Motion Blurred Star Image Restoration Based on MEMS Gyroscope Aid and Blur Kernel Correction

Abstract
:1. Introduction
2. Problem Formulation
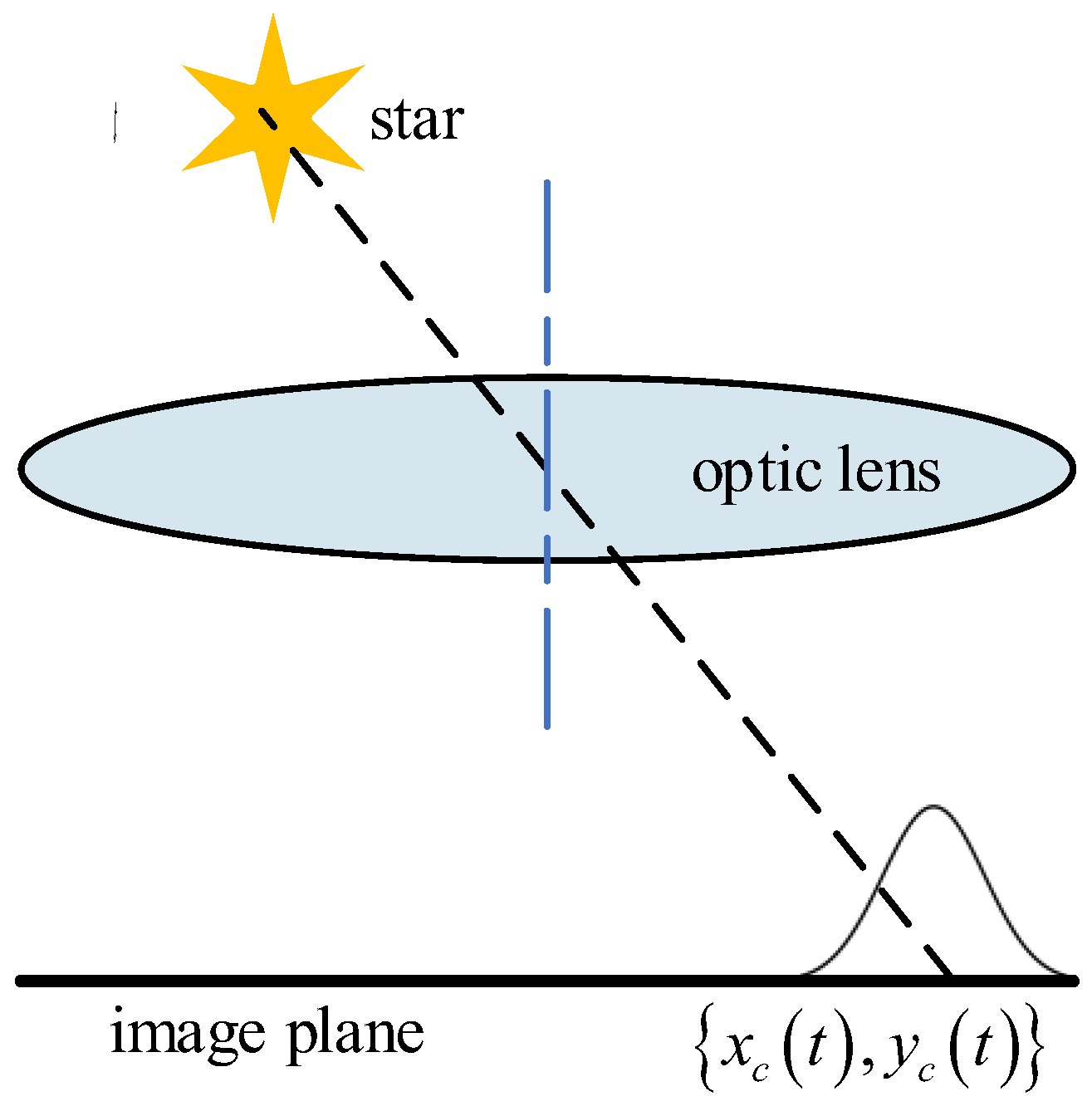
2.1. Problem Introduced by Motion Blur
2.2. Mathematical Model of Star Image Restoration
2.3. Mathematical Model of the Blur Kernel
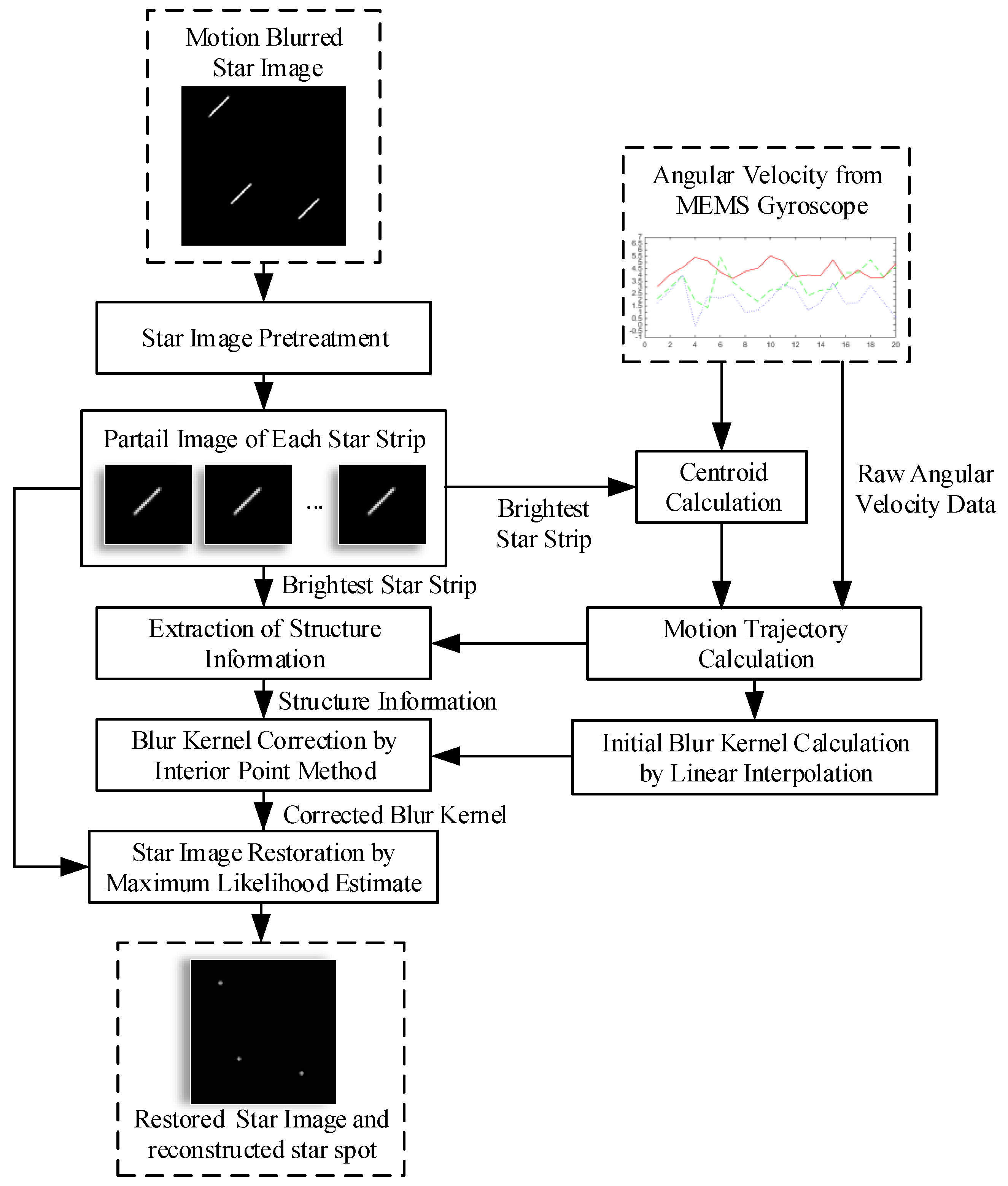
3. Overview of the Proposed Method
4. Blur Kernel Determination
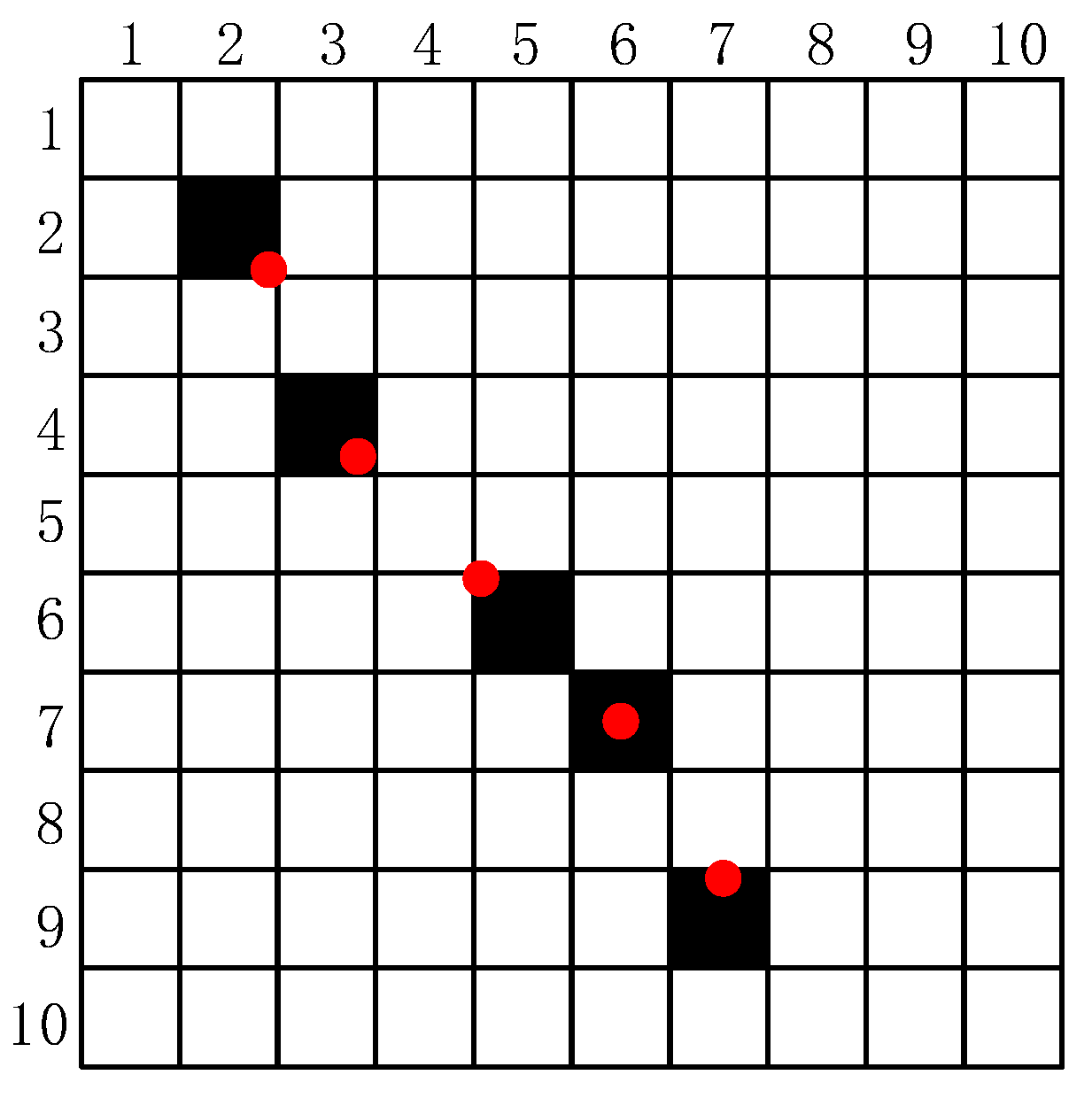
4.1. Initial Blur Kernel Calculation Aided by the Gyroscope
| Algorithm 1: linear interpolation between adjacent two trajectory points |
 |
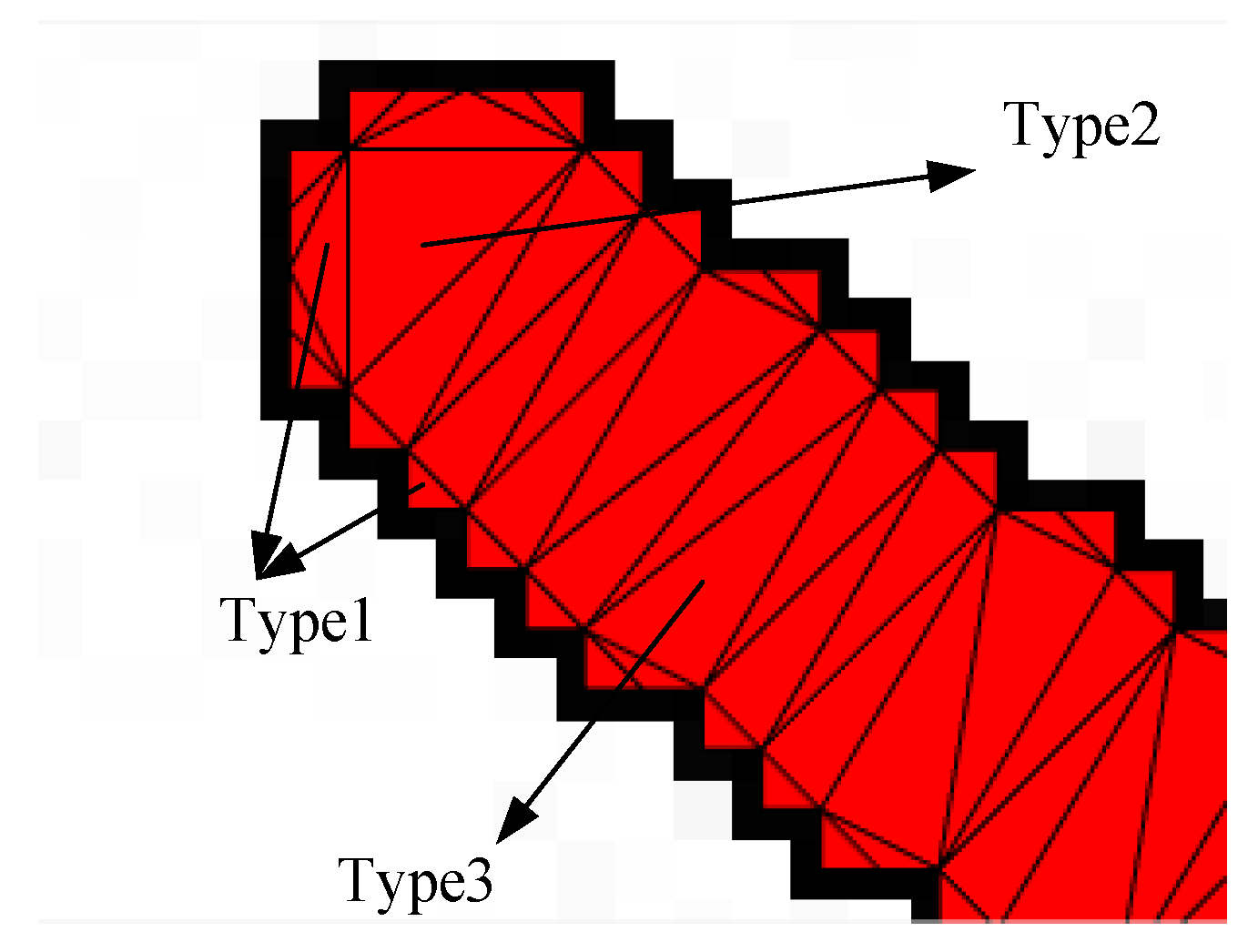
4.2. Structure Information Extraction of the Star Strip
4.3. Blur Kernel Correction with Structure Information of a Star Strip
| Algorithm 2: preconditioned conjugate gradient interior point algorithm |
 |
5. Star Image Reconstruction
| Algorithm 3: Image reconstruction by SGP |
 |
6. Experiment and Results
6.1. Simulated Experiment
6.1.1. Simulation Condition
6.1.2. Results
6.2. Star Extraction and Identification in Real Star Image
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
References
- Liebe, C.C. Accuracy performance of star trackers-A Tutorial. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 587–599. [Google Scholar] [CrossRef]
- Mayuresh, S.; Mathew, J.; Sreejith, A.G. A software package for evaluating the performance of a star sensor operation. Exp. Astron. 2017, 43, 99–117. [Google Scholar] [Green Version]
- Hou, B.; He, Z.; Li, D. Maximum correntropy unscented kalman filter for ballistic missile navigation system based on SINS/CNS deeply integrated mode. Sensors 2018, 18, 1724. [Google Scholar] [CrossRef] [PubMed]
- Wang, Q.Y.; Cui, X.F.; Li, Y.B. Performance enhancement of a USV INS/CNS/DVL integration navigation system based on an adaptive information sharing factor federated filter. Sensors 2017, 17, 239. [Google Scholar] [CrossRef] [PubMed]
- Ning, X.; Zhang, J.; Gui, M. A fast calibration method of the star sensor installation error based on observability analysis for the tightly coupled SINS/CNS integrated navigation system. IEEE Sens. J. 2018. [Google Scholar] [CrossRef]
- Muruganandan, V.A.; Park, J.H.; Lee, S. Star Selection algorithm for Arcsecond Pico Star Tracker. In Proceedings of the AIAA Aerospace Sciences Meeting, Kissimmee, FL, USA, 8–12 January 2018; p. 2199. [Google Scholar] [CrossRef]
- Saleem, R.; Lee, S. Reflective curved baffle for micro star trackers. In Proceedings of the 2017 IEEE International Symposium on. Robotics Intelligent Sensors, Ottawa, ON, Canada, 5–7 October 2017. [Google Scholar]
- Li, J.; Wei, X.; Zhang, G. An extended kalman filter-based attitude tracking algorithm for star sensors. Sensors 2017, 17, 1921. [Google Scholar] [CrossRef]
- Bezooijen, R.W.H.V. SIRTF autonomous star tracker. IR Space Telesc. Instrum. 2003, 4850, 108–121. [Google Scholar] [CrossRef]
- Bezooijen, R.W.H.V.; Kevin, A.A. Performance of the AST-201 star tracker for the microwave anisotropy probe. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Monterey, CA, USA, 5–8 August 2002; pp. 2002–4582. [Google Scholar]
- Gong, D.Z.; Wu, Y.P.; Lu, X. An attempt at improving dynamic performance of star tracker by motion compensation. Aerosp. Control Appl. 2009, 35, 19–23. [Google Scholar]
- Sun, T.; Xing, F.; You, Z. Motion-blurred star acquisition method of the star tracker under high dynamic conditions. Opt. Express 2013, 21, 20096–20110. [Google Scholar] [CrossRef] [PubMed]
- Sease, B.; Koglin, R.; Flewelling, B. Long-integration star tracker image processing for combined attitude-attitude rate estimation. In Proceedings of the Sensors. Systems. Space Applications VI, Baltimore, MD, USA, 29 April–3 May 2013; p. 87390. [Google Scholar] [CrossRef]
- Hou, W.; Liu, H.; Lei, Z. Smeared star spot location estimation using directional integral method. Appl. Opt. 2014, 53, 2073–2086. [Google Scholar] [CrossRef] [PubMed]
- Yu, W.; Jiang, J.; Zhang, G. Multiexposure imaging and parameter optimization for intensified star trackers. Appl. Opt. 2016, 55, 10187–10197. [Google Scholar] [CrossRef] [PubMed]
- Pasetti, A.; Habinc, S.; Creasey, R.C. Dynamical binning for high angular rate star tracking. Spacecr. Guid. Navig. Control Syst. 2000, 425, 255. [Google Scholar]
- Liao, Y.; Liu, E.; Zhong, J. Processing centroids of smearing star image of star sensor. Math. Prob. Eng. 2014, 1–8. [Google Scholar] [CrossRef]
- Fei, X.; Nan, C.; Zheng, Y. A novel approach based on MEMS-gyro’s data deep coupling for determining the centroid of star spot. Math. Prob. Eng. 2012, 1–20. [Google Scholar] [CrossRef]
- Jiang, J.; Huang, J.; Zhang, G. An accelerated motion blurred star restoration based on single image. IEEE Sens. J. 2017, 17, 1306–1315. [Google Scholar] [CrossRef]
- Zhang, H.; Niu, Y.; Lu, J. Accurate and autonomous star acquisition method for star sensor under complex conditions. Math. Prob. Eng. 2017, 1–12. [Google Scholar] [CrossRef]
- Sun, T.; Xing, F.; You, Z. Smearing model and restoration of star image under conditions of variable angular velocity and long exposure time. Opt. Express 2014, 22, 6009–6024. [Google Scholar] [CrossRef] [PubMed]
- Ma, L.; Bernelli-Zazzera, F.; Jiang, G. Region-confined restoration method for motion-blurred star image of the star sensor under dynamic conditions. Appl. Opt. 2016, 55, 4621–4631. [Google Scholar] [CrossRef] [PubMed]
- Wu, X.J.; Wang, X.L. Multiple blur of star image and the restoration under dynamic conditions. Acta Astronaut. 2011, 68, 1903–1913. [Google Scholar] [CrossRef]
- Zhang, C.; Zhao, J.; Yu, T. Fast restoration of star image under dynamic conditions via lp regularized intensity prior. Aerosp. Sci. Technol. 2017, 61, 29–34. [Google Scholar] [CrossRef]
- Quan, W.; Zhang, W.N. Restoration of motion-blurred star image based on Wiener filter. In Proceedings of the 2011 Fourth International Conference on Intelligent Computation Technology and Automation, Shenzhen, Guangdong, China, 28–29 May 2011; pp. 691–694. [Google Scholar] [CrossRef]
- Zhang, W.; Quan, W.; Guo, L. Blurred star image processing for star sensors under dynamic conditions. Sensors 2012, 12, 6712–6726. [Google Scholar] [CrossRef] [PubMed]
- Ma, X.; Xia, X.; Zhang, Z. Star image processing of SINS/CNS integrated navigation system based on 1DWF under high dynamic conditions. In Proceedings of the Position, Location and Navigation Symposium IEEE, Savannah, GA, USA, 11–14 April 2016; pp. 514–518. [Google Scholar] [CrossRef]
- Yan, J.; Jiang, J.; Zhang, G. Dynamic imaging model and parameter optimization for a star tracker. Opt. Express 2016, 24, 5961–5983. [Google Scholar] [CrossRef] [PubMed]
- Liebe, C.C.; Gromov, K.; Meller, D.M. Toward a stellar gyroscope for spacecraft attitude determination. J. Guid. Control Dyn. 2004, 27, 91–99. [Google Scholar] [CrossRef]
- Gonzalez, R.C.; Woods, R.E. Digital Image Processing, 2nd ed.; Prentice Hall: Englewood Cliffs, NJ, USA, 2002. [Google Scholar]
- Lee, D.T.; Schachter, B.J. Two algorithms for constructing a Delaunay triangulation. Int. J. Comput. Inf. Sci. 1980, 9, 219–242. [Google Scholar] [CrossRef]
- Brady, M. Smoothed local symmetries and their implementation. Int. J. Robot. Res. 1984, 3, 36–61. [Google Scholar] [CrossRef]
- Bonettini, S.; Zanella, R.; Zanni, L. A scaled gradient projection method for constrained image deblurring. Inverse Prob. 2008, 25, 015002. [Google Scholar] [CrossRef] [Green Version]
- Bonettini, S.; Prato, M. New convergence results for the scaled gradient projection method. Inverse Prob. 2015, 31, 095008. [Google Scholar] [CrossRef] [Green Version]
- Grippo, L.; Lampariello, F.; Lucidi, S. A nonmonotone line search technique for Newton’s method. SIAM J. Numer. Anal. 1986, 23, 707–716. [Google Scholar] [CrossRef]
- Frassoldati, G.; Zanni, L.; Zanghirati, G. New adaptive stepsize selections in gradient methods. J. Ind. Manag. Opt. 2008, 4, 299–312. [Google Scholar] [CrossRef]
- Barzilai, J.; Borwein, J.M. Two-point step size gradient methods. IMA J. Numer. Anal. 1988, 8, 141–148. [Google Scholar] [CrossRef]
- Boyd, S.; Vandenberghe, L. Convex Optimization; Cambridge University Press: New York, NY, USA, 2017. [Google Scholar]
- Kim, S.J.; Koh, K.; Lustig, M. An interior-point method for large-scale l1-regularized least squares. IEEE J. Sel. Top. Sign Process 2007, 1, 606–617. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Angular Velocity (°/s) | (Pixels) | (Pixels) | (Pixels) | ||
|---|---|---|---|---|---|
| 3 | 3 | 2 | (0.738, 0.880) | (0.189, 0.539) | (0.108, 0.151) |
| 4 | 4 | 0 | (0.622, 0.854) | (0.490, 0.203) | (0.157, 0.132) |
| 4 | 4 | 3 | (0.634, 0.759) | (0.138, 0.190) | (0.134, 0.124) |
| 5 | 5 | 0 | (0.895, 0.617) | (0.692, 0.037) | (0.145, 0.164) |
| 5 | 5 | 4 | (0.884, 0.819) | (0.389, 0.075) | (0.166, 0.152) |
| 7 | 6 | 5 | (1.091, 0.906) | (0.535, 0.413) | (0.294, 0.168) |
| Average error | (0.811, 0.806) | (0.406, 0.243) | (0.167, 0.149) | ||
| Angular Velocity (°/s) | avg_err_wnr (pixels) | avg_err_RL (pixels) | avg_err_lp (pixels) | avg_err_prop (pixels) | ||
|---|---|---|---|---|---|---|
| ωx | ωy | ωz | ||||
| 3 | 3 | 2 | (0.567, 0.289) | (0.395, 0.534) | (0.149, 0.211) | (0.108, 0.151) |
| 4 | 4 | 0 | (0.456, 0.163) | (0.582, 0.592) | (0.102, 0.180) | (0.157, 0.132) |
| 4 | 4 | 3 | (0.420, 0.124) | (0.219, 0.059) | (0.110, 0.368) | (0.134, 0.124) |
| 5 | 5 | 0 | (0.379, 0.309) | (0.132, 0.033) | (0.313, 0.419) | (0.145, 0.164) |
| 5 | 5 | 4 | (0.505, 0.215) | (0.467, 0.259) | (0.452, 0.232) | (0.166, 0.152) |
| 7 | 6 | 5 | (0.362, 0.816) | (0.495, 0.278) | (0.195, 0.203) | (0.294, 0.168) |
| Average error | (0.448, 0.319) | (0.382, 0.293) | (0.220, 0.269) | (0.167, 0.149) | ||
| Camera Parameters | Gyroscope Parameters | ||
|---|---|---|---|
| Focal Length | 16 mm | Range | ±250° |
| Image Size | 1024 pixels × 1024 pixels | Bias Drift | 0.15°/s |
| Angle of View | 22.7° (H) 17.1° (H) | Output Rate | 100 Hz |
| Pixel Size | 4.8 μm × 4.8 μm | Total Root Mean Square Noise | 0.05°/s |
| Exposure Time | 100 ms | ||
| No | Relative Position in Static Condition | Relative Position in Dynamic Condition | ||||||
|---|---|---|---|---|---|---|---|---|
| Truth | Before Restoration | After Restoration | ||||||
| x (pixels) | Δx (pixels) | y (pixels) | Δy (pixels) | Δxerr (pixels) | Δyerr (pixels) | Δxerr (pixels) | Δyerr (pixels) | |
| 1 | 171.688 | 0 | 600.079 | 0 | 0 | 0 | 0 | 0 |
| 2 | 215.723 | 44.035 | 773.642 | 173.563 | –3.260 | 0.096 | −0.236 | 0.081 |
| 3 | 237.442 | 65.754 | 78.207 | −521.872 | −6.461 | −0.326 | −0.474 | −0.236 |
| 4 | 425.399 | 253.711 | 263.513 | −336.566 | −0.660 | −0.147 | −0.664 | −0.249 |
| 5 | 436.188 | 264.500 | 507.378 | −92.701 | −5.028 | 0.013 | −0.527 | −0.153 |
| 6 | 459.601 | 287.913 | 527.165 | −72.914 | −3.812 | 0.184 | −0.575 | 0.005 |
| 7 | 462.934 | 291.246 | 730.523 | 130.444 | −4.397 | 0.511 | −0.867 | 0.248 |
| 8 | 587.362 | 415.674 | 600.653 | 0.574 | −6.140 | −0.210 | −0.315 | −0.341 |
| 9 | 604.388 | 432.700 | 743.470 | 143.391 | −0.317 | 0.181 | −0.099 | −0.094 |
| 10 | 611.949 | 440.261 | 673.777 | 73.698 | −0.557 | 0.304 | −0.232 | 0.088 |
| 11 | 628.240 | 456.552 | 607.475 | 7.396 | −0.854 | 0.085 | −0.185 | −0.025 |
| 12 | 790.469 | 618.781 | 151.494 | −448.585 | −5.838 | −0.456 | 0.031 | −0.054 |
| 13 | 868.238 | 696.550 | 646.751 | 46.472 | −5.597 | 1.380 | −0.274 | −0.138 |
| 14 | 24.117 | −147.571 | 481.125 | −118.954 | Failed | Failed | 0.745 | 0.112 |
| 15 | 46.328 | −125.360 | 370.880 | −229.199 | Failed | Failed | 0.094 | −0.077 |
| 16 | 102.159 | −69.529 | 625.169 | 25.090 | Failed | Failed | 0.427 | 0.074 |
| 17 | 246.948 | 75.260 | 624.517 | 24.438 | Failed | Failed | −0.781 | −0.081 |
| 18 | 272.470 | 100.782 | 534.993 | −65.086 | Failed | Failed | −0.542 | −0.056 |
| 19 | 344.668 | 172.980 | 21.858 | −578.221 | Failed | Failed | −0.669 | −0.070 |
| 20 | 362.997 | 191.309 | 485.991 | −114.088 | Failed | Failed | −0.522 | −0.385 |
| 21 | 555.996 | 384.308 | 733.717 | 133.638 | Failed | Failed | −0.372 | 0.247 |
| 22 | 766.269 | 594.581 | 399.006 | −201.073 | Failed | Failed | −0.492 | 0.205 |
| 23 | 824.985 | 653.297 | 846.490 | 246.411 | Failed | Failed | −0.220 | 0.209 |
| 24 | 956.433 | 784.745 | 227.671 | −372.408 | Failed | Failed | 0.608 | 0.709 |
| No | Star Identification in Static Condition | Star Identification in Dynamic Condition | ||||||
|---|---|---|---|---|---|---|---|---|
| Before Restoration | After Restoration | |||||||
| x (pixels) | y (pixels) | Index | Mag | Index | Mag | Index | Mag | |
| 1 | 171.688 | 600.079 | 131907 | 0.3 | 131907 | 0.3 | 131907 | 0.3 |
| 2 | 868.238 | 646.751 | 113271 | 0.6 | 113271 | 0.6 | 113271 | 0.6 |
| 3 | 611.949 | 673.777 | 132346 | 1.8 | Failed | Failed | 132346 | 1.8 |
| 4 | 628.240 | 607.475 | 132444 | 2 | 132444 | 2 | 132444 | 2 |
| 5 | 425.399 | 263.513 | 132542 | 2.2 | 132542 | 2.2 | 132542 | 2.2 |
| 6 | 604.388 | 743.470 | 132220 | 2.5 | 132220 | 2.5 | 132220 | 2.5 |
| 7 | 215.723 | 773.642 | 131794 | 2.9 | 131794 | 2.9 | 131794 | 2.9 |
| 8 | 462.934 | 730.523 | 132071 | 3.4 | 132071 | 3.4 | 132071 | 3.4 |
| 9 | 237.442 | 78.207 | 150801 | 3.7 | Failed | Failed | 150801 | 3.7 |
| 10 | 246.948 | 624.517 | 131952 | 3.7 | 132406 | 3.8 | 131952 | 3.7 |
| 11 | 824.985 | 846.490 | 112921 | 3.7 | 112921 | 3.7 | 112921 | 3.7 |
| 12 | 344.668 | 21.858 | 150957 | 3.8 | Failed | Failed | 150957 | 3.8 |
| 13 | 587.362 | 600.653 | 132406 | 3.8 | Failed | Failed | 132406 | 3.8 |
| 14 | 790.469 | 151.494 | 133012 | 4.1 | Failed | Failed | 133012 | 4.1 |
| 15 | 272.470 | 534.993 | 132067 | 4.2 | Failed | Failed | 132067 | 4.2 |
| 16 | 459.601 | 527.165 | 132320 | 4.2 | 132320 | 4.2 | 132320 | 4.2 |
| 17 | 46.328 | 370.880 | 150340 | 4.3 | Failed | Failed | 150340 | 4.3 |
| 18 | 102.159 | 625.169 | 131824 | 4.3 | Failed | Failed | 131824 | 4.3 |
| 19 | 24.117 | 481.125 | 150223 | 4.5 | Failed | Failed | 150223 | 4.5 |
| 20 | 362.997 | 485.991 | 132222 | 4.6 | Failed | Failed | 132222 | 4.6 |
| 21 | 436.188 | 507.378 | 132301 | 4.7 | Failed | Failed | 132301 | 4.7 |
| 22 | 766.269 | 399.006 | 132732 | 4.7 | Failed | Failed | 132732 | 4.7 |
| 23 | 555.996 | 733.717 | 132176 | 5 | Failed | Failed | 132176 | 5 |
| 24 | 956.433 | 227.671 | 133118 | 5.2 | Failed | Failed | 133118 | 5.2 |
| 25 | 443.191 | 507.327 | 132321 | 5.2 | Failed | Failed | Failed | Failed |
| 26 | 506.795 | 828.620 | 132024 | 5.6 | Failed | Failed | Failed | Failed |
| 27 | 16.063 | 489.609 | 150206 | 5.9 | Failed | Failed | Failed | Failed |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, S.; Zhang, S.; Ning, M.; Zhou, B. Motion Blurred Star Image Restoration Based on MEMS Gyroscope Aid and Blur Kernel Correction. Sensors 2018, 18, 2662. https://doi.org/10.3390/s18082662
Wang S, Zhang S, Ning M, Zhou B. Motion Blurred Star Image Restoration Based on MEMS Gyroscope Aid and Blur Kernel Correction. Sensors. 2018; 18(8):2662. https://doi.org/10.3390/s18082662
Chicago/Turabian StyleWang, Shiqiang, Shijie Zhang, Mingfeng Ning, and Botian Zhou. 2018. "Motion Blurred Star Image Restoration Based on MEMS Gyroscope Aid and Blur Kernel Correction" Sensors 18, no. 8: 2662. https://doi.org/10.3390/s18082662
APA StyleWang, S., Zhang, S., Ning, M., & Zhou, B. (2018). Motion Blurred Star Image Restoration Based on MEMS Gyroscope Aid and Blur Kernel Correction. Sensors, 18(8), 2662. https://doi.org/10.3390/s18082662