Evaluating Geometric Measurement Accuracy Based on 3D Reconstruction of Automated Imagery in a Greenhouse



Abstract
:1. Introduction
2. Materials and Methods
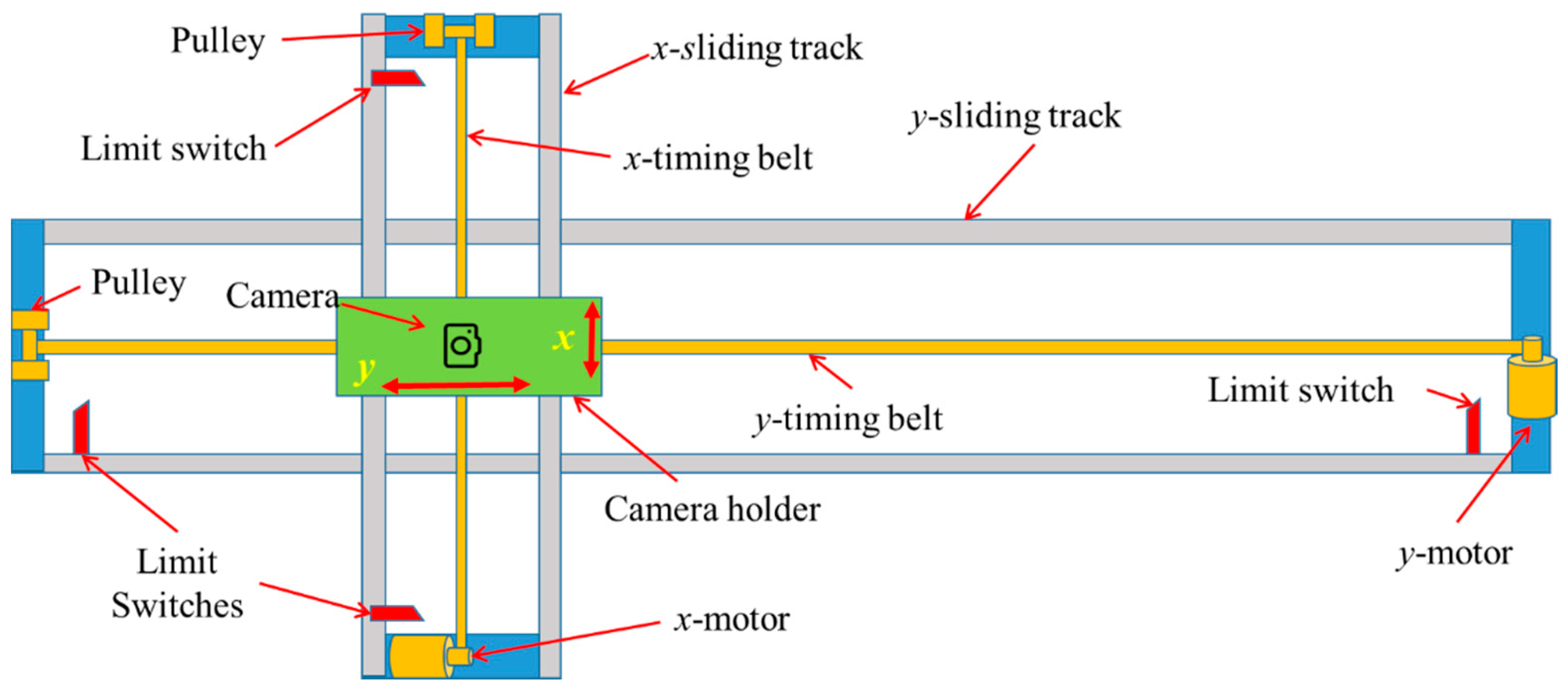
2.1. Image-Based Phenotyping Platform
2.2. Experiment Design
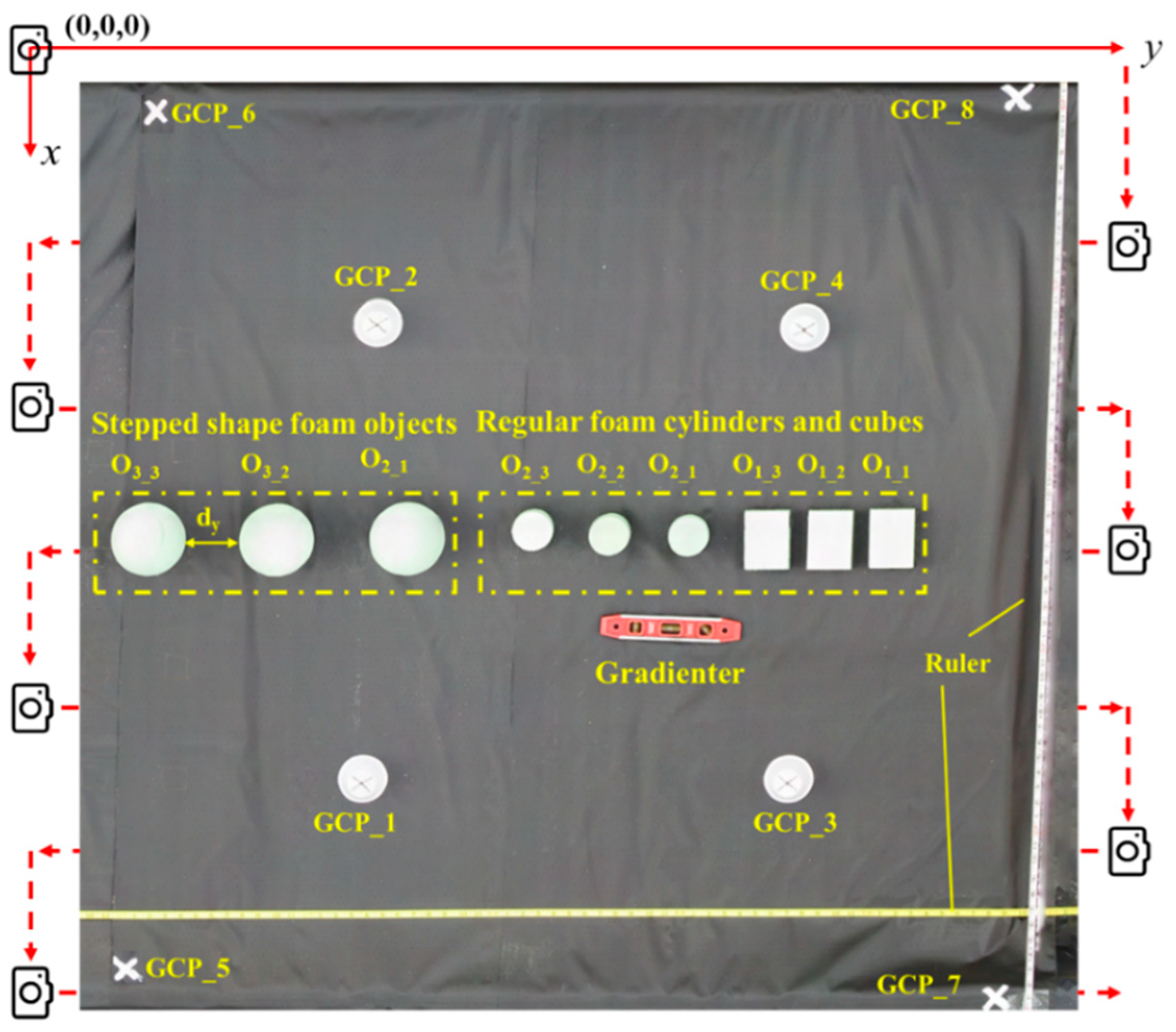
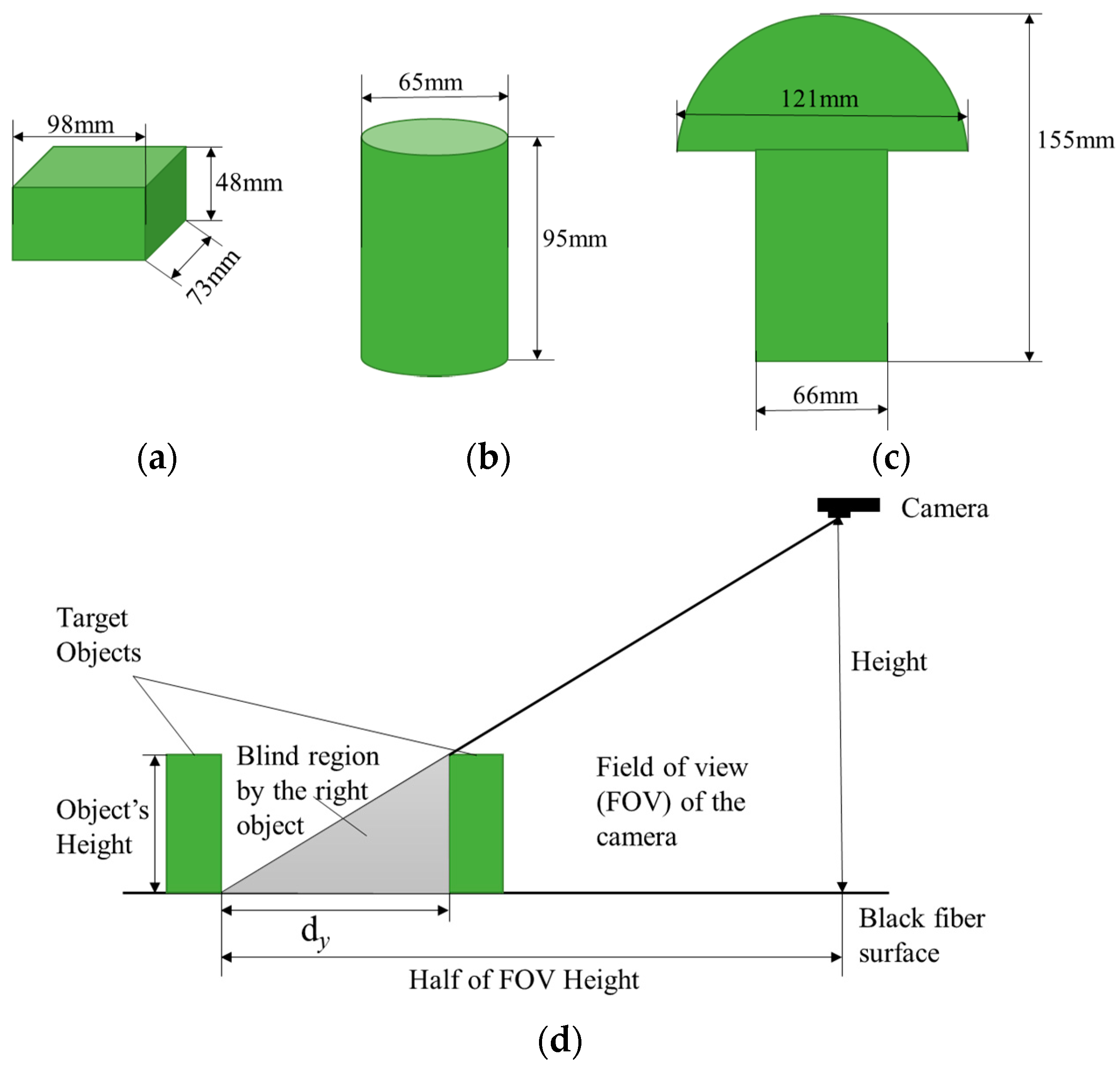
2.2.1. Experimental Setup
2.2.2. Image Overlap and Spatial Resolution
2.3. 3D Dense Cloud Reconstruction and Data Processing
2.3.1. 3D Dense Cloud Reconstruction
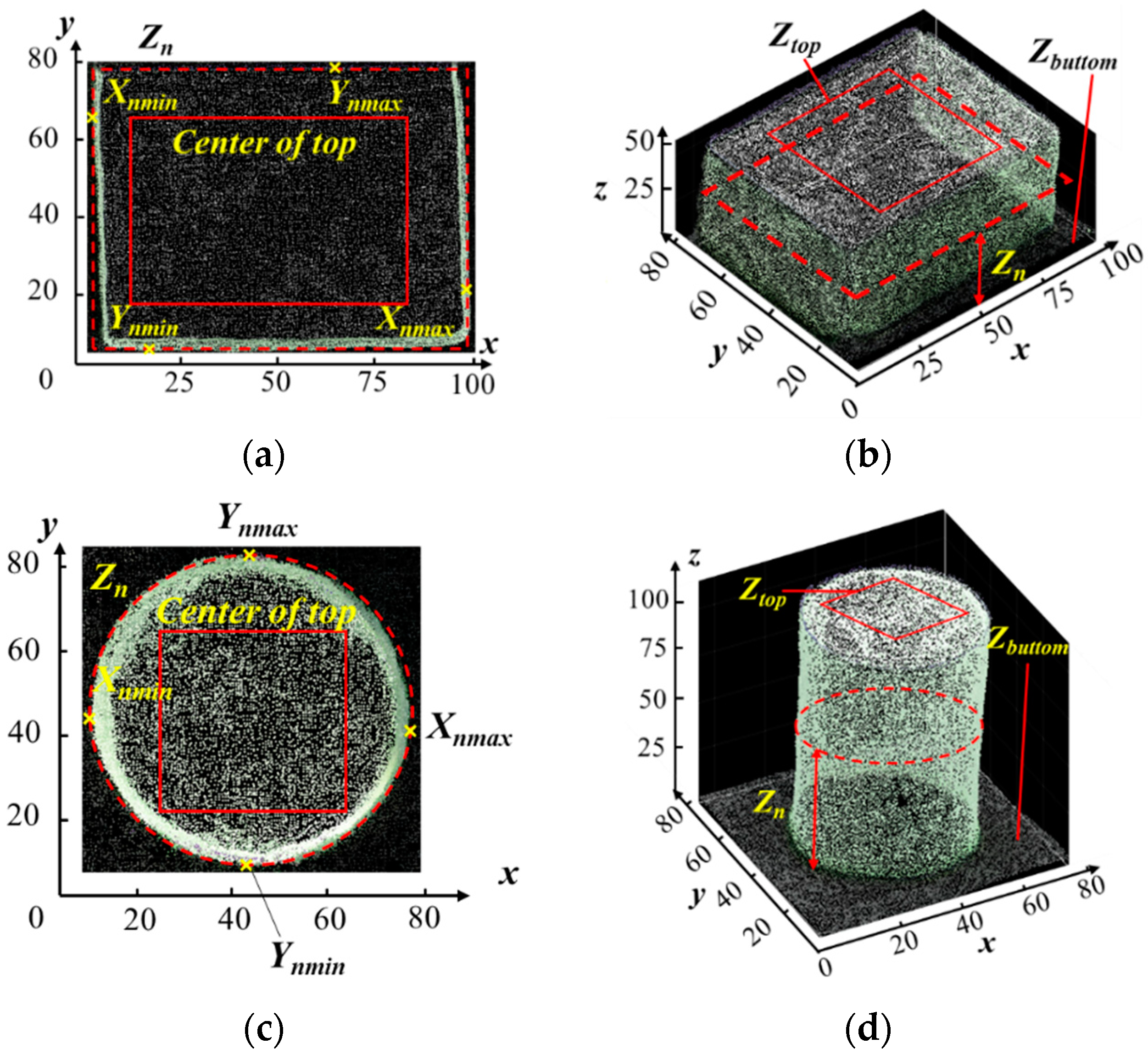
2.3.2. Object Segmentation
2.3.3. Object Height Correction and Calculation
2.4. Accuracy Assessment and Data Analysis
2.5. Case Study
3. Results
3.1. Measurement Accuracy in Three Dimensions
3.2. Effect of Object Shape on Measurement Accuracy
3.3. Relationship between Measurement Accuracy and POU
3.4. Relationship between Processing Time and Measurement Accuracy
3.5. Case Study
4. Conclusions
Supplementary Materials
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Paulus, S.; Schumann, H.; Kuhlmann, H.; Léon, J. High-precision laser scanning system for capturing 3D plant architecture and analysing growth of cereal plants. Biosyst. Eng. 2014, 121, 1–11. [Google Scholar] [CrossRef]
- Anjum, S.A.; Xie, X.Y.; Wang, L.C.; Saleem, M.F.; Man, C.; Lei, W. Morphological, physiological and biochemical responses of plants to drought stress. Afr. J. Agric. Res. 2011, 6, 2026–2032. [Google Scholar]
- Zhang, C.; Pumphrey, M.; Zhou, J.; Gao, H.; Zhang, Q.; Sankaran, S. Development of automated high-throughput phenotyping system for controlled environment studies. In Proceedings of the 2017 ASABE Annual International Meeting, Spokane, WA, USA, 16–19 July 2017; ASABE: St. Joseph, MI, USA; p. 1. [Google Scholar]
- Fiorani, F.; Schurr, U. Future scenarios for plant phenotyping. Annu. Rev. Plant Biol. 2013, 64, 267–291. [Google Scholar] [CrossRef] [PubMed]
- An, N.; Palmer, C.M.; Baker, R.L.; Markelz, R.C.; Ta, J.; Covington, M.F.; Maloof, J.N.; Welch, S.M.; Weinig, C. Plant high-throughput phenotyping using photogrammetry and imaging techniques to measure leaf length and rosette area. Comput. Electron. Agric. 2016, 127, 376–394. [Google Scholar] [CrossRef] [Green Version]
- Chaivivatrakul, S.; Tang, L.; Dailey, M.N.; Nakarmi, A.D. Automatic morphological trait characterization for corn plants via 3D holographic reconstruction. Comput. Electron. Agric. 2014, 109, 109–123. [Google Scholar] [CrossRef]
- Remondino, F.; El-Hakim, S. Image-based 3D modelling: A review. Photogramm. Rec. 2006, 21, 269–291. [Google Scholar] [CrossRef]
- Clark, R.T.; MacCurdy, R.; Jung, J.; Shaff, J.; McCouch, S.R.; Aneshansley, D.; Kochian, L. Three-dimensional root phenotyping with a novel imaging and software platform. Plant Physiol. 2011, 156, 455–465. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Walsh, K.B.; Verma, B. On-tree mango fruit size estimation using RGB-D images. Sensors 2017, 17, 2738. [Google Scholar] [CrossRef] [PubMed]
- Salinas, C.; Fernández, R.; Montes, H.; Armada, M. A new approach for combining time-of-flight and RGB cameras based on depth-dependent planar projective transformations. Sensors 2015, 15, 24615–24643. [Google Scholar] [CrossRef] [PubMed]
- Uchiyama, H.; Sakurai, S.; Mishima, M.; Arita, D.; Okayasu, T.; Shimada, A.; Taniguchi, R.I. An easy-to-setup 3D phenotyping platform for KOMATSUNA dataset. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Venice, Italy, 22–29 October 2017. [Google Scholar]
- Chéné, Y.; Rousseau, D.; Lucidarme, P.; Bertheloot, J.; Caffier, V.; Morel, P.; Belin, É.; Chapeau-Blondeau, F. On the use of depth camera for 3D phenotyping of entire plants. Comput. Electron. Agric. 2012, 82, 122–127. [Google Scholar] [Green Version]
- Snavely, N.; Seitz, S.M.; Szeliski, R. Photo tourism: Exploring photo collections in 3D. In ACM Transactions on Graphics (TOG); ACM: New York, NY, USA, 2006. [Google Scholar]
- Jay, S.; Rabatel, G.; Hadoux, X.; Moura, D.; Gorretta, N. In-field crop row phenotyping from 3D modeling performed using Structure from Motion. Comput. Electron. Agric. 2015, 110, 70–77. [Google Scholar] [CrossRef]
- Fonstad, M.A.; Dietrich, J.T.; Courville, B.C.; Jensen, J.L.; Carbonneau, P.E. Topographic structure from motion: A new development in photogrammetric measurement. Earth Surf. Process. Landf. 2013, 38, 421–430. [Google Scholar] [CrossRef]
- Lowe, D.G. Object recognition from local scale-invariant features. In Proceedings of the Seventh IEEE International Conference on Computer Vision, Kerkyra, Greece, 20–27 September 1999. [Google Scholar]
- James, M.R.; Robson, S. Straightforward reconstruction of 3D surfaces and topography with a camera: Accuracy and geoscience application. J. Geophys. Res. Earth Surf. 2012, 117. [Google Scholar] [CrossRef] [Green Version]
- Nouwakpo, S.K.; James, M.R.; Weltz, M.A.; Huang, C.H.; Chagas, I.; Lima, L. Evaluation of structure from motion for soil microtopography measurement. Photogramm. Rec. 2014, 29, 297–316. [Google Scholar] [CrossRef]
- Westoby, M.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef] [Green Version]
- Chiabrando, F.; Nex, F.; Piatti, D.; Rinaudo, F. UAV and RPV systems for photogrammetric surveys in archaelogical areas: Two tests in the Piedmont region (Italy). J. Archaeol. Sci. 2011, 38, 697–710. [Google Scholar] [CrossRef]
- Sauerbier, M.; Eisenbeiss, H. UAVs for the documentation of archaeological excavations. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2010, 38, 526–531. [Google Scholar]
- Dandois, J.P.; Olano, M.; Ellis, E.C. Optimal altitude, overlap, and weather conditions for computer vision UAV estimates of forest structure. Remote Sens. 2015, 7, 13895–13920. [Google Scholar] [CrossRef]
- Torres-Sánchez, J.; López-Granados, F.; Borra-Serrano, I.; Peña, J.M. Assessing UAV-collected image overlap influence on computation time and digital surface model accuracy in olive orchards. Precis. Agric. 2017, 19, 115–133. [Google Scholar] [CrossRef] [Green Version]
- Santos, T.T.; de Oliveira, A.A. Image-based 3D digitizing for plant architecture analysis and phenotyping. in Embrapa Informática Agropecuária-Artigo em anais de congresso (ALICE). In Proceedings of the Conference on Graphics, Patterns and Images, Ouro Preto, Brazil, 22–25 August 2012. [Google Scholar]
- Li, D.; Xu, L.; Tang, X.S.; Sun, S.; Cai, X.; Zhang, P. 3D imaging of greenhouse plants with an inexpensive binocular stereo vision system. Remote Sens. 2017, 9, 508. [Google Scholar] [CrossRef]
- Tian, L.F.; Slaughter, D.C. Environmentally adaptive segmentation algorithm for outdoor image segmentation. Comput. Electron. Agric. 1998, 21, 153–168. [Google Scholar] [CrossRef] [Green Version]
- Gindraux, S.; Boesch, R.; Farinotti, D. Accuracy Assessment of digital surface models from unmanned aerial vehicles’ imagery on glaciers. Remote Sens. 2017, 9, 186. [Google Scholar] [CrossRef]
- Canada, N.R. Concepts of Aerial Photography. 1 September 2016. Available online: http://www.nrcan.gc.ca/node/9687 (accessed on 20 April 2018).
- Turner, D.; Lucieer, A.; de Jong, S.M. Time series analysis of landslide dynamics using an unmanned aerial vehicle (UAV). Remote Sens. 2015, 7, 1736–1757. [Google Scholar] [CrossRef]
- Rosnell, T.; Honkavaara, E. Point cloud generation from aerial image data acquired by a quadrocopter type micro unmanned aerial vehicle and a digital still camera. Sensors 2012, 12, 453–480. [Google Scholar] [CrossRef] [PubMed]
- DeWitt, B.A.; Wolf, P.R. Elements of Photogrammetry: With Applications in GIS; McGraw-Hill: New York, NY, USA, 2000; Volume 3. [Google Scholar]
- Canada, N.R. Spatial Resolution, Pixel Size, and Scale. 20 January 2015. Available online: http://www.nrcan.gc.ca/node/9407 (accessed on 20 April 2018).
- Chen, D.; Stow, D.; Gong, P. Examining the effect of spatial resolution and texture window size on classification accuracy: an urban environment case. Int. J. Remote Sens. 2004, 25, 2177–2192. [Google Scholar] [CrossRef]
- Huang, H.; Wu, B.; Fan, J. Analysis to the relationship of classification accuracy, segmentation scale, image resolution. In Proceedings of the 2003 IEEE International Geoscience and Remote Sensing Symposium (IGARSS’03 2003), Toulouse, France, 21–25 July 2003. [Google Scholar]
- Snavely, N.; Seitz, S.M.; Szeliski, R. Modeling the world from internet photo collections. Int. J. Comput. Vis. 2008, 80, 189–210. [Google Scholar] [CrossRef]
- Özyeşil, O.; Voroninski, V.; Basri, R.; Singer, A. A survey of structure from motion. Acta Numer. 2017, 26, 305–364. [Google Scholar] [CrossRef]
- Hunt, E.R.; Daughtry, C.S.T.; Eitel, J.U.; Long, D.S. Remote sensing leaf chlorophyll content using a visible band index. Agron. J. 2011, 103, 1090–1099. [Google Scholar] [CrossRef]
- Tuberosa, R. Phenotyping for drought tolerance of crops in the genomics era. Front. Physiol. 2012, 3, 347. [Google Scholar] [CrossRef] [PubMed]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Definition/Explanation | Value |
|---|---|---|
| Sw (mm) | Camera sensor width | 6.17 |
| Sh (mm) | Camera sensor height | 4.55 |
| FR (mm) | Camera focal length | 4.00 |
| imW (pixels) | Image width | 5152 |
| imH (pixels) | Image height | 3864 |
| FOVW (mm) | Width of field of view (FOV) at ground level | 1851 |
| FOVH (mm) | Height of FOV at ground level | 1365 |
| H (mm) | Distance between camera lens and the test bed | 1200 |
| Distance between Two Neighboring Routes (Lx) (mm) | Ox (%) | Forwarding Speed in y (mm·s−1) | Oy (%) | Number of Images |
|---|---|---|---|---|
| 183 | 90 | 22.75 | 95 | 330 |
| 183 | 90 | 22.75 | 85 | 119 |
| 183 | 90 | 22.75 | 75 | 81 |
| 366 | 80 | 68.25 | 95 | 156 |
| 366 | 80 | 68.25 | 85 | 61 |
| 366 | 80 | 68.25 | 75 | 43 |
| 610 | 67 | 113.75 | 95 | 106 |
| 610 | 67 | 113.75 | 85 | 42 |
| 610 | 67 | 113.75 | 75 | 30 |
| SR (pixel·mm−1) | Ox (%) | Oy (%) | POU (pixel·mm−1) | SR (pixel·mm−1) | Ox (%) | Oy (%) | POU (pixel·mm−1) |
|---|---|---|---|---|---|---|---|
| 2.78 | 90 | 95 | 556 | 1.96 | 90 | 95 | 278 |
| 2.78 | 90 | 85 | 185 | 1.96 | 90 | 85 | 93 |
| 2.78 | 90 | 75 | 111 | 1.96 | 90 | 75 | 56 |
| 2.78 | 80 | 95 | 278 | 1.96 | 80 | 95 | 139 |
| 2.78 | 80 | 85 | 93 | 1.96 | 80 | 85 | 46 |
| 2.78 | 80 | 75 | 56 | 1.96 | 80 | 75 | 28 |
| 2.78 | 67 | 95 | 168 | 1.96 | 67 | 95 | 84 |
| 2.78 | 67 | 85 | 56 | 1.96 | 67 | 75 | 17 |
| 2.78 | 67 | 75 | 34 |
| Dimension | Means ± Std (mm) | ||
|---|---|---|---|
| O1 | O2 | O3 | |
| x | 7.8 ± 12.9 c | 12.8 ± 10.5 b | 27.2 ± 33.7 a |
| y | 10.7 ± 10.0 d | 13.0 ± 8.2 b | 25.4 ± 34.7 a |
| z | 4.7 ± 3.2 e | 5.5 ± 5.1 e | 5.7 ± 3.8 e |
| POU (pixel·mm−1) | Number of Points of an Object | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| O1_1 | O1_2 | O1_3 | O2_1 | O2_2 | O2_3 | O3_1 | O3_2 | O3_3 | |
| Highest (556) | 54,528 | 52,490 | 57,283 | 58,373 | 60,921 | 58,715 | 121,214 | 120,414 | 112,502 |
| Lowest (17) | 9955 | 8198 | 8645 | 7172 | 8141 | 6963 | 15,314 | 12,669 | 14,342 |
| Degree of Freedom | Sum of Squares | Mean Square | F Value | Pr (>F) | |
|---|---|---|---|---|---|
| Measurement method | 1 | 13 | 12.6 | 0.014 | 0.907 |
| Residuals | 86 | 78,562 | 913.5 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, J.; Fu, X.; Schumacher, L.; Zhou, J. Evaluating Geometric Measurement Accuracy Based on 3D Reconstruction of Automated Imagery in a Greenhouse. Sensors 2018, 18, 2270. https://doi.org/10.3390/s18072270
Zhou J, Fu X, Schumacher L, Zhou J. Evaluating Geometric Measurement Accuracy Based on 3D Reconstruction of Automated Imagery in a Greenhouse. Sensors. 2018; 18(7):2270. https://doi.org/10.3390/s18072270
Chicago/Turabian StyleZhou, Jing, Xiuqing Fu, Leon Schumacher, and Jianfeng Zhou. 2018. "Evaluating Geometric Measurement Accuracy Based on 3D Reconstruction of Automated Imagery in a Greenhouse" Sensors 18, no. 7: 2270. https://doi.org/10.3390/s18072270
APA StyleZhou, J., Fu, X., Schumacher, L., & Zhou, J. (2018). Evaluating Geometric Measurement Accuracy Based on 3D Reconstruction of Automated Imagery in a Greenhouse. Sensors, 18(7), 2270. https://doi.org/10.3390/s18072270