Accurate Measurements of Wall Shear Stress on a Plate with Elliptic Leading Edge


Abstract
:1. Introduction
2. Micro-Floating Element Wall Shear Stress Sensor
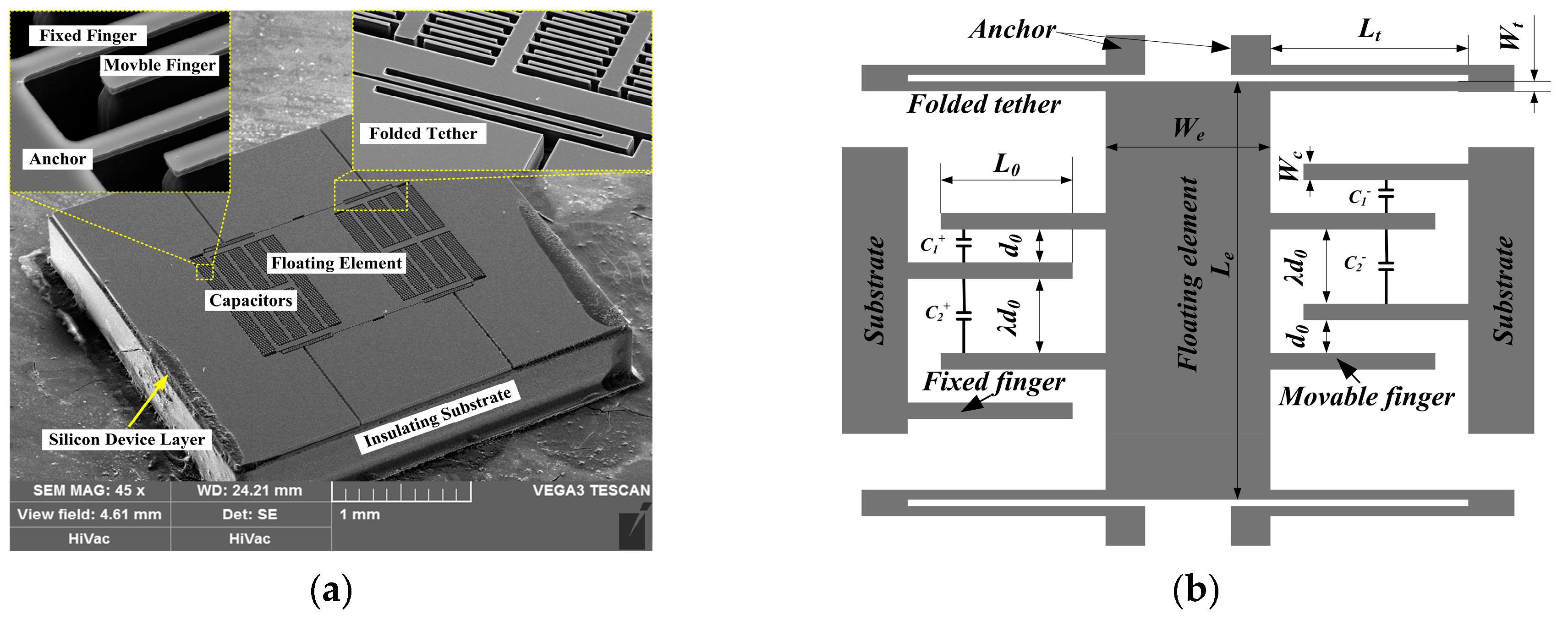
2.1. Sensor Structures
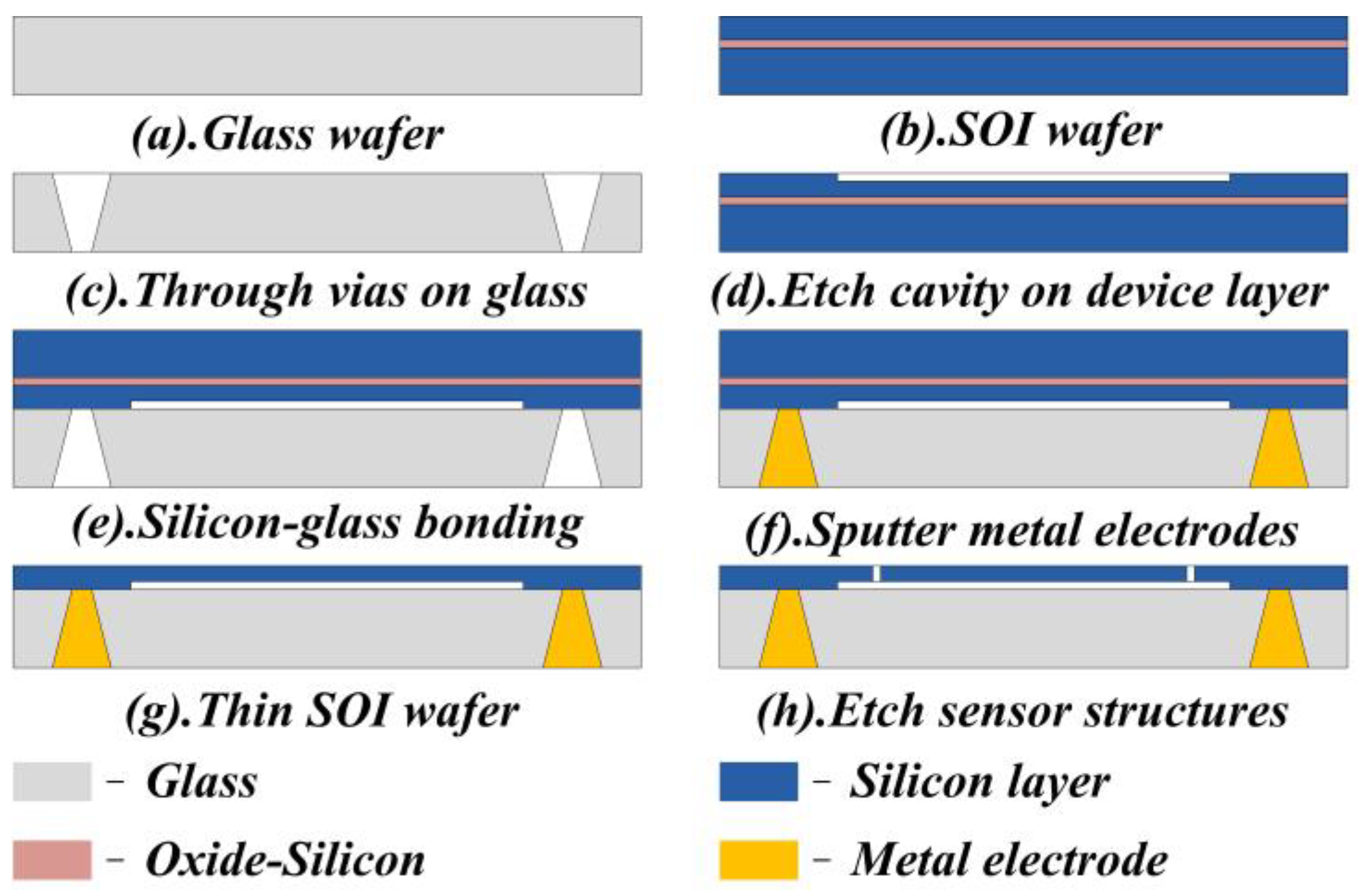
2.2. Fabrication Process
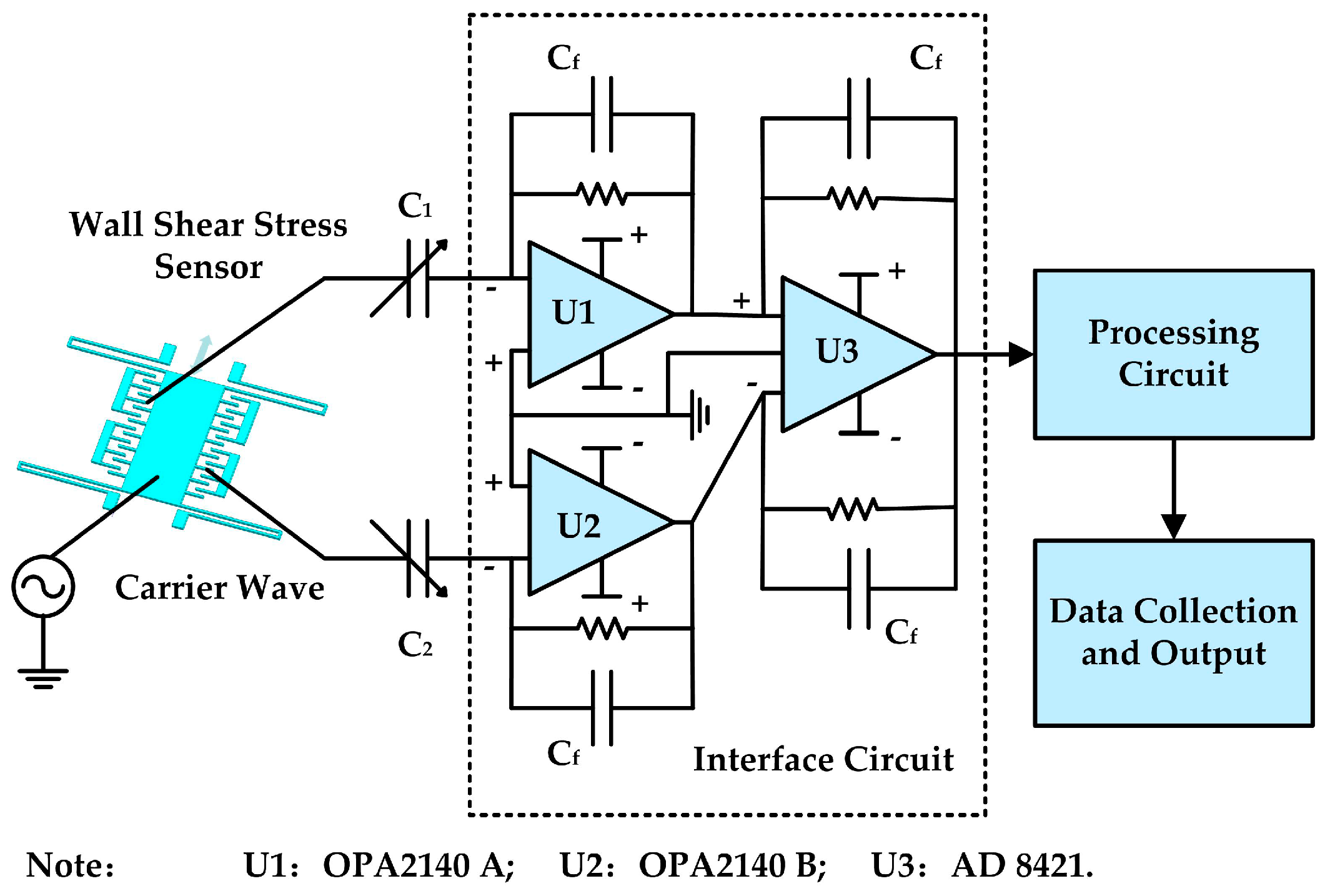
2.3. Interface Circuit and Package
3. Static Calibration of the Micro-Sensor
4. Experiments and Results
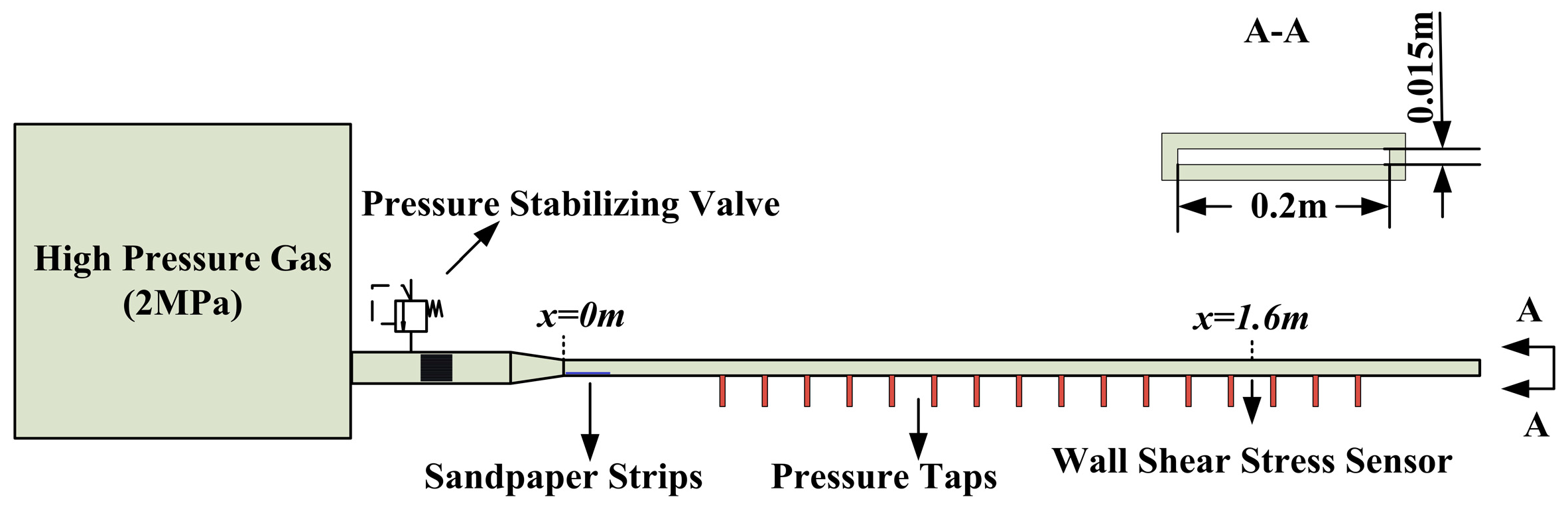
4.1. Plate Model and Flow Condtions
4.2. Results and Discussion
5. Conclusions
- (1)
- The micro-floating element wall shear stress sensor is capable of measuring the accurate wall shear stress under the turbulent boundary layer. Backside connections of the micro-sensor enable non-invasive measurements and keep the measured flow continuous and uninterrupted. Compared to indirect methods, hot film for example, it is less sensitive to temperature variations. Therefore, the floating element wall shear stress sensor tends to obtain quantitative results with a higher precision.
- (2)
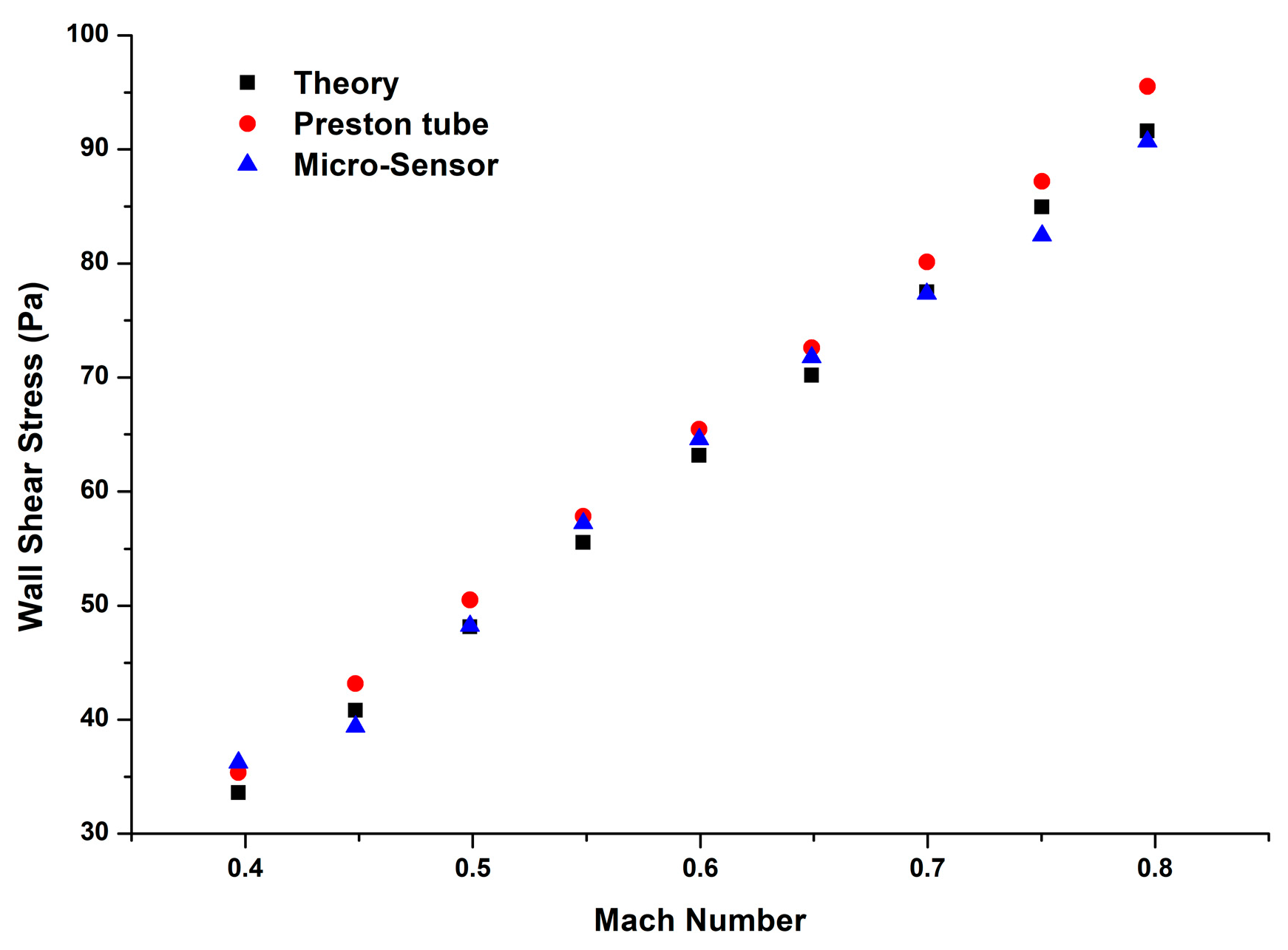
- Results of wall shear stress on the plate model obtained by the floating element wall shear stress sensor are well agreed with both theoretical results and Preston tube results. Preston tube has been proven as an effective method of measuring mean wall shear stress under the turbulent boundary layer. However, a high response frequency of the sensor is required when measuring wall shear stress under the fluctuating airflow.
- (3)
- For further research, higher Mach number airflow should be investigated to verify the potential applications of the micro-floating element wall shear stress sensor. The micro-sensor can be designed with a high resonance frequency of about 10 kHz, which is helpful to observe the development of the turbulent boundary layer and its fluctuations.
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Naughton, J.W.; Sheplak, M. Modern developments in shear-stress measurement. Prog. Aerosp. Sci. 2002, 38, 515–570. [Google Scholar] [CrossRef]
- Onsrud, G.; Persen, L.N.; Saetran, L. On the measurement of wall shear stress. Exp. Fluids 1986, 5, 11–16. [Google Scholar] [CrossRef]
- Patel, V.C. Calibration of the Preston tube and limitations on its use in pressure gradients. Fluid Mech. 1965, 23, 185–208. [Google Scholar] [CrossRef]
- Weiss, J.; Jondeau, E.; Giani, A.; Charlot, B.; Combette, P. Static and dynamic calibration of a MEMS calorimetric shear-stress sensor. Sens. Actuators A Phys. 2017, 265, 211–216. [Google Scholar] [CrossRef]
- Kim, I.C.; Lee, S.J. Characterization of a miniature thermal shear-stress sensor with backside connections. Sens. Actuators A Phys. 2006, 128, 305–311. [Google Scholar] [CrossRef]
- Gnanamanickam, E.P.; Nottebrock, B.; Große, S.; Sullivan, J.P.; Schröder, W. Measurement of turbulent wall shear-stress using micro-pillars. Meas. Sci. Technol. 2013, 24, 124002. [Google Scholar] [CrossRef]
- Gnanamanickam, E.P.; Sullivan, J.P. Manufacture of high aspect ratio micro-pillar wall shear stress sensor arrays. J. Micromech. Microeng. 2012, 22, 125015. [Google Scholar] [CrossRef]
- Ma, C.; Ma, B.; Deng, J.; Yuan, W.; Zhou, Z.; Zhang, H. A high-temperature MEMS surface fence for wall-shear-stress measurement in scramjet flow. Sensors 2017, 17, 2412. [Google Scholar]
- Chandrasekharan, V.; Sells, J.; Meloy, J.; Arnold, D.P.; Sheplak, M. A microscale differential capacitive direct wall-shear-stress sensor. J. Microelectromech. Syst. 2011, 20, 622–635. [Google Scholar] [CrossRef]
- Pan, T.; Hyman, D.; Mehregany, M.; Reshotko, E.; Garverick, S. Microfabricated Shear Stress Sensors, Part 1: Design and Fabrication. AIAA J. 1999, 37, 66–72. [Google Scholar] [CrossRef]
- Zhao, Z.; Shin, M.; Gallman, J.M.; White, R.D. A microfabricated shear sensor array on a chip with pressure gradient calibration. Sens. Actuators A Phys. 2014, 205, 133–142. [Google Scholar] [CrossRef]
- Zhe, J.; Modi, V.; Farmer, K.R. A microfabricated wall shear-stress sensor with capacitive sensing. J. Microelectromech. Syst. 2005, 14, 167–175. [Google Scholar]
- Mills, D.A.; Blood, D.; Sheplak, M. Characterization of a sapphire optical wall shear stress sensor for high-temperature applications. In Proceedings of the 54th AIAA Aerospace Sciences Meeting, San Diego, CA, USA, 4–8 January 2016. [Google Scholar]
- Barlian, A.A.; Park, S.; Mukundan, V.; Pruitt, B.L. Design and characterization of microfabricated piezoresistive floating element-based shear stress sensors. Sens. Actuators A Phys. 2007, 134, 77–87. [Google Scholar] [CrossRef]
- Ding, G.H.; Ma, B.H.; Yuan, W.Z.; Sun, J.W.; Deng, J.J. Development of the floating element wall shear stress sensor with an analytical model. In Proceedings of the 2017 IEEE SENSORS, Glasgow, UK, 29 October–1 November 2017; pp. 1–3. [Google Scholar]
- Sheplak, M.; Cattafesta, L.; Nishida, T.; McGinley, C. MEMS Shear Stress Sensors: Promise and Progress. In Proceedings of the 24th AIAA Aerodynamic Measurement Technology and Ground Testing Conference, Oregon, Portland, 28 June–1 July 2004; pp. 67–76. [Google Scholar]
- Winter, K. An outline of the techniques available for the measurement of skin friction in turbulent boundary layers. Prog. Aerosp. Sci. 1979, 18, 1–57. [Google Scholar] [CrossRef]
- Ho, C.; Tai, Y. Micro-electro-mechanical-systems (MEMS) and fluid flows. Annu. Rev. Fluid Mech. 1998, 30, 579–612. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Parameters | Designed Value/μm | Measured Value/μm |
|---|---|---|
| Width of the floating element/We | 680 | 678.4 |
| Length of the floating element/Le | 1180 | 1178.2 |
| Width of the folded beams/Wt | 10 | 9.2 |
| Length of the folded beams/Lt | 362 | 360.5 |
| Width of the comb fingers /Wc | 5 | 4.7 |
| Length of the comb fingers/Lc | 100 | 102 |
| Overlapping length of comb fingers/L0 | 90 | 90 |
| Thickness of sensor structures/t | 45 | 45 |
| Number of movable comb fingers/N | 237 | 237 |
| Initial gap of neighboring comb fingers/d0 | 3.0 | 4.1 |
| Gap amplification factor/λ | 2.5 | 2.0 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ding, G.-H.; Ma, B.-H.; Deng, J.-J.; Yuan, W.-Z.; Liu, K. Accurate Measurements of Wall Shear Stress on a Plate with Elliptic Leading Edge. Sensors 2018, 18, 2682. https://doi.org/10.3390/s18082682
Ding G-H, Ma B-H, Deng J-J, Yuan W-Z, Liu K. Accurate Measurements of Wall Shear Stress on a Plate with Elliptic Leading Edge. Sensors. 2018; 18(8):2682. https://doi.org/10.3390/s18082682
Chicago/Turabian StyleDing, Guang-Hui, Bing-He Ma, Jin-Jun Deng, Wei-Zheng Yuan, and Kang Liu. 2018. "Accurate Measurements of Wall Shear Stress on a Plate with Elliptic Leading Edge" Sensors 18, no. 8: 2682. https://doi.org/10.3390/s18082682
APA StyleDing, G. -H., Ma, B. -H., Deng, J. -J., Yuan, W. -Z., & Liu, K. (2018). Accurate Measurements of Wall Shear Stress on a Plate with Elliptic Leading Edge. Sensors, 18(8), 2682. https://doi.org/10.3390/s18082682