A Gyroscope Bias Estimation Algorithm Based on Map Specific Information


Abstract
:1. Introduction
2. Algorithm Introduction
2.1. Method
2.2. Formula Derivation
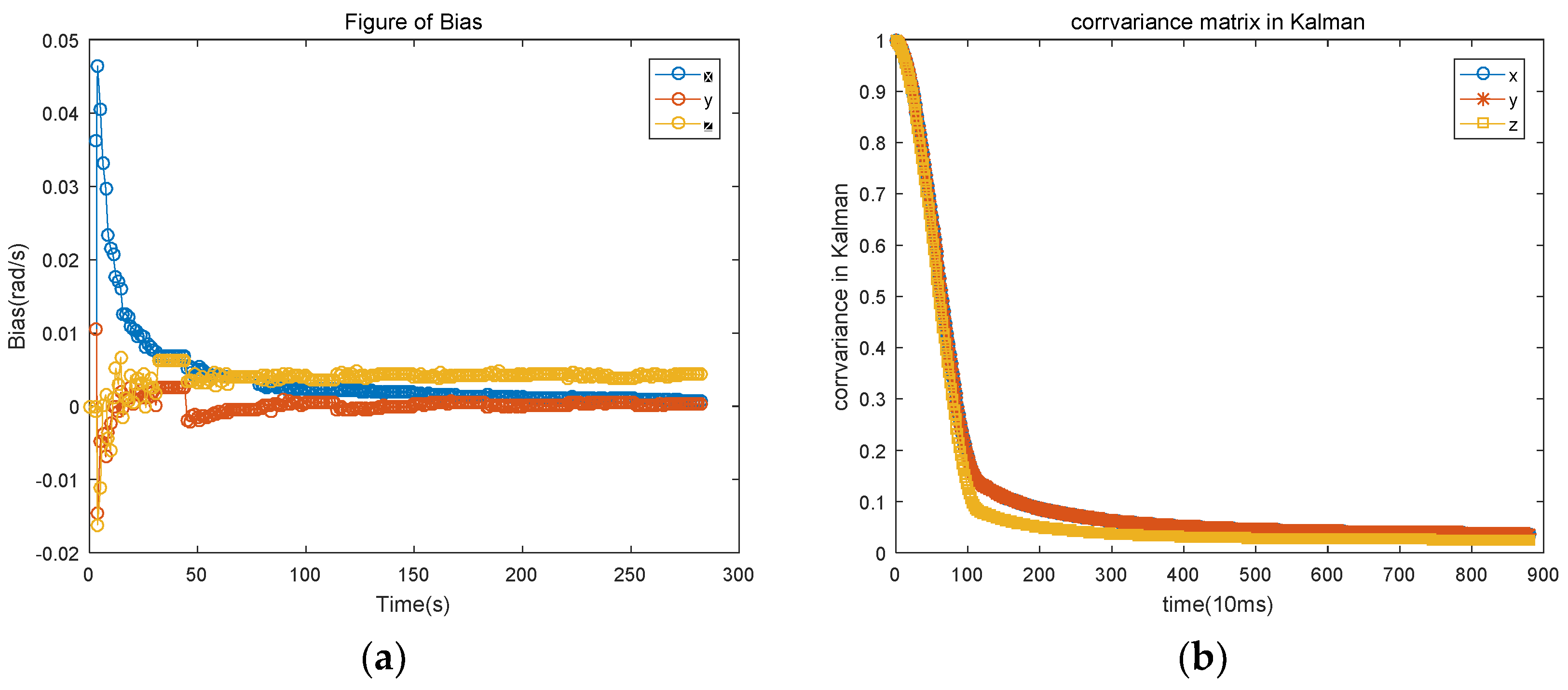
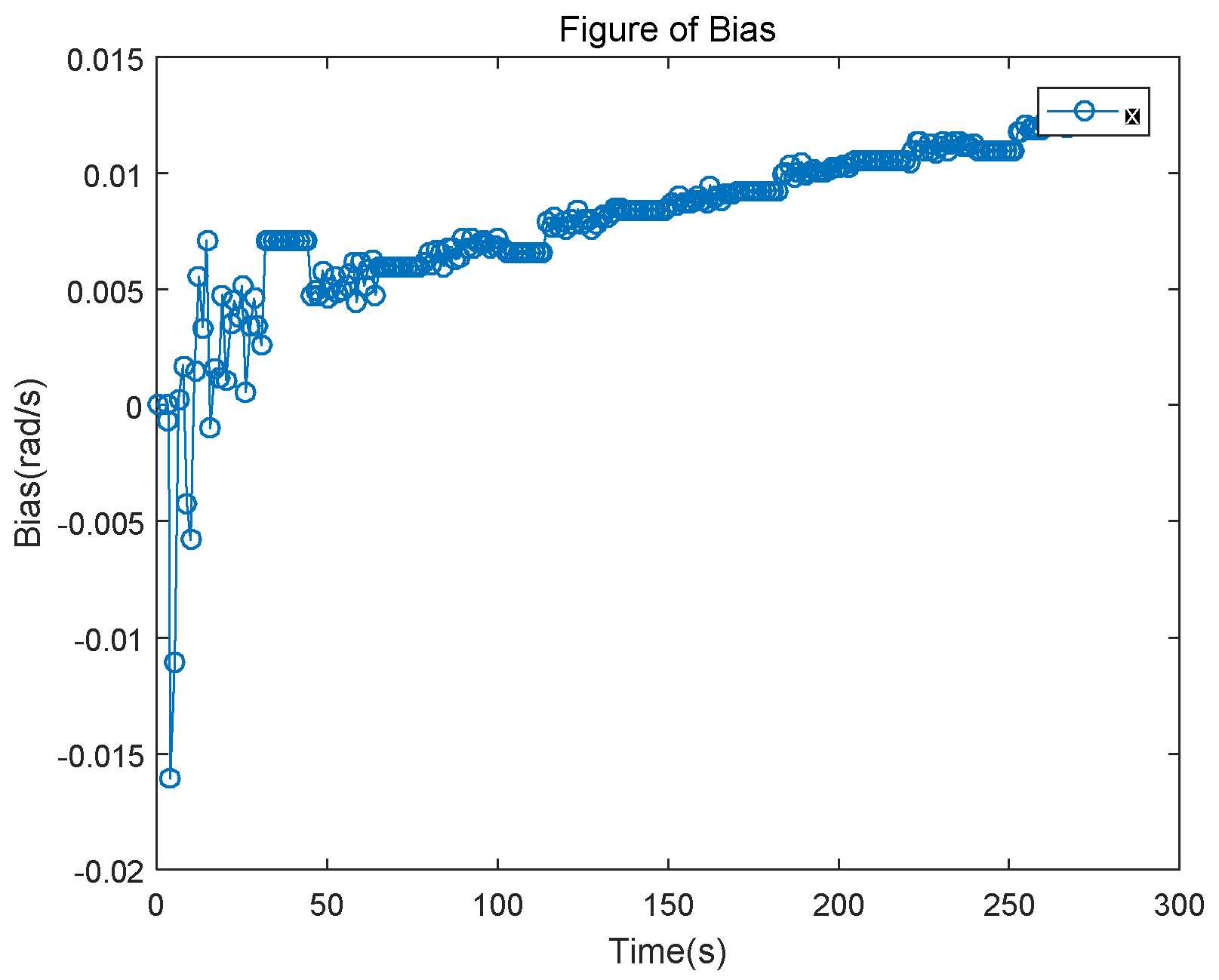
2.3. Filter Design and Error Analysis
2.4. Methods for Obtaining Observations
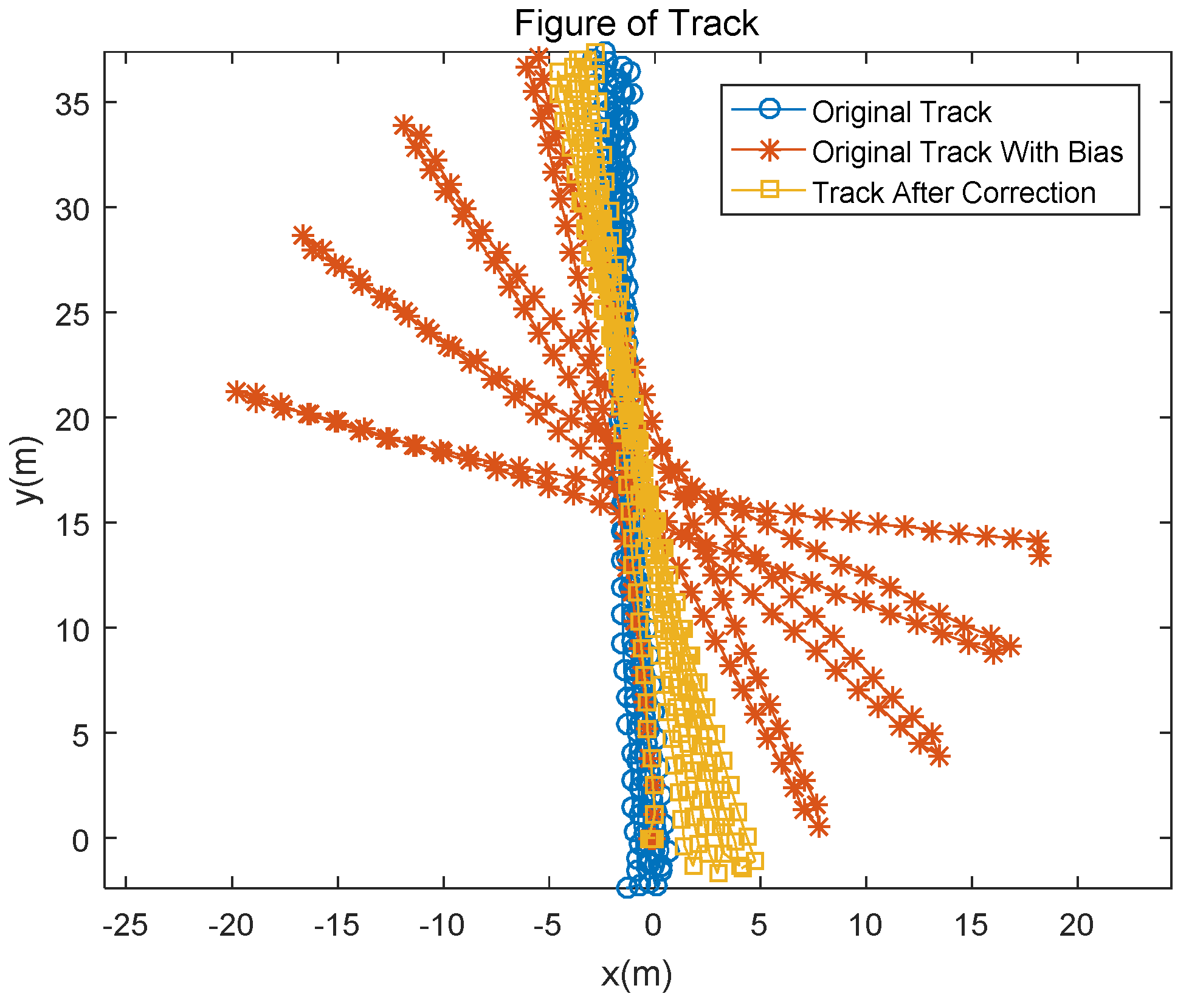
3. Experiment
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
References
- Zheng, Q.; Dong, L.; Lee, D.H.; Gao, Z. Active disturbance rejection control for MEMS gyroscopes. IEEE Trans. Control Syst. Technol. 2009, 17, 1432–1438. [Google Scholar] [CrossRef]
- Vik, B.; Shiriaev, A.; Fossen, T.I. Nonlinear observer design for integration of DGPS and INS. In New Directions in Nonlinear Observer Design; Springer: London, UK, 1999; pp. 135–159. [Google Scholar]
- Boskovic, J.D.; Li, S.M.; Mehra, R.K. Fault tolerant control of spacecraft in the presence of sensor bias. In Proceedings of the 2000 American Control Conference, Chicago, IL, USA, 28–30 June 2000; Voume 2, pp. 1205–1209. [Google Scholar]
- Boskovic, J.D.; Li, S.M.; Mehra, R.K. A globally stable scheme for spacecraft control in the presence of sensor bias. In Proceedings of the 2000 Aerospace Conference Proceedings, Big Sky, MT, USA, 25 March 2000; Volume 3, pp. 505–511. [Google Scholar]
- Yuan, B.; Liao, D.; Han, S. Error compensation of an optical gyro INS by multi-axis rotation. Meas. Sci. Technol. 2012, 23, 025102. [Google Scholar] [CrossRef]
- Wu, Z.; Sun, Z.; Zhang, W.; Chen, Q. Attitude and gyro bias estimation by the rotation of an inertial measurement unit. Meas. Sci. Technol. 2015, 26, 125102. [Google Scholar] [CrossRef] [Green Version]
- Thienel, J.; Sanner, R.M. A coupled nonlinear spacecraft attitude controller and observer with an unknown constant gyro bias and gyro noise. IEEE Trans. Autom. Control 2003, 48, 2011–2015. [Google Scholar] [CrossRef]
- Benallegue, A.; Chitour, Y.; Tayebi, A. Adaptive Attitude Tracking Control of Rigid Body Systems with Unknown Inertia and Gyro-bias. IEEE Trans. Autom. Control 2018. [CrossRef]
- Grip, H.F.; Fossen, T.I.; Johansen, T.A.; Saberi, A. Globally exponentially stable attitude and gyro bias estimation with application to GNSS/INS integration. Automatica 2015, 51, 158–166. [Google Scholar] [CrossRef]
- Yang, Y.; Farrell, J.A. Two antennas GPS-aided INS for attitude determination. IEEE Trans. Control Syst. Technol. 2003, 11, 905–918. [Google Scholar] [CrossRef]
- Crassidis, J.L. Sigma-point Kalman filtering for integrated GPS and inertial navigation. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 750–756. [Google Scholar] [CrossRef]
- De Vries, W.H.K.; Veeger, H.E.J.; Baten, C.T.M.; van der Helm, F.C.T. Magnetic distortion in motion labs, implications for validating inertial magnetic sensors. Gait Posture 2009, 29, 535–541. [Google Scholar] [CrossRef] [PubMed]
- Palermo, E.; Rossi, S.; Patanè, F.; Cappa, P. Experimental evaluation of indoor magnetic distortion effects on gait analysis performed with wearable inertial sensors. Physiol. Meas. 2014, 35, 399. [Google Scholar] [CrossRef] [PubMed]
- Chowdhary, G.; Johnson, E.N.; Magree, D.; Wu, A.; Shein, A. GPS-denied Indoor and Outdoor Monocular Vision Aided Navigation and Control of Unmanned Aircraft. J. Field Robot. 2013, 30, 415–438. [Google Scholar] [CrossRef]
- Afzal, M.H.; Renaudin, V.; Lachapelle, G. Use of earth’s magnetic field for mitigating gyroscope errors regardless of magnetic perturbation. Sensors 2011, 11, 11390–11414. [Google Scholar] [CrossRef] [PubMed]
- Titterton, D.; Weston, J.L. Strapdown Inertial Navigation Technology; The Institution of Engineering and Technology: London, UK; The American Institute of Aeronautics: Reston, VA, USA, 2004; pp. 42–43, 315–322. [Google Scholar]
- Diebel, J. Representing attitude: Euler angles, unit quaternions, and rotation vectors. Matrix 2006, 58, 1–35. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
| Original Path (m) | Noise Path (m) | Corrected Path (m) | |
|---|---|---|---|
| Drift Mean | 0 | 7.10 | 1.75 |
| Median drift | 0 | 5.30 | 1.21 |
| Total drift | 0 | 1746.60 | 428.09 |
| Positioning error | 2.75 | 22.70 | 5.88 |
| Original Path (m) | Noise Path (m) | Corrected Path (m) | |
|---|---|---|---|
| Drift Mean | 0 | 7.10 | 1.32 |
| Median drift | 0 | 5.30 | 1.00 |
| Total drift | 0 | 1746.60 | 325.34 |
| Positioning error | 2.75 | 22.70 | 4.34 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tan, T.; Peng, A.; Huang, J.; Zheng, L.; Ou, G. A Gyroscope Bias Estimation Algorithm Based on Map Specific Information. Sensors 2018, 18, 2534. https://doi.org/10.3390/s18082534
Tan T, Peng A, Huang J, Zheng L, Ou G. A Gyroscope Bias Estimation Algorithm Based on Map Specific Information. Sensors. 2018; 18(8):2534. https://doi.org/10.3390/s18082534
Chicago/Turabian StyleTan, Tian, Ao Peng, Junjun Huang, Lingxiang Zheng, and Gang Ou. 2018. "A Gyroscope Bias Estimation Algorithm Based on Map Specific Information" Sensors 18, no. 8: 2534. https://doi.org/10.3390/s18082534
APA StyleTan, T., Peng, A., Huang, J., Zheng, L., & Ou, G. (2018). A Gyroscope Bias Estimation Algorithm Based on Map Specific Information. Sensors, 18(8), 2534. https://doi.org/10.3390/s18082534