Smart Environmental Monitoring and Assessment Technologies (SEMAT)—A New Paradigm for Low-Cost, Remote Aquatic Environmental Monitoring


Abstract
:1. Introduction
2. Developing Low-Cost, Remote Aquatic Environmental Monitoring Systems
2.1. Problem Motivation and Related Work

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Research Initiative | Location |
|---|---|
| IMOS (Integrated Marine Observing System) [13] | Tasmania, Australia |
| GBROOS (Great Barrier Reef Oceanic Observation System) [14] | Great Barrier Reef, Queensland, Australia |
| LakeNet [15] | St. Mary’s Lake, USA |
| OceanSense [16] | Coastal waters of China |
| Klimat [17] | Baltic Sea, Sweden |
| SmartCoast [18] | River Lee, Cork, UK |
| ReCON (Real-time Coastal Observation Network) [19] | Lakes Michigan, Huron, Erie, USA |
| GLUCOS (Great Lakes Urban Coastal Observing System) [20] | Lake Michigan, USA |
2.2. SEMAT’s Design Goals (Revisited)
- Application-driven deployments and reporting—Data is collected for scientific study purposes and for client-oriented needs such as validation of compliances or standards in water quality; not just for the sake of collecting data. Deployments and data collection are driven by an underlying application where the data informs the user and provides measures of condition or performance relevant to the end-user;
- Low Cost—By utilising suitable “off-the-shelf” elements and an innovative approach to device production, the aim is to deliver a robust sensor network system which is significantly under 40% of the cost of similar existing systems on the market;
- Minimal deployment expertise—A buoy must be easily deployable without requiring any onsite configuration and specialist equipment and can ideally be done by a single person (e.g., the buoy can be deployed and its operation immediately checked via a smart phone);
- The ability to adapt and evolve—The SEMAT system design must be able to evolve with enhancements in technology and community needs. Through modularisation and an adaptable architecture, the core system can be modified ongoing to meet user requirements.
- Remote interface, data management and analysis tools—The SEMAT system needs to provide a user interface, backend data management and set of simple, yet powerful tools for an end user to view and manipulate the data and monitor/manage the system;
- Robustness/durability—A buoy needs to be robust enough to withstand harsh conditions without failures over an extended period of deployment (e.g., heavy rain, waves, strong current, hail, boat strikes, fish/bird attacks, bio-fouling, submersion, etc.);
- Transferability/sustainability of product—The SEMAT development and production model must continue to move forward rather than stop after a specific project/deployment, or be larger than a single individual; and
- Small environmental footprint—The buoy must be constructed using the minimal possible resources and ideally most components can be recycled/reused once a deployment is over. A buoy must not negatively impact on the environment around it in which the buoy is deployed (e.g., toxic glues/paints or materials being left behind post deployment).
2.3. The Need for an Open Standard for Constructing Environmental Monitoring Systems
- Data Application and Modelling (environmental and mathematical);
- Application programming (user interface, data and content management, algorithms);
- Systems programming (networking/communications, hardware-level details);
- Electrical Engineering/Physics (electronics and sensor development); and
- Field/Deployment (experience in marine hardening systems, testing and deployment).
2.4. Engaging the Community in Production and Education through Social Enterprise
3. An Open Standard System for Low-Cost, Remote Aquatic Environmental Monitoring
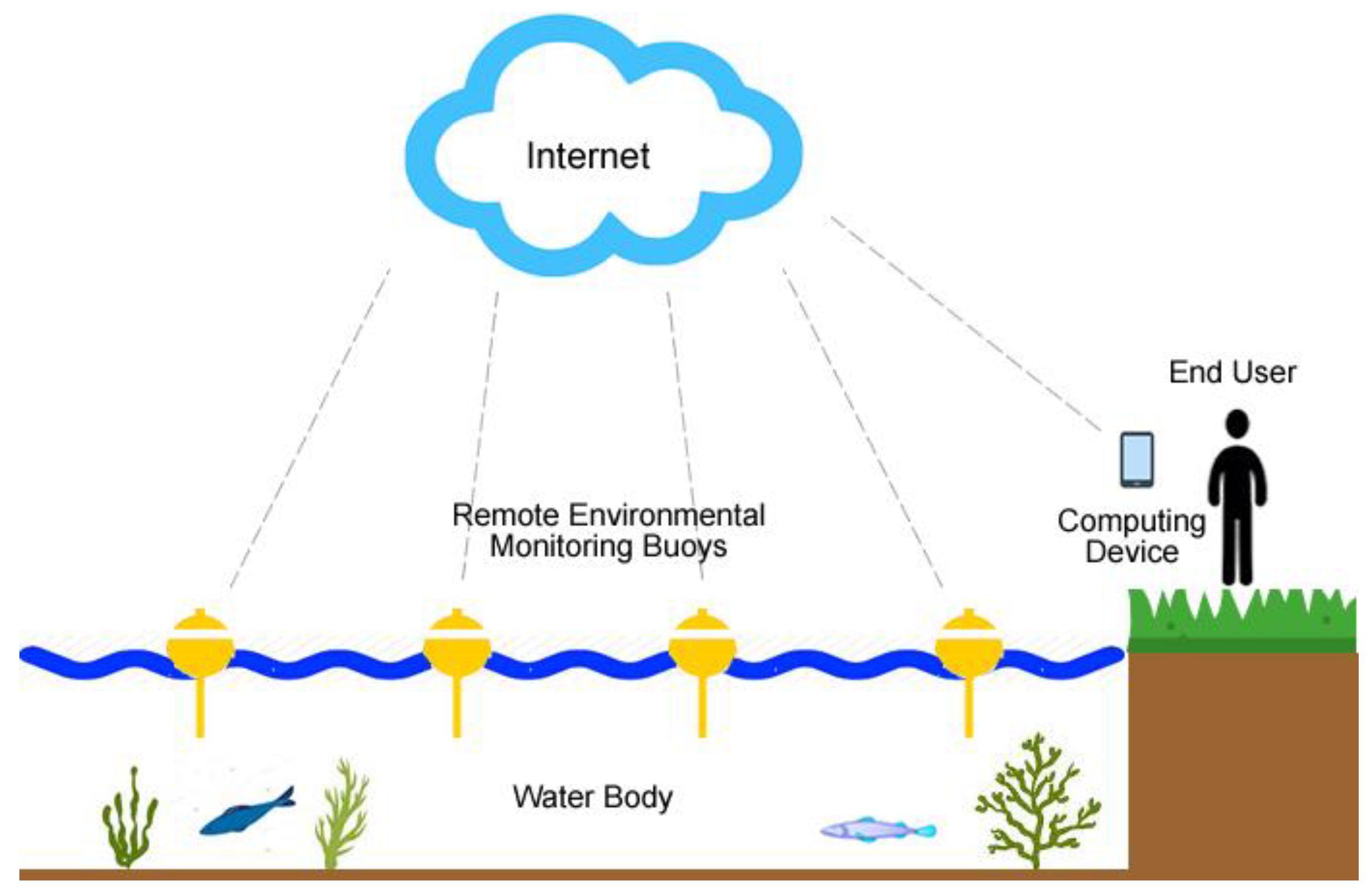
3.1. System Architecture
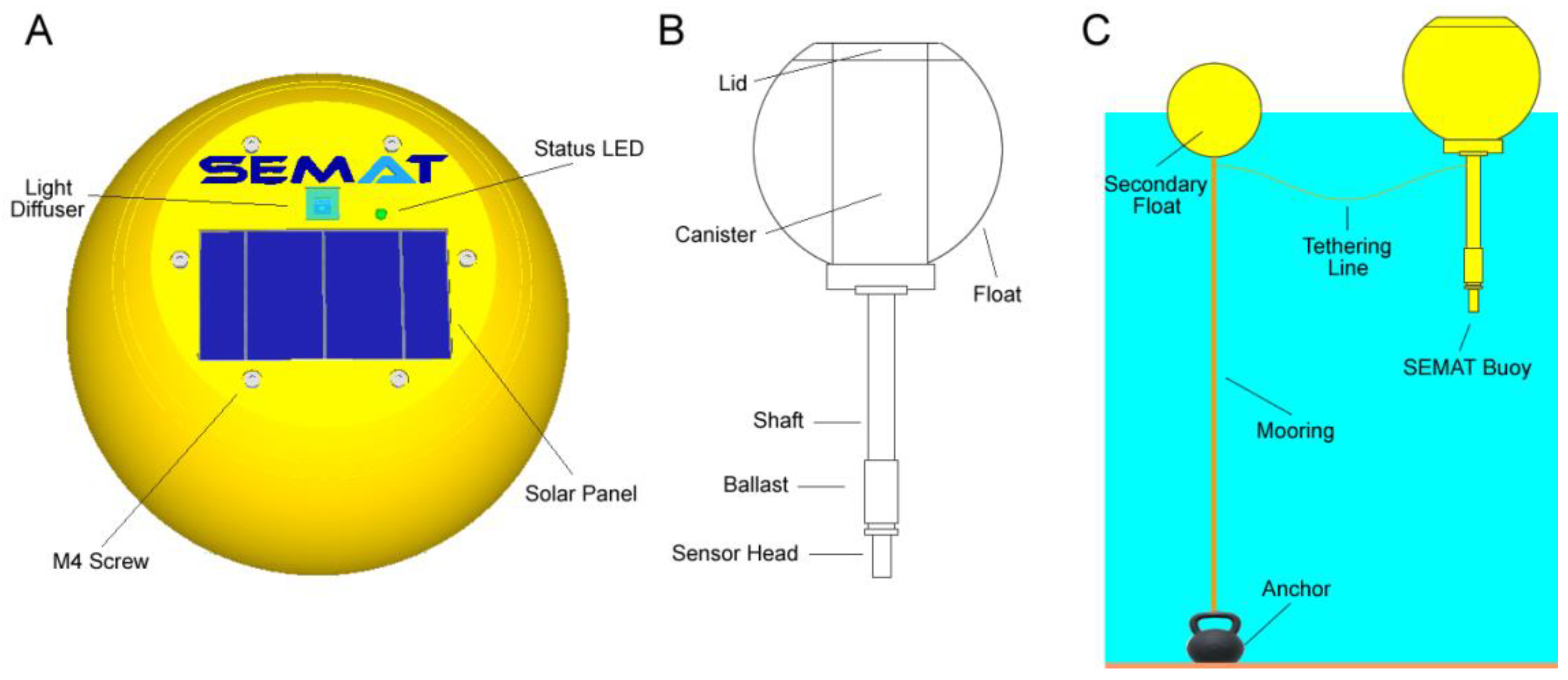
3.2. Physical Components of a SEMAT Buoy
- Float—provides the main buoyancy and physical structure of the buoy;
- Lid—seals the canister and houses above water sensors, solar panels and status LED;
- Canister—houses the internal electronics components and provides additional buoyancy;
- Shaft—extends from the canister below water to connect the sensor head;
- Ballast—provides weighting to ensure the buoy maintains upright positioning in the water;
- Sensor Head—houses the underwater sensors; and
- Mooring and Anchor—tethers the buoy in position in a water body.
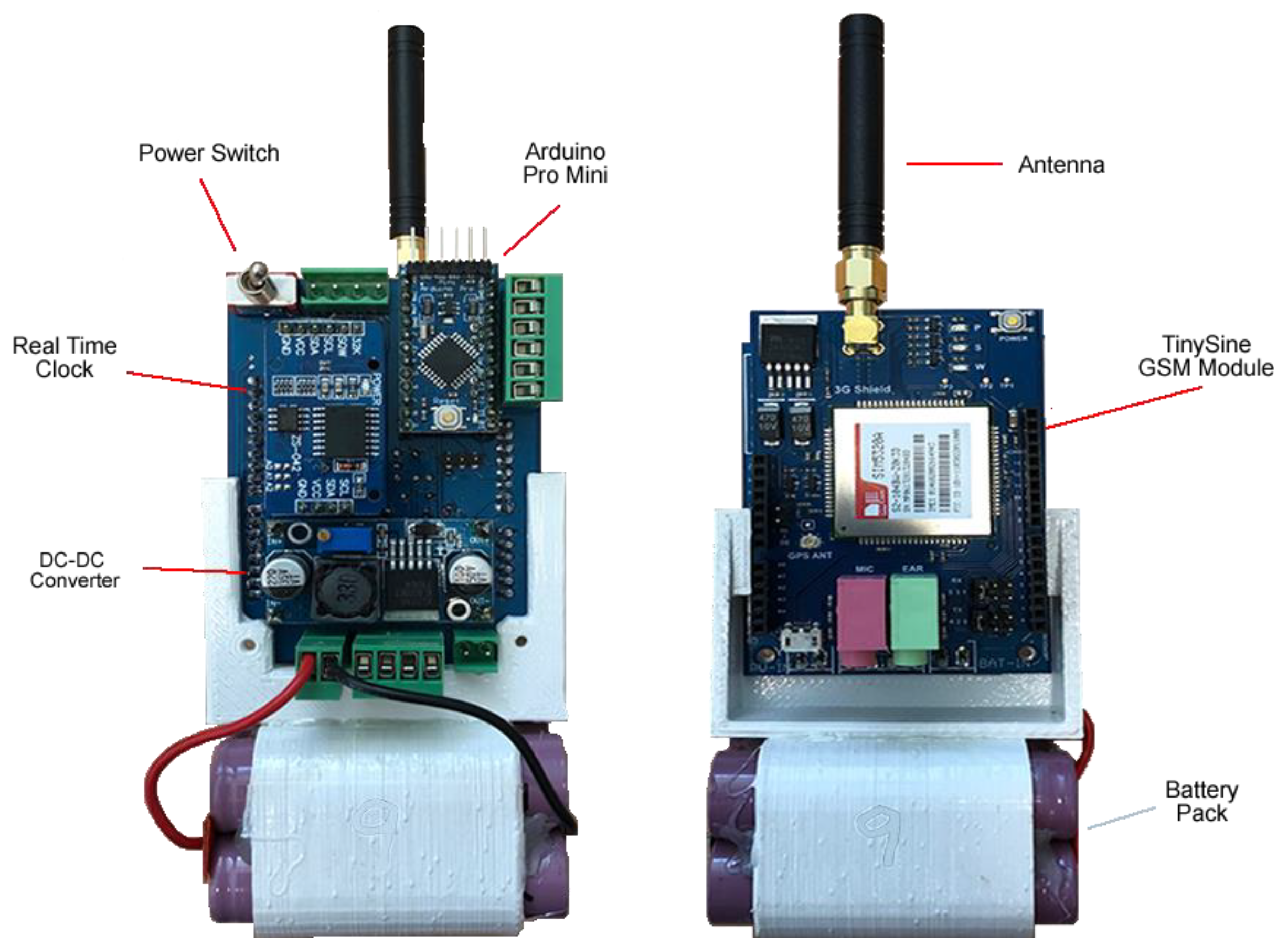
3.3. Electronics Subsystems of a SEMAT Buoy
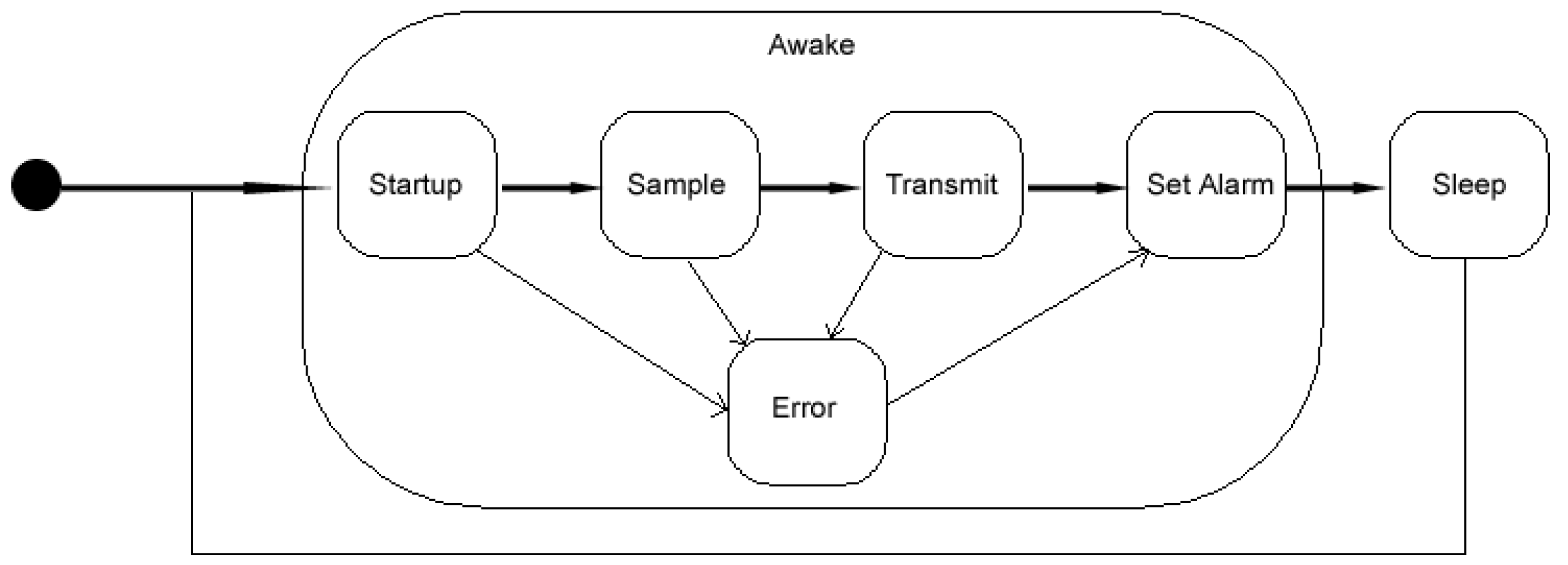
3.3.1. Microcontroller Subsystem
3.3.2. Power Subsystem
3.3.3. Solar Charging Subsystem
3.3.4. Timing Subsystem
- A Real Time Clock (RTC) located on the buoy;
- Obtaining the time from the GSM network; and
- The time on the backend server database when a transmission is received.
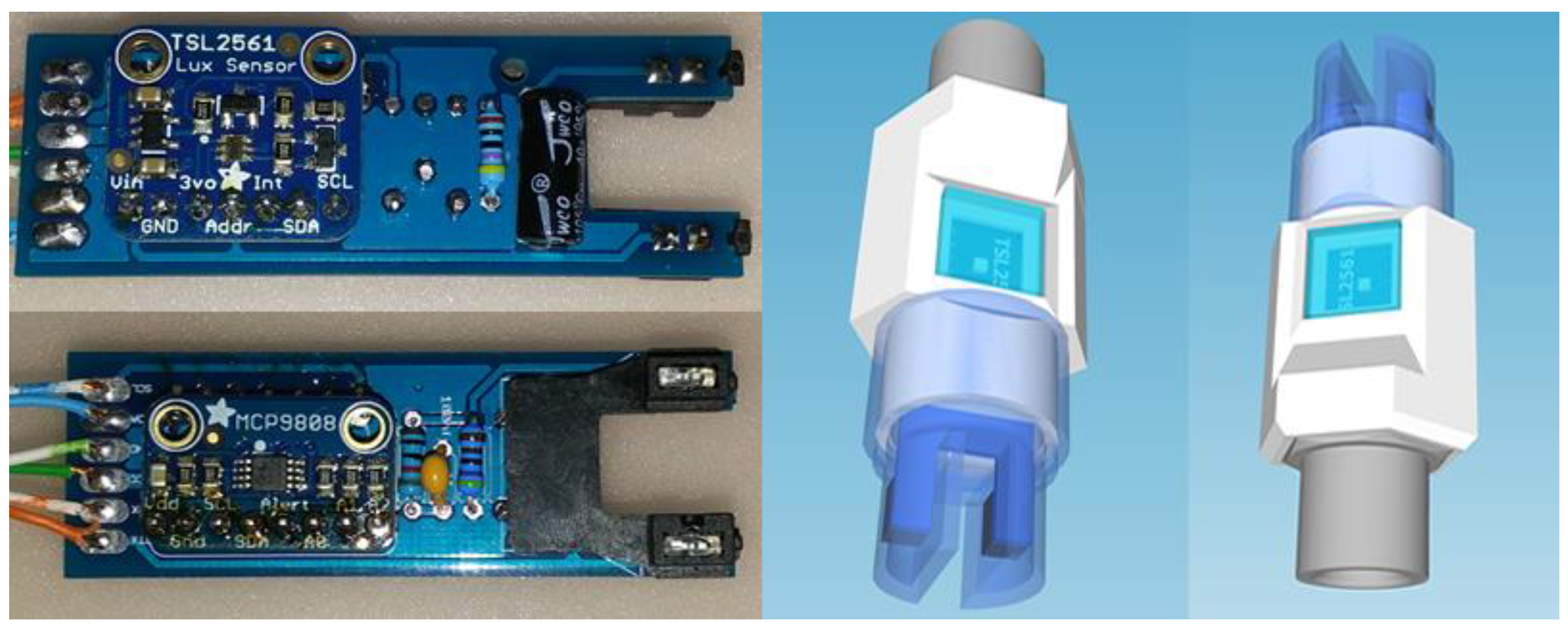
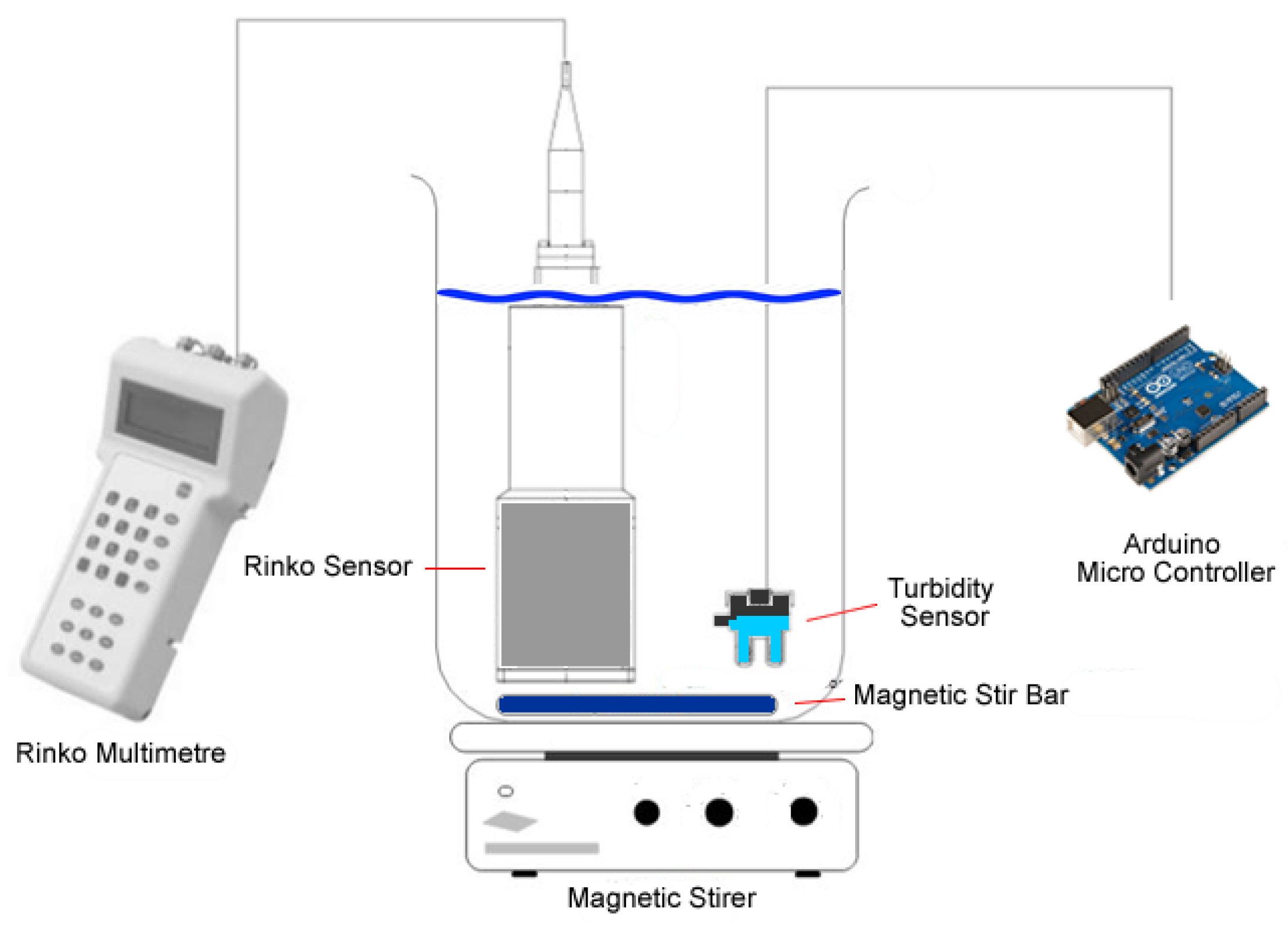
3.3.5. Sensor Subsystem
3.3.6. Communications Subsystem
3.3.7. Cleaning Subsystem
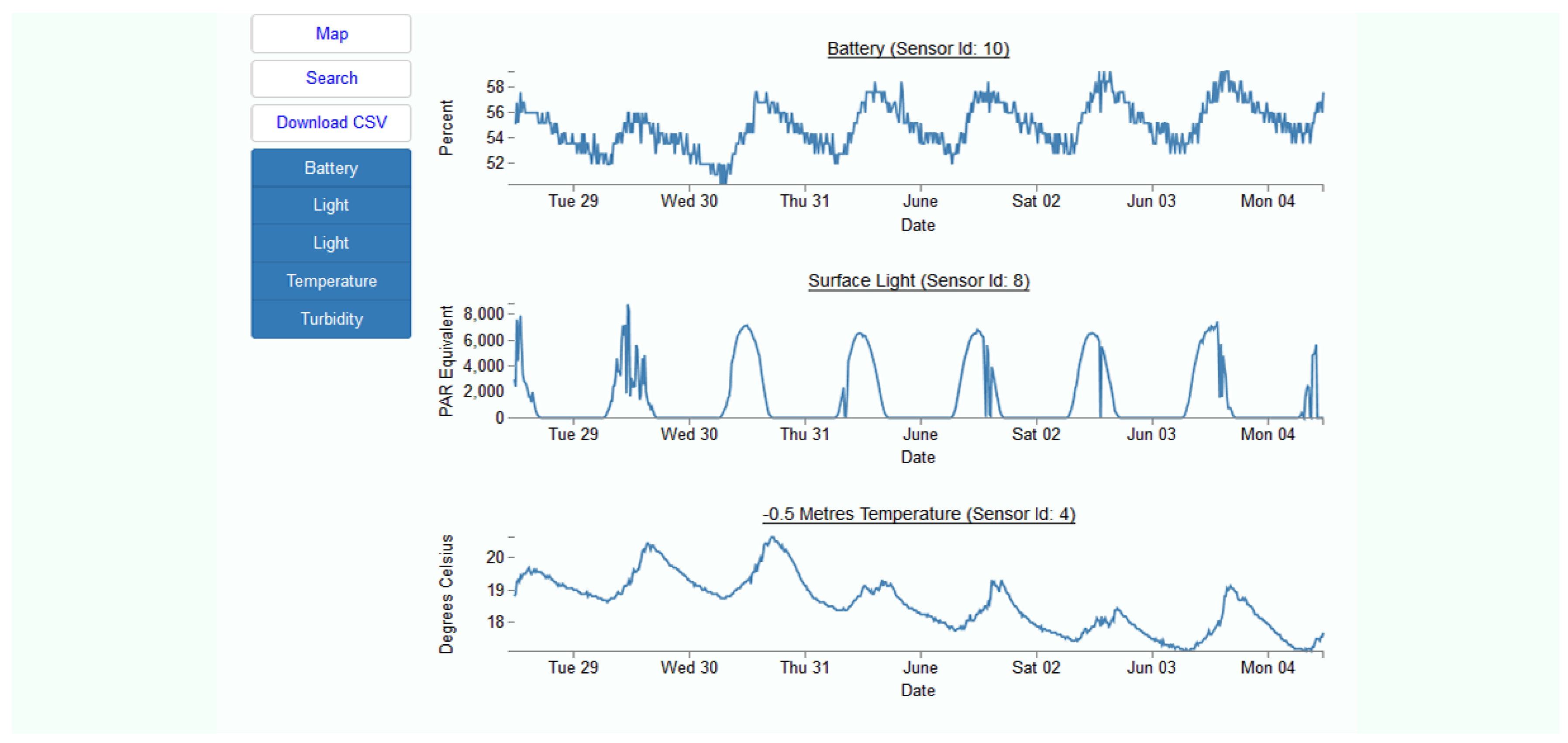
3.4. User Interface
4. Environmental Study and Field Test Deployments
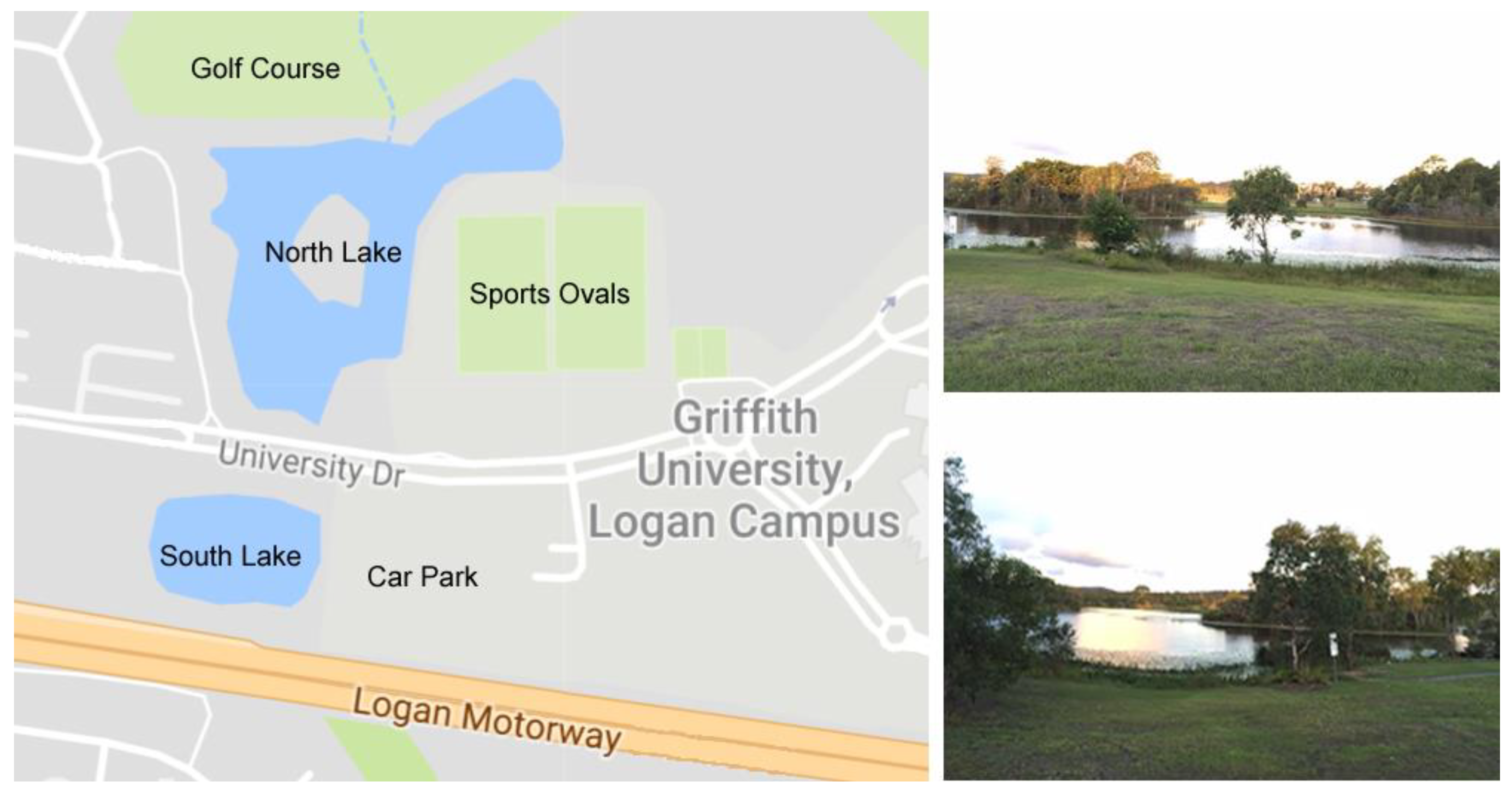
4.1. Lake Ellerslie
- To filter sediment and contaminants from the motorway and surrounds; and
- To relieve and redirect flooding from Slacks Creek.
- Accessibility/Convenience—The lake is part of Griffith University Logan Campus. No permits (beyond university approval) are required.
- 3G Coverage—The lake is within range of 3G, therefore remote monitoring of the lake can occur without using additional network infrastructure.
- Low-Cost—As no travel is involved, it is relatively inexpensive to deploy and monitor SEMAT buoys.
- Unstudied—Since the lake was constructed throughout 1995–2002, there have been no comprehensive documented studies of the site. (Except for an out dated Masters research dissertation of the south lake from 1999 [38].)
4.2. Deployment and Environmental Study Results
4.3. Evaluation of the Deployments and System Against SEMAT’s Revised Design Goals
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- World Health Organization. Guidelines for Drinking-Water Quality; World Health Organization: Geneva, Switzerland, 2004; Volume 1. [Google Scholar]
- Hamilton, G.S.; Fielding, F.; Chiffings, A.; Hart, B.T.; Johnstone, R.W.; Mengersen, K.R. Investigating the use of a Bayesian Network to Model the Risk of Lyngbya majuscula Bloom Initiation in Deception Bay, Queensland, Australia. Hum. Ecol. Risk Assess. 2007, 13, 1271–1287. [Google Scholar] [CrossRef] [Green Version]
- Lovett, G.M.; Burns, D.A.; Driscoll, C.T.; Jenkins, J.C.; Mitchell, M.J.; Rustad, L.; Haeuber, R. Who needs environmental monitoring? Front. Ecol. Environ. 2007, 5, 253–260. [Google Scholar] [CrossRef]
- Salvatore, M.; McCabe, M.F.; Miller, P.E.; Lucas, R.; Madrigal, V.P.; Mallinis, G.; Dor, E.B. On the Use of Unmanned Aerial Systems for Environmental Monitoring. Remote Sens. 2018, 10, 641. [Google Scholar] [CrossRef]
- Johnstone, R.; Caputo, D.; Cella, U.; Gandelli, A.; Alippi, C.; Grimaccia, F.; Zich, R.E. Smart Environmental Measurement & Analysis Technologies (SEMAT): Wireless sensor networks in the marine environment. In Proceedings of the Wireless Sensor and Actuator Network Research on Opposite Sides of the Globe (SENSEI), Stockholm, Sweden, 9 June 2008. [Google Scholar]
- Alippi, C.; Camplani, R.; Galperti, C.; Roveri, M. A robust, adaptive, solar-powered WSN framework for aquatic environmental monitoring. IEEE Sens. J. 2011, 11, 45–55. [Google Scholar] [CrossRef]
- Trevathan, J.; Atkinson, I.; Read, W.; Bajema, N.; Lee, Y.J.; Scarr, A.; Johnstone, R. Developing low-cost intelligent wireless sensor networks for aquatic environments. In Proceedings of the 2010 Sixth International Conference on Intelligent Sensors, Sensor Networks and Information Processing (ISSNIP), Brisbane, QLD, Australia, 7–10 December 2010; pp. 13–18. [Google Scholar]
- Trevathan, J.; Johnstone, R.; Chiffings, T.; Atkinson, I.; Bergmann, N.; Read, W.; Stevens, T. SEMAT—The next generation of inexpensive marine environmental monitoring and measurement systems. Sensors 2012, 12, 9711–9748. [Google Scholar] [CrossRef] [PubMed]
- Sadler, J.M.; Ames, D.P.; Khattar, R. A recipe for standards-based data sharing using open source software and low-cost electronics. J. Hydroinform. 2015, 20, jh2015092. [Google Scholar] [CrossRef]
- Website: The Cave Pearl Project. Available online: https://edwardmallon.wordpress.com/about/about-me/ (accessed on 11 October 2017).
- Cucchiella, F.; D’Adamo, I.; Gastaldi, M.; Koh, S.L.; Rosa, P. A comparison of environmental and energetic performance of European countries: A sustainability index. Renew. Sustain. Energy Rev. 2017, 78, 401–413. [Google Scholar] [CrossRef]
- Albaladejo, C.; Sánchez, P.; Iborra, A.; Soto, F.; López, J.A.; Torres, R. Wireless sensor networks for oceanographic monitoring: A systematic review. Sensors 2010, 10, 6948–6968. [Google Scholar] [CrossRef] [PubMed]
- Hill, K.; Moltmann, T.; Proctor, R.; Allen, S. The Australian Integrated Marine Observing System: Delivering data streams to address national and international research priorities. Mar. Technol. Soc. J. 2010, 44, 65–72. [Google Scholar] [CrossRef]
- Bainbridge, S.; Steinberg, C.; Furnas, M. GBROOS—An ocean observing system for the Great Barrier Reef. In Proceedings of the 11th International Coral Reef Symposium, Fort Lauderdale, FL, USA, 7–11 July 2008; National Coral Reef Institute, Nova Southeastern University: Fort Lauderdale, FL, USA, 2010; pp. 529–533. [Google Scholar]
- Seders, L.A.; Shea, C.A.; Lemmon, M.D.; Maurice, P.A.; Talley, J.W. LakeNet: An integrated sensor network for environmental sensing in Lakes. Environ. Eng. Sci. 2007, 24, 183–191. [Google Scholar] [CrossRef]
- Guo, Z.; Hong, F.; Feng, H.; Chen, P.; Yang, X.; Jiang, M. OceanSense: Sensor Network of Realtime Ocean Environmental Data Observation and Its Development Platform. In Proceedings of the 3rd ACM International Workshop on UnderWater Networks, San Francisco, CA, USA, 15 September 2008; pp. 101–105. [Google Scholar]
- Voigt, T.; Osterlind, F.; Finne, N.; Tsiftes, N.; He, Z.T.; Eriksson, J.; Dunkels, A.; Bamstedt, U.; Schiller, J.; Hjort, K. Sensor Networking in Aquatic Environments: Experiences and New Challenges. In Proceedings of the 32nd IEEE Conference on Local Computer Networks, Dublin, Ireland, 15–18 October 2007; pp. 793–798. [Google Scholar]
- O’Flynn, B.; Bellis, S.; Mahmood, K.; Morris, M.; Duffy, G.; Delaney, K.; O’Mathuna, C. A 3D miniaturised programmable transceiver. Microelectron. Int. 2005, 22, 8–12. [Google Scholar] [CrossRef]
- Ruberg, S.A.; Muzzi, R.W.; Brandt, S.B.; Lane, J.C.; Miller, T.C.; Gray, J.J.; Constant, S.A.; Downing, E.J. A Wireless Internet-Based Observatory: The Real-time Coastal Observation Network (ReCON). In Proceedings of the IEEE Conference OCEANS, Vancouver, BC, Canada, 29 September–4 October 2007; pp. 1–6. [Google Scholar]
- Consi, T.R.; Anderson, G.; Barske, G.; Bootsma, H.; Hansen, T.; Janssen, J.; Klump, V.; Paddock, R.; Szmania, D.; Verhein, K.; et al. Real time observation of the thermal bar and spring stratification of Lake Michigan with the GLUCOS coastal observatory. In Proceedings of the IEEE Conference OCEANS, Quebec, QC, Canada, 15–18 September 2008; pp. 1–9. [Google Scholar]
- Akyildiz, I.F.; Su, W.; Sankarasubramaniam, Y.; Cayirci, E. Wireless sensor networks: A survey. Comput. Netw. 2002, 38, 393–422. [Google Scholar] [CrossRef]
- Oliveira, L.M.; Rodrigues, J.J. Wireless Sensor Networks: A Survey on Environmental Monitoring. JCM 2011, 6, 143–151. [Google Scholar] [CrossRef]
- Atzori, L.; Iera, A.; Morabito, G. The Internet of Things: A survey. Comput. Netw. 2010, 54, 2787–2805. [Google Scholar] [CrossRef]
- Website: AXYS Technologies. Available online: www.axystechnologies.com (accessed on 8 March 2018).
- Website: Fondriest Environmental. Available online: www.fondriest.com (accessed on 8 March 2018).
- Website: Aanderaa. Available online: www.aanderaa.com (accessed on 8 March 2018).
- Website: Fugro. Available online: www.fugro.com (accessed on 8 March 2018).
- Website: Aridea. Available online: www.the-iot-marketplace.com/libelium-aridea-offshore-buoy-kit (accessed on 8 March 2018).
- Hanington, P.; Rose, A.; Johnstone, R. The potential of benthic iron and phosphorus fluxes to support the growth of a bloom forming toxic cyanobacterium Lyngbya majuscula, Moreton Bay, Australia. Mar. Freshw. Res. 2016, 67, 1918–1927. [Google Scholar] [CrossRef]
- Albaladejo, C.; Soto, F.; Torres, R.; Sánchez, P.; López, J.A. A low-cost sensor buoy system for monitoring shallow marine environments. Sensors 2012, 12, 9613–9634. [Google Scholar] [CrossRef] [PubMed]
- Lockridge, G.; Dzwonkowski, B.; Nelson, R.; Powers, S. Development of a low-cost Arduino-based sonde for coastal applications. Sensors 2016, 16, 528. [Google Scholar] [CrossRef] [PubMed]
- Bergmann, N.W.; Juergens, J.; Hou, L.; Wang, Y.; Trevathan, J. Wireless underwater power and data transfer. In Proceedings of the 38th Conference on Local Computer Networks Workshops (LCN Workshops), Sydney, Australia, 21–24 October 2013; pp. 104–107. [Google Scholar]
- Lee, Y.J.; Trevathan, J.; Atkinson, I.; Read, W. The Integration, Analysis and Visualization of Sensor Data from Dispersed Wireless Sensor Network Systems Using the SWE Framework. J. Telecommun. Inf. Technol. 2015, 4, 86–97. [Google Scholar]
- Trevathan, J.; Hamilton, L.; Read, W. Allocating sensor network resources using an auction-based protocol. J. Theor. Appl. Electron. Commer. Res. 2016, 11, 41–63. [Google Scholar] [CrossRef]
- Borzaga, C.; Defourny, J. (Eds.) The Emergence of Social Enterprise; Psychology Press: Hove, UK, 2004; Volume 4. [Google Scholar]
- Taylor, J.; Capel, T.; Vyas, D.; Sharp, T. Facilitating digital participation through design projects with economically-marginalized communities. In Proceedings of the Workshop Digital Participation: Engaging Diverse and Marginalised Communities, Launceston, Australia, 29 November–2 December 2016. [Google Scholar]
- O’Flynn, B.; Regan, F.; Lawlor, A.; Wallace, J.; Torres, J.; O’Mathuna, C. Experiences and recommendations in deploying a real-time, water quality monitoring system. Meas. Sci. Technol. 2010, 21, 124004. [Google Scholar] [CrossRef] [Green Version]
- Chowdhury, F.H. Lake Ellerslie—A Study. MSc Dissertation, Griffith University, Logan, Queensland, Australia, 1999. [Google Scholar]











| Vendor | Product(s) |
|---|---|
| AXYX Technologies [24] | TRIAXYS Directional Wave Buoy, TRIAXYS Wave and Current Buoy, TRIAXYS Mini Wave Buoy, HydroLevel Buoy |
| Fondriest Environmental [25] | NexSens Data Buoys |
| Aanderaa [26] | SeaGuard Platform |
| Fugro [27] | SEAWATCH Wavescan Buoy, SEAWATCH Midi Buoy, SEAWATCH Buoy, SEAWATCH Mini II Buoy |
| Aridea [28] | Libelium-Aridea Offshore Buoy Kit |
| Subsystem | Description |
|---|---|
| Microcontroller | System control |
| Power | Batteries and power management logic |
| Solar Charging | Solar panels and solar charge controller |
| Timing | Real time clock to control duty cycling |
| Sensors | Sensor head, connections, sampling, calibration |
| Communications | Transmissions of sensor samples and system status to the server |
| Cleaning | Self-cleaning mechanisms to reduce the impacts of bio fouling |
| Manufacturer | Device | Cost |
|---|---|---|
| Research Buoys | ||
| SEMAT | 2018 Buoy | $154 |
| Albaladejo et al. 2012 [30] | 2011 Buoy | $395 |
| Sadler et al. 2017 [9] | Telemeted Sensor System (not capable of deployment in water) | $181 |
| Cave Pearl Logger [10] | Logging Device (no telemetry) | $100 |
| GBROOS [14] | $50,000–$250,000 | |
| Commercial Buoys | ||
| AXYS Technologies [24] | TRIAXYS Directional Wave Buoy, TRIAXYS Wave and Current Buoy, TRIAXYS Mini Wave Buoy, HydroLevel Buoy | Price only available upon request |
| Fondriest Environmental [25] | NetSense Data Buoys | $1495–$19,995 |
| Aanderaa [26] | SeaGuard Platform | Price only available upon request |
| Fugro [27] | SEAWATCH Wavescan Buoy, SEAWATCH Midi Buoy, SEAWATCH Buoy, SEAWATCH Mini II Buoy | Price only available upon request |
| Aridea [28] | Libelium-Aridea Offshore Buoy Kit | $13,295 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Trevathan, J.; Johnstone, R. Smart Environmental Monitoring and Assessment Technologies (SEMAT)—A New Paradigm for Low-Cost, Remote Aquatic Environmental Monitoring. Sensors 2018, 18, 2248. https://doi.org/10.3390/s18072248
Trevathan J, Johnstone R. Smart Environmental Monitoring and Assessment Technologies (SEMAT)—A New Paradigm for Low-Cost, Remote Aquatic Environmental Monitoring. Sensors. 2018; 18(7):2248. https://doi.org/10.3390/s18072248
Chicago/Turabian StyleTrevathan, Jarrod, and Ron Johnstone. 2018. "Smart Environmental Monitoring and Assessment Technologies (SEMAT)—A New Paradigm for Low-Cost, Remote Aquatic Environmental Monitoring" Sensors 18, no. 7: 2248. https://doi.org/10.3390/s18072248
APA StyleTrevathan, J., & Johnstone, R. (2018). Smart Environmental Monitoring and Assessment Technologies (SEMAT)—A New Paradigm for Low-Cost, Remote Aquatic Environmental Monitoring. Sensors, 18(7), 2248. https://doi.org/10.3390/s18072248