight sensor networks proposed by this paper are sparse PZT sensor networks. They can also be applicable to some strategies of active monitoring based on dense PZT sensor networks [22,37,38,39,40,41]. Therefore, more different types of PZT sensor network and the corresponding active monitoring strategies will be studied.
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| ASCS | Aircraft Smart Composite Skin |
| CDS | Characteristic Digital Sequence |
| CHSN | Continuous Heterogeneous Sensor Network |
| CPSN | Continuous Parallel Sensor Network |
| CSSN | Continuous Series Sensor Network |
| DR | Duration of the Rise of the characteristic digital sequence |
| EEPROM | Electrically Erasable Programmable Read Only Memory |
| EWF | Energy-Weighted Factor |
| FPGA | Field-Programmable Gate Array |
| IRM | Impact Region Monitor |
| NSN | Normal Sensor Network |
| OFRE | Order of the First Rising Edge of the characteristic digital sequences |
| PZT | Piezoelectric |
| SHM | Structural Health Monitoring |
| UAV | Unmanned Aerial Vehicle |
| PZT | Piezoelectric |
References
- McEvoy, M.A.; Correll, N. Materials that couple sensing, actuation, computation, and communication. Science 2015, 347, 1261689. [Google Scholar] [CrossRef] [PubMed]
- Guo, Y.; Li, Y.H.; Guo, Z.; Kim, K.; Chang, F.K.; Wang, S.X. Bio-inspired stretchable absolute pressure sensor network. Sensors 2016, 16, 55. [Google Scholar] [CrossRef] [PubMed]
- Gibson, R.F. A review of recent research on mechanics of multifunctional composite materials and structures. Compos. Struct. 2010, 92, 2793–2810. [Google Scholar] [CrossRef]
- Foote, P.D. Integration of structural health monitoring sensors with aerospace, composite materials and structures. Materialwiss. Werkst. 2015, 46, 197–203. [Google Scholar] [CrossRef]
- Yin, F.; Ye, D.; Zhu, C.; Lei, Q.; Huang, Y. Stretchable, Highly Durable Ternary Nanocomposite Strain Sensor for Structural Health Monitoring of Flexible Aircraft. Sensors 2017, 17, 2677. [Google Scholar] [CrossRef] [PubMed]
- Soutis, C. Carbon fiber reinforced plastics in aircraft construction. Mater. Sci. Eng. A 2005, 412, 171–176. [Google Scholar] [CrossRef]
- Marsh, G. Airbus A350 XWB update. Reinf. Plast. 2010, 54, 20–24. [Google Scholar] [CrossRef]
- Boeing 787 Dreamliner. Available online: http://widebodyaircraft.nl/b787.htm (accessed on 20 April 2018).
- Staszewski, W.J.; Mahzan, S.; Traynor, R. Health monitoring of aerospace composite structures–Active and passive approach. Compos. Sci. Technol. 2009, 69, 1678–1685. [Google Scholar] [CrossRef]
- Yang, F.J.; Cantwell, W.J. Impact damage initiation in composite materials. Compos. Sci. Technol. 2010, 70, 336–342. [Google Scholar] [CrossRef]
- ARP6461, S.A.E. Guidelines for Implementation of Structural Health Monitoring on Fixed Wing Aircraft; Society of Automotive Engineers: Warrendale, PA, USA, 2013. [Google Scholar]
- Park, J.; Ha, S.; Chang, F.K. Monitoring impact events using a system-identification method. AIAA J. 2009, 47, 2011–2021. [Google Scholar] [CrossRef]
- Qiu, L.; Yuan, S.; Zhang, X.; Wang, Y. A time reversal focusing based impact imaging method and its evaluation on complex composite structures. Smart Mater. Struct. 2011, 20, 105014. [Google Scholar] [CrossRef]
- Ciampa, F.; Meo, M. Impact detection in anisotropic materials using a time reversal approach. Struct. Health Monit. 2012, 11, 43–49. [Google Scholar] [CrossRef] [Green Version]
- Park, B.; Sohn, H.; Olson, S.E.; DeSimio, M.P.; Brown, K.S.; Derriso, M.M. Impact localization in complex structures using laser-based time reversal. Struct. Health Monit. 2012, 11, 577–588. [Google Scholar] [CrossRef]
- Chen, C.; Li, Y.; Yuan, F.G. Impact source identification in finite isotropic plates using a time-reversal method: Experimental study. Smart Mater. Struct. 2012, 21, 105025. [Google Scholar] [CrossRef]
- Zhong, Y.; Yuan, S.; Qiu, L. Multi-impact source localisation on aircraft composite structure using uniform linear PZT sensors array. Struct. Infrastruct. Eng. 2015, 11, 310–320. [Google Scholar] [CrossRef]
- Si, L.; Baier, H. Real-time impact visualization inspection of aerospace composite structures with distributed sensors. Sensors 2015, 15, 16536–16556. [Google Scholar] [CrossRef] [PubMed]
- Merlo, E.M.; Bulletti, A.; Giannelli, P.; Calzolai, M.; Capineri, L. A Novel Differential Time-of-Arrival Estimation Technique for Impact Localization on Carbon Fiber Laminate Sheets. Sensors 2017, 17, 2270. [Google Scholar] [CrossRef] [PubMed]
- Zhu, J.; Parvasi, S.M.; Ho, S.C.M.; Patil, D.; Ge, M.; Li, H.; Song, G. An innovative method for automatic determination of time of arrival for Lamb waves excited by impact events. Smart Mater. Struct. 2017, 26, 055013. [Google Scholar] [CrossRef]
- Huo, L.; Li, X.; Chen, D.; Li, H.; Song, G. Identification of the impact direction using the beat signals detected by piezoceramic sensors. Smart Mater. Struct. 2017, 26, 085020. [Google Scholar] [CrossRef]
- Ren, Y.; Qiu, L.; Yuan, S.; Su, Z. A diagnostic imaging approach for online characterization of multi-impact in aircraft composite structures based on a scanning spatial-wavenumber filter of guided wave. Mech. Syst. Signal Process. 2017, 90, 44–63. [Google Scholar] [CrossRef]
- Qiu, L.; Yuan, S. On development of a multi-channel PZT array scanning system and it’s evaluating application on UAV wing box. Sens. Actuators A Phys. 2009, 151, 220–230. [Google Scholar] [CrossRef]
- Wang, Q.; Hong, M.; Su, Z. An in-situ structural health diagnosis technique and its realization via a modularized system. IEEE Trans. Instrum. Meas. 2015, 64, 873–887. [Google Scholar] [CrossRef]
- Hardware-Acellent Technologies, Inc. Available online: http://www.acellent.com/en/hardware/ (accessed on 7 April 2018).
- Mitra, M.; Gopalakrishnan, S. Guided wave based structural health monitoring: A review. Smart Mater. Struct. 2016, 25, 053001. [Google Scholar] [CrossRef]
- Yuan, S.; Liu, P.; Qiu, L. A miniaturized composite impact monitor and its evaluation research. Sens. Actuators A Phys. 2012, 184, 182–192. [Google Scholar] [CrossRef]
- Liu, P.; Yuan, S.; Qiu, L. Development of a PZT-based wireless digital monitor for composite impact monitoring. Smart Mater. Struct. 2012, 21, 035018. [Google Scholar] [CrossRef]
- Qiu, L.; Yuan, S.; Liu, P.; Qian, W. Design of an all-digital impact monitoring system for large-scale composite structures. IEEE Trans. Instrum. Meas. 2013, 62, 1990–2002. [Google Scholar] [CrossRef]
- Qiu, L.; Yuan, S.; Mei, H.; Qian, W. Digital sequences and a time reversal-based impact region imaging and localization method. Sensors 2013, 13, 13356–13381. [Google Scholar] [CrossRef] [PubMed]
- Kirikera, G.R.; Shinde, V.; Schulz, M.J.; Ghoshal, A.; Sundaresan, M.; Allemang, R. Damage localisation in composite and metallic structures using a structural neural system and simulated acoustic emissions. Mech. Syst. Signal Process. 2007, 21, 280–297. [Google Scholar] [CrossRef]
- Kirikera, G.R.; Shinde, V.; Schulz, M.J.; Ghoshal, A.; Sundaresan, M.J.; Allemang, R.J.; Lee, J.W. A structural neural system for real-time health monitoring of composite materials. Struct. Health Monit. 2008, 7, 65–83. [Google Scholar] [CrossRef]
- Yuan, S.; Ren, Y.; Qiu, L.; Mei, H. A multi-response-based wireless impact monitoring network for aircraft composite structures. IEEE Trans. Ind. Electron. 2016, 63, 7712–7722. [Google Scholar] [CrossRef]
- Qiu, L.; Yuan, S.; Shi, X.; Huang, T. Design of piezoelectric transducer layer with electromagnetic shielding and high connection reliability. Smart Mater. Struct. 2012, 21, 075032. [Google Scholar] [CrossRef]
- Huang, Y.; Ding, Y.; Bian, J.; Su, Y.; Zhou, J.; Duan, Y.; Zhou, Y. Hyper-stretchable self-powered sensors based on electrohydrodynamically printed, self-similar piezoelectric nano/microfibers. Nano Energy 2017, 40, 432–439. [Google Scholar] [CrossRef]
- Liu, M.; Zeng, Z.; Xu, H.; Liao, Y.; Zhou, L.; Zhang, Z.; Su, Z. Ultra-broadband frequency responsive sensor based on lightweight and flexible carbon nanostructured polymeric nanocomposites. Carbon 2017, 121, 490–501. [Google Scholar]
- Rajagopalan, J.; Balasubramaniam, K.; Krishnamurthy, C.V. A single transmitter multi-receiver (STMR) PZT array for guided ultrasonic wave based structural health monitoring of large isotropic plate structures. Smart Mater. Struct. 2006, 15, 1190. [Google Scholar] [CrossRef]
- Giridhara, G.; Rathod, V.T.; Naik, S.; Mahapatra, D.R.; Gopalakrishnan, S. Rapid localization of damage using a circular sensor array and Lamb wave based triangulation. Mech. Syst. Signal Process. 2010, 24, 2929–2946. [Google Scholar] [CrossRef]
- Rathod, V.T.; Mahapatra, D.R. Ultrasonic Lamb wave based monitoring of corrosion type of damage in plate using a circular array of piezoelectric transducers. NDT E Int. 2011, 44, 628–636. [Google Scholar] [CrossRef]
- Li, F.; Peng, H.; Meng, G. Quantitative damage image construction in plate structures using a circular PZT array and lamb waves. Sens. Actuators A Phys. 2014, 214, 66–73. [Google Scholar] [CrossRef]
- Ambroziński, Ł.; Stepinski, T.; Uhl, T. Efficient tool for designing 2D phased arrays in lamb waves imaging of isotropic structures. J. Intell. Mater. Syst. Struct. 2015, 26, 2283–2294. [Google Scholar] [CrossRef]

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Connection Type | PZT Number | Capacitance (nF) |
|---|---|---|
| Independent Sensor | Single PZT sensor (PZT3) | 1.60 |
| Single PZT sensor (PZT6) | 1.55 | |
| Single PZT sensor (PZT9) | 1.58 | |
| Series connection | Two PZT sensors (PZT3, PZT6) | 0.90 |
| Three PZT sensors (PZT3, PZT6, PZT9) | 0.70 | |
| Parallel connection | Two PZT sensors (PZT3, PZT6) | 2.55 |
| Three PZT sensors (PZT3, PZT6, PZT9) | 3.55 |
| Network Size | Network Type | Number of Sensors | Number of Channels |
|---|---|---|---|
| 3 × 3 | NSN | 9 | 9 |
| CSSN | 18 | 6 | |
| CPSN | 18 | 6 | |
| CHSN | 9 | 5 | |
| 5 × 5 | NSN | 25 | 25 |
| CSSN | 50 | 10 | |
| CPSN | 50 | 10 | |
| CHSN | 25 | 13 | |
| 10 × 10 | NSN | 100 | 100 |
| CSSN | 200 | 20 | |
| CPSN | 200 | 20 | |
| CHSN | 100 | 55 | |
| M × N | NSN | M × N | M × N |
| CSSN | 2 × M × N | M + N | |
| CPSN | 2 × M × N | M + N | |
| CHSN | M × N | (M × N + N)/2, N is even | |
| (M × N − M + N + 1)/2, N is odd |
| Impact Energy Level | Network Type | Impact Times | Correct Times | Accuracy Rate |
|---|---|---|---|---|
| 1 | CSSN | 225 | 214 | 95.1% |
| CPSN | 225 | 210 | 93.3% | |
| CHSN | 225 | 218 | 96.9% | |
| 2 | CSSN | 225 | 221 | 98.2% |
| CPSN | 225 | 220 | 97.8% | |
| CHSN | 225 | 224 | 99.6% | |
| 3 | CSSN | 225 | 222 | 98.7% |
| CPSN | 225 | 217 | 96.4% | |
| CHSN | 225 | 224 | 99.6% |
| Impact Energy Level | Network Type | Impact Times | Correct Times | Accuracy Rate |
|---|---|---|---|---|
| 1 | CSSN | 625 | 583 | 93.3% |
| CPSN | 625 | 575 | 92.0% | |
| CHSN | 625 | 591 | 94.6% | |
| 2 | CSSN | 625 | 589 | 94.2% |
| CPSN | 625 | 582 | 93.1% | |
| CHSN | 625 | 595 | 95.2% | |
| 3 | CSSN | 625 | 590 | 94.4% |
| CPSN | 625 | 581 | 93.0% | |
| CHSN | 625 | 593 | 94.9% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiu, L.; Deng, X.; Yuan, S.; Huang, Y.; Ren, Y. Impact Monitoring for Aircraft Smart Composite Skins Based on a Lightweight Sensor Network and Characteristic Digital Sequences. Sensors 2018, 18, 2218. https://doi.org/10.3390/s18072218
Qiu L, Deng X, Yuan S, Huang Y, Ren Y. Impact Monitoring for Aircraft Smart Composite Skins Based on a Lightweight Sensor Network and Characteristic Digital Sequences. Sensors. 2018; 18(7):2218. https://doi.org/10.3390/s18072218
Chicago/Turabian StyleQiu, Lei, Xiaolei Deng, Shenfang Yuan, YongAn Huang, and Yuanqiang Ren. 2018. "Impact Monitoring for Aircraft Smart Composite Skins Based on a Lightweight Sensor Network and Characteristic Digital Sequences" Sensors 18, no. 7: 2218. https://doi.org/10.3390/s18072218
APA StyleQiu, L., Deng, X., Yuan, S., Huang, Y., & Ren, Y. (2018). Impact Monitoring for Aircraft Smart Composite Skins Based on a Lightweight Sensor Network and Characteristic Digital Sequences. Sensors, 18(7), 2218. https://doi.org/10.3390/s18072218