A Real-Time Imaging Algorithm Based on Sub-Aperture CS-Dechirp for GF3-SAR Data




Abstract
:1. Introduction
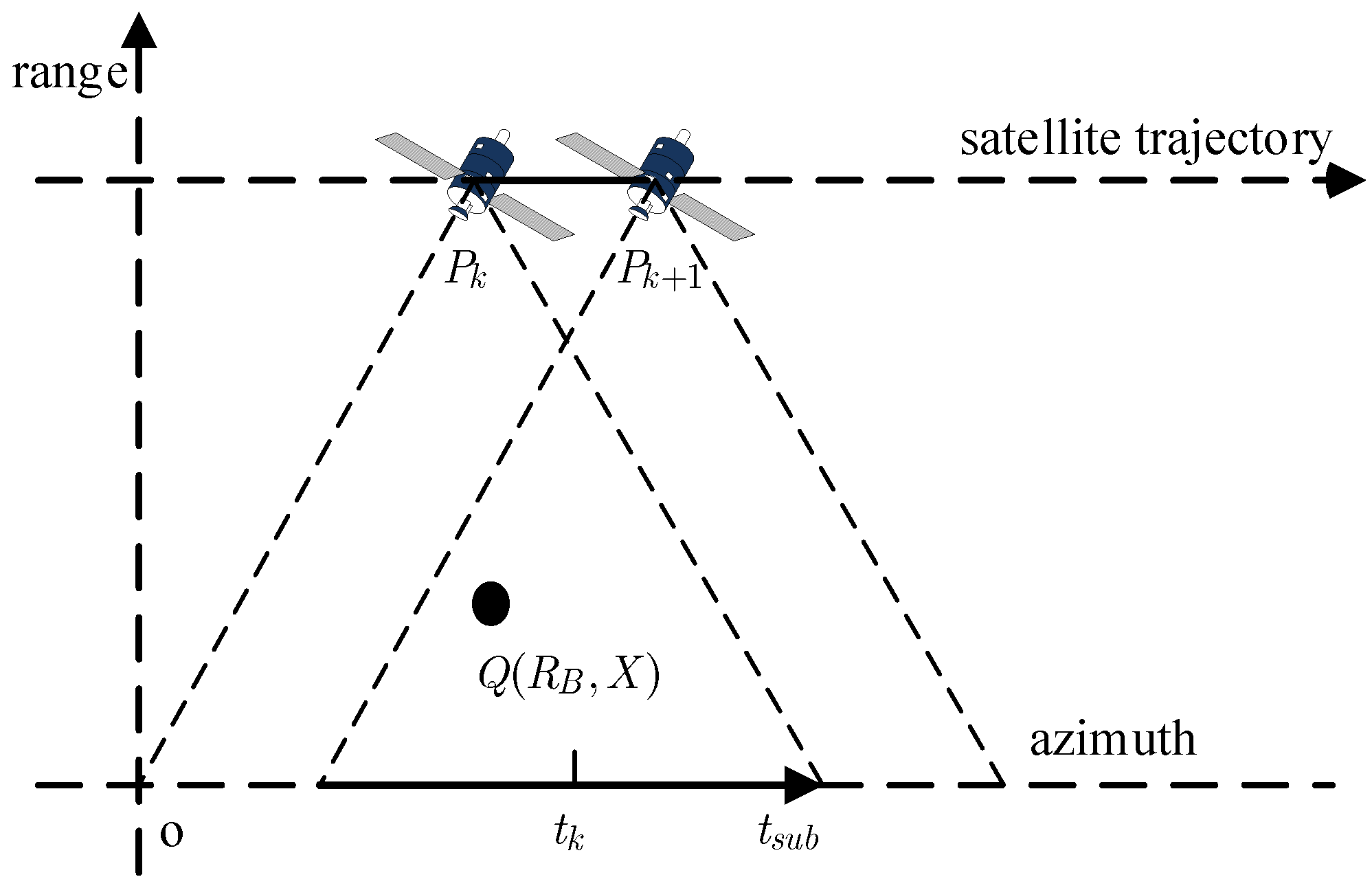
2. Sub-Aperture Signal Model
3. Real-Time Imaging Algorithm Based on Sub-Aperture CS-Dechirp
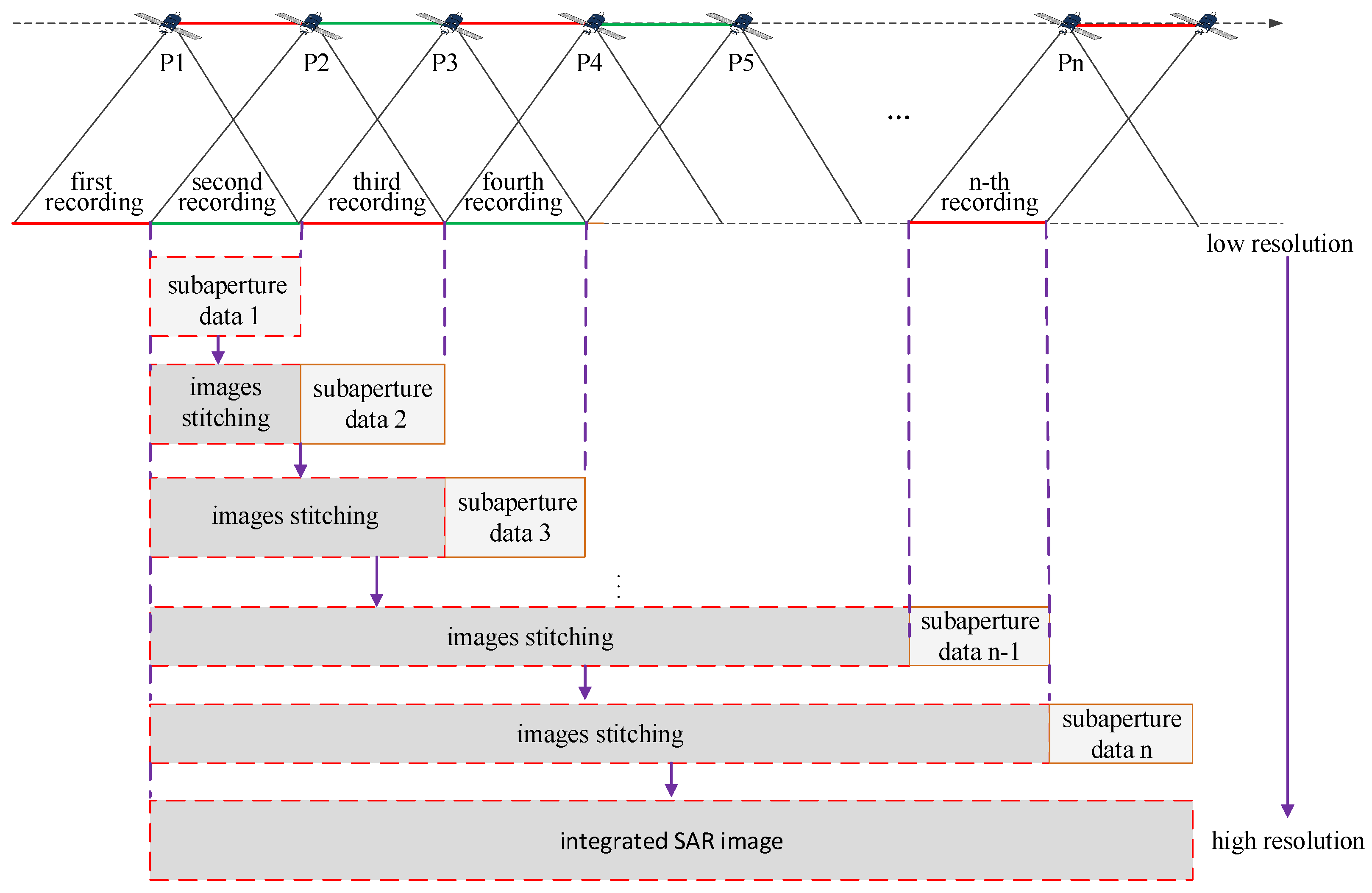
3.1. Description of Real-Time Imaging Algorithm
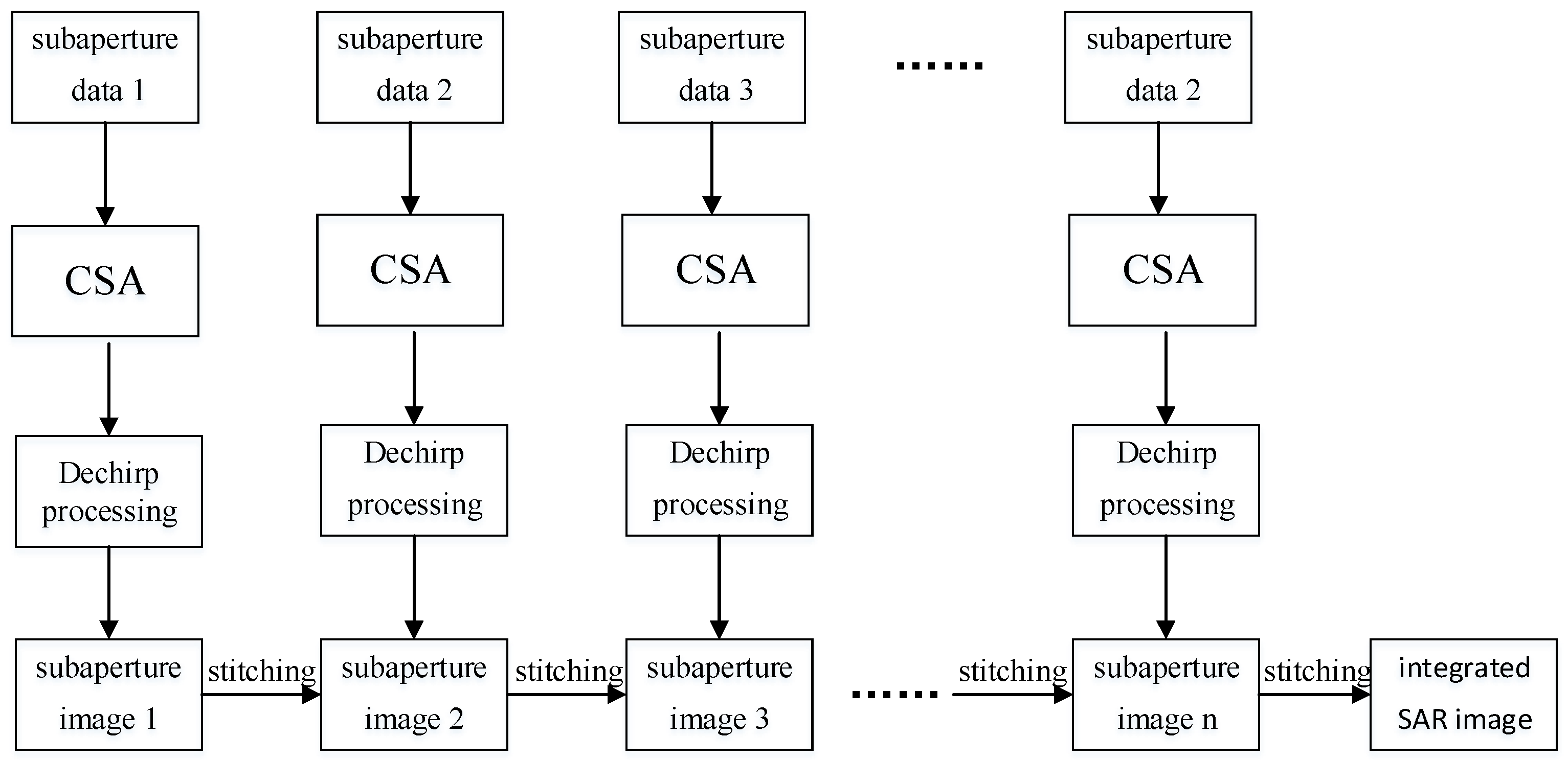
3.2. Data Processing Based on CS-Dechirp Algorithm
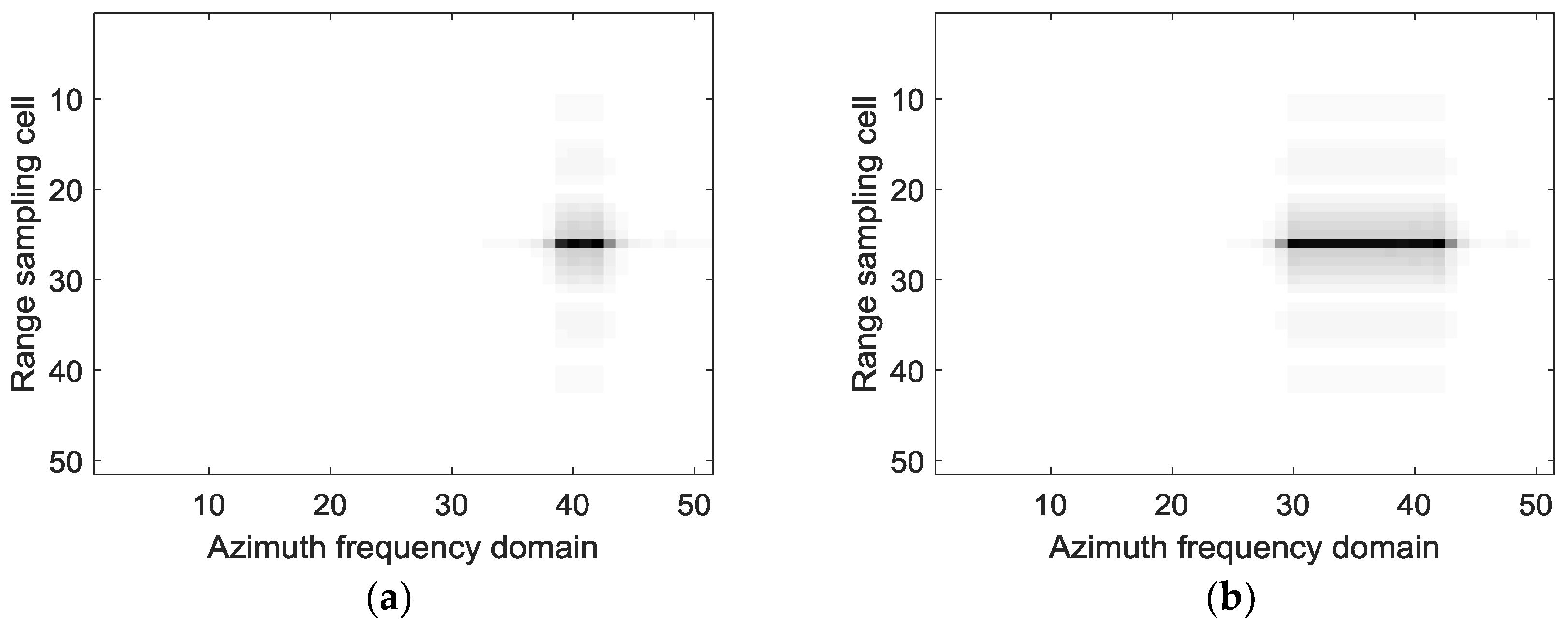
3.2.1. Sub-Aperture CSA
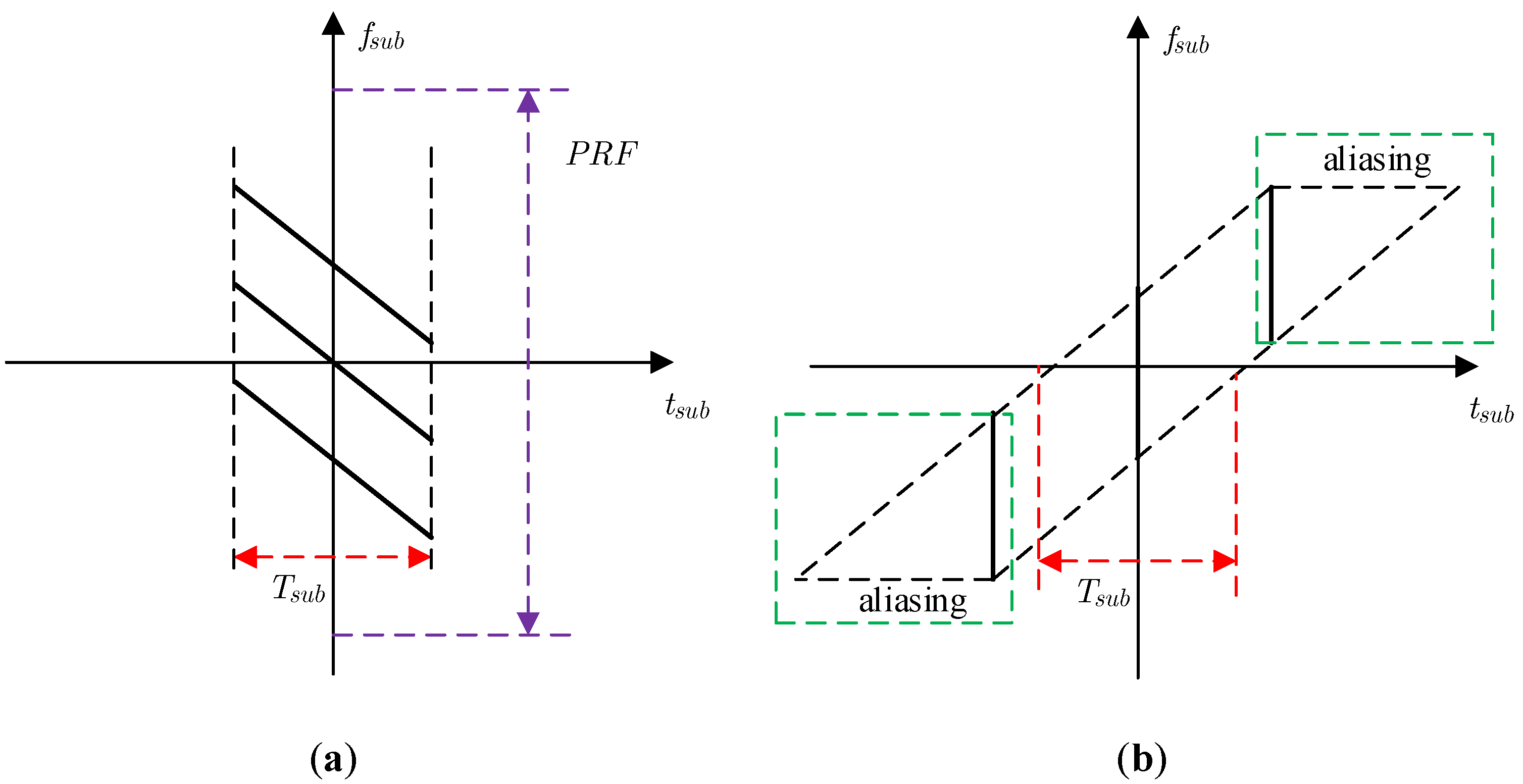
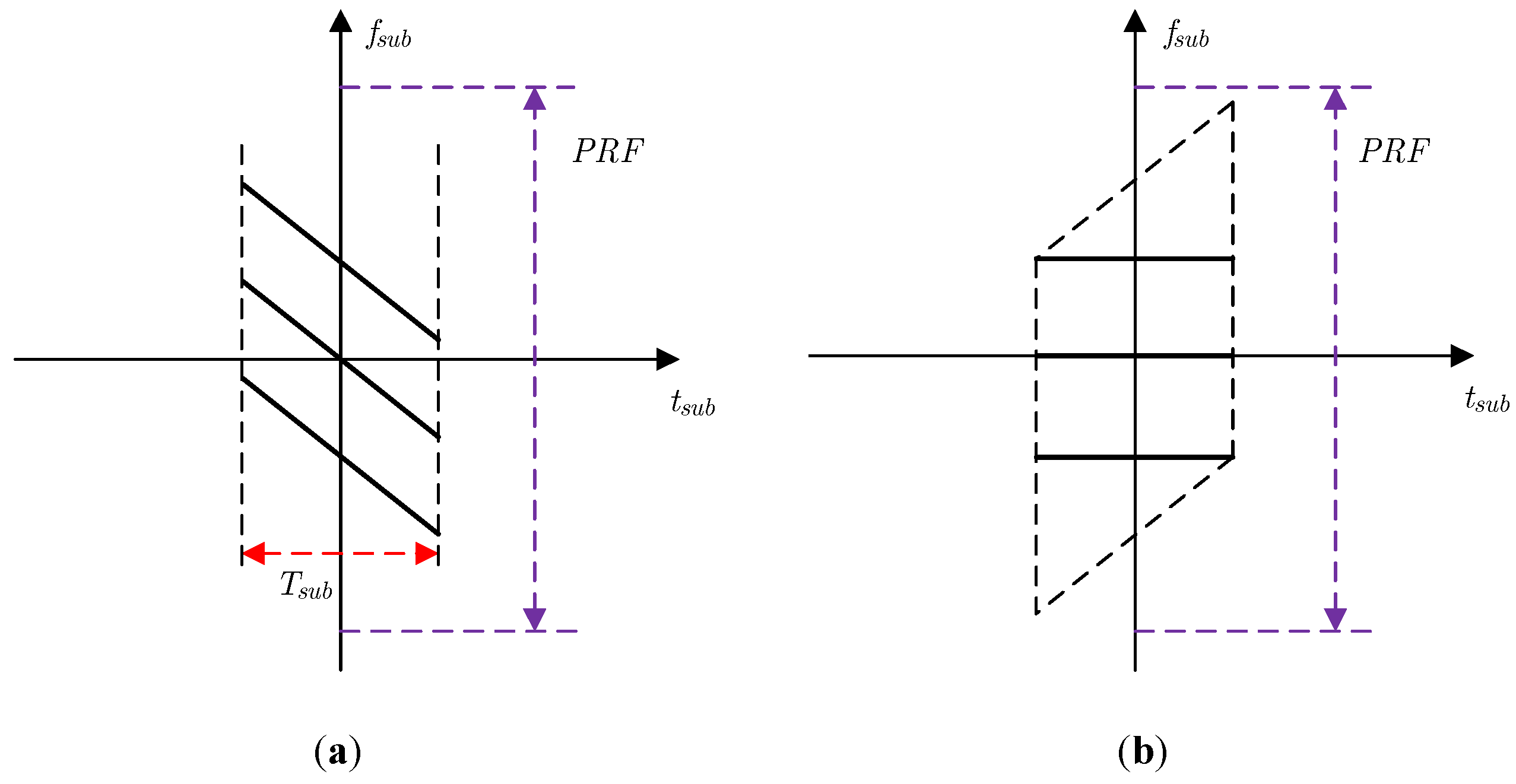
3.2.2. Azimuth Dechirp
3.2.3. Sub-Aperture Complex-Value Image Stitching
4. Simulation and Real Data Results
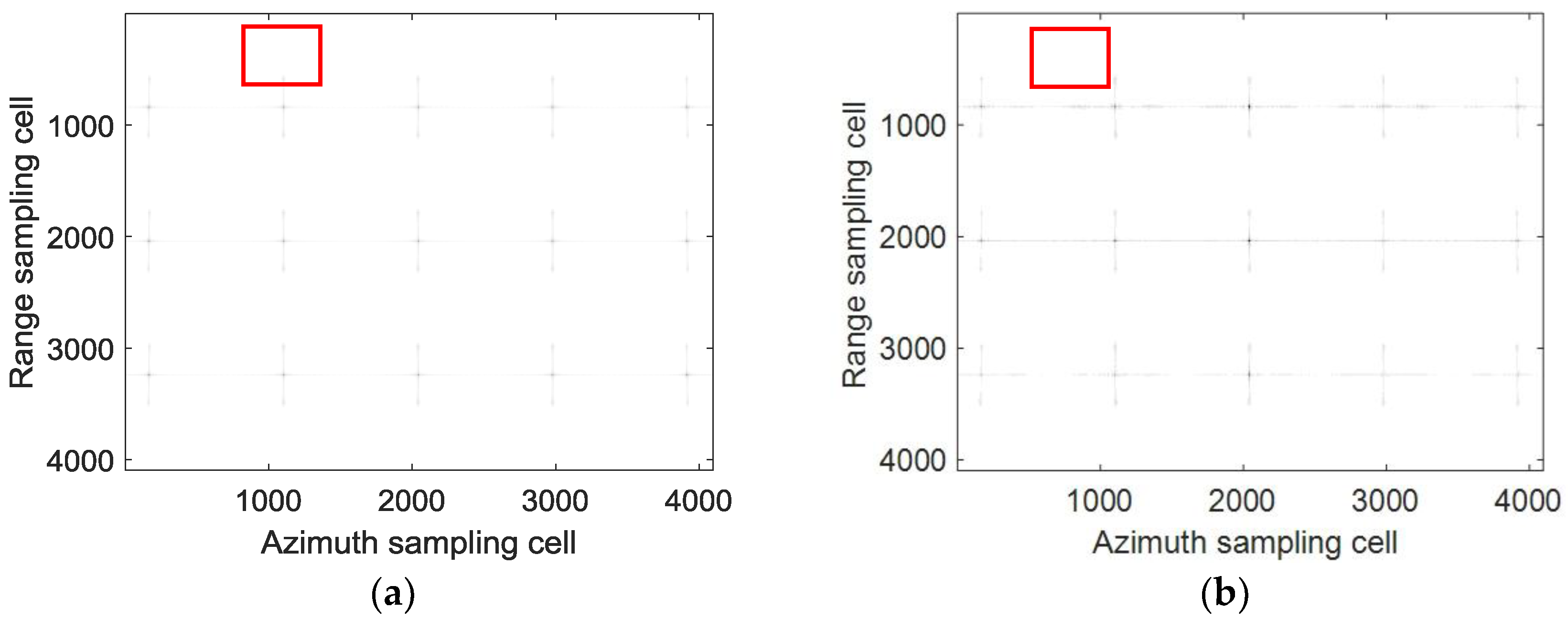
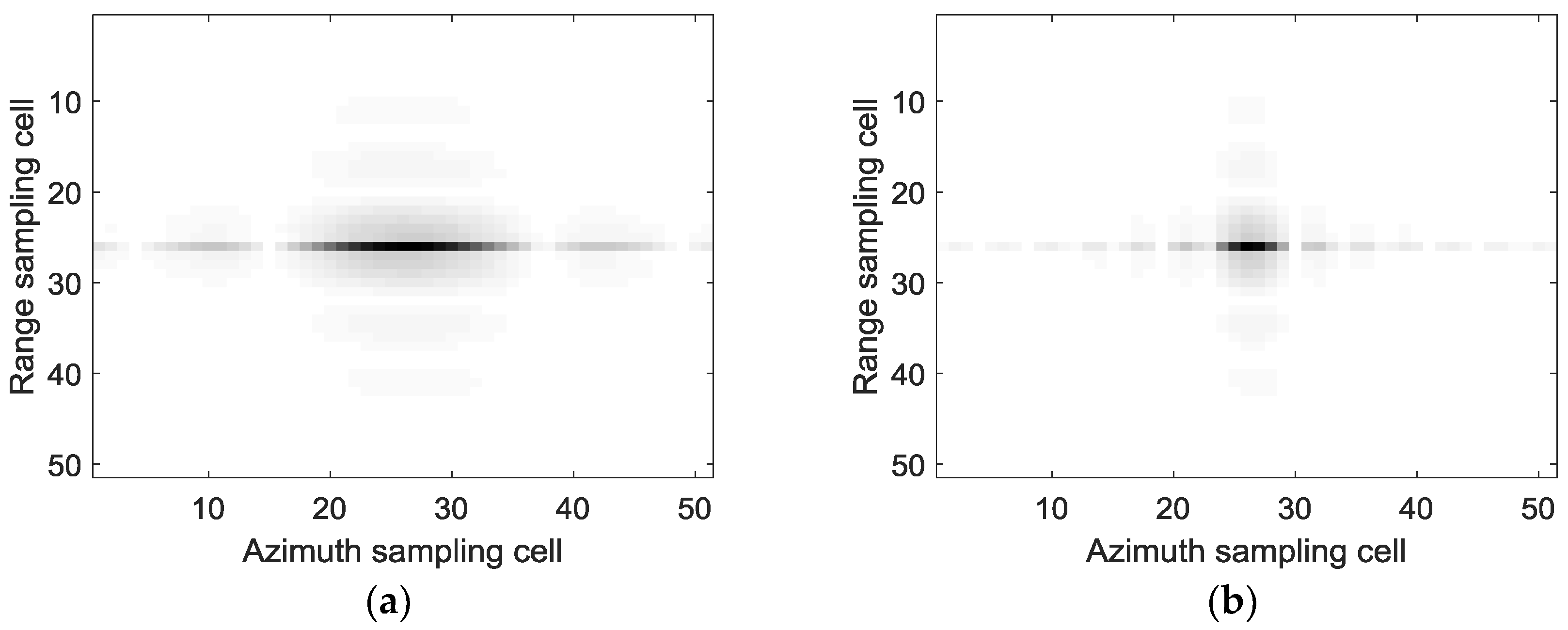
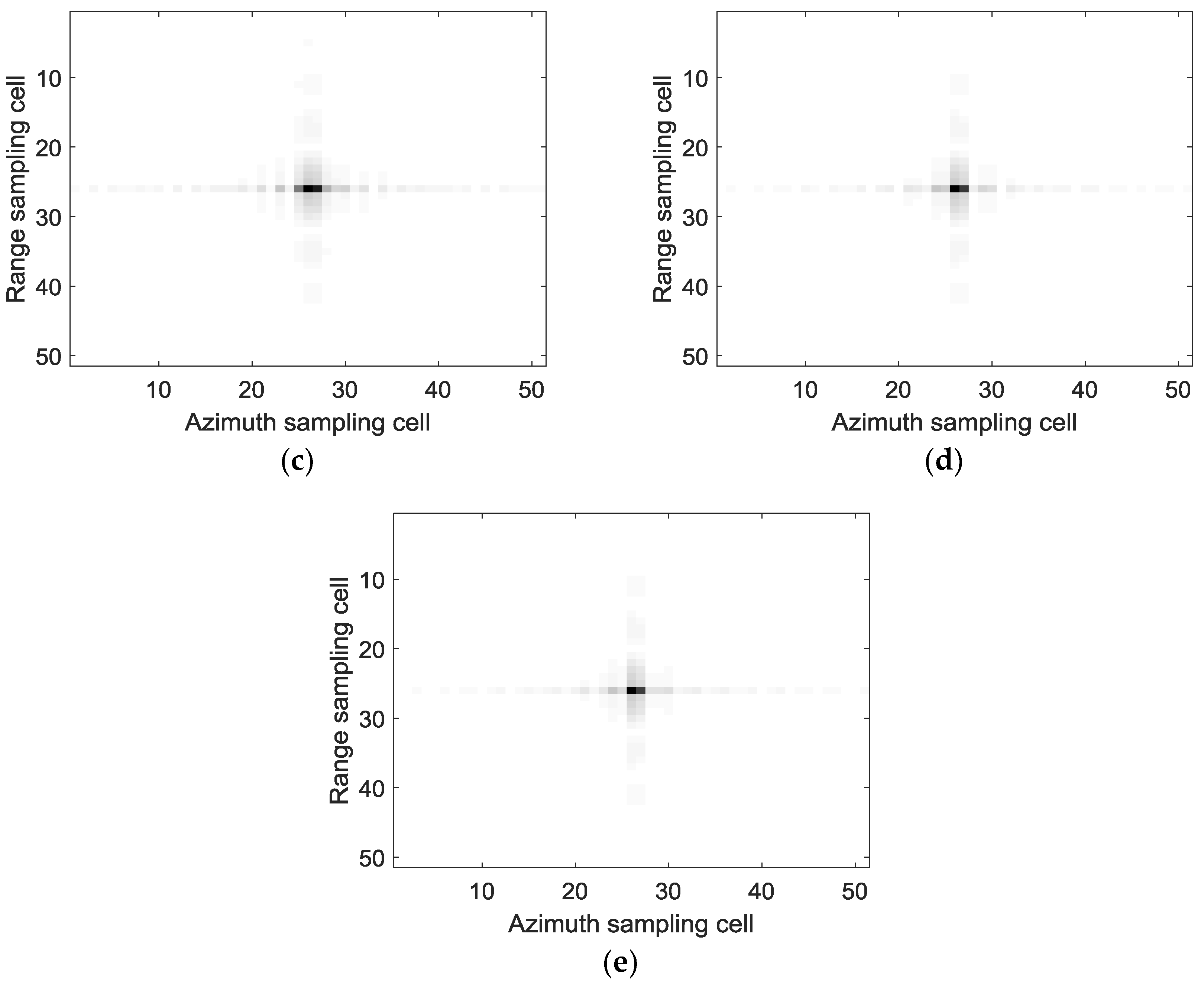
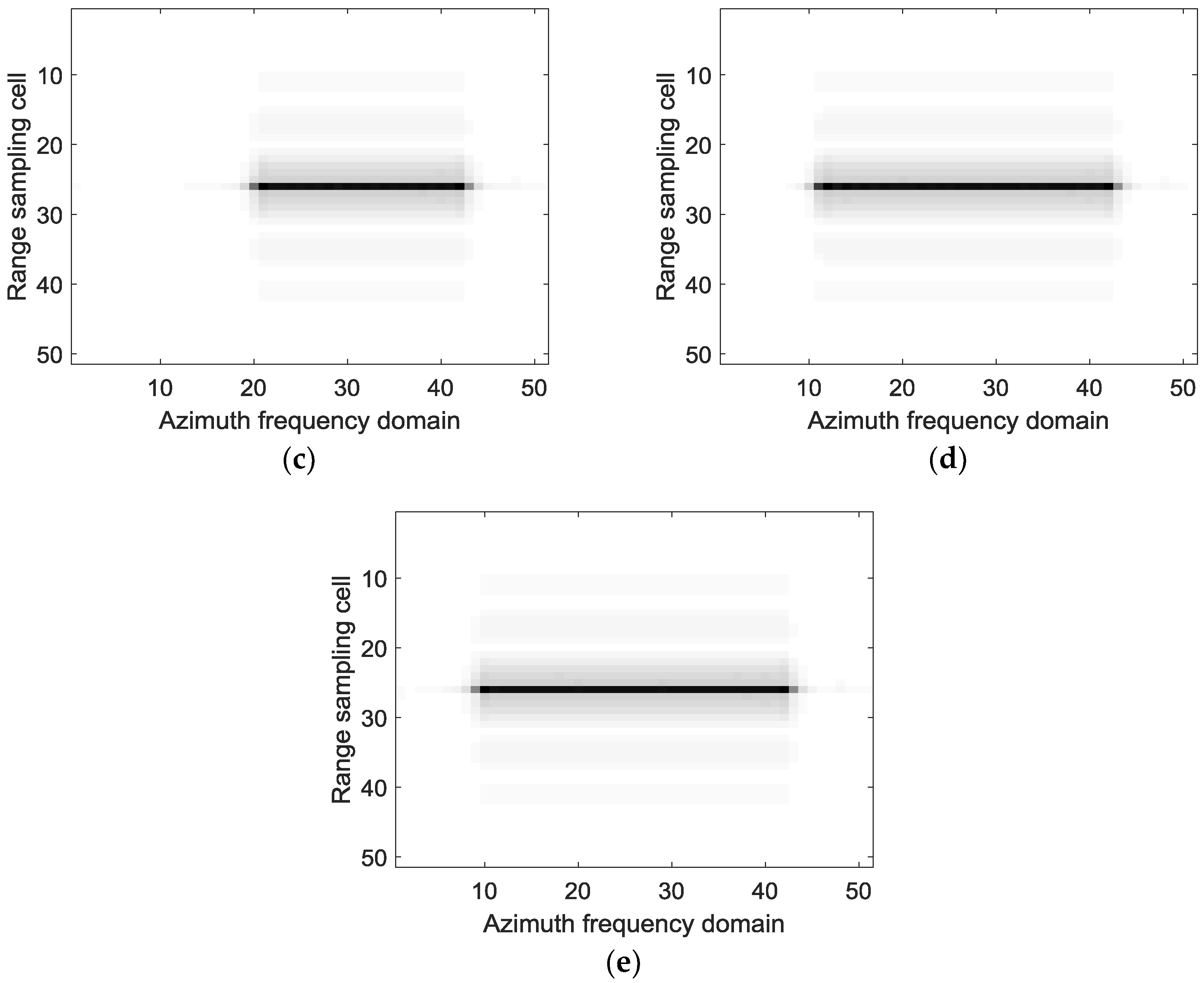
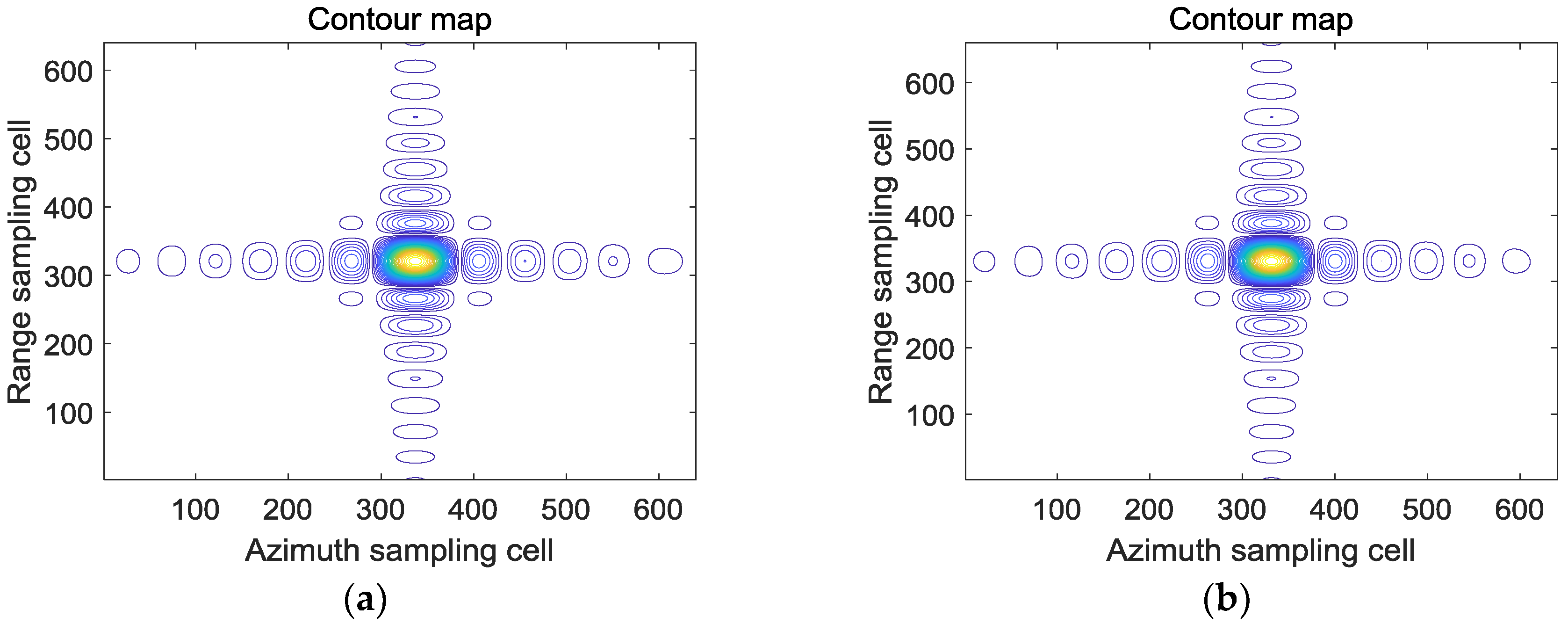
4.1. Point Targets Simulation
4.2. GF3-SAR Data Results
4.3. Computational Load Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Sigurd, H.; Felipe, Q.; Michelangelo, V.; Marwan, Y.; Gerhard, K.; Alberto, M. Tandem-L: A Technical Perspective on Future Spaceborne SAR Sensors for Earth Observation. IEEE Trans. Geosci. Remote Sens. 2018, 50, 4792–4807. [Google Scholar]
- Ren, Y.; Li, X.; Gao, G.; Thomas, E. Derivation of Sea Surface Tidal Current From Spaceborne SAR Constellation Data. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3236–3247. [Google Scholar] [CrossRef]
- Felipe, Q.; Marwan, Y.; Gerhard, K.; Alberto, M. An Analytical Error Model for Spaceborne SAR Multichannel Azimuth Reconstruction. IEEE Geosci. Remote Sens. Lett. 2018, 15, 853–857. [Google Scholar]
- Ni, C.; Tan, H.; Liu, Q. VPX based spaceborne SAR real-time echo simulation. In Proceedings of the IEEE 6th International Symposium on MAPE, Shanghai, China, 28–30 October 2015; pp. 759–763. [Google Scholar]
- Moreira, A.; Scheiber, R.; Mittermayer, J.; Spielbauer, R. Real-time implementation of the extended chirp scaling algorithm for air- and spaceborne SAR-processing. In Proceedings of the International Geoscience and Remote Sensing Symposium (IGARSS), Firenze, Italy, 10–14 July 1995; pp. 2286–2288. [Google Scholar]
- Gu, C.; Chang, W.; Li, X.; Jia, G.; Luan, X. A New Distortion Correction Method for FMCW SAR Real-Time Imaging. IEEE Geosci. Remote Sens. Lett. 2017, 14, 429–433. [Google Scholar] [CrossRef]
- Smith, A. A new approach to range-Doppler SAR processing. Int. J. Remote Sens. 1991, 12, 235–251. [Google Scholar] [CrossRef]
- Keith, R.; Runge, H.; Bamler, R.; Cumming, G.; Wong, H. Precision SAR processing using chirp scaling. IEEE Trans. Geosci. Remote Sens. 1994, 32, 786–799. [Google Scholar]
- Cafforio, C.; Prati, C.; Rocca, F. SAR data focussing using seismic migration techniques. IEEE Trans. Aerosp. Electron. Syst. 1991, 27, 199–207. [Google Scholar] [CrossRef]
- Zhu, D.; Ye, S.; Zhu, Z. A polar format algorithm using chirp scaling for spotlight SAR image formation. IEEE Trans. Aerosp. Electron. Syst. 2008, 44, 1433–1448. [Google Scholar] [CrossRef]
- Sun, G.C.; Xing, M.; Xia, X.G.; Wu, Y.; Huang, P.; Wu, Y.; Bao, Z. Multichannel Full-Aperture Azimuth Processing for Beam Steering SAR. IEEE Trans. Geosci. Remote Sens. 2013, 51, 4761–4778. [Google Scholar] [CrossRef]
- Sun, G.C.; Xing, M.; Xia, X.G.; Yang, J.; Wu, Y.; Bao, Z. A Unified Focusing Algorithm for Several Modes of SAR Based on FrFT. IEEE Trans. Geosci. Remote Sens. 2013, 51, 3139–3155. [Google Scholar] [CrossRef]
- Anghel, A.; Vasile, G.; Ioana, C.; Cacoveanu, R.; Ciochina, S. Micro-Doppler Reconstruction in Spaceborne SAR Images Using Azimuth Time–Frequency Tracking of the Phase History. IEEE Trans. Geosci. Remote Sens. 2016, 13, 604–608. [Google Scholar] [CrossRef]
- Zuo, S.S.; Xing, M.; Xia, X.G.; Sun, G.C. Improved Signal Reconstruction Algorithm for Multichannel SAR Based on the Doppler Spectrum Estimation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 1425–1442. [Google Scholar] [CrossRef]
- Sun, G.C.; Xing, M.; Wang, Y.; Wu, Y.; Wu, Y.; Bao, Z. Sliding Spotlight and TOPS SAR Data Processing Without Subaperture. IEEE Geosci. Remote Sens. Lett. 2011, 8, 1036–1040. [Google Scholar] [CrossRef]
- Moreira, A. Real-time synthetic aperture radar (SAR) processing with a new subaperture approach. IEEE Trans. Geosci. Remote Sens. 1992, 30, 714–722. [Google Scholar] [CrossRef]
- Wang, X.; Wang, R.; Deng, Y.; Wang, W.; Li, N. SAR Signal Recovery and Reconstruction in Staggered Mode with Low Oversampling Factors. IEEE Geosci. Remote Sens. Lett. 2018, 15, 704–708. [Google Scholar] [CrossRef]
- Yuan, Y.; Chen, S.; Zhang, S.; Zhao, H. A chirp scaling algorithm for forward-looking linear-array SAR with constant acceleration. IEEE Geosci. Remote Sens. Lett. 2018, 15, 88–91. [Google Scholar] [CrossRef]
- Bie, B.; Xing, M.; Xia, X.; Sun, G. A frequency domain backprojection algorithm based on local cartesian coordinate and subregion range migration correction for high-squint SAR mounted on maneuvering platforms. IEEE Trans. Geosci. Remote Sens. 2018, 99, 1–16. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Carrier frequency | 9.63 GHz |
| Bandwidth | 50 MHz |
| Sample frequency | 60 MHz |
| Velocity | 7391 m/s |
| PRF | 2738 Hz |
| Center line distance | 617 km |
| Parameter | Value |
|---|---|
| Bandwidth | 100 MHz |
| Sample frequency | 133 MHz |
| Wavelength | 0.055 m |
| Velocity | 7132 m/s |
| PRF | 2580 Hz |
| Center line distance | 842 km |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, G.-C.; Liu, Y.; Xing, M.; Wang, S.; Guo, L.; Yang, J. A Real-Time Imaging Algorithm Based on Sub-Aperture CS-Dechirp for GF3-SAR Data. Sensors 2018, 18, 2562. https://doi.org/10.3390/s18082562
Sun G-C, Liu Y, Xing M, Wang S, Guo L, Yang J. A Real-Time Imaging Algorithm Based on Sub-Aperture CS-Dechirp for GF3-SAR Data. Sensors. 2018; 18(8):2562. https://doi.org/10.3390/s18082562
Chicago/Turabian StyleSun, Guang-Cai, Yanbin Liu, Mengdao Xing, Shiyu Wang, Liang Guo, and Jun Yang. 2018. "A Real-Time Imaging Algorithm Based on Sub-Aperture CS-Dechirp for GF3-SAR Data" Sensors 18, no. 8: 2562. https://doi.org/10.3390/s18082562
APA StyleSun, G. -C., Liu, Y., Xing, M., Wang, S., Guo, L., & Yang, J. (2018). A Real-Time Imaging Algorithm Based on Sub-Aperture CS-Dechirp for GF3-SAR Data. Sensors, 18(8), 2562. https://doi.org/10.3390/s18082562