Partial Inductance Model of Induction Machines for Fault Diagnosis

 ,
,  ,
,  , ,
, ,  and
and
Abstract
:1. Introduction
- The conductor, instead of the coil, is used as the basic winding unit, which simplifies the modeling of arbitrarily complex winding layouts.
- The partial inductance of a single conductor, computed using the MVP, is taken as the characteristic function of the machine’s windings, instead of the winding functions based on the magnetomotive force (MMF) of the coils.
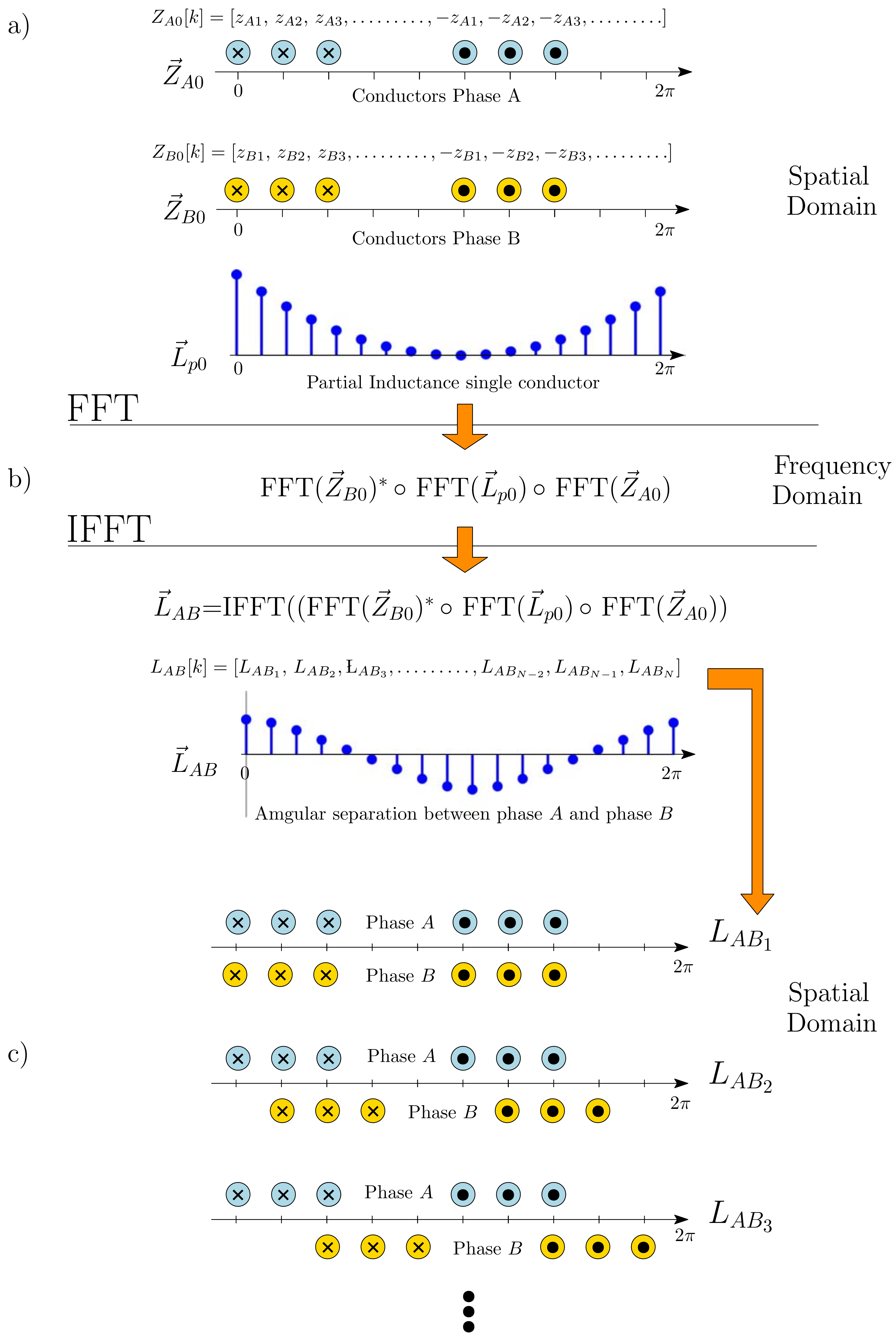
- A fast circular convolution, computed through the FFT, is used to obtain the mutual and self inductances of the phases, instead of solving the integral expressions of the winding functions for every rotor position.
2. Electro-Mechanical System of Equations of an Induction Machine
- There is negligible saturation.
- There is a uniform air-gap.
- The eddy currents are neglected. The windings are considered to be made of filamentary conductors placed on the external rotor surface or on the internal stator surface.
3. Phase Inductance as a Sum of the Conductors’ Partial Inductances
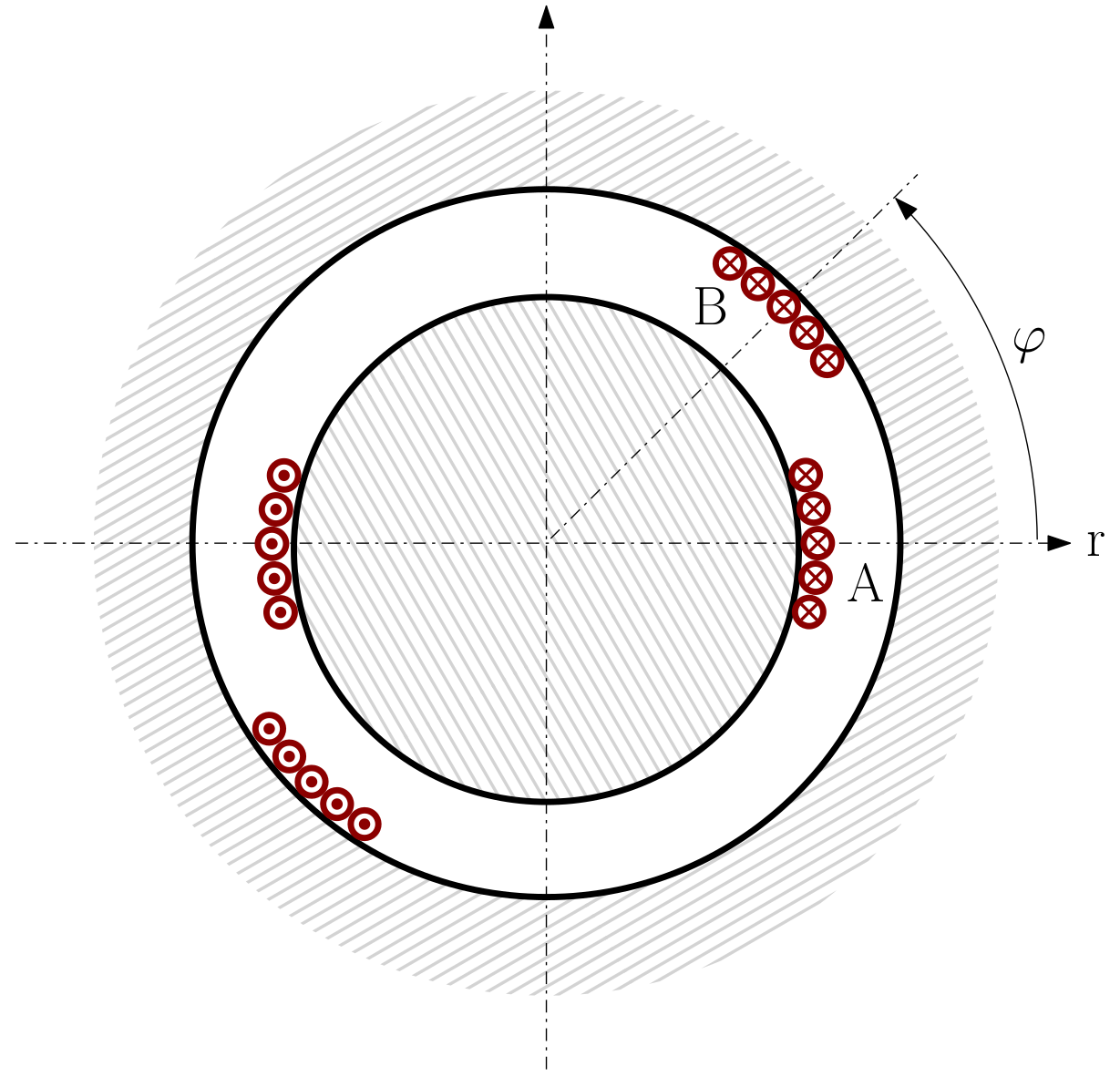
3.1. Partial Inductance between Axial Conductors
3.2. Discretization of the Expression of the Partial Inductance between Axial Conductors
4. Computation of the Mutual Inductances between Two Phases Based on the Partial Inductance between Two Axial Conductors
4.1. Vectors Containing the Distribution of Conductors of Phases A and B and the Partial Inductances between Two Axial Conductors
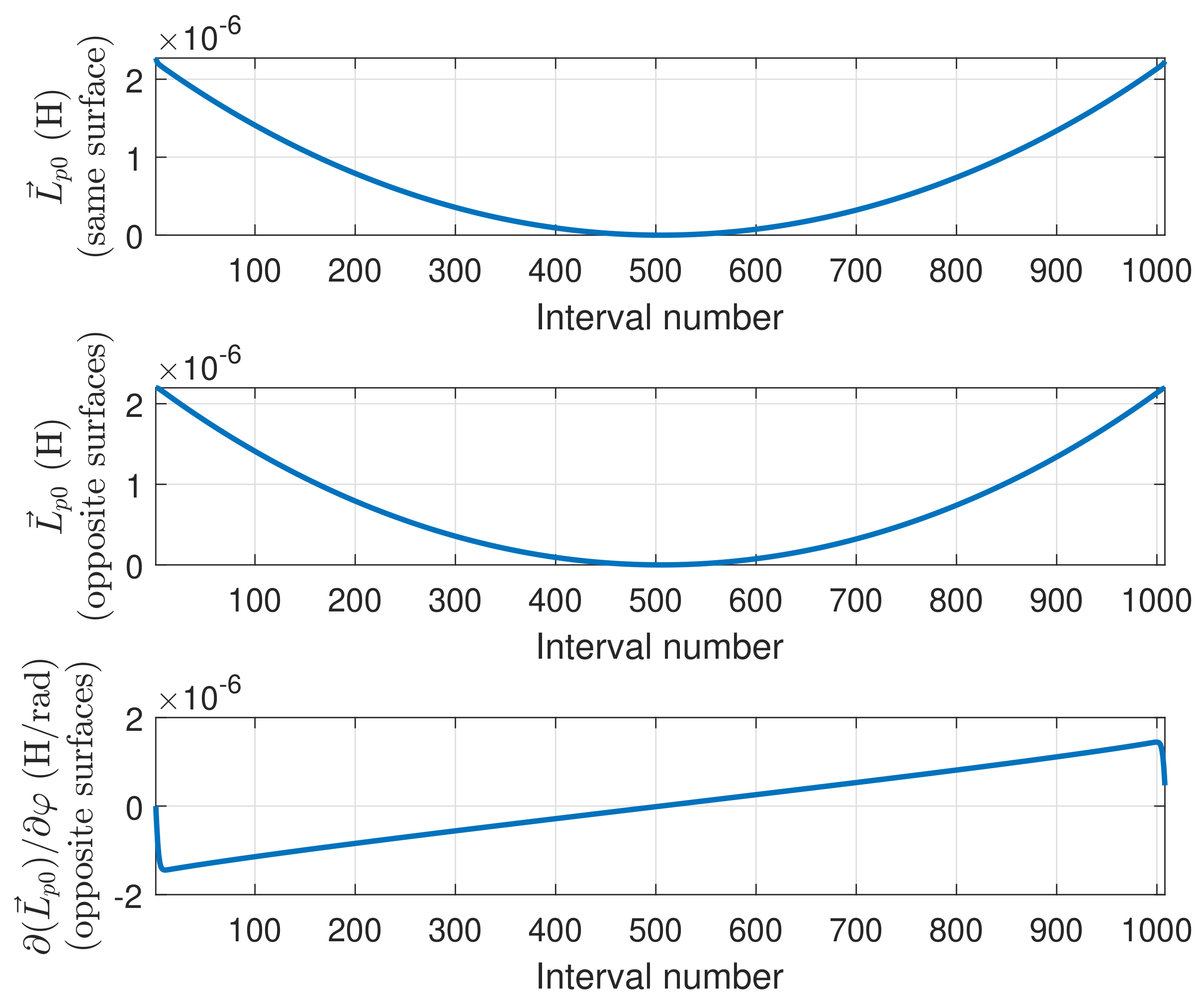
- The vector , whose element j, , contains the partial inductance between a conductor placed at the origin and other conductor placed at an angular position , using the corresponding Equation (32) (depending if both conductors are in the same surface or in opposite surfaces).
- The vector , whose element j, , contains the derivative with respect to the angular coordinate of the partial inductance between a conductor placed at the origin and other conductor placed at an angular position , using the corresponding Equation (35).
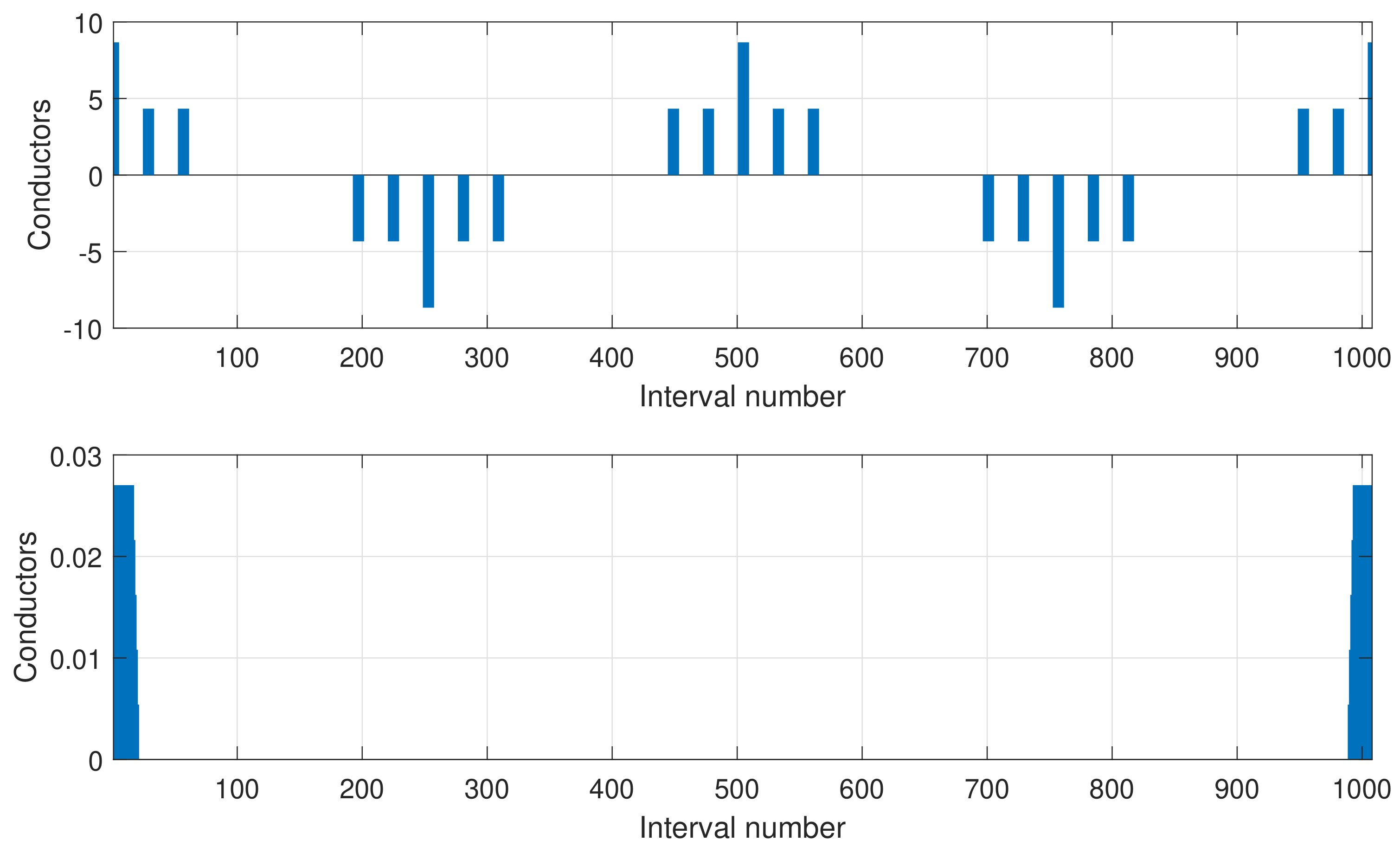
- The vector , whose element j, , contains the number of conductors of phase A located in the angular interval of length centered at position . The direction of the currents at each position is represented using positive and negative values, depending on the current directionIn the definition of , it is assumed that the axis of the distribution of conductors of the phase coincides with the origin of coordinates . If the phase is shifted by an angle , then all the elements of are shifted by , that is
- The vector , which contains the distribution in the airgap of the conductors of phase B, which is defined in the same way as vectorIn a similar way to the definition of , it is assumed that the axis of the distribution of conductors coincides with the origin of coordinates . If the phase is shifted by an angle , then all the elements of are shifted by , that is
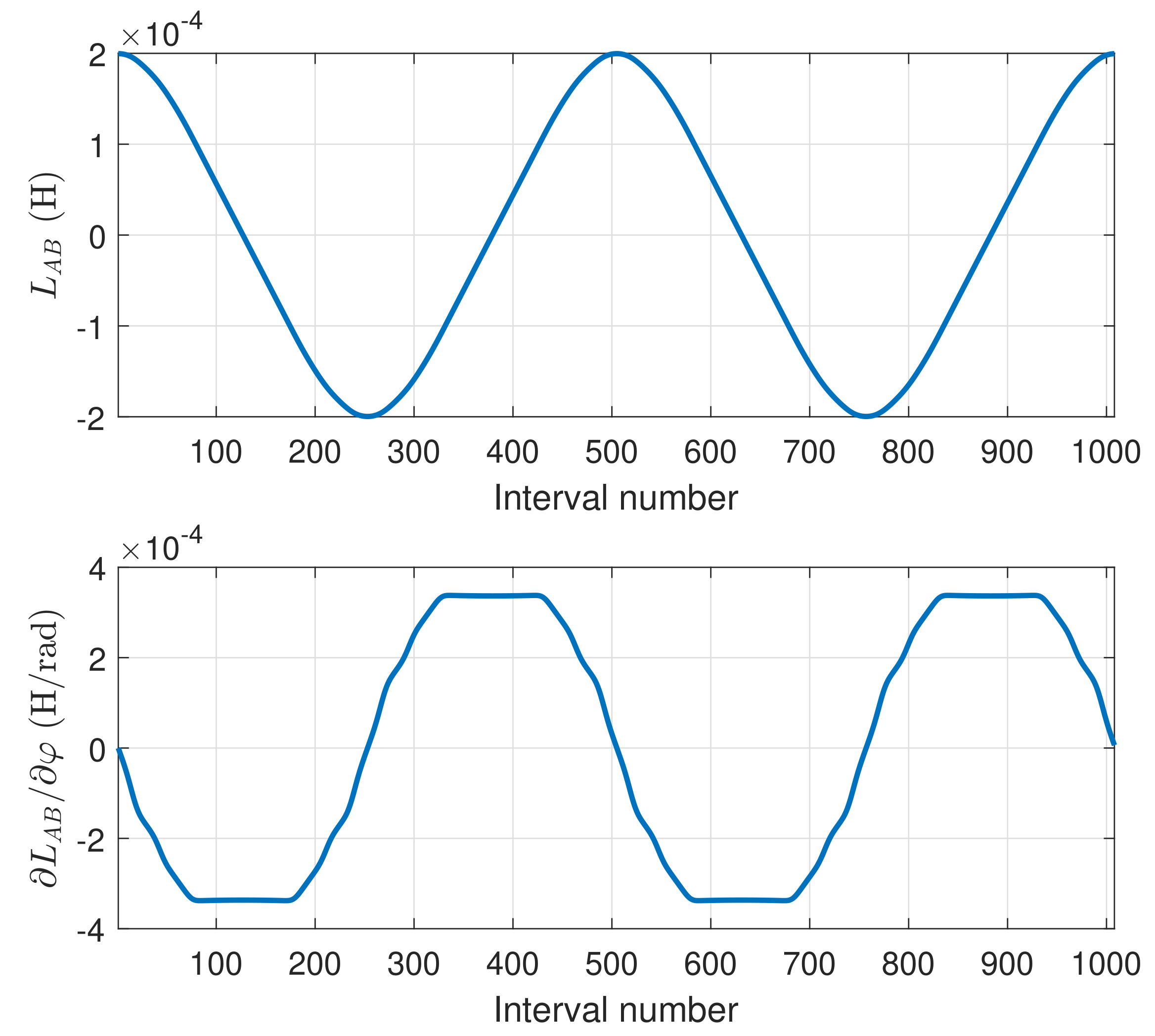
4.2. Vector Containing the Mutual Inductances between Phases A and B for All Their Relative Positions
4.3. Matrix Formulation of the Expression of the Mutual Inductance between Phases A and B
4.4. Computation of the Mutual Inductance between Phases A and B Using the FFT
5. Experimental Validation
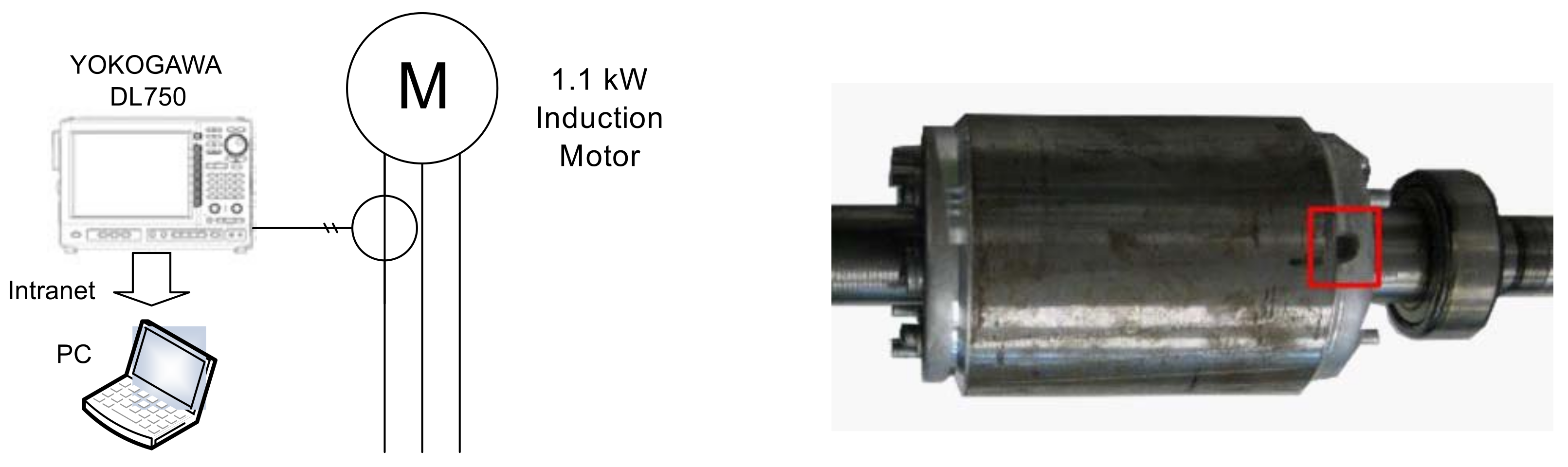
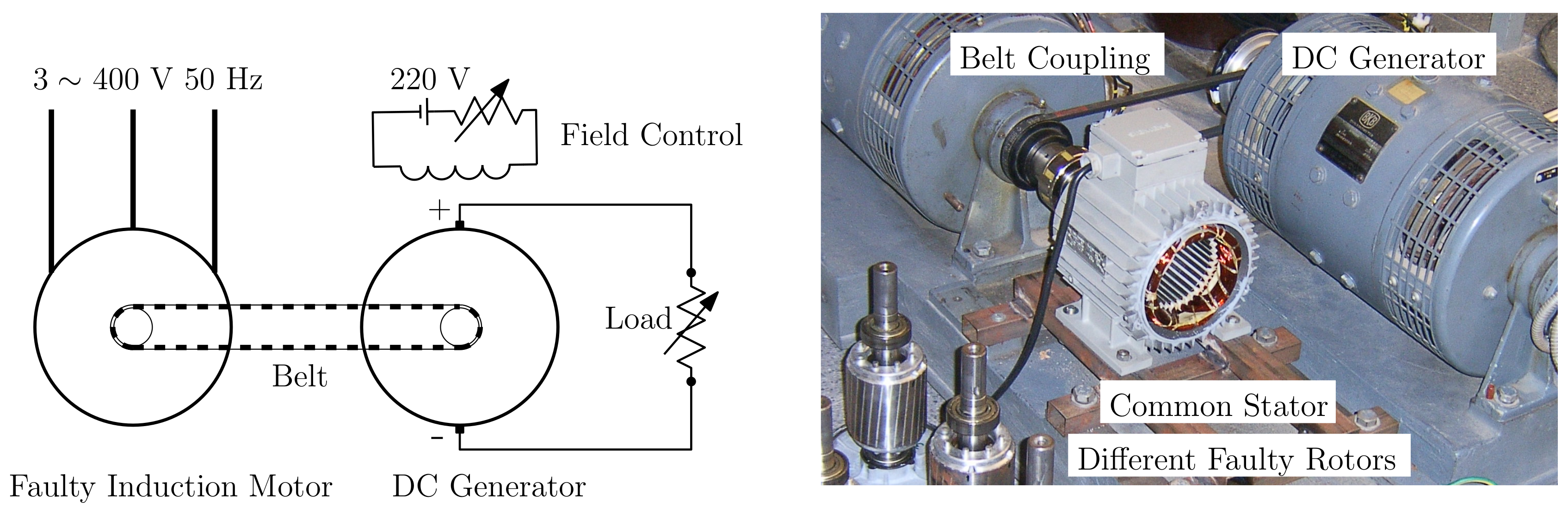
5.1. Experimental Setup
5.2. Model Setup
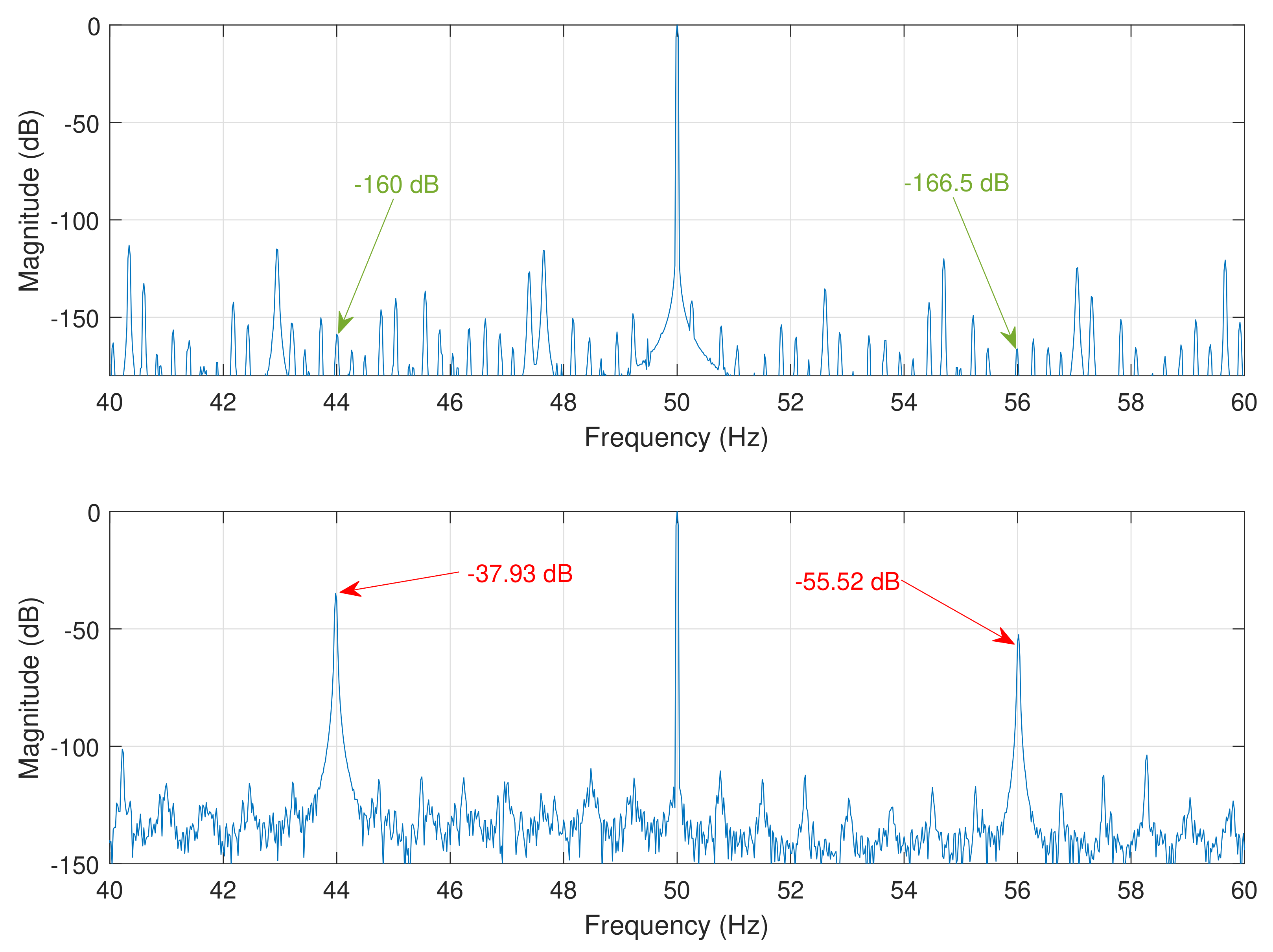
5.3. Diagnosis of a Single Broken Bar Fault
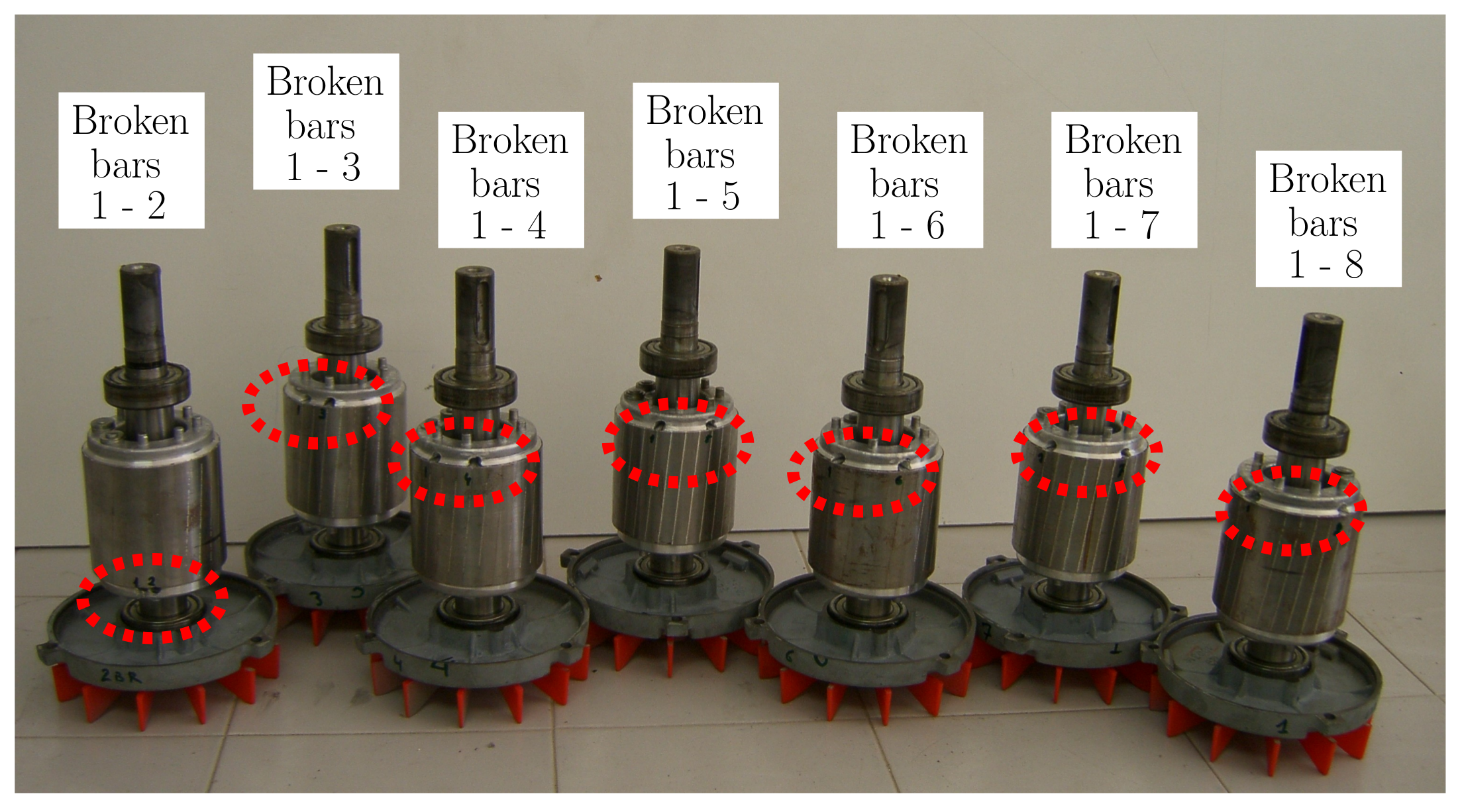
5.4. Diagnosis of a Double Breakage Fault with Non-Consecutive Broken Bars
- Seven rotors in healthy condition have been successively mounted and tested, to verify that there are no significant differences between the tested rotors.
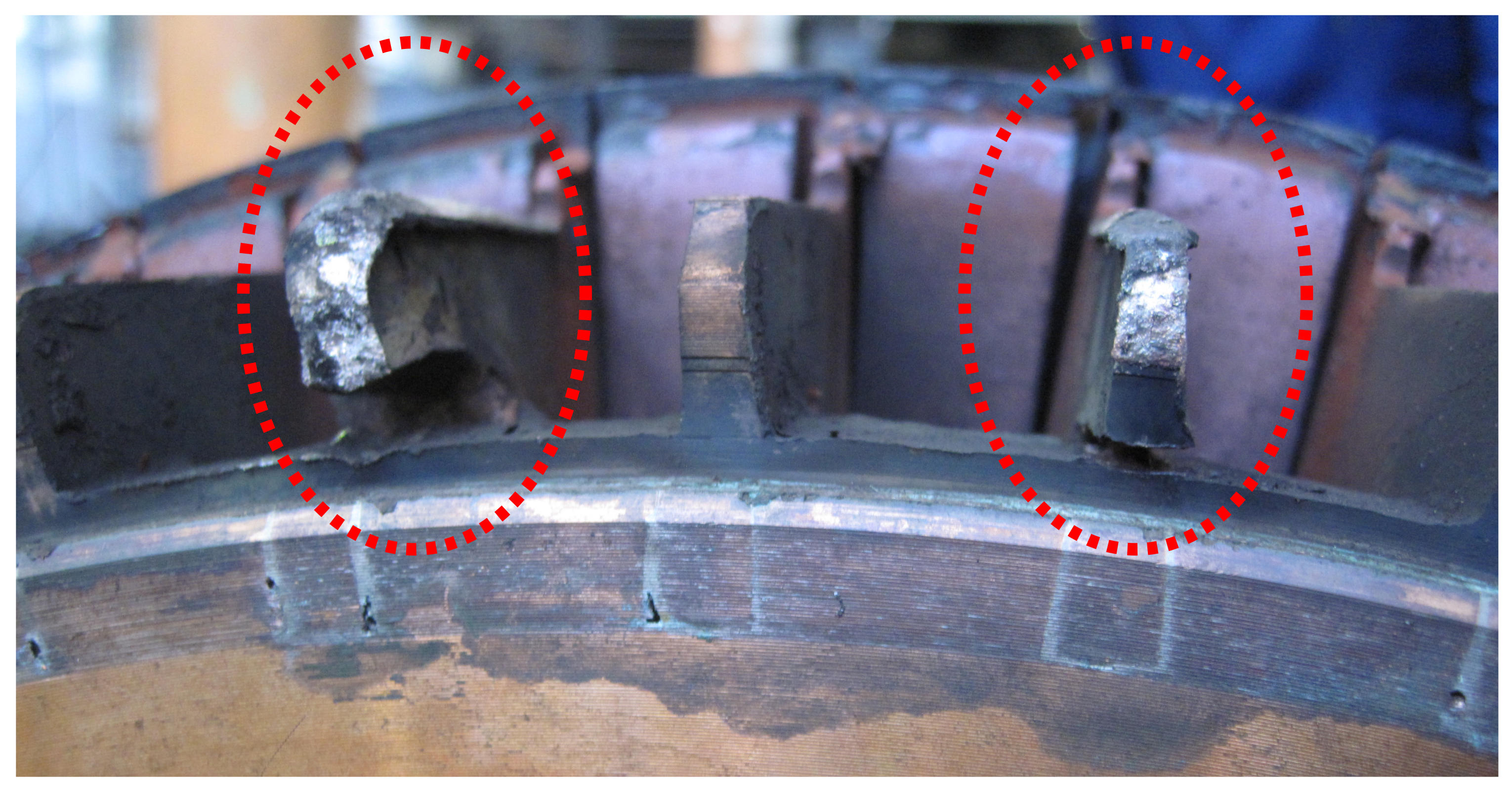
- A bar has been drilled in each of the rotors, denoted as bar. The motors have been tested at rated speed, and, using the spectrum of one of the stator phase currents, the magnitude of the LSH ( in Equation (52)) has been recorded.
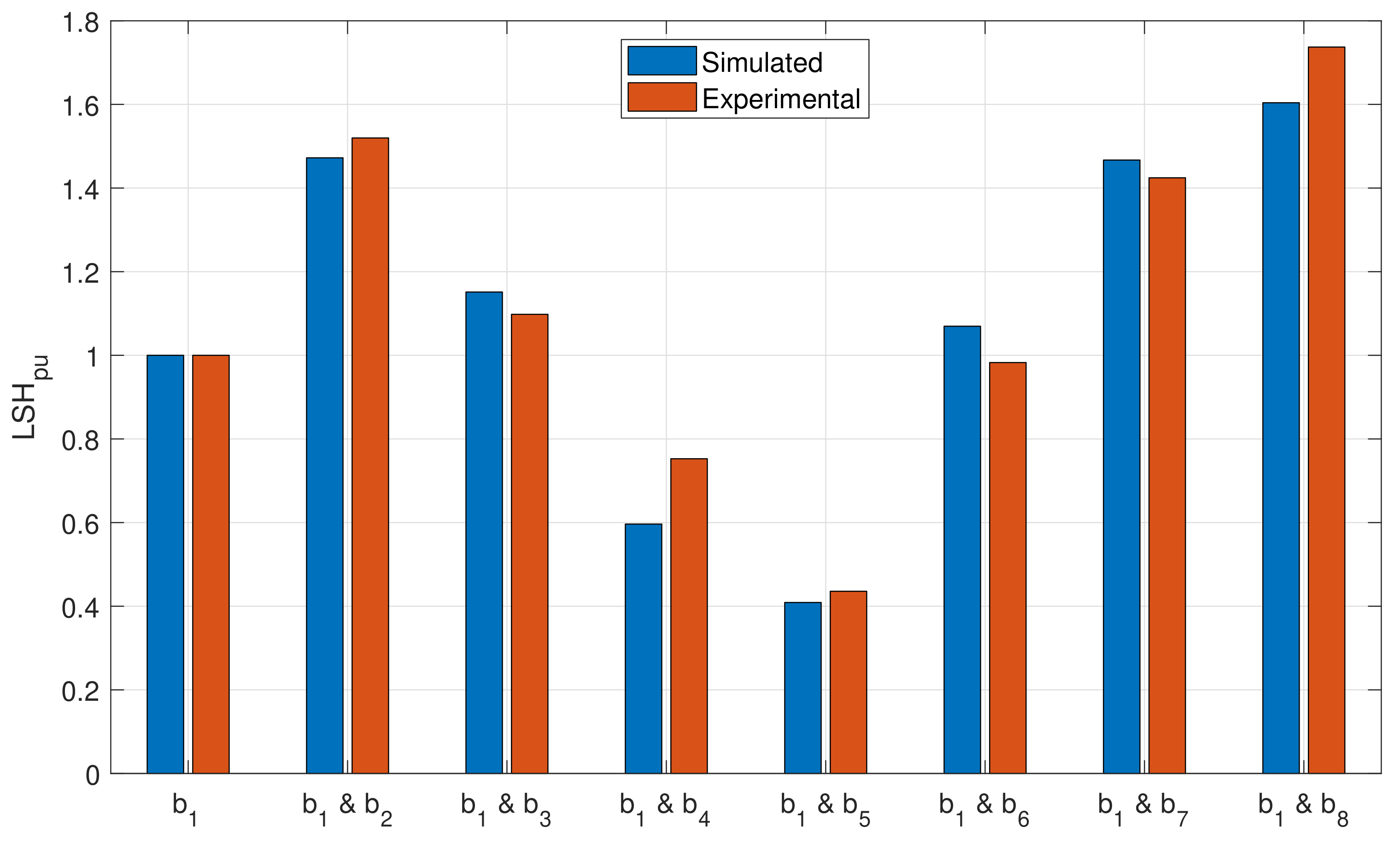
- Finally, the ratio has been computed for every rotor, and compared with the same value obtained with the simulated motor. The results are presented in Figure 17 and in Table 2. The time spent in each simulation (50 s in steady state) was 12 s, using a computer whose characteristic are given in Appendix C.
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. Commercial IM
Appendix B. Current Clamp
Appendix C. Computer Features
References
- Merizalde, Y.; Hernández-Callejo, L.; Duque-Perez, O. State of the Art and Trends in the Monitoring, Detection and Diagnosis of Failures in Electric Induction Motors. Energies 2017, 10, 1056. [Google Scholar] [CrossRef]
- Hossain, M.L.; Abu-Siada, A.; Muyeen, S.M. Methods for Advanced Wind Turbine Condition Monitoring and Early Diagnosis: A Literature Review. Energies 2018, 11, 1309. [Google Scholar] [CrossRef]
- Medina-García, J.; Sánchez-Rodríguez, T.; Galán, J.A.G.; Delgado, A.; Gómez-Bravo, F.; Jiménez, R. A Wireless Sensor System for Real-Time Monitoring and Fault Detection of Motor Arrays. Sensors 2017, 17, 469. [Google Scholar] [CrossRef] [PubMed]
- Pang, B.; Tang, G.; Tian, T.; Zhou, C. Rolling Bearing Fault Diagnosis Based on an Improved HTT Transform. Sensors 2018, 18. [Google Scholar]
- Liu, Y.; Bazzi, A.M. A review and comparison of fault detection and diagnosis methods for squirrel-cage induction motors: State of the art. ISA Trans. 2017, 70, 400–409. [Google Scholar] [CrossRef] [PubMed]
- Artigao, E.; Koukoura, S.; Honrubia-Escribano, A.; Carroll, J.; McDonald, A.; Gómez-Lázaro, E. Current Signature and Vibration Analyses to Diagnose an In-Service Wind Turbine Drive Train. Energies 2018, 11, 960. [Google Scholar] [CrossRef]
- Glowacz, A.; Glowacz, Z. Diagnosis of the three-phase induction motor using thermal imaging. Infrared Phys. Technol. 2017, 81, 7–16. [Google Scholar] [CrossRef]
- Glowacz, A.; Glowacz, W.; Glowacz, Z.; Kozik, J. Early fault diagnosis of bearing and stator faults of the single-phase induction motor using acoustic signals. Measurement 2018, 113, 1–9. [Google Scholar] [CrossRef]
- Glowacz, A.; Glowacz, Z. Diagnosis of stator faults of the single-phase induction motor using acoustic signals. Appl. Acoust. 2017, 117, 20–27. [Google Scholar] [CrossRef]
- Cablea, G.; Granjon, P.; Bèrenguer, C. Three-phase electrical signals analysis for mechanical faults monitoring in rotating machine systems. Mech. Syst. Signal Process. 2017, 92, 278–292. [Google Scholar] [CrossRef]
- Li, D.Z.; Wang, W.; Ismail, F. A Spectrum Synch Technique for Induction Motor Health Condition Monitoring. IEEE Trans. Energy Convers. 2015, 30, 1348–1355. [Google Scholar] [CrossRef]
- Samanta, A.K.; Naha, A.; Routray, A.; Deb, A.K. Fast and accurate spectral estimation for online detection of partial broken bar in induction motors. Mech. Syst. Signal Process. 2018, 98, 63–77. [Google Scholar] [CrossRef]
- Sapena-Bano, A.; Pineda-Sanchez, M.; Puche-Panadero, R.; Martinez-Roman, J.; Kanovic, Z. Low-Cost Diagnosis of Rotor Asymmetries in Induction Machines Working at a Very Low Slip Using the Reduced Envelope of the Stator Current. IEEE Trans. Energy Convers. 2015, 30, 1409–1419. [Google Scholar] [CrossRef]
- Mustafa, M.O.; Nikolakopoulos, G.; Gustafsson, T.; Kominiak, D. A fault detection scheme based on minimum identified uncertainty bounds violation for broken rotor bars in induction motors. Control Eng. Pract. 2016, 48, 63–77. [Google Scholar] [CrossRef]
- Gritli, Y.; Rossi, C.; Casadei, D.; Filippetti, F.; Capolino, G.A. A Diagnostic Space Vector-Based Index for Rotor Electrical Fault Detection in Wound-Rotor Induction Machines Under Speed Transient. IEEE Trans. Ind. Electron. 2017, 64, 3892–3902. [Google Scholar] [CrossRef]
- Ojaghi, M.; Yazdandoost, N. Oil-Whirl Fault Modeling, Simulation, and Detection in Sleeve Bearings of Squirrel Cage Induction Motors. IEEE Trans. Energy Convers. 2015, 30, 1537–1545. [Google Scholar] [CrossRef]
- Faiz, J.; Moosavi, S. Eccentricity fault detection - From induction machines to DFIG—A review. Renew. Sustain. Energy Rev. 2016, 55, 169–179. [Google Scholar] [CrossRef]
- Bayram, D.; Seker, S. Redundancy-Based Predictive Fault Detection on Electric Motors by Stationary Wavelet Transform. IEEE Trans. Ind. Appl. 2017, 53, 2997–3004. [Google Scholar] [CrossRef]
- Maraaba, L.; Al-Hamouz, Z.; Abido, M. An Efficient Stator Inter-Turn Fault Diagnosis Tool for Induction Motors. Energies 2018, 11. [Google Scholar] [CrossRef]
- Nguyen, V.; Seshadrinath, J.; Wang, D.; Nadarajan, S.; Vaiyapuri, V. Model-Based Diagnosis and RUL Estimation of Induction Machines Under Interturn Fault. IEEE Trans. Ind. Appl. 2017, 53, 2690–2701. [Google Scholar] [CrossRef]
- Barzegaran, M.; Mazloomzadeh, A.; Mohammed, O.A. Fault Diagnosis of the Asynchronous Machines Through Magnetic Signature Analysis Using Finite-Element Method and Neural Networks. IEEE Trans. Energy Convers. 2013, 28, 1064–1071. [Google Scholar] [CrossRef]
- Surya, G.N.; Khan, Z.J.; Ballal, M.S.; Suryawanshi, H.M. A Simplified Frequency-Domain Detection of Stator Turn Fault in Squirrel-Cage Induction Motors Using an Observer Coil Technique. IEEE Trans. Ind. Electron. 2017, 64, 1495–1506. [Google Scholar] [CrossRef]
- Jung, J.; Lee, S.B.; Lim, C.; Cho, C.H.; Kim, K. Electrical Monitoring of Mechanical Looseness for Induction Motors With Sleeve Bearings. IEEE Trans. Energy Convers. 2016, 31, 1377–1386. [Google Scholar] [CrossRef]
- Lu, S.; He, Q.; Yuan, T.; Kong, F. Online Fault Diagnosis of Motor Bearing via Stochastic-Resonance-Based Adaptive Filter in an Embedded System. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 1111–1122. [Google Scholar] [CrossRef]
- Elbouchikhi, E.; Choqueuse, V.; Amirat, Y.; Benbouzid, M.E.H.; Turri, S. An Efficient Hilbert-Huang Transform-Based Bearing Faults Detection in Induction Machines. IEEE Trans. Energy Convers. 2017, 32, 401–413. [Google Scholar] [CrossRef]
- Elbouchikhi, E.; Choqueuse, V.; Benbouzid, M. Induction machine bearing faults detection based on a multi-dimensional MUSIC algorithm and maximum likelihood estimation. ISA Trans. 2016, 63, 413–424. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ottewill, J.; Ruszczyk, A.; Broda, D. Monitoring tooth profile faults in epicyclic gearboxes using synchronously averaged motor currents: Mathematical modeling and experimental validation. Mech. Syst. Signal Process. 2017, 84, 78–99. [Google Scholar] [CrossRef]
- Burriel-Valencia, J.; Puche-Panadero, R.; Martinez-Roman, J.; Sapena-Bano, A.; Pineda-Sanchez, M. Short-Frequency Fourier Transform for Fault Diagnosis of Induction Machines Working in Transient Regime. IEEE Trans. Instrum. Meas. 2017, 66, 432–440. [Google Scholar] [CrossRef] [Green Version]
- Mustafa, M.O.; Varagnolo, D.; Nikolakopoulos, G.; Gustafsson, T. Detecting broken rotor bars in induction motors with model-based support vector classifiers. Control Eng. Pract. 2016, 52, 15–23. [Google Scholar] [CrossRef]
- Ojaghi, M.; Aghmasheh, R.; Sabouri, M. Model-based exact technique to identify type and degree of eccentricity faults in induction motors. IET Electr. Power Appl. 2016, 10, 706–713. [Google Scholar] [CrossRef]
- Mojallal, A.; Lotfifard, S. Multi-Physics Graphical Model based Fault Detection and Isolation in Wind Turbines. IEEE Trans. Smart Grid 2017, 1. [Google Scholar] [CrossRef]
- Singh, A.; Grant, B.; DeFour, R.; Sharma, C.; Bahadoorsingh, S. A review of induction motor fault modeling. Electr. Power Syst. Res. 2016, 133, 191–197. [Google Scholar] [CrossRef]
- Go, Y.; Song, M.H.; Kim, J.Y.; Choi, W.; Lee, B.; Kim, K.M. A New Algorithm for Analyzing Method of Electrical Faults of Three-Phase Induction Motors Using Duty Ratios of Half-Period Frequencies According to Phase Angle Changes. In Mechatronics and Robotics Engineering for Advanced and Intelligent Manufacturing; Zhang, D., Wei, B., Eds.; Springer: Cham, Switzerland, 2017; pp. 303–317. [Google Scholar]
- Strous, T.D.; Wang, X.; Polinder, H.; Ferreira, J.A. Evaluating Harmonic Distortions in Brushless Doubly Fed Induction Machines. IEEE Trans. Magn. 2017, 53, 1–10. [Google Scholar] [CrossRef]
- Berzoy, A.; Mohamed, A.A.S.; Mohammed, O. Impact of Inter-Turn Short-Circuit Location on Induction Machines Parameters Through FE Computations. IEEE Trans. Magn. 2017, 53, 1–4. [Google Scholar] [CrossRef]
- Tavana, N.R.; Dinavahi, V. Real-Time Nonlinear Magnetic Equivalent Circuit Model of Induction Machine on FPGA for Hardware-in-the-Loop Simulation. IEEE Trans. Energy Convers. 2016, 31, 520–530. [Google Scholar] [CrossRef]
- Guezmil, A.; Berriri, H.; Pusca, R.; Sakly, A.; Romary, R.; Mimouni, M.F. Detecting Inter-Turn Short-Circuit Fault in Induction Machine Using High-Order Sliding Mode Observer: Simulation and Experimental Verification. J. Control Autom. Electr. Syst. 2017, 28, 532–540. [Google Scholar] [CrossRef]
- Jandaghi, B.; Dinavahi, V. Hardware-in-the-Loop Emulation of Linear Induction Motor Drive for MagLev Application. IEEE Trans. Plasma Sci. 2016, 44, 679–686. [Google Scholar] [CrossRef]
- Sun, W.; Zhao, R.; Yan, R.; Shao, S.; Chen, X. Convolutional Discriminative Feature Learning for Induction Motor Fault Diagnosis. IEEE Trans. Ind. Inform. 2017, 13, 1350–1359. [Google Scholar] [CrossRef]
- Sun, W.; Shao, S.; Zhao, R.; Yan, R.; Zhang, X.; Chen, X. A sparse auto-encoder-based deep neural network approach for induction motor faults classification. Measurement 2016, 89, 171–178. [Google Scholar] [CrossRef]
- Pietrowski, W. Detection of time-varying inter-turn short-circuit in a squirrel cage induction machine by means of generalized regression neural network. COMPEL Int. J. Comput. Math. Electr. Electron. Eng. 2017, 36, 289–297. [Google Scholar] [CrossRef]
- Yin, Z.; Hou, J. Recent advances on SVM based fault diagnosis and process monitoring in complicated industrial processes. Neurocomputing 2016, 174, 643–650. [Google Scholar] [CrossRef]
- Chudasama, K.; Shah, V.; Shah, S. Induction Motor Relaying Scheme for External Faults Detection and Classification Using Subtractive Clustering Based Sugeno Fuzzy Inference System. Electr. Power Compon. Syst. 2016, 44, 1149–1162. [Google Scholar] [CrossRef]
- Mezani, S.; Hamiti, T.; Belguerras, L.; Lubin, T.; Gerada, C. Computation of Wound Rotor Induction Machines Based on Coupled Finite Elements and Circuit Equation Under a First Space Harmonic Approximation. IEEE Trans. Magn. 2016, 52, 1–4. [Google Scholar] [CrossRef]
- Rezaee-Alam, F.; Rezaeealam, B.; Faiz, J. Unbalanced Magnetic Force Analysis in Eccentric Surface Permanent-Magnet Motors Using an Improved Conformal Mapping Method. IEEE Trans. Energy Convers. 2017, 32, 146–154. [Google Scholar] [CrossRef]
- Ajily, E.; Ardebili, M.; Abbaszadeh, K. Magnet Defect and Rotor Eccentricity Modeling in Axial-Flux Permanent-Magnet Machines via 3-D Field Reconstruction Method. IEEE Trans. Energy Convers. 2016, 31, 486–495. [Google Scholar] [CrossRef]
- Ojaghi, M.; Daliri, S. Analytic Model for Performance Study and Computer-Aided Design of Single-Phase Shaded-Pole Induction Motors. IEEE Trans. Energy Convers. 2017, 32, 649–657. [Google Scholar] [CrossRef]
- Amrhein, M.; Krein, P.T. Induction Machine Modeling Approach Based on 3-D Magnetic Equivalent Circuit Framework. IEEE Trans. Energy Convers. 2010, 25, 339–347. [Google Scholar] [CrossRef]
- Fourati, A.; Bourdon, A.; Feki, N.; Rémond, D.; Chaari, F.; Haddar, M. Angular-based modeling of induction motors for monitoring. J. Sound Vib. 2017, 395, 371–392. [Google Scholar] [CrossRef]
- Kiselychnyk, O.; Bodson, M.; Wang, J. Comparison of Two Magnetic Saturation Models of Induction Machines and Experimental Validation. IEEE Trans. Ind. Electron. 2017, 64, 81–90. [Google Scholar] [CrossRef]
- Berzoy, A.; Mohamed, A.A.S.; Mohammed, O. Complex-Vector Model of Interturn Failure in Induction Machines for Fault Detection and Identification. IEEE Trans. Ind. Appl. 2017, 53, 2667–2678. [Google Scholar] [CrossRef]
- Hafner, M.; Popescu, M.; Boglietti, A.; Cavagnino, A. Analytic Modeling of Inverter-Fed Induction Machines—A Practical Approach for Matching Measurement and Simulation Data. IEEE Trans. Ind. Appl. 2016, 52, 4710–4718. [Google Scholar] [CrossRef]
- Oumaamar, M.E.K.; Maouche, Y.; Boucherma, M.; Khezzar, A. Static air-gap eccentricity fault diagnosis using rotor slot harmonics in line neutral voltage of three-phase squirrel cage induction motor. Mech. Syst. Signal Process. 2017, 84, 584–597. [Google Scholar] [CrossRef]
- Toliyat, H.A.; Lipo, T.A.; White, J.C. Analysis of a concentrated winding induction machine for adjustable speed drive applications. I. Motor analysis. IEEE Trans. Energy Convers. 1991, 6, 679–683. [Google Scholar] [CrossRef]
- Ojaghi, M.; Faiz, J. Extension to Multiple Coupled Circuit Modeling of Induction Machines to Include Variable Degrees of Saturation Effects. IEEE Trans. Magn. 2008, 44, 4053–4056. [Google Scholar] [CrossRef]
- El Malek, M.A.; Abdelsalam, A.K.; Hassan, O.E. Induction motor broken rotor bar fault location detection through envelope analysis of start-up current using Hilbert transform. Mech. Syst. Signal Process. 2017, 93, 332–350. [Google Scholar] [CrossRef]
- Cheng, M.; Han, P.; Hua, W. General Airgap Field Modulation Theory for Electrical Machines. IEEE Trans. Ind. Electron. 2017, 64, 6063–6074. [Google Scholar] [CrossRef]
- Joksimovic, G. Parameterized dynamic model of cage induction machine. In Proceedings of the 2016 XXII International Conference on Electrical Machines (ICEM), Lausanne, Switzerland, 4–7 September 2016; pp. 513–518. [Google Scholar]
- Paul, C.R. The Concept of Partial Inductance. In Inductance: Loop and Partial; Wiley-IEEE Press: Hoboken, NJ, USA, 2010; pp. 195–245. [Google Scholar]
- Holloway, C.L.; Kuester, E.F.; Ruehli, A.E.; Antonini, G. Partial and Internal Inductance: Two of Clayton R. Paul’s Many Passions. IEEE Trans. Electromagn. Compat. 2013, 55, 600–613. [Google Scholar] [CrossRef]
- Ni, C.; Zhao, Z.; Cui, X. Partial Inductance of Conductor Segments With Coulomb Gauge in Quasi-Static Field. IEEE Trans. Electromagn. Compat. 2017, 59, 1125–1132. [Google Scholar] [CrossRef]
- Romano, D.; Antonini, G.; Ruehli, A.E. Time-Domain Partial Element Equivalent Circuit Solver Including Non-Linear Magnetic Materials. IEEE Trans. Magn. 2016, 52, 1–11. [Google Scholar] [CrossRef]
- Nguyen, T.S.; Duc, T.L.; Tran, T.S.; Guichon, J.M.; Chadebec, O.; Meunier, G. Adaptive Multipoint Model Order Reduction Scheme for Large-Scale Inductive PEEC Circuits. IEEE Trans. Electromagn. Compat. 2017, 59, 1143–1151. [Google Scholar] [CrossRef]
- Bauernfeind, T.; Baumgartner, P.; Biro, O.; Magele, C.; Preis, K.; Torchio, R. PEEC-Based Multi-Objective Synthesis of Non-Uniformly Spaced Linear Antenna Arrays. IEEE Trans. Magn. 2017, 53, 1–4. [Google Scholar] [CrossRef]
- Martinho, L.B.; Siau, J.; Bannwarth, B.; Guichon, J.M.; Chadebec, O.; Meunier, G.; Silva, V.C. Generalized PEEC Analysis of Inductive Coupling Phenomena in a Transmission Line Right-of-Way. IEEE Trans. Magn. 2016, 52, 1–4. [Google Scholar] [CrossRef]
- Cao, Y.S.; Makharashvili, T.; Cho, J.; Bai, S.; Connor, S.; Archambeault, B.; Jiang, L.; Ruehli, A.E.; Fan, J.; Drewniak, J.L. Inductance Extraction for PCB Prelayout Power Integrity Using PMSR Method. IEEE Trans. Electromagn. Compat. 2017, 59, 1339–1346. [Google Scholar] [CrossRef]
- Naderi, P. Modified magnetic-equivalent-circuit approach for various faults studying in saturable double-cage-induction machines. IET Electr. Power Appl. 2017, 11, 1224–1234. [Google Scholar] [CrossRef]
- Bortolozzi, M.; Tessarolo, A.; Bruzzese, C. Analytical Computation of End-Coil Leakage Inductance of Round-Rotor Synchronous Machines Field Winding. IEEE Trans. Magn. 2016, 52, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Ojaghi, M.; Nasiri, S. Modeling Eccentric Squirrel-Cage Induction Motors With Slotting Effect and Saturable Teeth Reluctances. IEEE Trans. Energy Convers. 2014, 29, 619–627. [Google Scholar] [CrossRef]
- Hague, B. The Principles of Electromagnetism Applied to Electrical Machines; Dover: New York, NY, USA, 1962. [Google Scholar]
- Hoeijmakers, M.J. An Induction Machine Model Based on Analytic Two-Dimensional Field Computations. In Proceedings of the Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM 2004), Anacapri, Italy, 16–18 June 2004; pp. 43–48. [Google Scholar]
- Sapena-Bano, A.; Martinez-Roman, J.; Puche-Panadero, R.; Pineda-Sanchez, M.; Perez-Cruz, J.; Riera-Guasp, M. Induction machine model with space harmonics for fault diagnosis based on the convolution theorem. Int. J. Electr. Power Energy Syst. 2018, 100, 463–481. [Google Scholar] [CrossRef]
- Riera-Guasp, M.; Cabanas, M.F.; Antonino-Daviu, J.A.; Pineda-Sanchez, M.; García, C.H.R. Influence of Nonconsecutive Bar Breakages in Motor Current Signature Analysis for the Diagnosis of Rotor Faults in Induction Motors. IEEE Trans. Energy Convers. 2010, 25, 80–89. [Google Scholar] [CrossRef] [Green Version]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Healthy Motor | Faulty Motor | |||
|---|---|---|---|---|
| LSH | USH | LSH | USH | |
| Experimental | −63.03 dB | −69.43 dB | −32.69 dB | −52.39 dB |
| Simulated | −160 dB | −166.5 dB | −37.93 dB | −55.52 dB |
| Experimental | Simulated | |
|---|---|---|
| Single broken bar () | 1 | 1 |
| Broken bars & | 1.52 | 1.472 |
| Broken bars & | 1.098 | 1.151 |
| Broken bars & | 0.7527 | 0.5965 |
| Broken bars & | 0.4358 | 0.4089 |
| Broken bars & | 0.9827 | 0 1.07 |
| Broken bars & | 1.425 | 1.467 |
| Broken bars & | 1.737 | 1.604 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pineda-Sanchez, M.; Puche-Panadero, R.; Martinez-Roman, J.; Sapena-Bano, A.; Riera-Guasp, M.; Perez-Cruz, J. Partial Inductance Model of Induction Machines for Fault Diagnosis. Sensors 2018, 18, 2340. https://doi.org/10.3390/s18072340
Pineda-Sanchez M, Puche-Panadero R, Martinez-Roman J, Sapena-Bano A, Riera-Guasp M, Perez-Cruz J. Partial Inductance Model of Induction Machines for Fault Diagnosis. Sensors. 2018; 18(7):2340. https://doi.org/10.3390/s18072340
Chicago/Turabian StylePineda-Sanchez, Manuel, Ruben Puche-Panadero, Javier Martinez-Roman, Angel Sapena-Bano, Martin Riera-Guasp, and Juan Perez-Cruz. 2018. "Partial Inductance Model of Induction Machines for Fault Diagnosis" Sensors 18, no. 7: 2340. https://doi.org/10.3390/s18072340
APA StylePineda-Sanchez, M., Puche-Panadero, R., Martinez-Roman, J., Sapena-Bano, A., Riera-Guasp, M., & Perez-Cruz, J. (2018). Partial Inductance Model of Induction Machines for Fault Diagnosis. Sensors, 18(7), 2340. https://doi.org/10.3390/s18072340