Development of Wheel Pressure Control Algorithm for Electronic Stability Control (ESC) System of Commercial Trucks


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
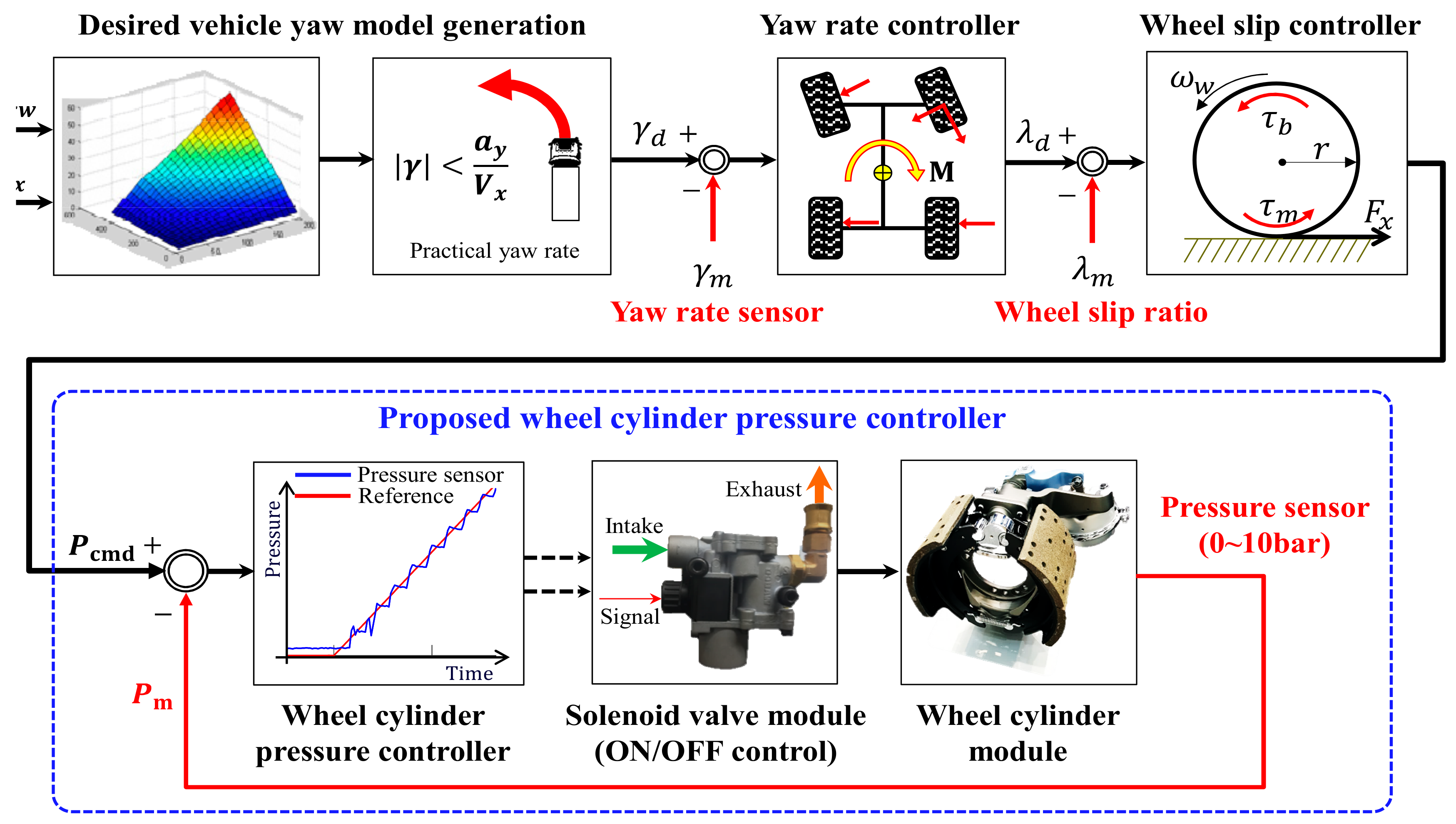
2. Overview of Pneumatic ESC System
3. Brake System of a Commercial Truck
3.1. Brake System of a Commercial Truck
3.2. Description of the Pneumatic Circuit for a Commercial Truck’s Brake System
4. Wheel Pressure Control Based on Pressure Sensor Feedback
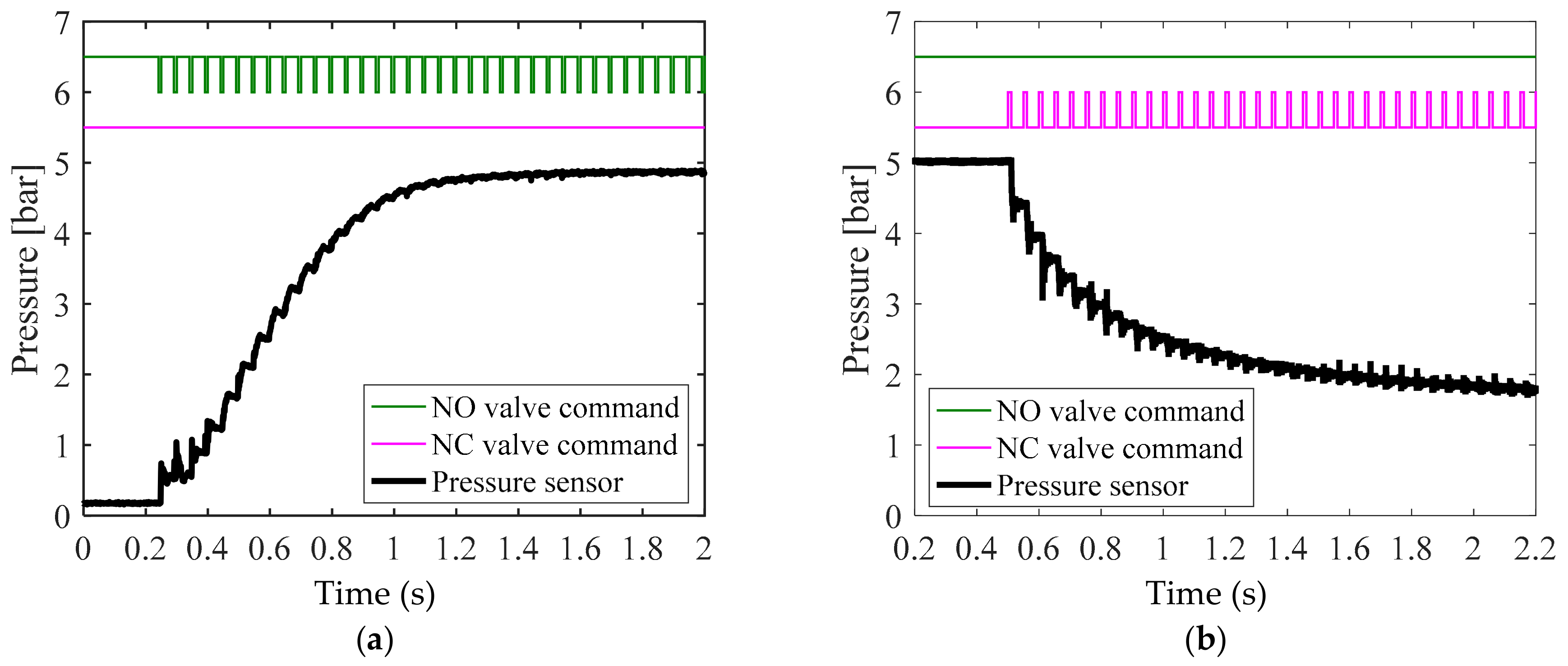
4.1. Operating Principle of Pressure Modulation Valves
4.2. Dynamic Characteristics of a Pneumatic Brake System
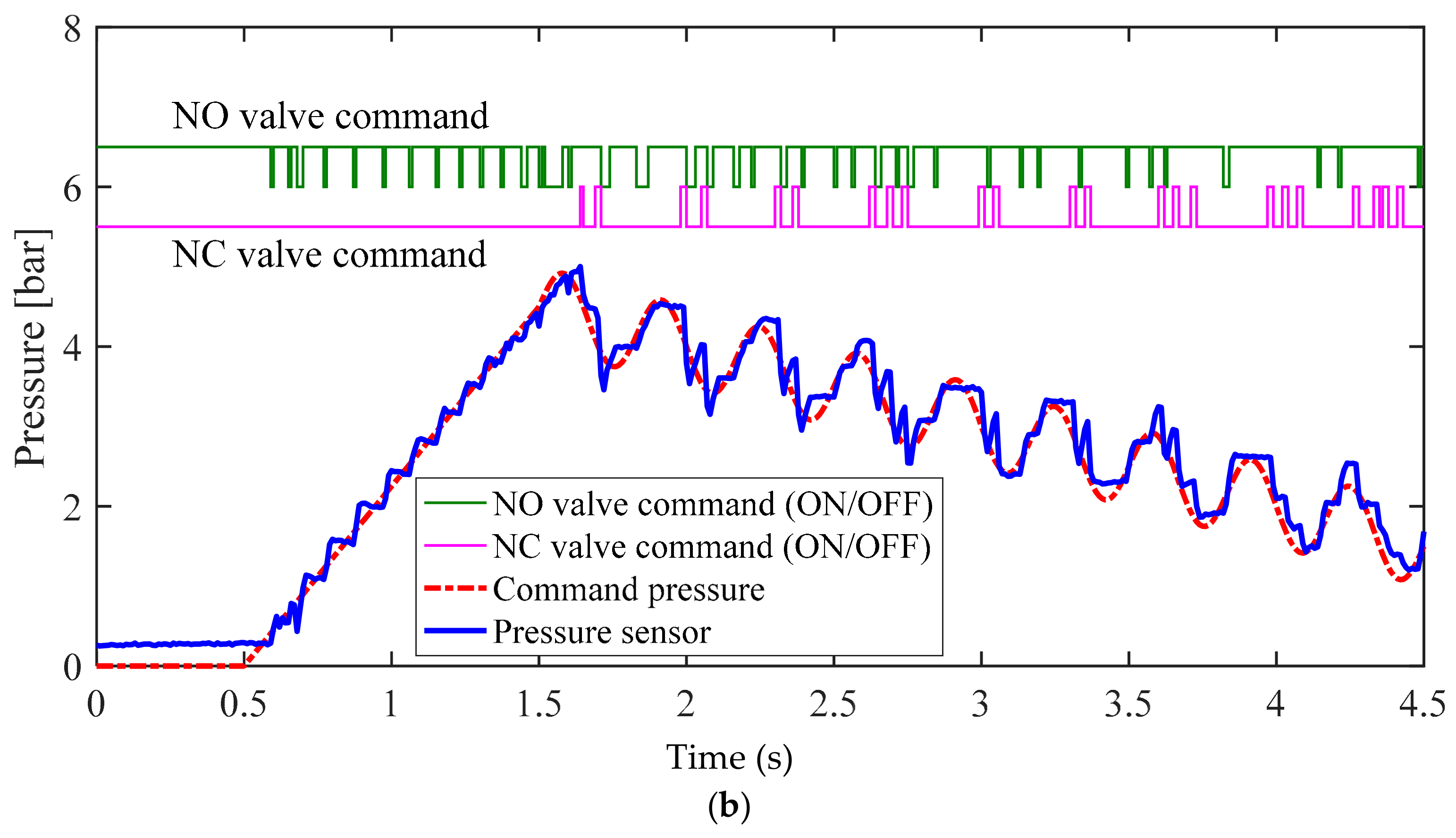
4.3. Design of a Wheel Cylinder Pressure Controller
5. Experimental Verification
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Dunn, A.; Hoover, R. Class 8 Truck Tractor Braking Performance Improvement Study; Report 1, Straight Line Stopping Performance on a High Coefficient of Friction Surface; Transportation Research Center Inc./National Highway Traffic Safety Administration: East Liberty, OH, USA, 2004. [Google Scholar]
- Jermakian, J.S. Crash Avoidance Potential of Four Large Truck Technologies; Insurance Institute for Highway Safety: Arlington, VA, USA, 2010. [Google Scholar]
- National Highway Traffic and Safety Administration. Traffic Safety Facts 2007; US Department of Transportation: Washington, DC, USA, 2008.
- Choi, M.; Choi, S.B. Model predictive control for vehicle yaw stability with practical concerns. IEEE Trans. Veh. Technol. 2014, 63, 3539–3548. [Google Scholar] [CrossRef]
- Laine, L.; Andreasson, J. Control allocation based electronic stability control system for a conventional road vehicle. In Proceedings of the 2007 IEEE Intelligent Transportation Systems Conference, Seattle, WA, USA, 30 September–3 October 2007; pp. 514–521. [Google Scholar]
- Park, G.; Choi, S.B. Optimal brake distribution for electronic stability control using weighted least square allocation method. In Proceedings of the International Conference on Control, Automation and Systems, Gyeongju, Korea, 16–19 October 2016. [Google Scholar]
- Ferguson, S.A. The effectiveness of electronic stability control in reducing real-world crashes: A literature review. Traffic Inj. Prev. 2007, 8, 329–338. [Google Scholar] [CrossRef] [PubMed]
- Miller, J.I.; Cebon, D. A high performance pneumatic braking system for heavy vehicles. Veh. Syst. Dyn. 2010, 48, 373–392. [Google Scholar] [CrossRef]
- Maeda, K.; Fujimoto, H.; Hori, Y. Four-wheel driving-force distribution method based on driving stiffness and slip ratio estimation for electric vehicle with in-wheel motors. In Proceedings of the IEEE Vehicle Power and Propulsion Conference, Seoul, Korea, 9–12 October 2012. [Google Scholar]
- Carpa, D.; Galvagno, E.; Ondrak, V.; van Leeuwen, B.; Vigliani, A. An ABS control logic based on wheel force measurement. Veh. Syst. Dyn. 2012, 50, 1779–1796. [Google Scholar] [Green Version]
- Hoseinnezhad, R.; Bab-Hadiashar, A. Efficient antilock braking by direct maximization of tire-road frictions. IEEE Trans. Ind. Electron. 2011, 58, 3593–3600. [Google Scholar] [CrossRef]
- Kienhofer, F.W.; Cebon, D. An investigation of ABS strategies for articulated vehicles. In Proceedings of the International Symposium on Heavy Vehicle Weights and Dimensions “Loads, Roads and the Information Highway”, Johannesburg, South Africa, 14–18 March 2004. [Google Scholar]
- Miller, J.; Cebon, D. Modeling and performance of a pneumatic brake actuator. IMECHE Part C J. Mech. Eng. Sci. 2012, 226, 2077–2092. [Google Scholar] [CrossRef]
- Kim, S.; Jang, H. Tracking Performance of Brake Pressure Control. Available online: http://www.riss.kr/link?id=A76026370 (accessed on 12 July 2018).
- Hu, Z.; Liu, Y.-F.; Sen, P.C. Bang-bang charge control for LLC resonant converters. IEEE Trans. Power Electron. 2015, 30, 1093–1108. [Google Scholar]













© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Seo, M.; Yoo, C.; Park, S.-S.; Nam, K. Development of Wheel Pressure Control Algorithm for Electronic Stability Control (ESC) System of Commercial Trucks. Sensors 2018, 18, 2317. https://doi.org/10.3390/s18072317
Seo M, Yoo C, Park S-S, Nam K. Development of Wheel Pressure Control Algorithm for Electronic Stability Control (ESC) System of Commercial Trucks. Sensors. 2018; 18(7):2317. https://doi.org/10.3390/s18072317
Chicago/Turabian StyleSeo, Minjun, Changhee Yoo, Sang-Shin Park, and Kanghyun Nam. 2018. "Development of Wheel Pressure Control Algorithm for Electronic Stability Control (ESC) System of Commercial Trucks" Sensors 18, no. 7: 2317. https://doi.org/10.3390/s18072317
APA StyleSeo, M., Yoo, C., Park, S. -S., & Nam, K. (2018). Development of Wheel Pressure Control Algorithm for Electronic Stability Control (ESC) System of Commercial Trucks. Sensors, 18(7), 2317. https://doi.org/10.3390/s18072317