Star Centroiding Based on Fast Gaussian Fitting for Star Sensors

Abstract
:1. Introduction
2. Method Description
2.1. Imaging Characteristics of the Star Sensor
2.2. Characteristics of Gaussian Fitting
2.3. Fast Gaussian Fitting
2.4. Star Centroiding Based on Fast Gaussian Fitting
- (1)
- Star spot extraction: When a star image is obtained, the connected components are extracted to locate the star spots in the image. The number of pixels in each star spot should be no less than 5, otherwise, the star spot will be considered as a false star and removed. In addition, the pixels with full saturated gray value in the star spot are excluded.
- (2)
- The first step: The task of this step is to estimate the SNR of each pixel. The detailed process is as follows:
- (i)
- Initial selection of pixels: Although the noise of each pixel is unknown, the pixels with larger gray values usually have higher SNR, thus their corresponding are closer to 1. According to this idea, the five pixels with the maximum gray values in the star spot are selected as the initial pixels of the set .
- (ii)
- Fast Gaussian fitting: The fast Gaussian fitting method described above is adopted to find the solution of the Gaussian parameters . With these parameters, we can establish the star intensity function, which is:
- (iii)
- Pixel-wise SNR estimation: According to Equation (3) and Equation (18), the noise intensity of each pixel in the star spot can be calculated by Equation (19), and the SNR of each pixel can be estimated by Equation (20):
- (3)
- The second step: Since the SNR of each pixel has been estimated in the previous step, we can solve the star centroid as follows:
- (i)
- Reselect pixels based on SNR: In this step, we will update the pixels in the set by thresholding the SNR. The pixels in the star spot are filtered by judging whether the SNR of the pixel is greater than a threshold and those pixels with SNR greater than the threshold are collected to form the set . is used as the value of the threshold:
- (ii)
- Fast Gaussian fitting: The fast Gaussian fitting method is adopted to find the optimal solution of the Gaussian parameters again. Comparing with the first step in the noise estimation step, more pixels are involved in this step, and the results will be more accurate.
3. Results and Discussion
3.1. Star Images Generation
3.2. Parameter Selection
- (i)
- The number of pixels in set must be no less than 5;
- (ii)
- of each pixel selected should be close enough to 1.
3.3. Accuracy Experiments
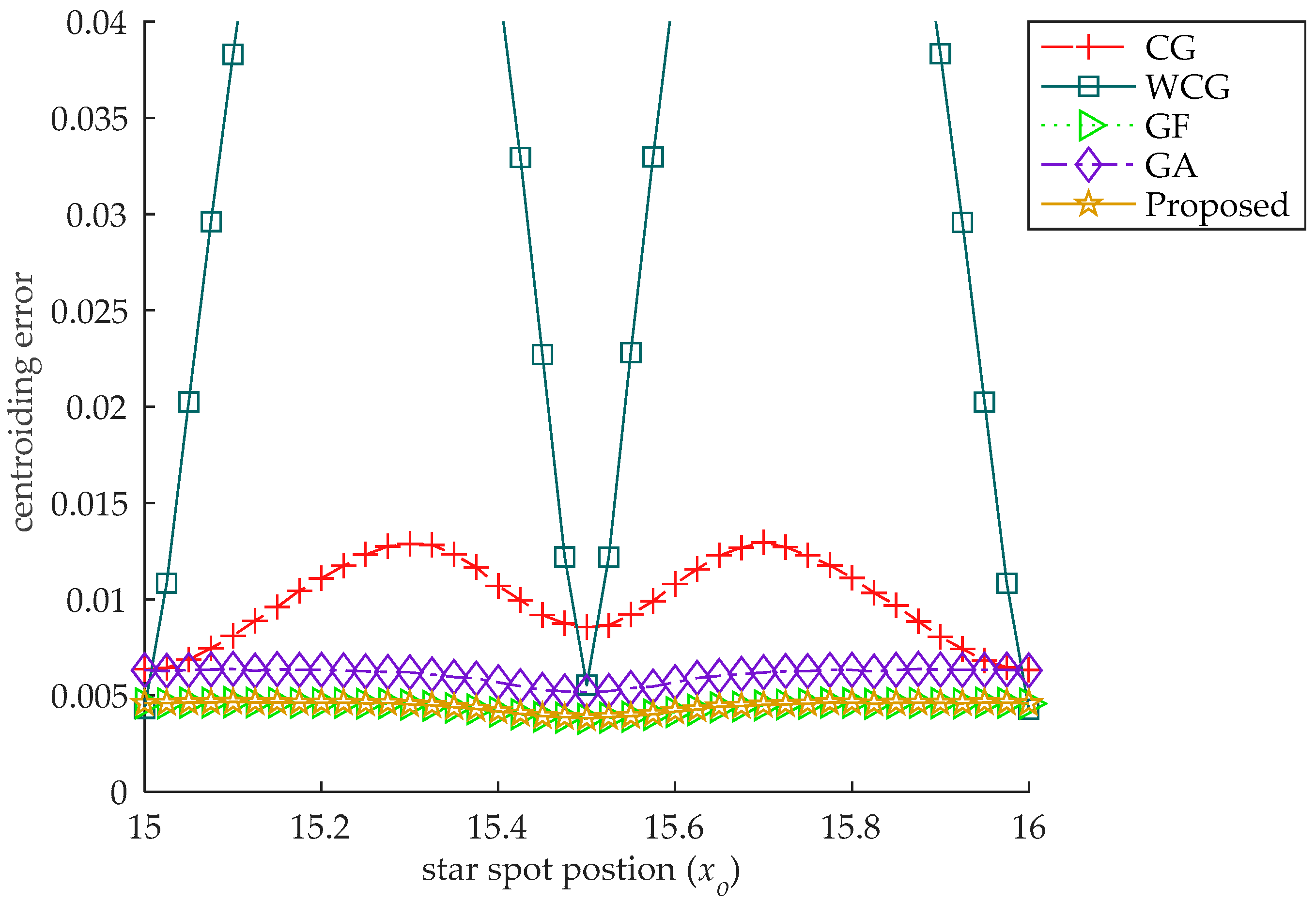
3.3.1. Experiment with the Star Spot at Different Locations
3.3.2. Experiment with Different Gaussian Radius
3.3.3. Experiment with Different Noise Level
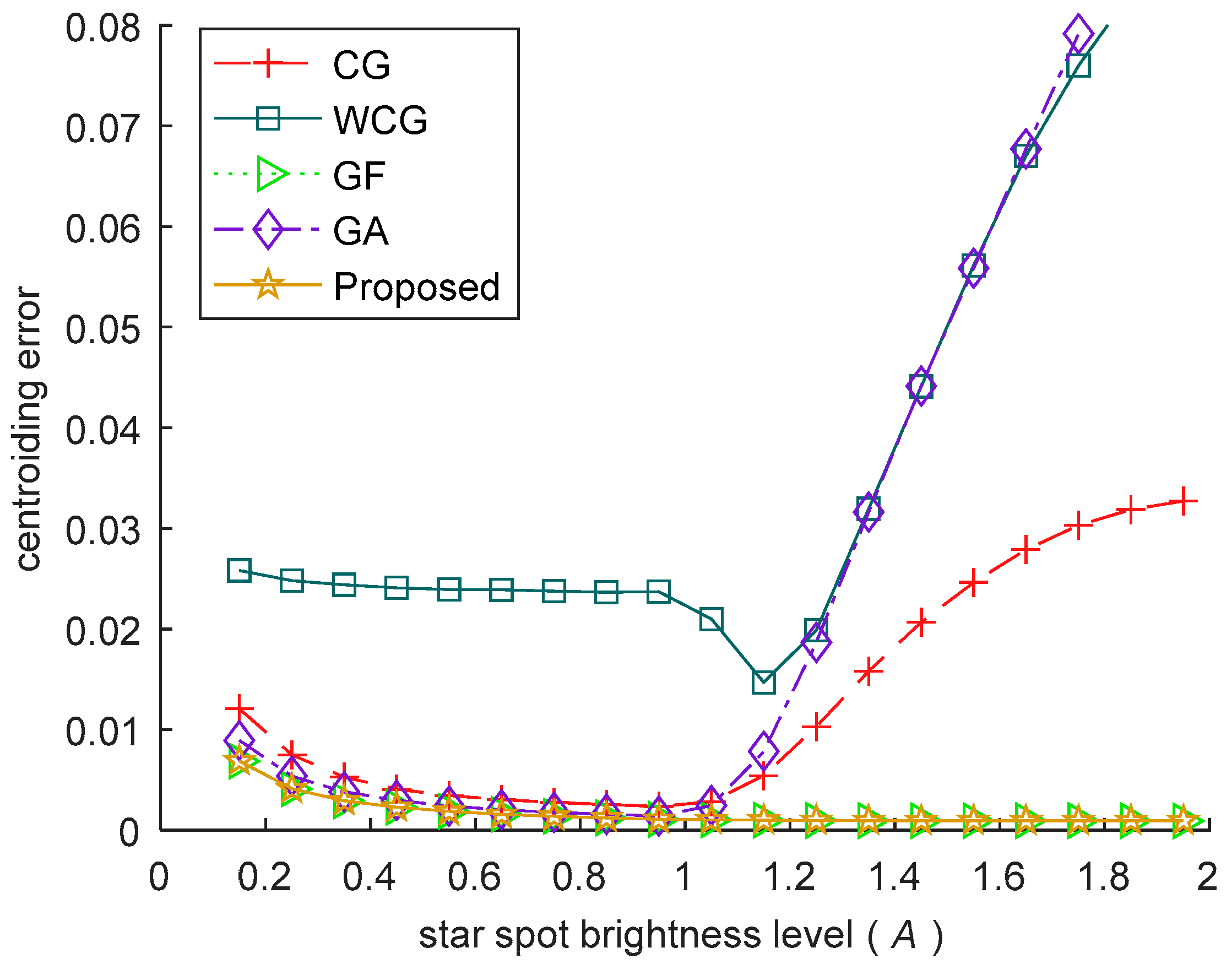
3.3.4. Experiment with Different Brightness Level
- (i)
- When a pixel in the star spot is unsaturated, the SNR of the pixel increases with the star getting brighter, helping to improve the accuracy of the algorithm.
- (ii)
- When a pixel is saturated, the gray value of the pixel is truncated, which makes it different from the true value, leading to the increase of the centroiding error.
3.4. Efficiency Experiment
3.5. Experiment with Star Sensor Imagery
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Liebe, C.C. Accuracy Performance of Star Trackers-A Tutorial. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 587–599. [Google Scholar] [CrossRef]
- Danescu, R.; Ciurte, A.; Turcu, V. A low cost automatic detection and ranging system for space surveillance in the medium Earth orbit region and beyond. Sensors 2014, 14, 2703–2731. [Google Scholar] [CrossRef] [PubMed]
- Hui, F.; Zhao, T.; Li, X. Satellite-Based Sea Ice Navigation for Prydz Bay. East Antarctica. Remote Sens. 2017, 9, 518. [Google Scholar] [CrossRef]
- Vedder, J.D. Star trackers, star catalogs, and attitude determination-Probabilistic aspects of system design. J. Guid. Control Dyn. 2015, 16, 498–504. [Google Scholar] [CrossRef]
- Zhang, B.; Zerubia, J.; Olivomarin, J.C. Gaussian approximations of fluorescence microscope point-spread function models. Appl. Opt. 2007, 46, 1819–1829. [Google Scholar] [CrossRef] [PubMed]
- Stone, R.C. A comparison of digital centering algorithms. Astron. J. 1989, 97, 1227–1237. [Google Scholar] [CrossRef]
- Wei, X.; Xu, J.; Li, J. S-curve centroiding error correction for star sensor. Acta Astronaut. 2014, 99, 231–241. [Google Scholar] [CrossRef]
- Rufino, G.; Accardo, D. Enhancement of the centroiding algorithm for star tracker measure refinement. Acta Astronaut. 2003, 53, 135–147. [Google Scholar] [CrossRef]
- Akondi, V.; Roopashree, M.B. Improved iteratively weighted centroiding for accurate spot detection in laser guide star based Shack Hartmann sensor. In Proceedings of the Atmospheric and Oceanic Propagation of Electromagnetic Waves IV, San Francisco, CA, USA, 26 February 2010. [Google Scholar] [CrossRef]
- Shortis, M.R.; Clarke, T.A.; Short, T. Comparison of some techniques for the subpixel location of discrete target images. In Proceedings of the Videometrics III, Boston, MA, USA, 6 October 1994; Volume 2350, pp. 239–250. [Google Scholar] [CrossRef]
- Lee, H.W.; Park, H.J.; Lee, J.H. Accuracy improvement in peak positioning of spectrally distorted fiber Bragg grating sensors by Gaussian curve fitting. Appl. Opt. 2007, 46, 2205–2207. [Google Scholar] [CrossRef] [PubMed]
- Duan, Y.; Jing, P.; Niu, Z. Star smear removal for full-frame charge-coupled device images based on Gaussian fitting. J. Appl. Remote Sens. 2016, 10. [Google Scholar] [CrossRef]
- Jiang, J.; Xiong, K.; Yu, W. Star centroiding error compensation for intensified star sensors. Opt. Express 2016, 24, 29830–29839. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Xu, E.; Li, Z. Gaussian Analytic Centroiding method of star image of star tracker. Adv. Space Res. 2015, 56, 2196–2205. [Google Scholar] [CrossRef]
- Delabie, T.; Schutter, J.D.; Vandenbussche, B. An Accurate and Efficient Gaussian Fit Centroiding Algorithm for Star Trackers. J. Astronaut. Sci. 2014, 61, 60–84. [Google Scholar] [CrossRef] [Green Version]
- Flewelling, B.R.; Mortari, D. Information Theoretic Weighting for Robust Star Centroiding. J. Astronaut. Sci. 2011, 58, 241–259. [Google Scholar] [CrossRef]
- Holst, G.C. CCD Arrays, Cameras, and Displays, 2nd ed.; A Publication of SPIE-The International Society for Optical Engineering: Bellingham, WA, USA, 1998; pp. 10–15. [Google Scholar]
- Moré, J.J. The Levenberg-Marquardt algorithm: Implementation and theory. In Numerical Analysis; Watson, G.A., Ed.; Springer: Heidelberg/Berlin, Germany, 1978; pp. 32–36. [Google Scholar]
- Coleman, T.F.; Li, Y. An Interior Trust Region Approach for Nonlinear Minimization Subject to Bounds. SIAM J. Optim. 1993, 6, 418–445. [Google Scholar] [CrossRef]
- Shawash, J.; Selviah, D.R. Real-Time Nonlinear Parameter Estimation Using the Levenberg–Marquardt Algorithm on Field Programmable Gate Arrays. IEEE Trans. Ind. Electron. 2012, 60, 170–176. [Google Scholar] [CrossRef]
- Nocedal, J.; Wright, S.J. Numerical Optimization, 2nd ed.; Springer Science: New York, NY, USA, 2006; pp. 101–105. [Google Scholar]
- Duren, R.M.; Liebe, C.C. The SRTM sub-arcsecond metrology camera. In Proceedings of the 2001 IEEE Aerospace Conference Proceedings, Big Sky, MT, USA, 10–17 March 2001. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | CG | WCG | GF | GA | Proposed |
|---|---|---|---|---|---|
| time (s) | 1.3504 | 1.3878 | 58.9863 | 1.4915 | 3.9675 |
| (1048, 847) | (493, 559) | |||
|---|---|---|---|---|
| X-Coordinate | Y-Coordinate | X-Coordinate | Y-Coordinate | |
| CG | 0.0082 | 0.0095 | 0.0159 | 0.0200 |
| Proposed | 0.0060 | 0.0062 | 0.0175 | 0.0233 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wan, X.; Wang, G.; Wei, X.; Li, J.; Zhang, G. Star Centroiding Based on Fast Gaussian Fitting for Star Sensors. Sensors 2018, 18, 2836. https://doi.org/10.3390/s18092836
Wan X, Wang G, Wei X, Li J, Zhang G. Star Centroiding Based on Fast Gaussian Fitting for Star Sensors. Sensors. 2018; 18(9):2836. https://doi.org/10.3390/s18092836
Chicago/Turabian StyleWan, Xiaowei, Gangyi Wang, Xinguo Wei, Jian Li, and Guangjun Zhang. 2018. "Star Centroiding Based on Fast Gaussian Fitting for Star Sensors" Sensors 18, no. 9: 2836. https://doi.org/10.3390/s18092836
APA StyleWan, X., Wang, G., Wei, X., Li, J., & Zhang, G. (2018). Star Centroiding Based on Fast Gaussian Fitting for Star Sensors. Sensors, 18(9), 2836. https://doi.org/10.3390/s18092836