PHAROS—PHysical Assistant RObot System





Abstract
:1. Introduction
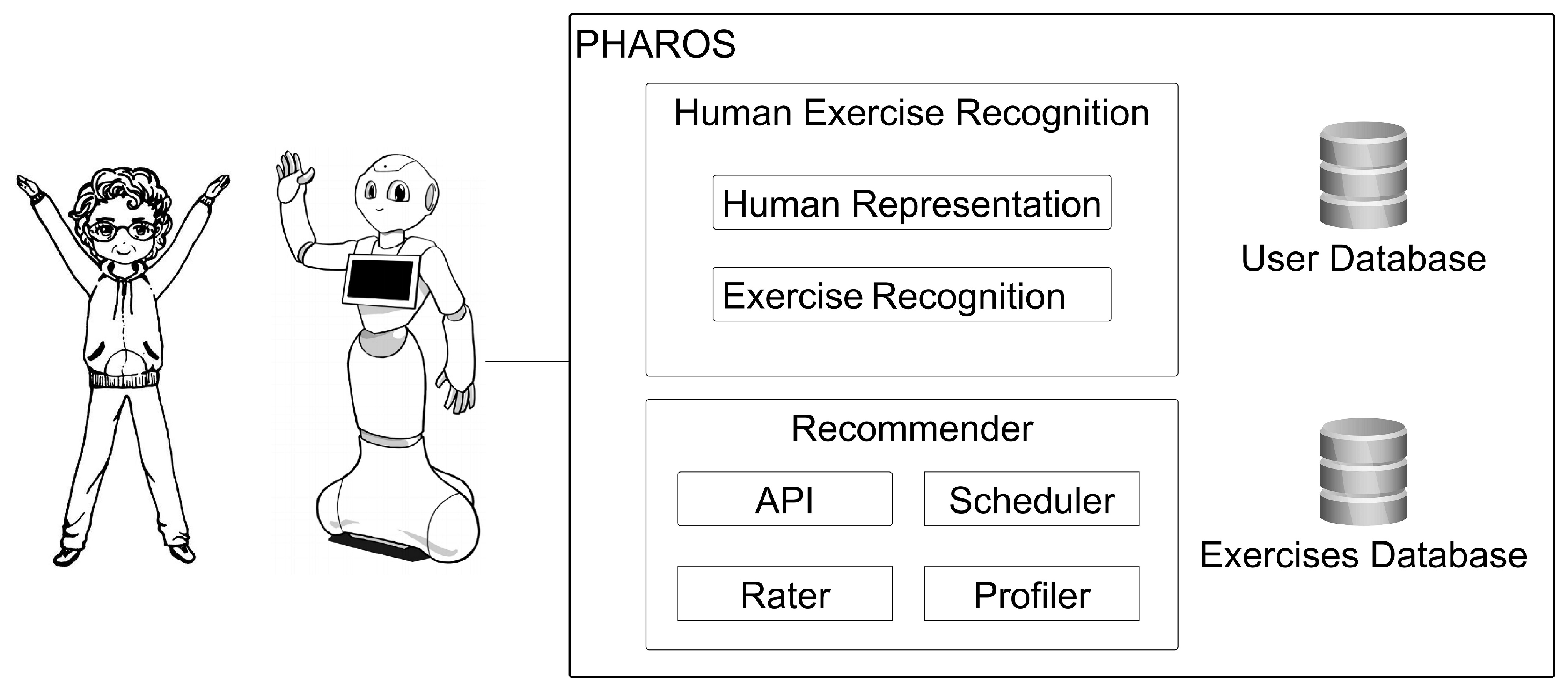
2. PHAROS Architecture
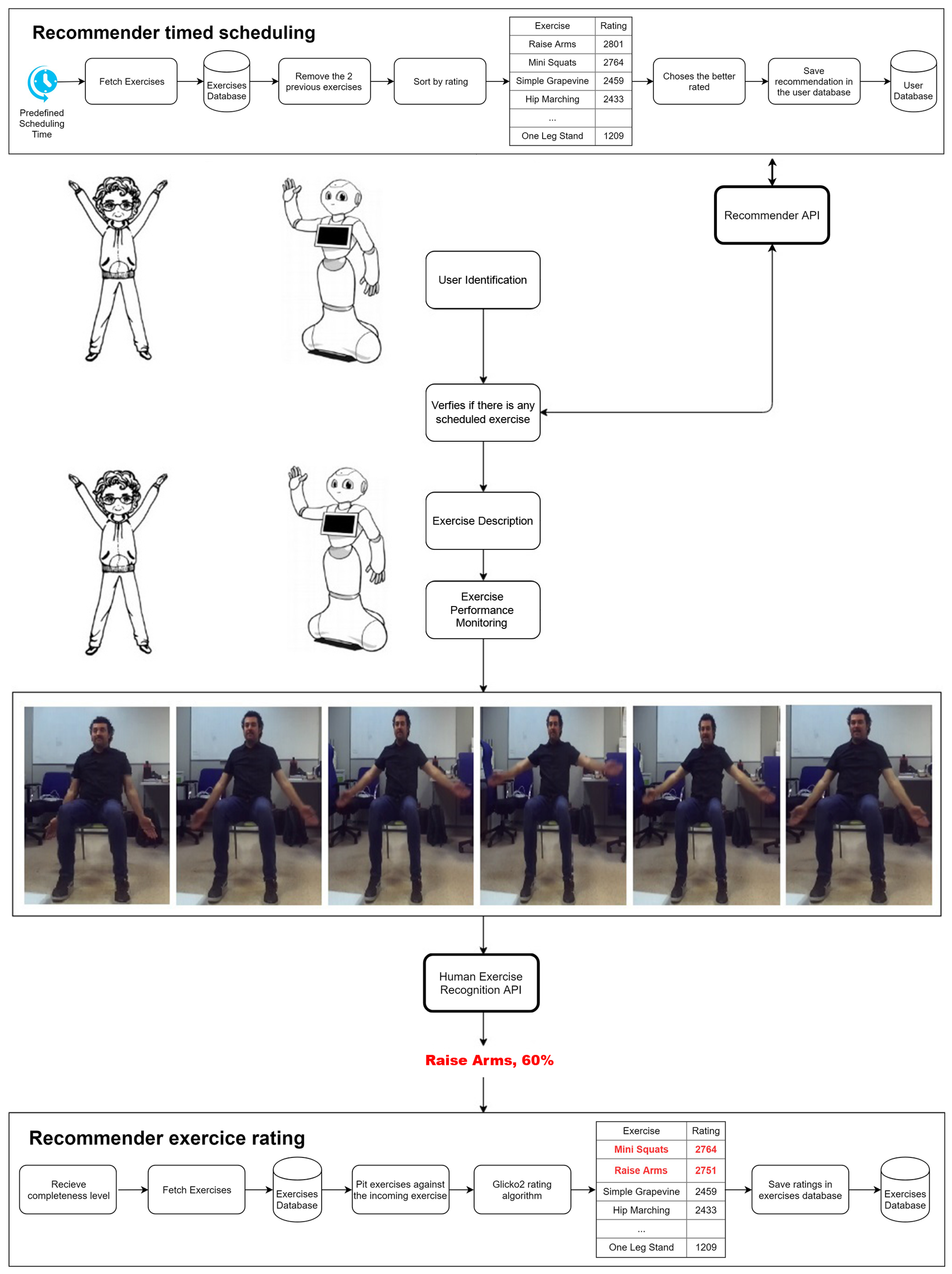
3. Recommender (Rc)
3.1. User Registration
3.2. Exercise Recommendation
3.3. Exercise Information Reception
3.4. Exercises Rating
3.4.1. Rating Algorithm
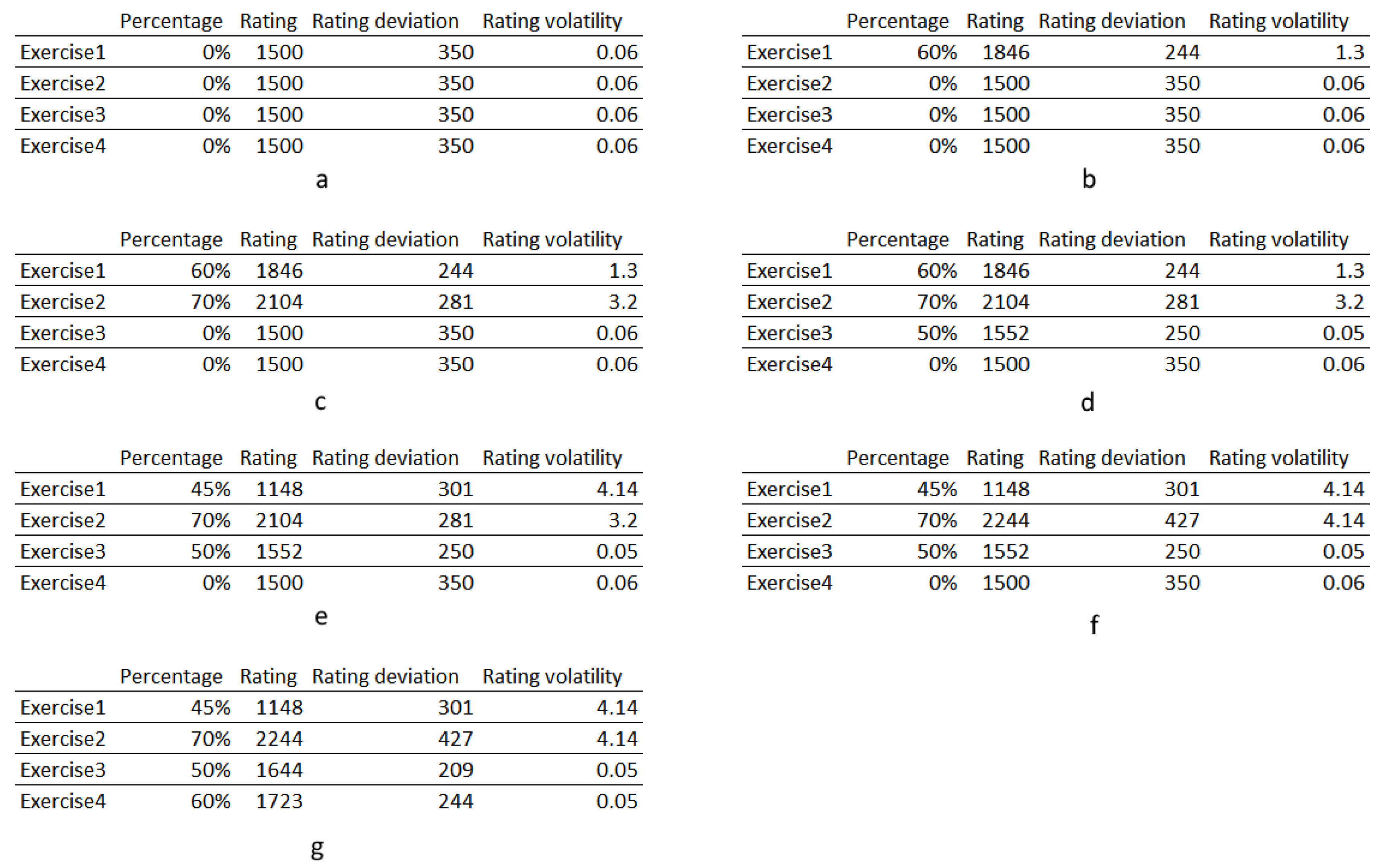
- For each user, the exercises he/she can perform are selected. This filter is supervised by formal caretakers that specify what exercises each user is able to perform without being a risk for his/her health. The filter is set initially when a user is introduced in the PHAROS system, and it is configurable at any time (see Figure 2a).
- Each exercise possesses a rating or is given one (as shown in Figure 2a). Due to being personalised for each user, each exercise has a specific rating for each user, e.g., Exercise1 can have a rating of 1865 points for User1 and 1470 for User2.
- In case of any exercise is unrated (first Rc execution or a new exercise introduced by the caregiver in the user profile), it is given the base rating of 1500 points and a small deviation and volatility values (Figure 2a). This means that most of the time, the Rc will not recommend this exercise to the user unless the rest of the exercises have lower classification, which is highly improbable.
- The two previously recommended exercises are removed from the recommendation pool (Figure 2b and rest). This counteracts the bias towards high performed exercises. As stated before, winning exercises (the ones that are chosen over others) tend to continue to be chosen as winners (apart from changing health conditions of the users) due to their stable increasing rating. Thus, to introduce variance, the algorithm removes the previously performed exercises, avoiding exercise repetition and the creation of a small group of activities that is highly rated over the others.
- The exercise with the highest rating is then selected and saved locally, available for the clients via the API. When the clients recall that information, it is replied with the complete information about the exercise, guaranteeing maximum compatibility with the clients.
- After performing the exercises, the Rc waits for the performance values (percentage of completeness). When these values are received, the Rc rates the exercises (explained in Section 3.4.1.1). This process is done in the following way (illustrated in Figure 2):
- The history about the proposed exercises is retrieved.
- The “loser” exercises (the ones that were not selected to be performed) are separated in three groups in relation to the percentage received. The exercises that have better performance are classified as over, the ones that have similar values are classified as same (with a fluctuation of over and under 2 percentage points), and the ones that have lower percentage values are classified as under.
- These events are then rated in relation to the received percentage (i.e., the exercise performed). Using a game-related language (Glicko2) the over exercises are evaluated as winners, the same exercises are evaluated as ties, and the under are evaluated as losers.
- The resulting value is saved as the new exercise rating of that specific user. This rating is used in the next exercise suggestion.
- The outcome of this process is a variation of the exercises rating. This asserts an evolutionary process that constantly evolves according to the user’s ability and health status.
- The Rc enters in a sleep state until the scheduler restarts it.
3.4.1.1. Rating Procedure
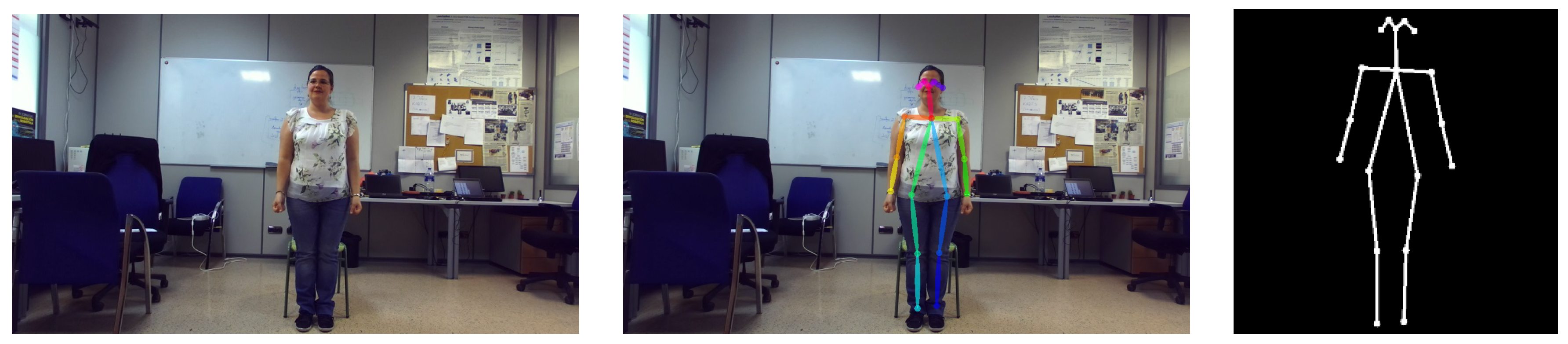
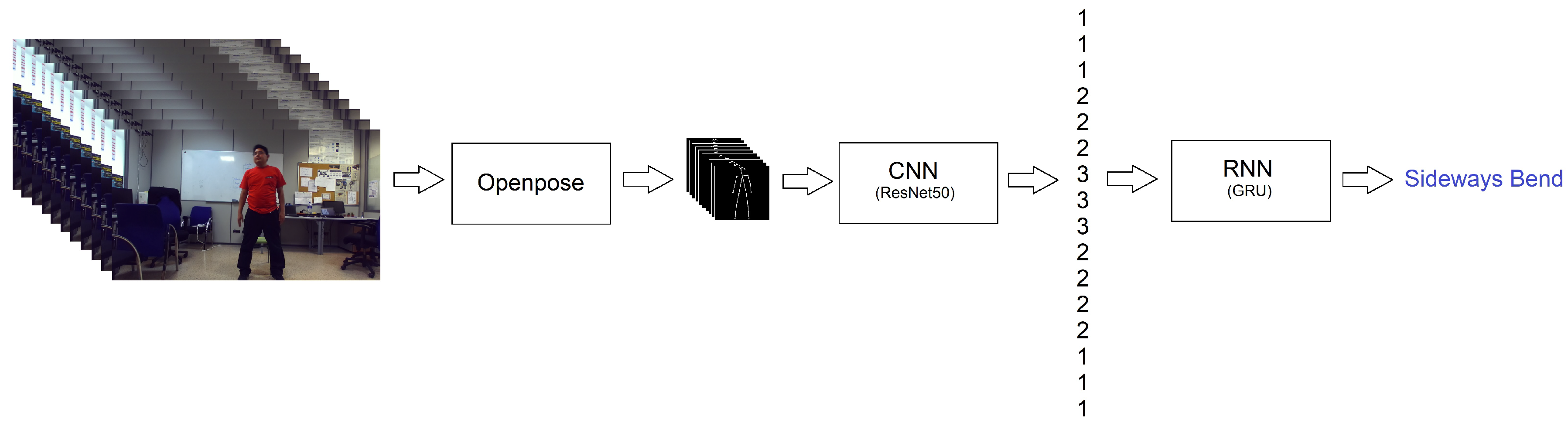
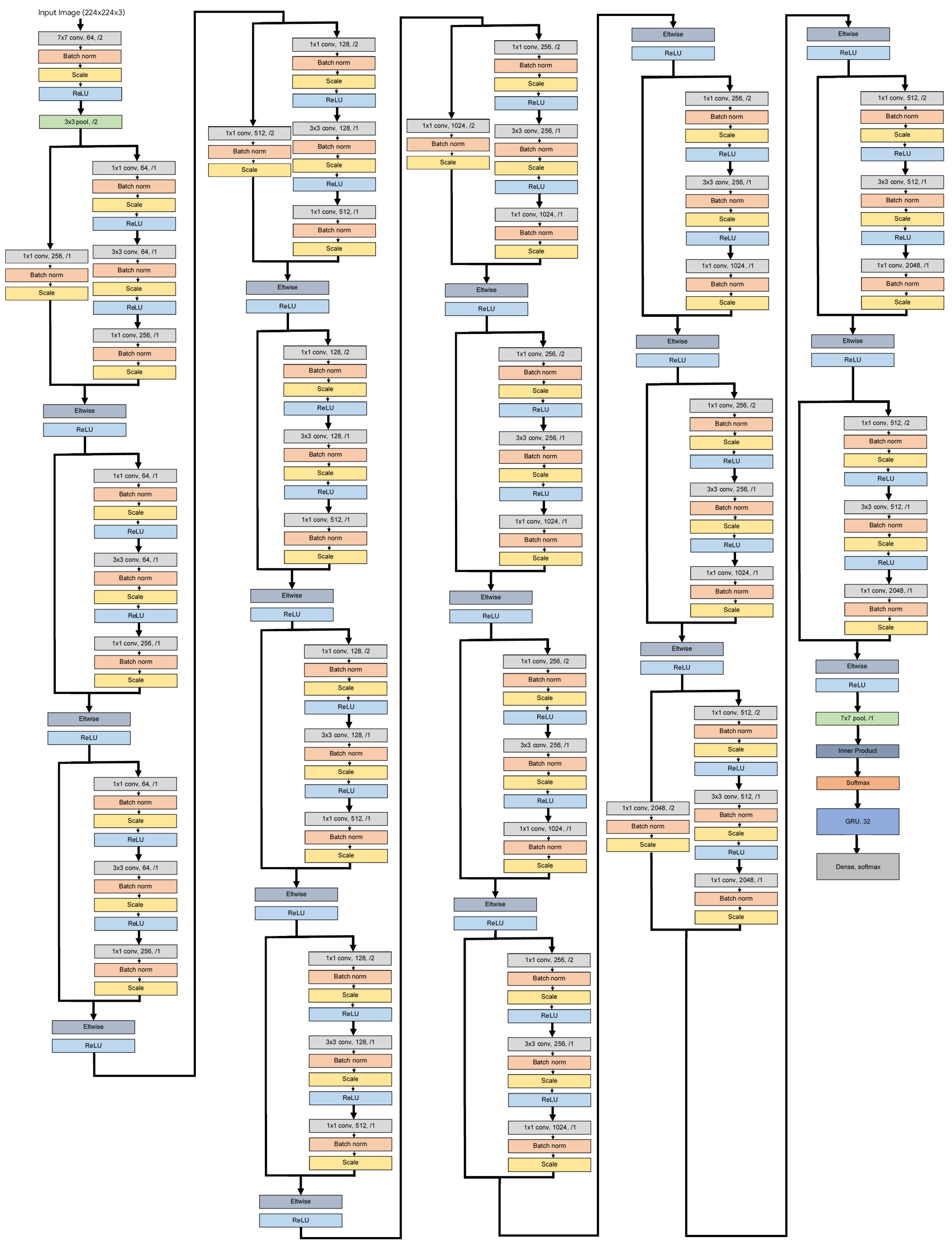
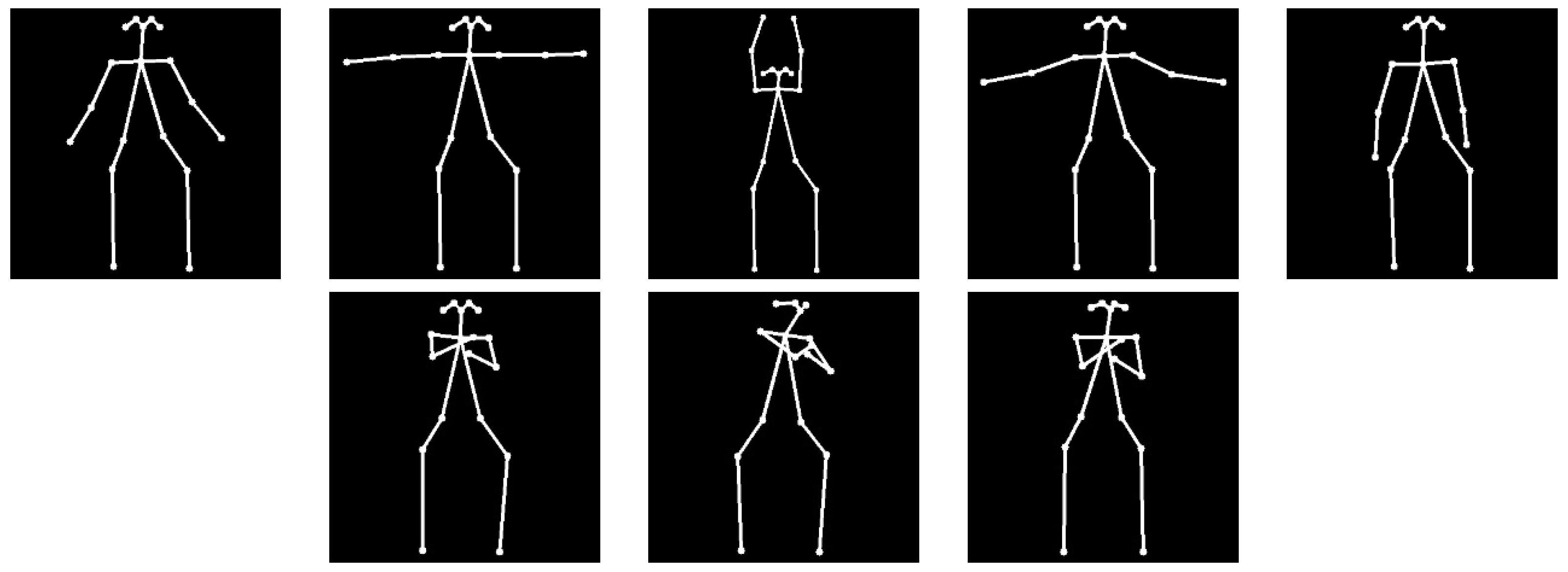
4. Human Exercise Recognition
5. Experimental Results
- Exercises distribution:Table 1 shows the distribution of the exercises in a natural order. The first iterations (from 1 to 30) show a high diversity of exercises, while from thereon some repetition in exercises is observable. The reason behind this is that in the first iterations the rating of the exercises variation is low, making any exercise eligible. After this initial period, the difference between ratings starts to be substantial, promoting the exercises that receive higher percentages.
- Health issues identified: Despite John’s leg issues, some leg exercises have been recommended. An interesting pattern occurs with the Step Up exercise, the percentages are: 77.2%, 68.3%, 70.1%, 47.1%, 78.6%, 26.1%, 10%. This reveals that there is a clear decrease in the ability to perform this exercise, what may reveal a health problem. Another pattern is showed by the Sideways Bend, which has continuously low percentage values. This can be the outcome of one of two problems: physical problems affecting the exercise performance or poorly performing the exercise. It is clear that this is a problem unable to overcome by PHAROS, thus the assistance of a caregiver is required.
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- United Nations. 2017 Revision of World Population Prospects. 2017. Available online: https://esa.un.org/unpd/wpp/ (accessed on 28 June 2018).
- National Institute on Aging. Why Population Aging Matters: A Global Perspective. 2007. Available online: https://www.nia.nih.gov/research/publication/why-population-aging-matters-global-perspective (accessed on 28 June 2018).
- Mattimore, T.J.; Wenger, N.S.; Desbiens, N.A.; Teno, J.M.; Hamel, M.B.; Liu, H.; Califf, R.; Connors, A.F., Jr.; Lynn, L.; Oye, R.K. Surrogate and physician understanding of patients’ preferences for living permanently in a nursing home. J. Am. Geriatr. Soc. 1997, 45, 818–824. [Google Scholar] [CrossRef] [PubMed]
- InTouch Health. 2017. Available online: https://www.intouchhealth.com (accessed on 28 June 2018).
- Al Sumaiti, A.S.; Ahmed, M.H.; Salama, M.M.A. Smart Home Activities: A Literature Review. Electr. Power Compon. Syst. 2014, 42, 294–305. [Google Scholar] [CrossRef] [Green Version]
- Agoulmine, N.; Deen, M.; Lee, J.S.; Meyyappan, M. U-Health Smart Home. IEEE Nanotechnol. Mag. 2011, 5, 6–11. [Google Scholar] [CrossRef]
- Bonner, S. Assisted Interactive Dwelling House. In Proceedings of the 3rd TIDE Congress, Helsinki, Finland, 23–25 June 1998. [Google Scholar]
- Pławiak, P. Novel genetic ensembles of classifiers applied to myocardium dysfunction recognition based on ECG signals. Swarm Evol. Comput. 2018, 39, 192–208. [Google Scholar] [CrossRef]
- Pławiak, P. Novel methodology of cardiac health recognition based on ECG signals and evolutionary-neural system. Expert Syst. Appl. 2018, 92, 334–349. [Google Scholar] [CrossRef]
- Pławiak, P.; Sośnicki, T.; Niedźwiecki, M.; Tabor, Z.; Rzecki, K. Hand Body Language Gesture Recognition Based on Signals From Specialized Glove and Machine Learning Algorithms. IEEE Trans. Ind. Inf. 2016, 12, 1104–1113. [Google Scholar] [CrossRef]
- Costa, A.; Julián, V.; Novais, P. Advances and trends for the development of ambient-assisted living platforms. Expert Syst. 2016, 34, e12163. [Google Scholar] [CrossRef]
- Ghiani, G.; Manca, M.; Paternò, F.; Santoro, C. End-user personalization of context-dependent applications in AAL scenarios. In Proceedings of the 18th MobileHCI’16 International Conference on Human-Computer Interaction with Mobile Devices and Services, Florence, Italy, 6–9 September 2016. [Google Scholar] [CrossRef]
- Costa, A.; Martinez-Martin, E.; del Pobil, A.P.; Simoes, R.; Novais, P. Find It—An Assistant Home Agent. In Trends in Practical Applications of Agents and Multiagent Systems; Springer International Publishing: Basel, Switzerland, 2013; pp. 121–128. [Google Scholar] [CrossRef] [Green Version]
- Lee, Y.; Kim, J.; Han, E.; Chae, S.; Ryu, M.; Ahn, K.; Park, E. Changes in physical activity and cognitive decline in older adults living in the community. J. Am. Aging Assoc. 2015, 37, 20. [Google Scholar] [CrossRef] [PubMed]
- Bherer, L.; Erickson, K.; Liu-Ambrose, T. A Review of the Effects of Physical Activity and Exercise on Cognitive and Brain Functions in Older Adults. J. Aging Res. 2013, 2013, 657508. [Google Scholar] [CrossRef] [PubMed]
- Bleser, G.; Steffen, D.; Weber, M.; Hendeby, G.; Stricker, D.; Fradet, L.; Marin, F.; Ville, N.; Carré, F. A personalized exercise trainer for the elderly. J. Ambient Intell. Smart Environ. 2013, 5, 547–562. [Google Scholar]
- Matsusaka, Y.; Fujii, H.; Okano, T.; Hara, I. Health exercise demonstration robot TAIZO and effects of using voice command in robot-human collaborative demonstration. In Proceedings of the 18th IEEE International Symposium on Robot and Human Interactive Communication, Toyama, Japan, 27 September–2 October 2009; pp. 472–477. [Google Scholar]
- Gadde, P.; Kharrazi, H.; MacDorman, K. Toward Monitoring and Increasing Exercise Adherence in Older Adults by Robotic Intervention: A Proof of Concept Study. J. Robot. 2011, 2011, 438514. [Google Scholar] [CrossRef]
- Görer, B.; Salah, A.; Akin, H. An autonomous robotic exercise tutor for elderly people. Auton. Robots 2017, 41, 657–678. [Google Scholar] [CrossRef]
- Aldebaran. NAO Robot. 2006. Available online: https://www.ald.softbankrobotics.com/en/robots/nao (accessed on 28 June 2018).
- Robotics, S. Pepper Robot. 2018. Available online: https://www.softbankrobotics.com/emea/en/robots/pepper (accessed on 28 June 2018).
- Bainbridge, W.A.; Hart, J.W.; Kim, E.S.; Scassellati, B. The Benefits of Interactions with Physically Present Robots over Video-Displayed Agents. Int. J. Soc. Robot. 2010, 3, 41–52. [Google Scholar] [CrossRef]
- Spark. Available online: http://sparkjava.com/ (accessed on 23 June 2018).
- Glickman, M.E. Example of the Glicko-2 System. Technical Report. Boston University, 2013. Available online: http://www.glicko.net/glicko/glicko2.pdf (accessed on 28 June 2018).
- Le, Q.V.; Zou, W.Y.; Yeung, S.Y.; Ng, A.Y. Learning hierarchical invariant spatio-temporal features for action recognition with independent subspace analysis. In Proceedings of the CVPR 2011, Providence, RI, USA, 20–25 June 2011. [Google Scholar] [CrossRef]
- Zhang, H.; Parker, L.E. 4-dimensional local spatio-temporal features for human activity recognition. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011. [Google Scholar] [CrossRef]
- Han, F.; Yang, X.; Reardon, C.; Zhang, Y.; Zhang, H. Simultaneous Feature and Body-Part Learning for real-time robot awareness of human behaviors. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017. [Google Scholar] [CrossRef]
- Vemulapalli, R.; Arrate, F.; Chellappa, R. Human Action Recognition by Representing 3D Skeletons as Points in a Lie Group. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014. [Google Scholar] [CrossRef]
- Cao, Z.; Simon, T.; Wei, S.E.; Sheikh, Y. Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 15 November 2017; pp. 7291–7299. [Google Scholar]
- Wei, S.E.; Ramakrishna, V.; Kanade, T.; Sheikh, Y. Convolutional pose machines. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 27–30 June 2016; pp. 4724–4732. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. arXiv, 2015; arXiv:cs.CV/1512.03385. [Google Scholar]
- Cho, K.; van Merrienboer, B.; Gülcehre, C.; Bougares, F.; Schwenk, H.; Bengio, Y. Learning Phrase Representations using RNN Encoder-Decoder for Statistical Machine Translation. arXiv, 2014; arXiv:cs.CL/1406.1078. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization. In Proceedings of the 3rd International Conference for Learning Representations, San Diego, CA, USA, 7–9 May 2015. [Google Scholar]
- NHS Choices—Exercises for Older People. 2018. Available online: https://www.nhs.uk/Tools/Documents/NHS_ExercisesForOlderPeople.pdf (accessed on 28 June 2018).
- Queirós, A.; Cerqueira, M.; Martins, A.I.; Silva, A.G.; Alvarelhão, J.; Teixeira, A.; Rocha, N.P. ICF Inspired Personas to Improve Development for Usability and Accessibility in Ambient Assisted Living. Procedia Comput. Sci. 2014, 27, 409–418. [Google Scholar] [CrossRef]
- Costa, A.; Teixeira, J.; Santos, N.; Vardasca, R.; Fernandes, J.; Machado, R.; Novais, P.; Simoes, R. Promoting Independent Living and Recreation in Life through Ambient Assisted Living Technology. In Ambient Assisted Living; Garcia, N.M., Rodrigues, J.J.P.C., Eds.; CRC Press: Boca Raton, FL, USA, 2015; pp. 509–535. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Iteration | Exercise | % Completed |
|---|---|---|
| 1 | Step Up | 77.22% |
| 2 | One Leg Stand | 36.56% |
| 3 | Heel To Toe Walk | 57.32% |
| 4 | Sideways Leg Lift | 51.08% |
| 5 | Simple Grapevine | 98.24% |
| 6 | Sideways Walking | 46.45% |
| 7 | Bicep Curls | 21.37% |
| 8 | Wall Press Up | 38.53% |
| 9 | Leg Extension | 69.89% |
| 10 | Calf Raises | 26.92% |
| 11 | Mini Squats | 70.21% |
| 12 | Sit To Stand | 24.29% |
| 13 | Calf Stretch | 50.37% |
| 14 | Sideways Bend | 18.32% |
| 15 | Neck Stretch | 73.81% |
| 16 | Neck Rotation | 15.98% |
| 17 | Arm Raises | 24.79% |
| 18 | Ankle Stretch | 42.33% |
| 19 | Hip Marching | 42.75% |
| 20 | Upper Body Twist | 82.31% |
| 21 | Chest Stretch | 92.06% |
| 22 | Neck Stretch | 28.13% |
| 23 | Upper Body Twist | 58.25% |
| 24 | Chest Stretch | 29.05% |
| 25 | Mini Squats | 34.71% |
| 26 | Leg Extension | 34.74% |
| 27 | Hip Marching | 94.54% |
| 28 | Calf Stretch | 57.48% |
| 29 | Ankle Stretch | 68.60% |
| 30 | Hip Marching | 38.53% |
| 31 | Calf Stretch | 4.36% |
| 32 | Ankle Stretch | 61.89% |
| 33 | Simple Grapevine | 31.51% |
| 34 | Heel To Toe Walk | 65.25% |
| 35 | Ankle Stretch | 62.11% |
| 36 | Sideways Leg Lift | 40.53% |
| 37 | Heel To Toe Walk | 97.96% |
| 38 | Ankle Stretch | 33.68% |
| 39 | Sideways Leg Lift | 49.15% |
| 40 | Heel To Toe Walk | 21.79% |
| 41 | Wall Press Up | 54.83% |
| 42 | Sideways Leg Lift | 26.76% |
| 43 | Step Up | 68.35% |
| 44 | Wall Press Up | 37.55% |
| 45 | Sideways Walking | 51.04% |
| 46 | Step Up | 70.19% |
| 47 | One Leg Stand | 57.18% |
| 48 | Sideways Walking | 48.41% |
| 49 | Step Up | 47.12% |
| 50 | One Leg Stand | 47.33% |
| 51 | Sideways Walking | 74.36% |
| 52 | Wall Press Up | 88.32% |
| 53 | One Leg Stand | 55.72% |
| 54 | Sideways Walking | 75.57% |
| 55 | Step Up | 78.66% |
| 56 | One Leg Stand | 93.83% |
| 57 | Calf Raises | 99.30% |
| 58 | Step Up | 26.12% |
| 59 | One Leg Stand | 75.13% |
| 60 | Calf Raises | 96.80% |
| 61 | Bicep Curls | 81.54% |
| 62 | One Leg Stand | 68.40% |
| 63 | Calf Raises | 21.20% |
| 64 | Bicep Curls | 48.17% |
| 65 | One Leg Stand | 88.30% |
| 66 | Arm Raises | 88.16% |
| 67 | Bicep Curls | 41.90% |
| 68 | Sit To Stand | 49.46% |
| 69 | Arm Raises | 29.93% |
| 70 | Bicep Curls | 66.74% |
| 71 | Sit To Stand | 63.15% |
| 72 | Sideways Bend | 9.02% |
| 73 | Bicep Curls | 11.09% |
| 74 | Sit To Stand | 41.86% |
| 75 | Neck Rotation | 59.92% |
| 76 | Simple Grapevine | 80.48% |
| 77 | Sit To Stand | 71.88% |
| 78 | Neck Rotation | 94.45% |
| 79 | Simple Grapevine | 77.62% |
| 80 | Ankle Stretch | 63.68% |
| 81 | Neck Rotation | 79.62% |
| 82 | Simple Grapevine | 53.08% |
| 83 | Ankle Stretch | 40.03% |
| 84 | Leg Extension | 54.56% |
| 85 | Simple Grapevine | 67.17% |
| 86 | Ankle Stretch | 44.95% |
| 87 | Hip Marching | 78.48% |
| 88 | Simple Grapevine | 16.73% |
| 89 | Ankle Stretch | 13.37% |
| 90 | Hip Marching | 88.51% |
| 91 | Sideways Leg Lift | 31.45% |
| 92 | Calf Stretch | 63.53% |
| 93 | Hip Marching | 38.82% |
| 94 | Wall Press Up | 74.01% |
| 95 | Calf Stretch | 70.55% |
| 96 | Mini Squats | 30.17% |
| 97 | Wall Press Up | 63.58% |
| 98 | Calf Stretch | 77.22% |
| 99 | Step Up | 10.01% |
| 100 | Wall Press Up | 62.58% |
| 165 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0 | 153 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 1 | 0 | 160 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0 | 0 | 0 | 266 | 0 | 0 | 0 | 0 | 0 |
| 0 | 0 | 0 | 0 | 131 | 0 | 0 | 0 | 0 |
| 0 | 0 | 0 | 0 | 0 | 55 | 0 | 0 | 0 |
| 0 | 0 | 0 | 0 | 0 | 0 | 187 | 0 | 0 |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 457 | 0 |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 339 |
| 109 | 0 | 5 | 0 | 0 | 0 | 0 | 0 | 0 |
| 25 | 3 | 11 | 0 | 0 | 0 | 0 | 31 | 0 |
| 45 | 0 | 50 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0 | 0 | 0 | 129 | 7 | 3 | 1 | 0 | 0 |
| 0 | 0 | 0 | 1 | 40 | 10 | 0 | 0 | 0 |
| 0 | 1 | 0 | 8 | 2 | 28 | 1 | 0 | 0 |
| 0 | 1 | 0 | 0 | 0 | 0 | 212 | 23 | 0 |
| 0 | 0 | 0 | 0 | 0 | 0 | 11 | 526 | 6 |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 10 | 342 |
| 10388 | 278 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 1913 | 8753 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0 | 0 | 10492 | 174 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0 | 0 | 1760 | 8906 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0 | 0 | 0 | 1 | 10665 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0 | 0 | 0 | 1 | 10 | 10649 | 6 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0 | 0 | 0 | 1 | 2 | 21 | 10642 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0 | 0 | 0 | 0 | 0 | 1 | 5 | 10660 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 10666 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 10666 | 0 | 0 | 0 | 0 | 0 |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 10665 | 0 | 0 | 0 | 0 |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 4 | 0 | 10637 | 25 | 0 | 0 |
| 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 28 | 10617 | 19 | 0 |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 7 | 30 | 10628 | 0 |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 10666 |
| 5193 | 140 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 905 | 4428 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0 | 0 | 5245 | 88 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0 | 0 | 891 | 4442 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0 | 0 | 0 | 0 | 5333 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0 | 0 | 0 | 0 | 10 | 5318 | 5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0 | 0 | 0 | 0 | 0 | 9 | 5324 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 5333 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 5333 | 0 | 0 | 0 | 0 | 0 | 0 |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 5333 | 0 | 0 | 0 | 0 | 0 |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 5332 | 0 | 0 | 0 | 0 |
| 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 5318 | 13 | 0 | 0 |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 12 | 5310 | 10 | 0 |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 2 | 26 | 5304 | 0 |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 5333 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Costa, A.; Martinez-Martin, E.; Cazorla, M.; Julian, V. PHAROS—PHysical Assistant RObot System. Sensors 2018, 18, 2633. https://doi.org/10.3390/s18082633
Costa A, Martinez-Martin E, Cazorla M, Julian V. PHAROS—PHysical Assistant RObot System. Sensors. 2018; 18(8):2633. https://doi.org/10.3390/s18082633
Chicago/Turabian StyleCosta, Angelo, Ester Martinez-Martin, Miguel Cazorla, and Vicente Julian. 2018. "PHAROS—PHysical Assistant RObot System" Sensors 18, no. 8: 2633. https://doi.org/10.3390/s18082633
APA StyleCosta, A., Martinez-Martin, E., Cazorla, M., & Julian, V. (2018). PHAROS—PHysical Assistant RObot System. Sensors, 18(8), 2633. https://doi.org/10.3390/s18082633