Sensitivity-Improved Ultrasonic Sensor for 3D Imaging of Seismic Physical Model Using a Compact Microcavity


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Sensor Fabrication and Operation Principle
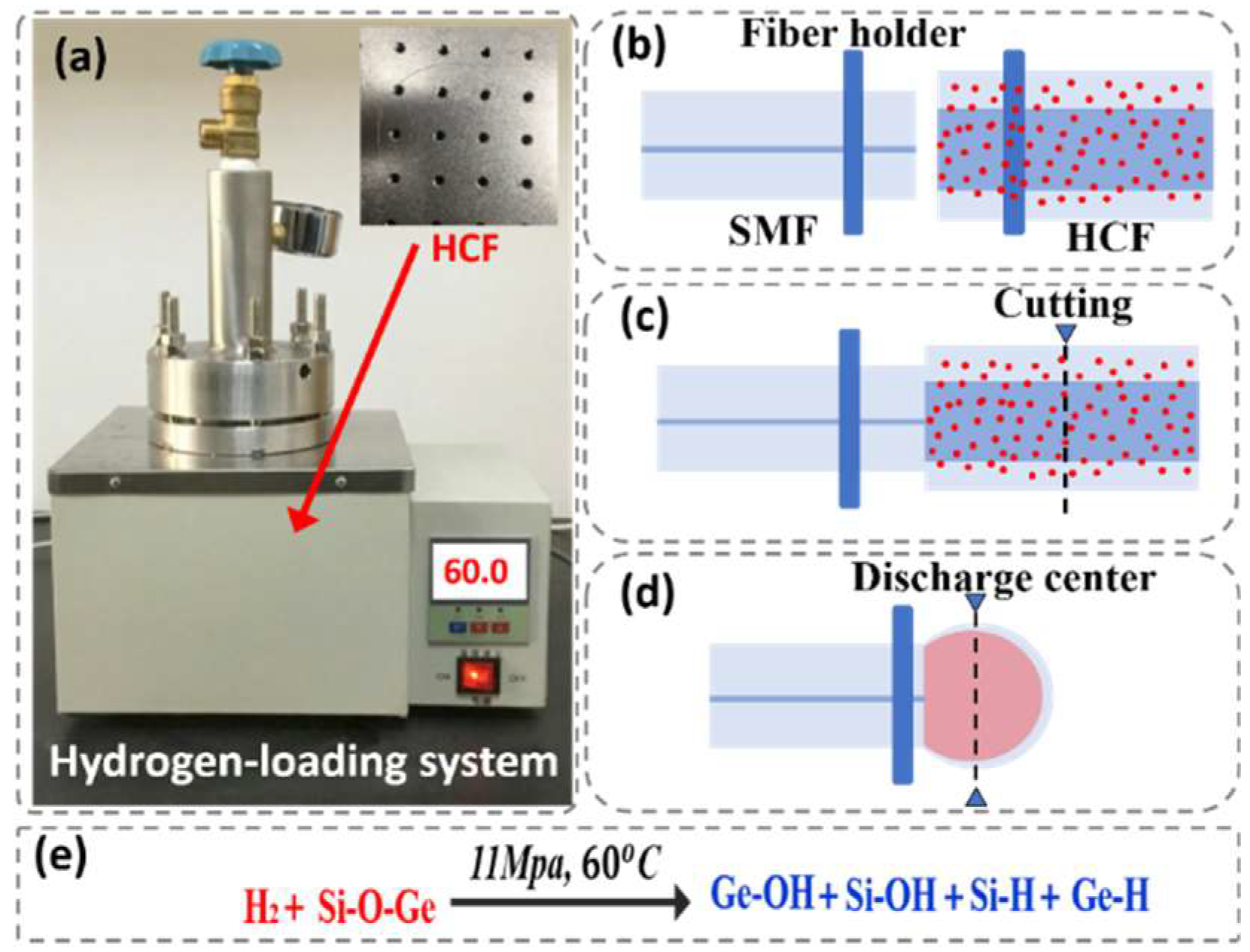
2.1. Sensor Fabrication
2.2. Operation Principle
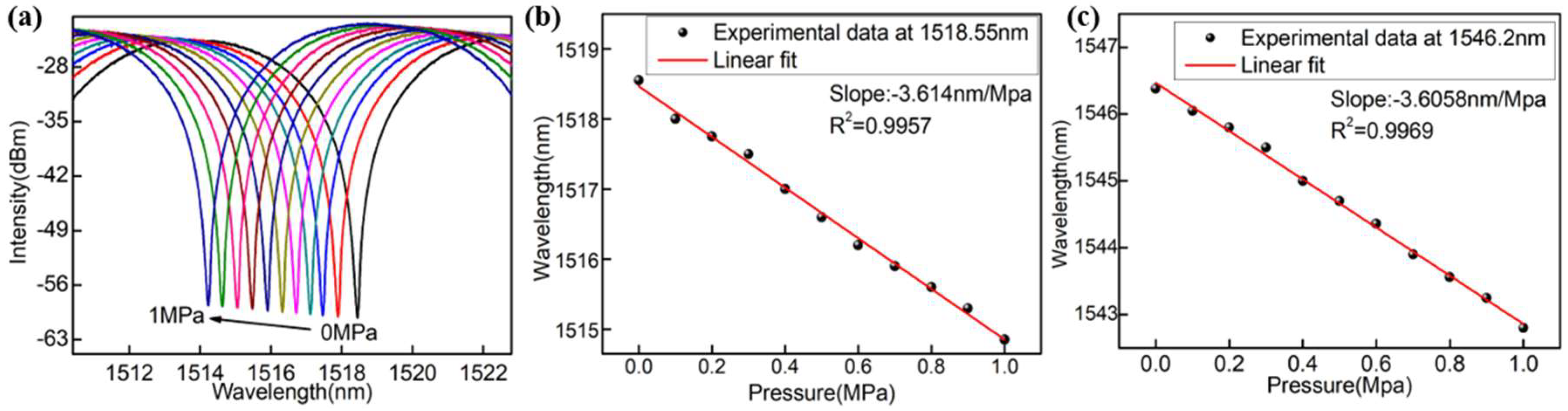
3. Pressure Measurement and Discussion
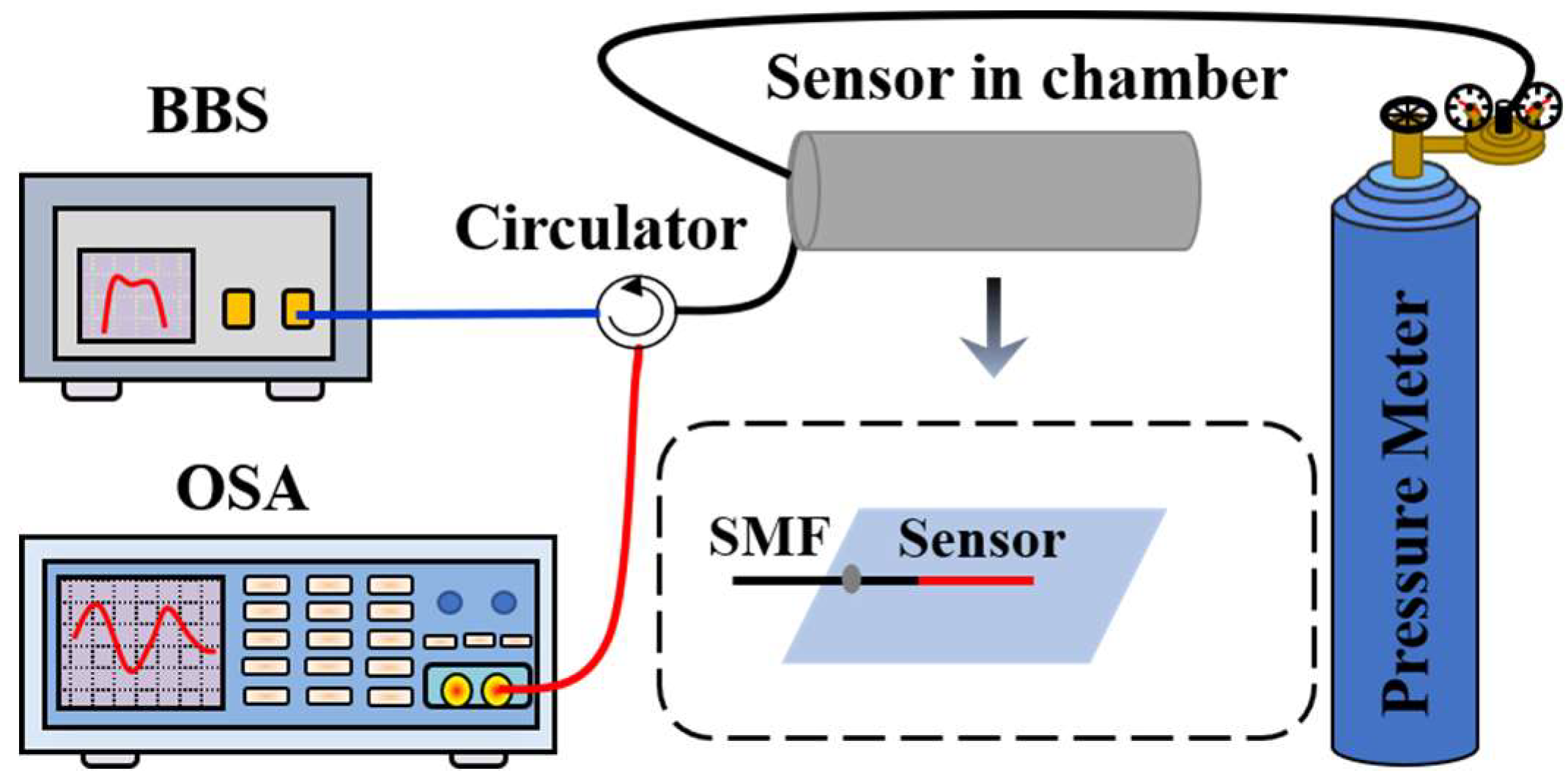
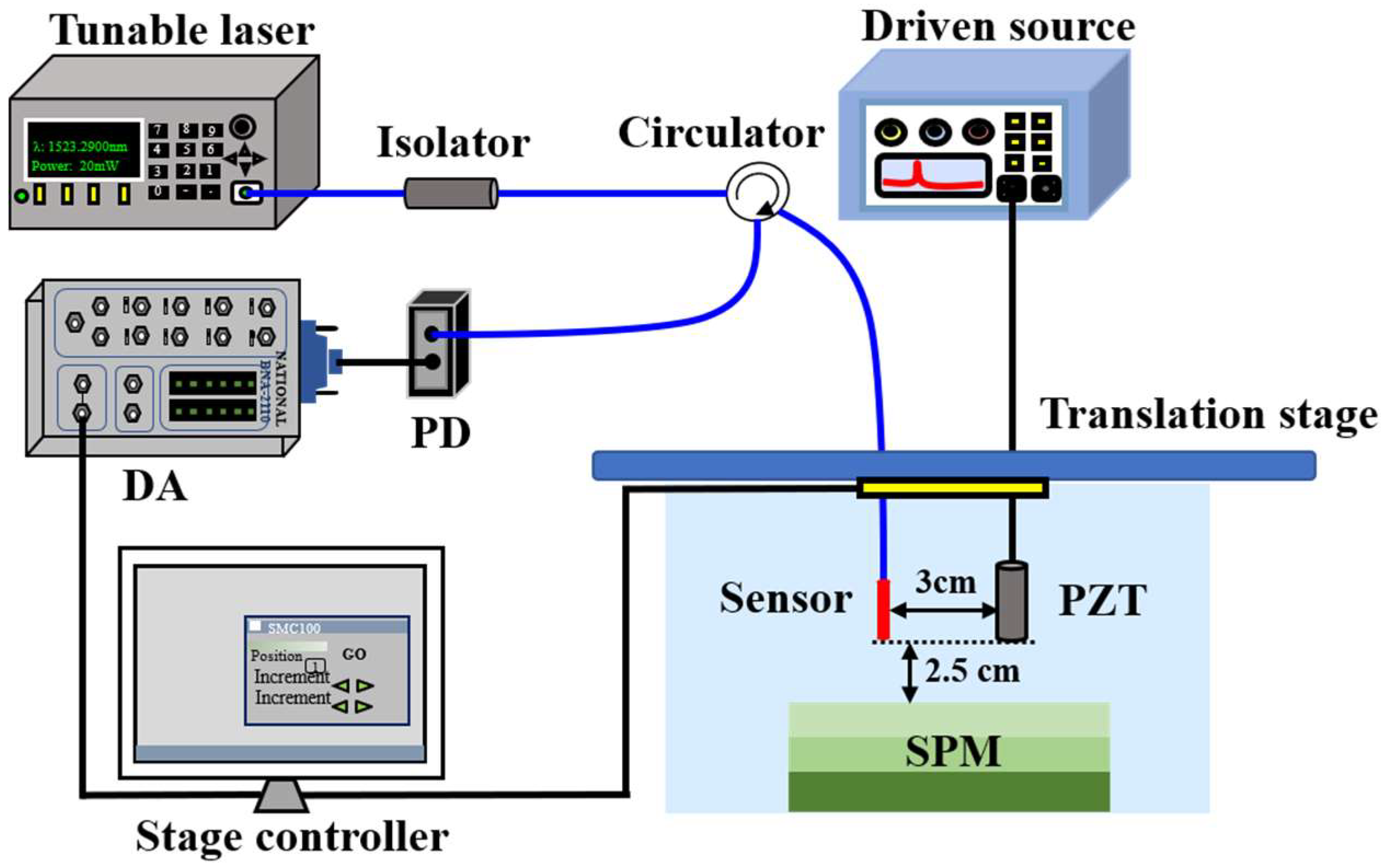
3.1. Experimental Setup for Measuring Pressure
3.2. Experimental Results
4. Ultrasonic Detection, Imaging and Discussion
4.1. Experimental System for Ultrasonic Detection and Imaging
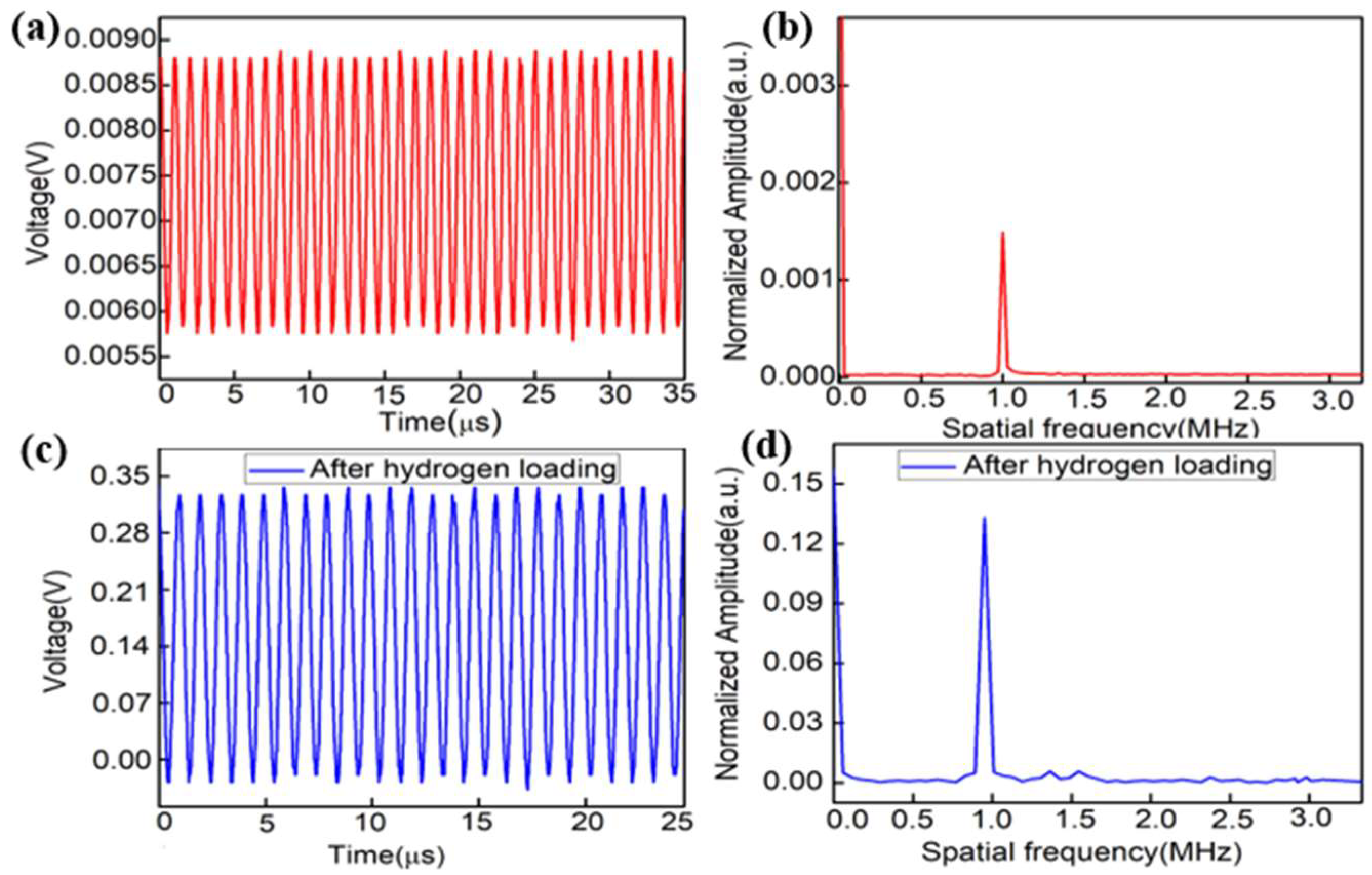
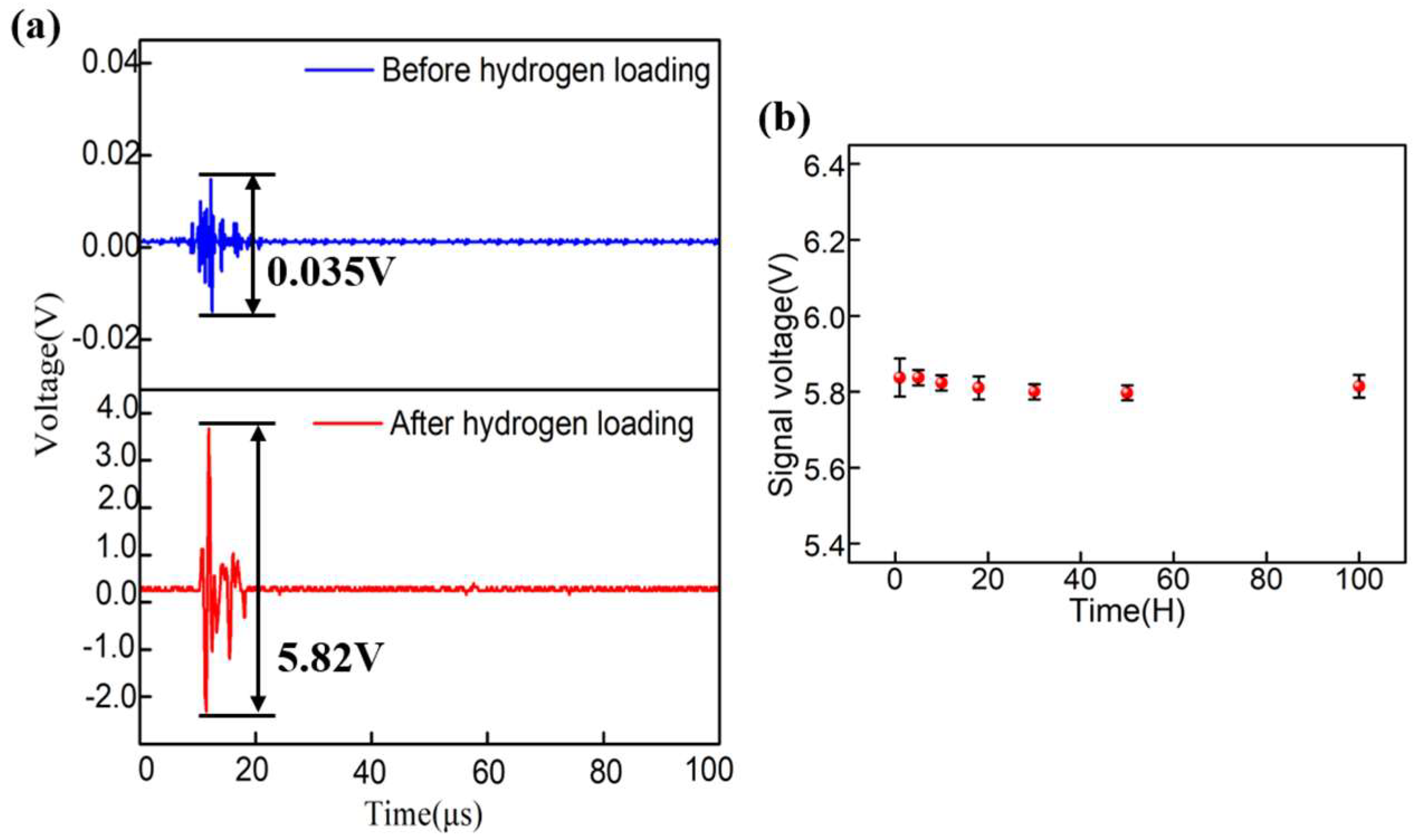
4.2. Ultrasonic Detection
4.3. Seismic Physical Model Imaging
4.4. Discussion
4.4.1. Signal Noise Ratio (SNR)
4.4.2. Resolution
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Guo, H.; Xiao, G.; Mzih, N.; Yao, J. Fiber Optic Sensors for Structural Health Monitoring of Air Platforms. Sensors 2011, 11, 3687–3705. [Google Scholar] [CrossRef] [PubMed]
- Rong, Q.; Hao, Y.; Zhou, R.; Yi, X.; Shao, Z.; Liang, L.; Qiao, X. UW Imaging of Seismic-Physical-Models in Air Using Fiber-Optic Fabry–Perot Interferometer. Sensors 2017, 17. [Google Scholar] [CrossRef] [PubMed]
- Zhang, W.; Wang, R.; Rong, Q.; Qiao, X.; Guo, T.; Shao, Z.; Li, J.; Ma, W. An Optical Fiber Fabry–Perot Interferometric Sensor Based on Functionalized Diaphragm for Ultrasound Detection and Imaging. IEEE Photonics J. 2017, 9, 1–8. [Google Scholar] [CrossRef]
- Rong, Q.; Shao, Z.; Yin, X.; Gang, T.; Liu, F.; Sun, A.; Qiao, X. Ultrasonic Imaging of Seismic Physical Models Using Fiber Bragg Grating Fabry–Perot Probe. IEEE J. Sel. Top. Quantum Electron. 2016, 23, 223–228. [Google Scholar] [CrossRef]
- Rong, Q.; Zhou, R.; Hao, Y.; Yin, X.; Shao, Z.; Gang, T.; Qiao, X. Ultrasonic sensitivity-improved Fabry–Perot interferometer using acoustic focusing and its application for non-contact imaging. IEEE Photonics J. 2017, 9. [Google Scholar] [CrossRef]
- Gang, T.; Hu, M.; Qiao, X.; Li, J.; Shao, Z.; Tong, R.; Rong, Q. Fiber-optic Michelson interferometer fixed in a tilted tube for direction-dependent ultrasonic detection. Opt. Lasers Eng. 2017, 88, 60–64. [Google Scholar] [CrossRef]
- Tsuda, H.; Sato, E.; Nakajima, T.; Nakamura, H.; Arakawa, T.; Shiono, H.; Minato, M. Acoustic emission measurement using a strain-insensitive fiber Bragg grating sensor under varying load conditions. Opt. Lett. 2009, 34, 2942–2944. [Google Scholar] [CrossRef] [PubMed]
- Guo, J.; Yang, C. Highly Stabilized Phase-Shifted Fiber Bragg Grating Sensing System for Ultrasonic Detection. IEEE Photonics Technol. Lett. 2015, 27, 848–851. [Google Scholar] [CrossRef]
- Guan, B.O.; Tam, H.Y.; Lau, S.T.; Chan, H.L.W. Ultrasonic hydrophone based on distributed Bragg reflector fiber laser. IEEE Photonics Technol. Lett. 2005, 17, 169–171. [Google Scholar] [CrossRef] [Green Version]
- Liu, T.; Hu, L.; Han, M. Adaptive ultrasonic sensor using a fiber ring laser with tandem fiber Bragg gratings. Opt. Lett. 2014, 39, 4462–4465. [Google Scholar] [CrossRef] [PubMed]
- Wu, Q.; Okabe, Y. Ultrasonic sensor employing two cascaded phase-shifted fiber Bragg gratings suitable for multiplexing. Opt. Lett. 2012, 37, 3336–3338. [Google Scholar] [CrossRef] [PubMed]
- Minardo, A.; Cusano, A.; Bernini, R.; Zeni, L.; Giordano, M. Response of fiber Bragg gratings to longitudinal ultrasonic waves. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2005, 52, 304–312. [Google Scholar] [CrossRef] [PubMed]
- Pierce, S.G.; Philp, W.R.; Gachagan, A.; McNab, A.; Hayward, G.; Culshaw, B. Surface-bonded and embedded optical fibers as ultrasonic sensors. Appl. Opt. 1996, 35, 5191–5197. [Google Scholar] [CrossRef] [PubMed]
- Wang, D.H.; Jia, P.G.; Wang, S.J.; Zhao, C.L.; Zeng, D.P.; Wang, H.; Li, F.Q. Tip-sensitive all-silica fiber-optic Fabry–Perot ultrasonic hydrophone for charactering high intensity focused ultrasound fields. Appl. Phys. Lett. 2013, 103, 243502. [Google Scholar] [CrossRef]
- Zhang, J.L.; Sheng, X.Z.; Wu, C.Q.; Zhang, L.J. Laser ultrasound detecting experiment with fiber Michelson interferometer. In Proceedings of the Optical Fiber Communication and Optoelectronics Conference (IEEE), Shanghai, China, 17–19 October 2007; pp. 629–631. [Google Scholar]
- Jang, T.S.; Lee, S.S.; Kwon, Il.B.; Lee, W.J.; Lee, J.J. Noncontact detection of ultrasonic waves using fiber optic Sagnac interferometer. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2002, 49, 767–775. [Google Scholar] [CrossRef] [PubMed]
- Beard, P.C.; Mills, T.N. Miniature optical fibre ultrasonic hydrophone using a Fabry–Perot polymer film interferometer. Electron. Lett. 1997, 33, 801–803. [Google Scholar] [CrossRef]
- Jiang, J.; Zhang, T.; Wang, S.; Liu, K.; Li, C.; Zhao, Z.; Liu, T. Non-contact ultrasonic detection in low-pressure carbon dioxide medium using high sensitivity fiber-optic Fabry–Perot sensor system. J. Lightwave Technol. 2017, 35, 5079–5083. [Google Scholar] [CrossRef]
- Morris, P.; Hurrell, A.; Shaw, A.; Zhang, E.; Beard, P. A Fabry-Pérot fiber-optic ultrasonic hydrophone for the simultaneous measurement of temperature and acoustic pressure. J. Acoust. Soc. Am. 2009, 125, 3611–3622. [Google Scholar] [CrossRef] [PubMed]
- Bae, H.; Yu, M. Miniature Fabry–Perot pressure sensor created by using UV-molding process with an optical fiber based mold. Opt. Express 2012, 20, 14573–14583. [Google Scholar] [CrossRef] [PubMed]
- Liao, C.; Liu, S.; Liu, S.; Xu, L.; Wang, C.; Wang, Y.; Li, Z.; Wang, Q.; Wang, D.N. Sub-micron silica diaphragm-based fiber-tip Fabry–Perot interferometer for pressure measurement. Opt. Lett. 2014, 39, 2827–2830. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Wang, D.N.; Wang, C.; Hu, T. Compressible fiber optic micro-Fabry-Pérot cavity with ultra-high pressure sensitivity. Opt. Express 2013, 21, 14084–14089. [Google Scholar] [CrossRef] [PubMed]
- Sun, B.; Wang, Y.; Qu, J.; Liao, C.; Yin, G.; He, J.; Zhou, J.; Tang, J.; Liu, S.; Li, Z.; et al. Simultaneous measurement of pressure and temperature by employing Fabry–Perot interferometer based on pendant polymer droplet. Opt. Express 2015, 23, 1906–1911. [Google Scholar] [CrossRef] [PubMed]
- Guo, F.; Fink, T.; Han, M.; Koester, L.; Turner, J.; Huang, J. High-sensitivity, high-frequency extrinsic Fabry–Perot interferometric fiber-tip sensor based on a thin silver diaphragm. Opt. Lett. 2012, 37, 1505–1507. [Google Scholar] [CrossRef] [PubMed]
- Xu, F.; Ren, D.; Shi, X.; Li, C.; Lu, W.; Lu, L.; Lu, L.; Yu, B. High-sensitivity Fabry–Perot interferometric pressure sensor based on a nano-thick silver diaphragm. Opt. Lett. 2012, 37, 133–135. [Google Scholar] [CrossRef] [PubMed]
- Gang, T.; Hu, M.; Rong, Q.; Qiao, X.; Liang, L.; Liu, N.; Tong, R.; Liu, X.; Bian, C. High-Frequency Fiber-Optic Ultrasonic Sensor Using Air Micro-Bubble for Imaging of Seismic Physical Models. Sensors 2016, 16. [Google Scholar] [CrossRef] [PubMed]
- Ma, J.; Ju, J.; Jin, L.; Jin, W.W. A compact Fiber-Tip micro-cavity sensor for high-pressure measurement. IEEE Photonics Technol. Lett. 2011, 23, 1561–1563. [Google Scholar] [CrossRef]
- Dakin, J.P.; Ecke, W.; Schroeder, K.; Reuter, M. Optical fiber sensors using hollow glass spheres and CCD spectrometer interrogator. Opt. Lasers Eng. 2009, 47, 1034–1038. [Google Scholar] [CrossRef]
- Bar-Zion, A.; Tremblay-Darveau, C.; Solomon, O.; Dan, A.; Eldar, Y.C. Fast vascular ultrasound imaging with enhanced spatial resolution and background rejection. IEEE Trans. Med. Imaging 2016, 36, 169–180. [Google Scholar] [CrossRef] [PubMed]









© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gang, T.; Hu, M.; Bai, X.; Rong, Q. Sensitivity-Improved Ultrasonic Sensor for 3D Imaging of Seismic Physical Model Using a Compact Microcavity. Sensors 2018, 18, 2315. https://doi.org/10.3390/s18072315
Gang T, Hu M, Bai X, Rong Q. Sensitivity-Improved Ultrasonic Sensor for 3D Imaging of Seismic Physical Model Using a Compact Microcavity. Sensors. 2018; 18(7):2315. https://doi.org/10.3390/s18072315
Chicago/Turabian StyleGang, Tingting, Manli Hu, Xiaohong Bai, and Qiangzhou Rong. 2018. "Sensitivity-Improved Ultrasonic Sensor for 3D Imaging of Seismic Physical Model Using a Compact Microcavity" Sensors 18, no. 7: 2315. https://doi.org/10.3390/s18072315
APA StyleGang, T., Hu, M., Bai, X., & Rong, Q. (2018). Sensitivity-Improved Ultrasonic Sensor for 3D Imaging of Seismic Physical Model Using a Compact Microcavity. Sensors, 18(7), 2315. https://doi.org/10.3390/s18072315