Quantification of Axial Abnormality Due to Cerebellar Ataxia with Inertial Measurements

 ,
, 
Abstract
:1. Introduction
2. Materials
2.1. Trial Participants
2.2. Inertial Sensor
2.3. Signal Processing
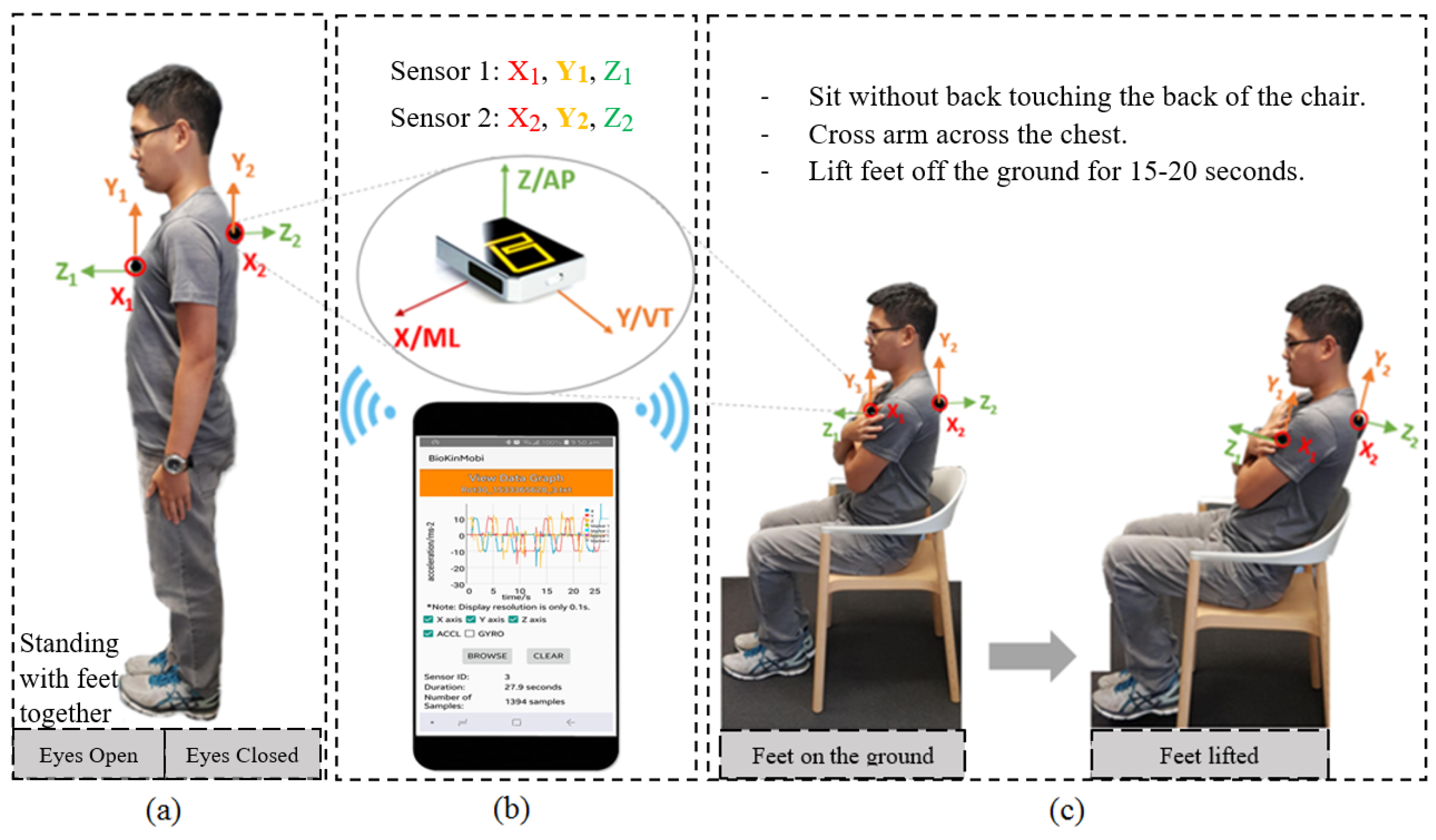
2.4. Clinical Protocol
2.4.1. Romberg Test
2.4.2. Trunk Test
3. Methods
3.1. Root Mean Square
3.2. Approximate Entropy (ApEn)
3.3. Sample Entropy
3.4. Fuzzy Entropy (FuzzyEn)
3.5. Statistical Analysis
4. Results
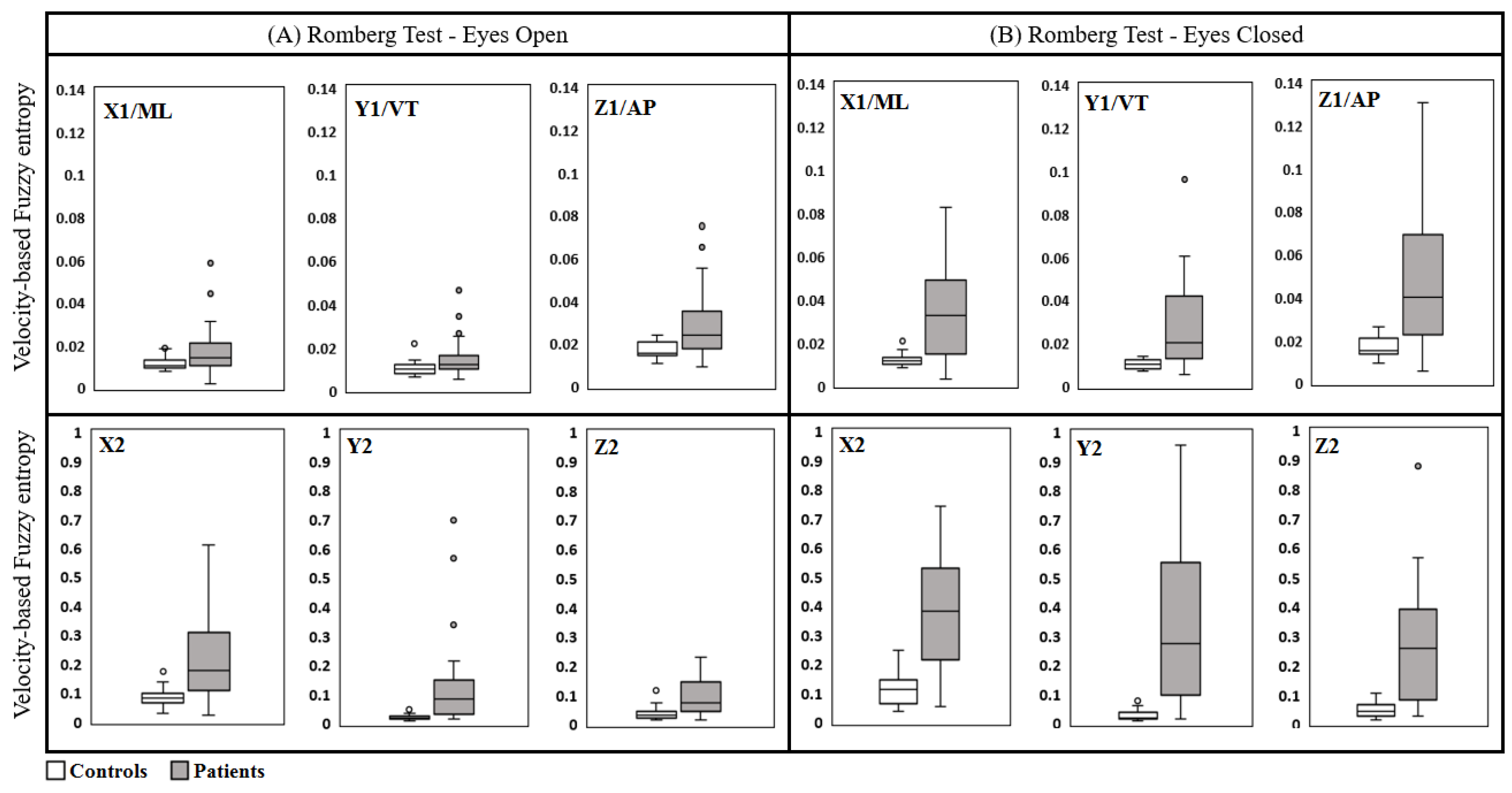
4.1. Romberg Test
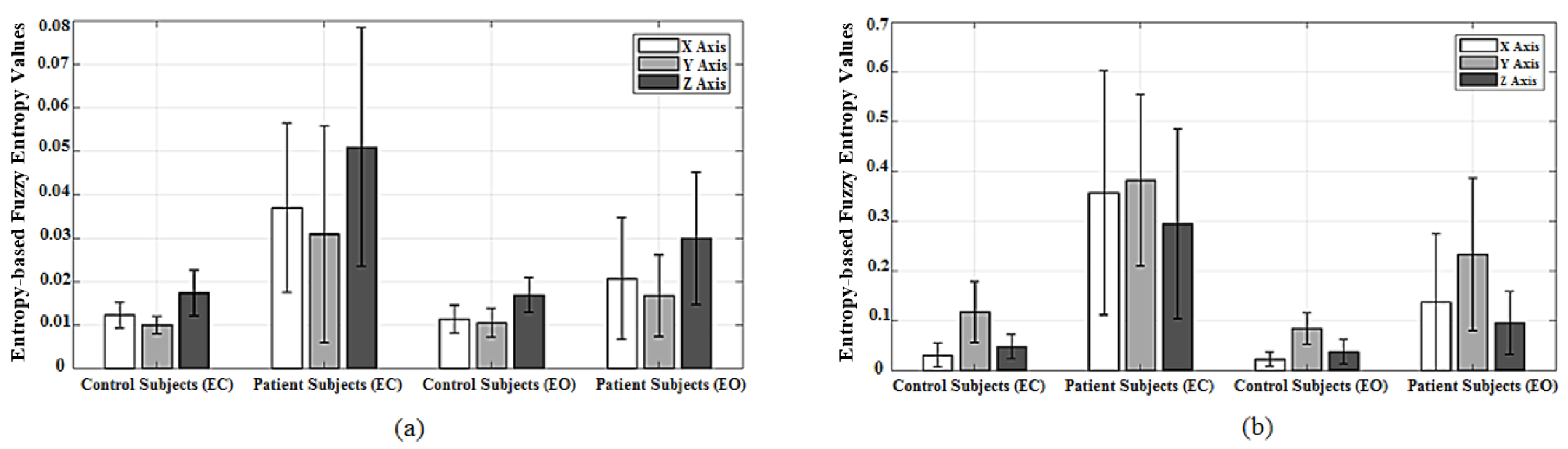
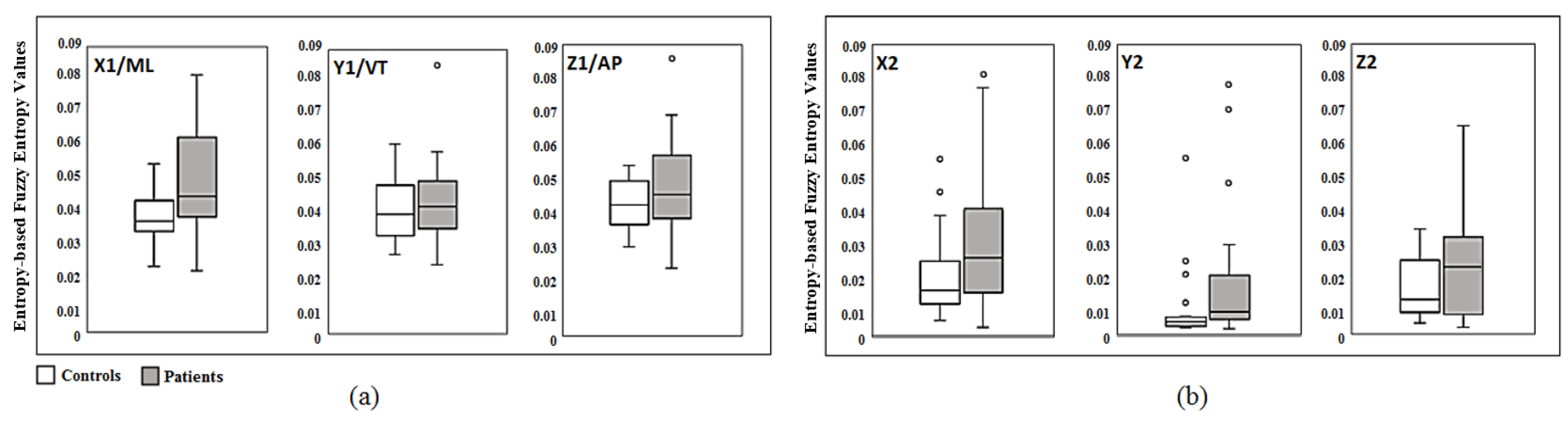
4.2. Trunk Test
5. Discussion
5.1. Entropy as a Complexity Measure
5.2. Assessment Overview of Romberg and Trunk Tests
5.3. Limitations of the Study
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Marquer, A.; Barbieri, G.; Pérennou, D. The assessment and treatment of postural disorders in cerebellar ataxia: A systematic review. Ann. Phys. Rehabil. Med. 2014, 57, 67–78. [Google Scholar] [CrossRef] [PubMed]
- Buckley, E.; Mazzà, C.; McNeill, A. A systematic review of the gait characteristics associated with cerebellar ataxia. Gait Posture 2017, 60, 154–163. [Google Scholar] [CrossRef] [PubMed]
- Benedetti, M.G.; Agostini, V.; Knaflitz, M.; Gasparroni, V.; Boschi, M.; Piperno, R. Self-reported gait unsteadiness in mildly impaired neurological patients: An objective assessment through statistical gait analysis. J. Neuroeng. Rehabil. 2012, 9, 64. [Google Scholar] [CrossRef] [PubMed]
- Stolze, H.; Klebe, S.; Petersen, G.; Raethjen, J.; Wenzelburger, R.; Witt, K.; Deuschl, G. Typical features of cerebellar ataxic gait. J. Neurol. Neurosurg. Psychiatry 2002, 73, 310–312. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bürk, K.; Schulz, S.R.; Schulz, J.B. Monitoring progression in Friedreich ataxia (FRDA): The use of clinical scales. J. Neurochem. 2013, 126, 118–124. [Google Scholar] [CrossRef] [PubMed]
- Schniepp, R.; Schlick, C.; Pradhan, C.; Dieterich, M.; Brandt, T.; Jahn, K.; Wuehr, M. The interrelationship between disease severity, dynamic stability, and falls in cerebellar ataxia. J. Neurol. 2016, 263, 1409–1417. [Google Scholar] [CrossRef] [PubMed]
- Pérennou, D.; Thomas, E.N.; Blain, H. Do French medical schools provide appropriate training on gait and gait disorders? Ann. Phys. Rehabil. Med. 2011, 54, 36–47. [Google Scholar] [CrossRef] [PubMed]
- Kim, S.; Kim, M.; Kim, N.; Kim, S.; Han, G. Quantification and validity of modified Romberg tests using three-axis accelerometers. In Green and Smart Technology with Sensor Applications; Springer: Berlin/Heidelberg, Germany, 2012; pp. 254–261. [Google Scholar]
- Lanska, D.J.; Goetz, C.G. Romberg’s sign development, adoption, and adaptation in the 19th century. Neurology 2000, 55, 1201–1206. [Google Scholar] [CrossRef] [PubMed]
- Reicke, N. The Romberg head-shake test within the scope of equilibrium diagnosis. HNO 1992, 40, 195–201. [Google Scholar] [PubMed]
- Schieppati, M.; Nardone, A. Free and supported stance in Parkinson’s disease: The effect of posture and ‘postural set’ on leg muscle responses to perturbation, and its relation to the severity of the disease. Brain 1991, 114, 1227–1244. [Google Scholar] [CrossRef] [PubMed]
- Verma, S.; Kumar, D.; Kumawat, A.; Dutta, A.; Lahiri, U. A low-cost adaptive balance training platform for stroke patients: A usability study. IEEE Trans. Neural. Syst. Rehabil. Eng. 2017, 25, 935–944. [Google Scholar] [CrossRef] [PubMed]
- Mengarelli, A.; Verdini, F.; Cardarelli, S.; Di Nardo, F.; Burattini, L.; Fioretti, S. Balance assessment during squatting exercise: A comparison between laboratory grade force plate and a commercial, low-cost device. J. Biomech. 2018, 71, 264–270. [Google Scholar] [CrossRef] [PubMed]
- Arpaia, P.; Cimmino, P.; De Matteis, E.; D’Addio, G. A low-cost force sensor-based posturographic plate for home care telerehabilitation exergaming. Measurement 2014, 51, 400–410. [Google Scholar] [CrossRef]
- Matsushima, A.; Yoshida, K.; Genno, H.; Murata, A.; Matsuzawa, S.; Nakamura, K.; Nakamura, A.; Ikeda, S.I. Clinical assessment of standing and gait in ataxic patients using a triaxial accelerometer. Cerebellum Ataxias 2015, 2, 9. [Google Scholar] [CrossRef] [PubMed]
- Mancini, M.; Horak, F.B. The relevance of clinical balance assessment tools to differentiate balance deficits. Eur. J. Phys. Rehabil. Med. 2010, 46, 239. [Google Scholar] [PubMed]
- Mancini, M.; Salarian, A.; Carlson-Kuhta, P.; Zampieri, C.; King, L.; Chiari, L.; Horak, F.B. ISway: A sensitive, valid and reliable measure of postural control. J. Neuroeng. Rehabil. 2012, 9, 59. [Google Scholar] [CrossRef] [PubMed]
- Kusmirek, S.; Hana, K.; Socha, V.; Prucha, J.; Kutilek, P.; Svoboda, Z. Postural instability assessment using trunk acceleration frequency analysis. Eur. J. Physiother. 2016, 18, 237–244. [Google Scholar] [CrossRef]
- Liu, J.; Zhang, X.; Lockhart, T.E. Fall risk assessments based on postural and dynamic stability using inertial measurement unit. Saf. Health Work 2012, 3, 192–198. [Google Scholar] [CrossRef] [PubMed]
- Mancini, M.; Horak, F.B.; Zampieri, C.; Carlson-Kuhta, P.; Nutt, J.G.; Chiari, L. Trunk accelerometry reveals postural instability in untreated Parkinson’s disease. Parkinsonism Relat. Disord. 2011, 17, 557–562. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lipsitz, L.A. Dynamics of stability: The physiologic basis of functional health and frailty. J. Gerontol. Ser. A Biol. Sci. Med. Sci. 2002, 57, B115–B125. [Google Scholar] [CrossRef]
- Nurwulan, N.R.; Jiang, B.C. Possibility of Using Entropy Method to Evaluate the Distracting Effect of Mobile Phones on Pedestrians. Entropy 2016, 18, 390. [Google Scholar] [CrossRef]
- Kitano, H. Systems biology: A brief overview. Science 2002, 295, 1662–1664. [Google Scholar] [CrossRef] [PubMed]
- Busa, M.A.; van Emmerik, R.E. Multiscale entropy: A tool for understanding the complexity of postural control. J. Sport Health Sci. 2016, 5, 44–51. [Google Scholar] [CrossRef]
- Leverick, G.; Wu, C.; Szturm, T. Coarse quantization in calculations of entropy measures for experimental time series. Nonlinear Dyn. 2015, 79, 93–100. [Google Scholar] [CrossRef]
- Fino, P.C.; Mojdehi, A.R.; Adjerid, K.; Habibi, M.; Lockhart, T.E.; Ross, S.D. Comparing postural stability entropy analyses to differentiate fallers and non-fallers. Ann. Biomed. Eng. 2016, 44, 1636–1645. [Google Scholar] [CrossRef] [PubMed]
- Gow, B.J.; Peng, C.K.; Wayne, P.M.; Ahn, A.C. Multiscale entropy analysis of center-of-pressure dynamics in human postural control: Methodological considerations. Entropy 2015, 17, 7926–7947. [Google Scholar] [CrossRef]
- Nurwulan, N.R.; Jiang, B.C.; Iridiastadi, H. Posture and texting: Effect on balance in young adults. PLoS ONE 2015, 10, e0134230. [Google Scholar] [CrossRef] [PubMed]
- Conte, C.; Pierelli, F.; Casali, C.; Ranavolo, A.; Draicchio, F.; Martino, G.; Harfoush, M.; Padua, L.; Coppola, G.; Sandrini, G.; et al. Upper body kinematics in patients with cerebellar ataxia. Cerebellum 2014, 13, 689–697. [Google Scholar] [CrossRef] [PubMed]
- Masani, K.; Vette, A.H.; Abe, M.O.; Nakazawa, K. Center of pressure velocity reflects body acceleration rather than body velocity during quiet standing. Gait Posture 2014, 39, 946–952. [Google Scholar] [CrossRef] [PubMed]
- Vette, A.H.; Masani, K.; Nakazawa, K.; Popovic, M.R. Neural-mechanical feedback control scheme generates physiological ankle torque fluctuation during quiet stance. IEEE Trans. Neural. Syst. Rehabil. Eng. 2010, 18, 86–95. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, N.D.; Pham, T.H.; Pathirana, P.N.; Babazadeh, S.; Page, R.; Seneviratne, A. Sensing and Characterization of the Wrist Using Dart Thrower’s Movement. IEEE Sens. J. 2018, 18, 4145–4153. [Google Scholar] [CrossRef]
- Ekanayake, S.W.; Morris, A.J.; Forrester, M.; Pathirana, P.N. Biokin: An ambulatory platform for gait kinematic and feature assessment. Healthc. Technol. Lett. 2015, 2, 40–45. [Google Scholar] [CrossRef] [PubMed]
- Karunarathne, M.S.; Nguyen, N.D.; Menikidiwela, M.P.; Pathirana, P.N. The study to track human arm kinematics applying solutions of Wahba’s Problem upon inertial/magnetic sensors. In Proceedings of the 14th International Conference on Inclusive Smart Cities and Digital Health, Wuhan, China, 25–27 May 2016; pp. 395–406. [Google Scholar]
- Dijkstra, B.; Kamsma, Y.; Zijlstra, W. Detection of gait and postures using a miniaturised triaxial accelerometer-based system: Accuracy in community-dwelling older adults. Age Ageing 2010, 39, 259–262. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Galán-Mercant, A.; Cuesta-Vargas, A.I. Mobile Romberg test assessment (mRomberg). BMC Res. Notes 2014, 7, 640. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Martinez-Mendez, R.; Sekine, M.; Tamura, T. Postural sway parameters using a triaxial accelerometer: Comparing elderly and young healthy adults. Comput. Methods Biomech. Biomed. Eng. 2012, 15, 899–910. [Google Scholar] [CrossRef] [PubMed]
- Senden, R.; Savelberg, H.; Grimm, B.; Heyligers, I.; Meijer, K. Accelerometry-based gait analysis, an additional objective approach to screen subjects at risk for falling. Gait Posture 2012, 36, 296–300. [Google Scholar] [CrossRef] [PubMed]
- Sekine, M.; Tamura, T.; Yoshida, M.; Suda, Y.; Kimura, Y.; Miyoshi, H.; Kijima, Y.; Higashi, Y.; Fujimoto, T. A gait abnormality measure based on root mean square of trunk acceleration. J. Neuroeng. Rehabil. 2013, 10, 118. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pincus, S.M. Approximate entropy as a measure of system complexity. Proc. Natl. Acad. Sci. USA 1991, 88, 2297–2301. [Google Scholar] [CrossRef] [PubMed]
- Eckmann, J.P.; Ruelle, D. Ergodic theory of chaos and strange attractors. Rev. Mod. Phys. 1985, 57, 617. [Google Scholar] [CrossRef]
- Chen, W.; Zhuang, J.; Yu, W.; Wang, Z. Measuring complexity using fuzzyen, apen, and sampen. Med. Eng. Phys. 2009, 31, 61–68. [Google Scholar] [CrossRef] [PubMed]
- Hanley, J.A.; McNeil, B.J. The meaning and use of the area under a receiver operating characteristic (ROC) curve. Radiology 1982, 143, 29–36. [Google Scholar] [CrossRef] [PubMed]
- Mauritz, K.; Dichgans, J.; Hufschmidt, A. Quantitative analysis of stance in late cortical cerebellar atrophy of the anterior lobe and other forms of cerebellar ataxia. Brain 1979, 102, 461–482. [Google Scholar] [CrossRef] [PubMed]
- Mark, H.; Steve, G.M. Physiologic studies of dysmetria in patients with cerebellar deficits. Can. J. Neurol. Sci. 1993, 20, S83–S92. [Google Scholar] [CrossRef]
- Van de Warrenburg, B.P.; Bakker, M.; Kremer, B.P.; Bloem, B.R.; Allum, J.H. Trunk sway in patients with spinocerebellar ataxia. Mov. Disord. 2005, 20, 1006–1013. [Google Scholar] [CrossRef] [PubMed]
- Chen, W.; Wang, Z.; Xie, H.; Yu, W. Characterization of surface EMG signal based on fuzzy entropy. IEEE Trans. Neural. Syst. Rehabil. Eng. 2007, 15, 266–272. [Google Scholar] [CrossRef] [PubMed]
- Turcot, K.; Allet, L.; Golay, A.; Hoffmeyer, P.; Armand, S. Investigation of standing balance in diabetic patients with and without peripheral neuropathy using accelerometers. Clin. Biomech. 2009, 24, 716–721. [Google Scholar] [CrossRef] [PubMed]
- Moe-Nilssen, R. A new method for evaluating motor control in gait under real-life environmental conditions. Part 1: The instrument. Clin. Biomech. 1998, 13, 320–327. [Google Scholar] [CrossRef]
- Moe-Nilssen, R.; Helbostad, J.L. Trunk accelerometry as a measure of balance control during quiet standing. Gait Posture 2002, 16, 60–68. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Romberg Test | Trunk Test | ||||
|---|---|---|---|---|---|---|
| Sensor 1 | Sensor 2 | Sensor 1 | Sensor 2 | |||
| Eyes Open | Eyes Closed | Eyes Open | Eye Closed | |||
| SampEn (ML) | 0.5214 | 0.6719 | 0.6207 | 0.777 | 0.3176 | 0.2129 |
| SampEn (VT) | 0.4835 | 0.5382 | 0.1162 | 0.1373 | 0.2523 | 0.0037 |
| SampEn (AP) | 0.5069 | 0.5202 | 0.2533 | 0.3877 | 0.3357 | −0.1376 |
| ApEn (ML) | 0.2861 | 0.3475 | 0.5851 | 0.6547 | 0.1454 | 0.2173 |
| ApEn (VT) | 0.1102 | 0.3826 | 0.2474 | 0.1819 | 0.2606 | 0.2421 |
| ApEn (AP) | −0.0035 | 0.1831 | 0.3789 | 0.1002 | 0.0551 | 0.1687 |
| FuzzyEn (ML) | 0.6324 | 0.7925 | 0.5969 | 0.7422 | 0.5282 | 0.4098 |
| FuzzyEn (VT) | 0.6751 | 0.6813 | 0.4936 | 0.6884 | 0.3539 | 0.3956 |
| FuzzyEn (AP) | 0.714 | 0.7581 | 0.4865 | 0.6166 | 0.3485 | 0.264 |
| RMS (ML) | 0.1834 | 0.0691 | −0.2021 | −0.6224 | 0.2015 | −0.4593 |
| RMS (VT) | −0.1618 | −0.0288 | 0.3245 | 0.4358 | −0.1329 | 0.1222 |
| RMS (AP) | −0.1363 | −0.1862 | −0.1053 | 0.2701 | −0.0786 | 0.544 |
| Directions | Romberg Test | Trunk Test | ||||
|---|---|---|---|---|---|---|
| Sensor 1 | Sensor 2 | Sensor 1 | Sensor 2 | |||
| Eyes Open | Eyes Closed | Eyes Open | Eyes Closed | |||
| x-Axis | 0.7353 | 0.8035 | 0.8771 | 0.9265 | 0.7031 | 0.7376 |
| y-Axis | 0.7126 | 0.8356 | 0.8048 | 0.8812 | 0.5743 | 0.6708 |
| z-Axis | 0.7701 | 0.8596 | 0.7901 | 0.8904 | 0.6022 | 0.5921 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, N.; Phan, D.; Pathirana, P.N.; Horne, M.; Power, L.; Szmulewicz, D. Quantification of Axial Abnormality Due to Cerebellar Ataxia with Inertial Measurements. Sensors 2018, 18, 2791. https://doi.org/10.3390/s18092791
Nguyen N, Phan D, Pathirana PN, Horne M, Power L, Szmulewicz D. Quantification of Axial Abnormality Due to Cerebellar Ataxia with Inertial Measurements. Sensors. 2018; 18(9):2791. https://doi.org/10.3390/s18092791
Chicago/Turabian StyleNguyen, Nhan, Dung Phan, Pubudu N. Pathirana, Malcolm Horne, Laura Power, and David Szmulewicz. 2018. "Quantification of Axial Abnormality Due to Cerebellar Ataxia with Inertial Measurements" Sensors 18, no. 9: 2791. https://doi.org/10.3390/s18092791
APA StyleNguyen, N., Phan, D., Pathirana, P. N., Horne, M., Power, L., & Szmulewicz, D. (2018). Quantification of Axial Abnormality Due to Cerebellar Ataxia with Inertial Measurements. Sensors, 18(9), 2791. https://doi.org/10.3390/s18092791