Development of a High-Sensitivity Optical Accelerometer for Low-Frequency Vibration Measurement



Abstract
:1. Introduction
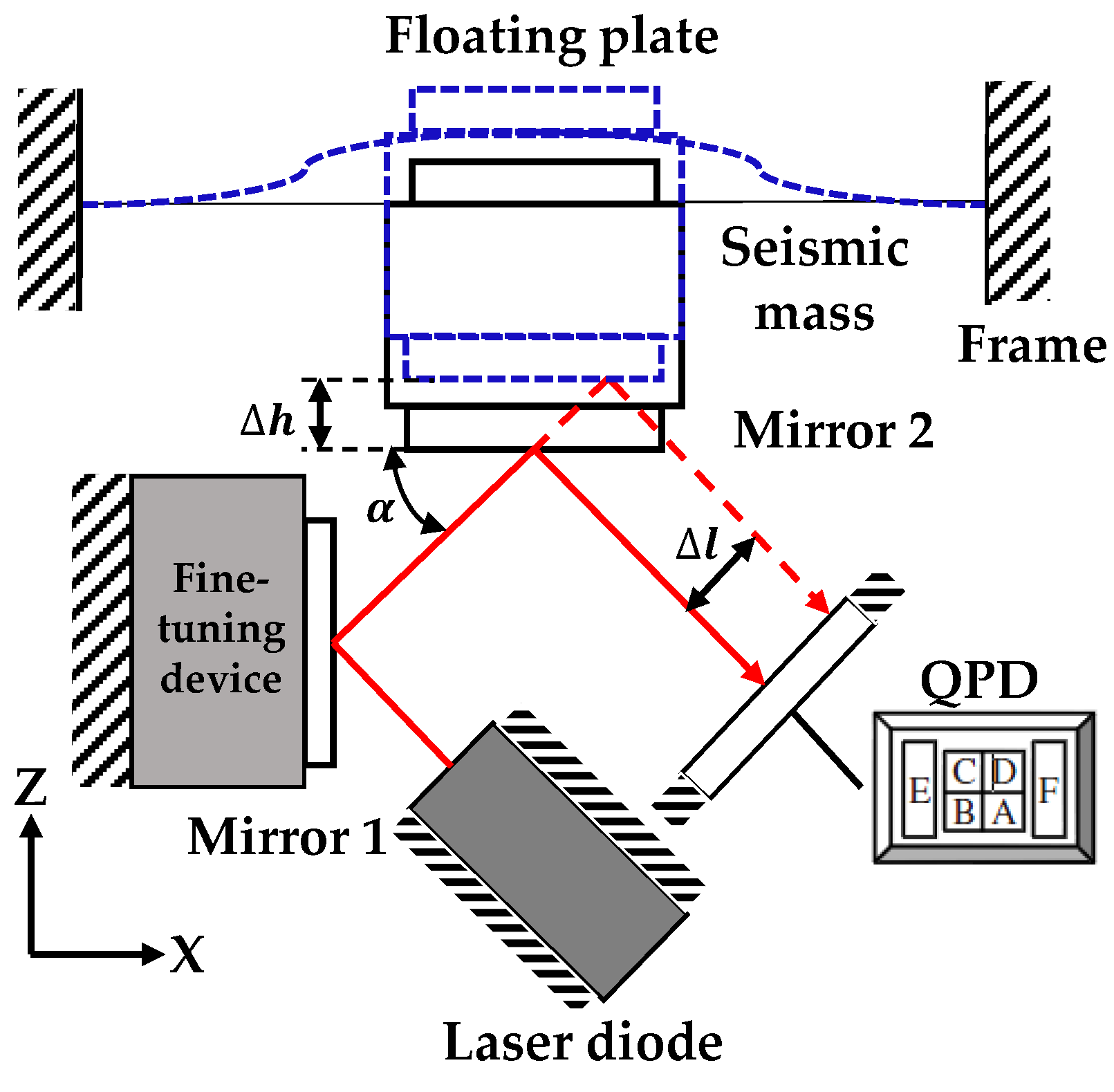
2. Structure and Principle
3. Design, Analysis and Fabrication
4. Experimental Setup and Measurement Results
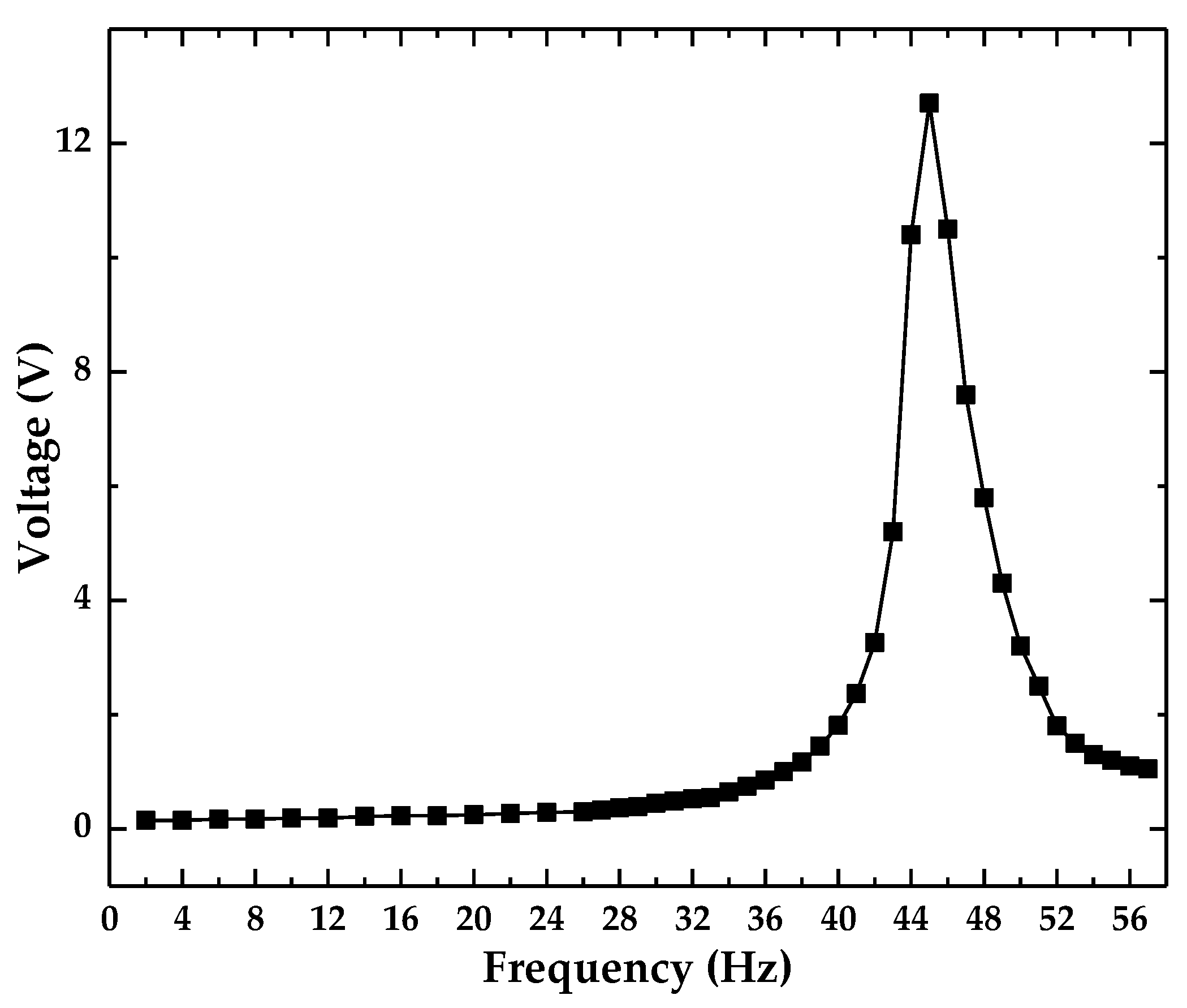
4.1. Resonance Frequency Measurement
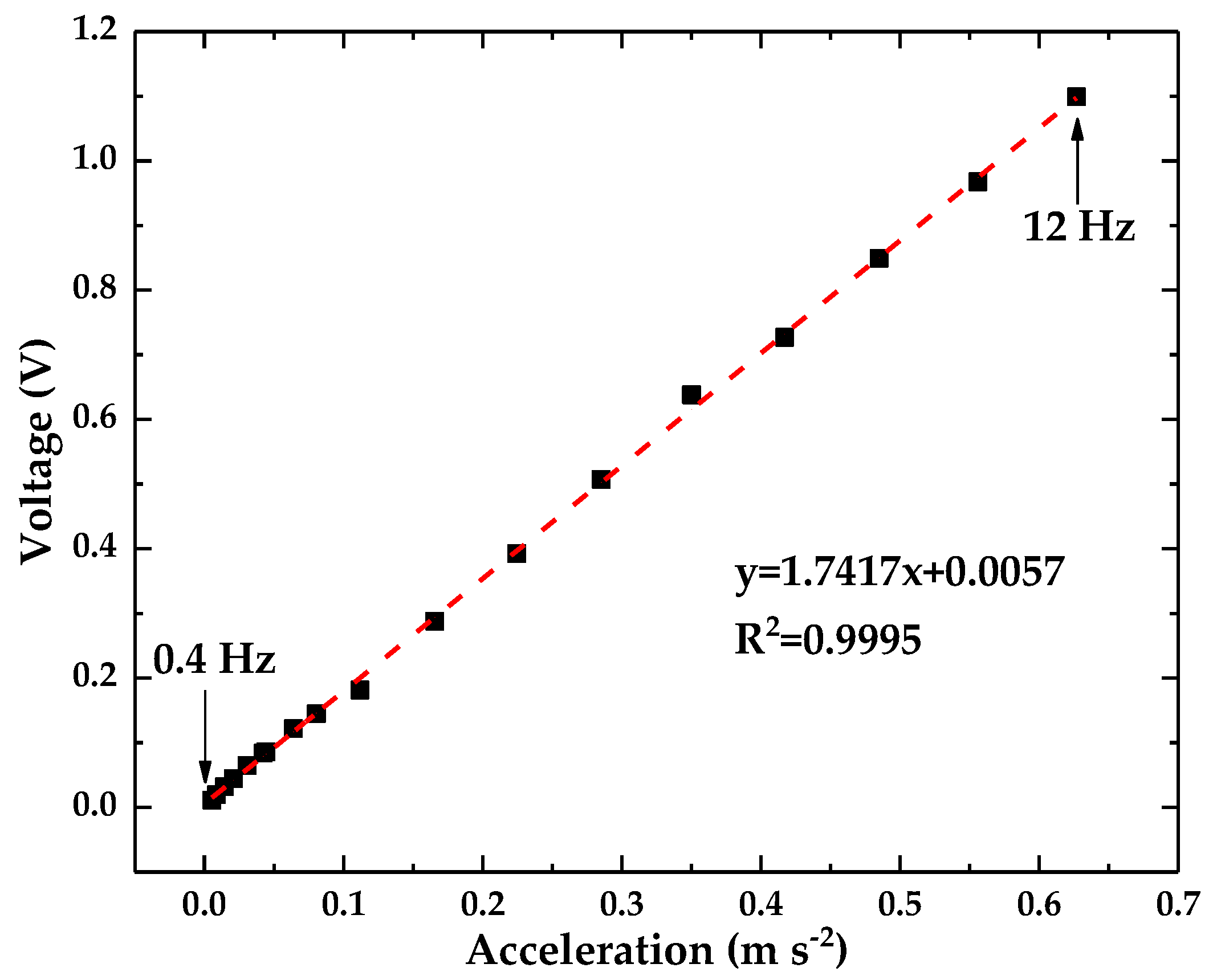
4.2. Acceleration Sensitivity Measurement at Low-Frequency
4.3. Frequency Response Range, Acceleration Detection Range and Phase-Frequency Response
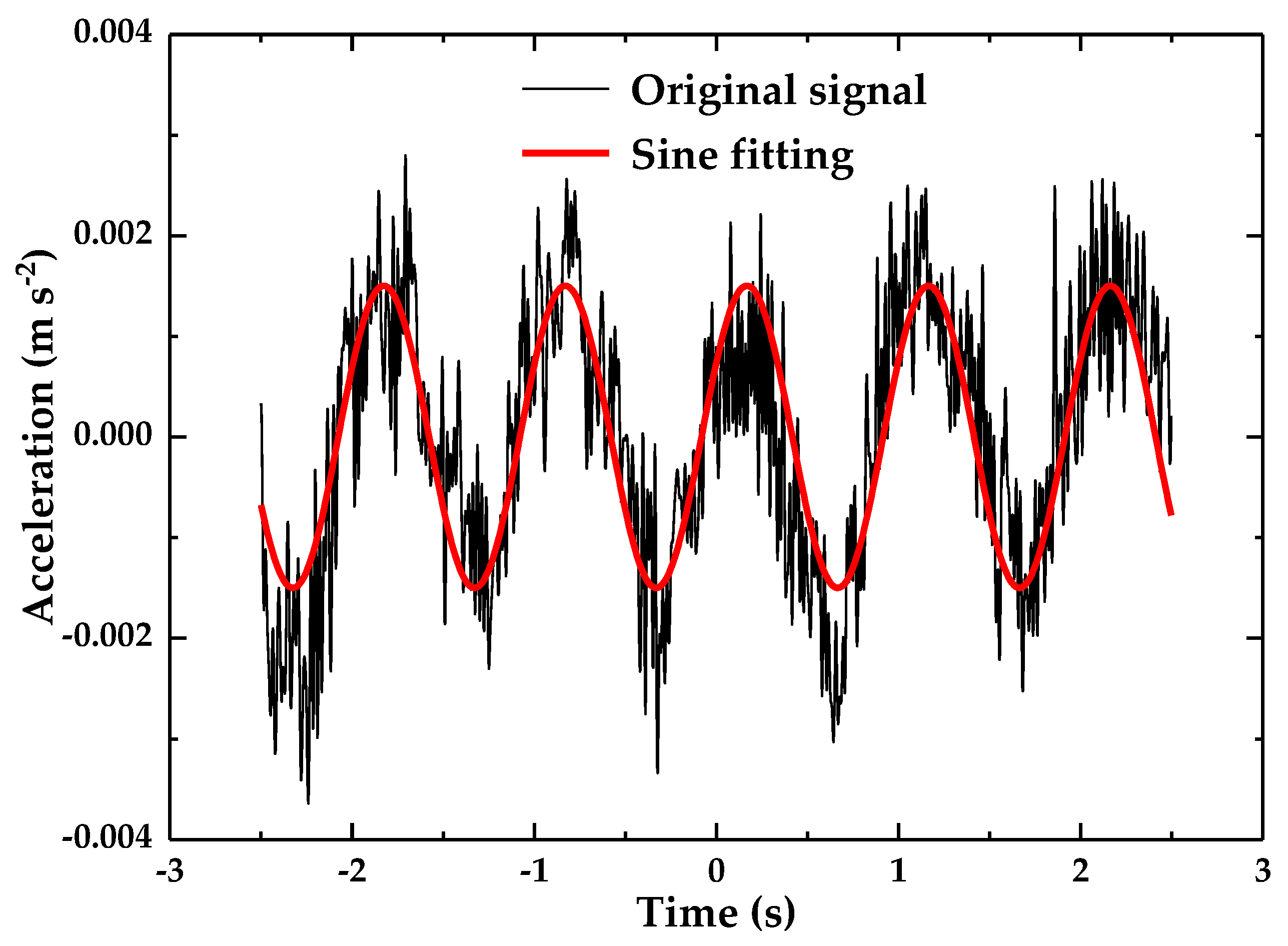
4.4. Noise Equivalent Acceleration Measurement.
4.5. Signal Drift of the Optical Accelerometer
5. Discussions and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Bard, P.Y. Microtremor measurements: A tool for site effect estimation. Eff. Surf. Geol. Seism. Motion 1999, 3, 1251–1279. [Google Scholar]
- Seht, I.V.; Wohlenberg, J. Microtremor measurements used to map thickness of soft sediments. Bull. Seismol. Soc. Am. 1999, 89, 250–259. [Google Scholar]
- Tian, B.; Liu, H.; Yang, N.; Zhao, Y.; Jiang, Z. Design of a Piezoelectric Accelerometer with High Sensitivity and Low Transverse Effect. Sensors 2016, 16, 1587. [Google Scholar] [CrossRef] [PubMed]
- Zou, Q.; Tan, W.; Kim, E.S.; Loeb, G.E. Highly symmetric tri-axis piezoelectric bimorph accelerometer. In Proceedings of the IEEE International Conference on MICRO Electro Mechanical Systems, Maastricht, The Netherlands, 25–29 January 2004; pp. 197–200. [Google Scholar]
- Hewa-Kasakarage, N.N.; Kim, D.; Kuntzman, M.L.; Hall, N.A. Micromachined Piezoelectric Accelerometers via Epitaxial Silicon Cantilevers and Bulk Silicon Proof Masses. J. Microelectromech. Syst. 2013, 22, 1438–1446. [Google Scholar] [CrossRef]
- Tims, A.C.; Davidson, R.L.; Timme, R.W. High sensitivity piezoelectric accelerometer. Rev. Sci. Instrum. 1975, 46, 554–558. [Google Scholar] [CrossRef]
- Kamentser, B. New Generation of Strain Gauge Accelerometers. SAE Tech. Paper 1994. [Google Scholar] [CrossRef]
- Santana, J.; Hoven, R.V.D.; van Liempd, C.; Colin, M.; Saillen, N.; Zonta, D.; Trapani, D.; Torfs, T.; Van Hoof, C. A 3-axis accelerometer and strain sensor system for building integrity monitoring. Sens. Actuators A Phys. 2012, 188, 141–147. [Google Scholar] [CrossRef]
- Liu, F.; Dai, Y.; Karanja, J.M.; Yang, M. A Low Frequency FBG Accelerometer with Symmetrical Bended Spring Plates. Sensors 2017, 17, 206. [Google Scholar] [CrossRef] [PubMed]
- Gao, X.; Wang, Y.; Yuan, B.; Yuan, Y.; Dai, Y.; Xu, G. Low-cost vibration sensor based on dual fiber Bragg gratings and light intensity measurement. Appl. Opt. 2013, 52, 6782–6787. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.H.; Qiao, X.G.; Hu, M.L; Feng, Z.; Gao, H.; Yang, Y.; Zhou, R. Flextensional fiber Bragg grating-based accelerometer for low frequency vibration measurement. Chin. Opt. Lett. 2011, 9, 25–28. [Google Scholar]
- Zhang, X.; Rong, Q.; Sun, H.; Yang, S.; Yuan, L.; Hu, M. Low-frequency fiber Bragg grating accelerometer based on a double-semicircle cantilever. Opt. Fiber Technol. 2014, 20, 190–193. [Google Scholar] [CrossRef]
- Zeng, Y.J.; Wang, J.; Yang, H.Y. Fiber Bragg Grating Accelerometer Based on L-Shaped Rigid Beam and Elastic Diaphragm for Low-Frequency Vibration Measurement. Chin. Opt. Lett. 2015, 35, 90–98. [Google Scholar] [CrossRef]
- Li, K.; Chan, T.H.; Yau, M.H.; Nguyen, T.; Thambiratnam, D.P.; Tam, H.Y. Very sensitive fiber Bragg grating accelerometer using transverse forces with an easy over-range protection and low cross axial sensitivity. Appl. Opt. 2013, 52, 6401–6410. [Google Scholar] [CrossRef] [PubMed]
- Sabato, A.; Feng, M.Q. Feasibility of Frequency-Modulated Wireless Transmission for a Multi-Purpose MEMS-Based Accelerometer. Sensors 2014, 14, 16563–16585. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sabato, A.; Feng, M.Q.; Fukuda, Y.; Carní, D.L.; Fortino, G. A Novel Wireless Accelerometer Board for Measuring Low-Frequency and Low-Amplitude Structural Vibration. IEEE Sens. J. 2016, 16, 2942–2949. [Google Scholar] [CrossRef]
- Zhu, L.; Fu, Y.; Chow, R.; Spencer, B.F.; Park, J.W.; Mechitov, K. Development of a High-Sensitivity Wireless Accelerometer for Structural Health Monitoring. Sensors 2018, 18, 262. [Google Scholar] [CrossRef] [PubMed]
- Swartz, R.A.; Lynch, J.P.; Zerbst, S.; Sweetman, B.; Rolfes, R. Structural monitoring of wind turbines using wireless sensor networks. Smart Struct. Syst. 2010, 6, 183–196. [Google Scholar] [CrossRef] [Green Version]
- Cho, S.; Yun, C.-B.; Lynch, J.P.; Zimmerman, A.T.; Spencer, B.F., Jr.; Nagayama, T. Smart wireless sensor technology for structural health monitoring of civil structures. Int. J. Steel Struct. 2008, 8, 267–275. [Google Scholar]
- Whelan, M.J.; Janoyan, K.D. Design of a robust, high-rate wireless sensor network for static and dynamic structural monitoring. J. Intell. Mater. Syst. Struct. 2009, 20, 849–863. [Google Scholar] [CrossRef]
- Meyer, J.; Bischoff, R.; Feltrin, G. Microelectromechanical systems (MEMS). In Encyclopedia of Structural Health Monitoring; Boller, C., Chang, F.K., Fujino, Y., Eds.; Wiley: New York, NY, USA, 2009. [Google Scholar]
- Rice, J.A.; Spencer, B.F., Jr. Structural health monitoring sensor development for the Imote2 platform. Proc. SPIE 2008, 6932, 693234–693244. [Google Scholar]
- Kohler, M.D.; Hao, S.; Mishra, N.; Govindan, R.; Nigbor, R. ShakeNet: A Portable Wireless Sensor Network for Instrumenting Large Civil Structures; Technical Report 2015-1134; United States Geological Survey: Los Angeles, CA, USA, 2015; p. 31. [Google Scholar]
- Kohler, M.D.; Heaton, T.H.; Cheng, M.-H. The Community Seismic Network and Quake-Catcher Network: Enabling Structural Health Monitoring through Instrumentation by Community Participants. In Proceedings of the SPIE International Society for Optical Engineering, Bellingham, WA, USA, 19 April 2013; Volume 8692, p. 86923. [Google Scholar]
- Chu, C.L.; Lin, C.H. Development of an optical accelerometer with a DVD pick-up head. Meas. Sci. Technol. 2005, 16, 2498. [Google Scholar] [CrossRef]
- Liu, Y.C.; Fan, K.C.; Chu, C.L.; Werner, C.A.; Jäger, G. Development of an optical accelerometer for low-frequency vibration using the voice coil on a DVD pickup head. Meas. Sci. Technol. 2008, 19, 817–822. [Google Scholar] [CrossRef]
- Chu, C.L.; Lin, C.H.; Fan, K.C. Two-dimensional optical accelerometer based on commercial DVD pick-up head. Meas. Sci. Technol. 2007, 18, 265. [Google Scholar] [CrossRef]
- Zheng, D.; Liu, Y.; Guo, Z.; Zhao, X.; Fan, S. Theory and experiment research for ultra-low frequency maglev vibration sensor. Rev. Sci. Instrum. 2015, 86, 105001. [Google Scholar] [CrossRef] [PubMed]
- Jiang, D.; Zhang, W.; Li, F. All-metal optical fiber accelerometer with low transverse sensitivity for seismic monitoring. IEEE Sens. J. 2013, 13, 4556–4560. [Google Scholar] [CrossRef]
- Lin, Q.; Chen, L.; Li, S.; Wu, X. A high-resolution fiber optic accelerometer based on intracavity phase-generated carrier (PGC) modulation. Meas. Sci. Technol. 2011, 22, 15303–15308. [Google Scholar] [CrossRef]
- Li, R.J.; Lei, Y.J.; Zhang, L.S.; Chang, Z.X.; Fan, K.C.; Cheng, Z.Y.; Hu, P.H. High-precision and low-cost vibration generator for low-frequency calibration system. Meas. Sci. Technol. 2018, 29, 034008. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Liu, Y.; Li, W.; Feng, Z. Design of ultrastable and high resolution eddy-current displacement sensor system. In Proceedings of the IECON 2014—40th Annual Conference of the IEEE Industrial Electronics Society, Dallas, TX, USA, 29 October–1 November 2014; Volume 2015, pp. 2333–2339. [Google Scholar]
- Wang, H.; Feng, Z. Ultrastable and highly sensitive eddy current displacement sensor using self-temperature compensation. Sens. Actuators A Phys. 2013, 203, 362–368. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Principle | Sensitivity (V/g) | Range (g) | BW (Hz) | Noise-Density (μg Hz−1/2) | Study |
|---|---|---|---|---|---|
| PZT | 9 mV/g | – | – | – | [3] |
| X-0.93 mV/g | >0.04 | <100 | – | [4] | |
| Y-1.13 mV/g | |||||
| Z-0.88 mV/g | |||||
| 15.6 mV/g | – | 60–1.5 k | 1.7 | [5] | |
| 2.82 | – | 2–500 | – | [6] | |
| Strain | – | 0–5 | <100 | – | [7] |
| Variable | ±20,000 με | <100 | 70 | [8] | |
| FBG | * | – | 0.7–20 | – | [9] |
| 0.135 | 0.1–2 | 80–800 | – | [10] | |
| 0.362 | < 0.5 | 1–10 | – | [11] | |
| * | – | 0–25 | – | [12] | |
| * | 0.5–1.5 | 20–70 | – | [13] | |
| * | 0.1–0.4 | 5–15 | – | [14] | |
| MEMS | 1.2 | ±3 | 0.2–1500 | 0.3 | [15,16] |
| 2 | ±1 | 0–50 | 70 | [18] | |
| 1 | ±2 | 0–50 | 140 | [19] | |
| 0.66 | ±2 | 0–100 | 30 | [20] | |
| 0.66/0.22 | ±6/±2 | 0–100 | 30 | [21] | |
| 0.66 | ±2 | 0–50 | 50 | [22] | |
| 1.2 | ±3 | 0–1500 | 0.3 | [23,24] | |
| Optical | 12.28 | <0.017 ★ | 3–24 | 20 | [25] |
| 24.36 | <0.0023 ★ | 3–6 | – | [26] | |
| 22.9 | <0.08 ★ | 0.5–50 | 30 | [27] | |
| Others | – | – | 0.2–0.4 | – | [28] |
| * | – | 5–400 | 0.09 | [29] | |
| – | – | 20–140 | 0.048 | [30] |
| Thickness (mm) | Leaf Spring Shape | Resonant Frequency (Hz) | Statics Deformation (μm) | Elastic Coefficient (mN/μm) | ||
|---|---|---|---|---|---|---|
| 1st Order | 2nd Order | 3rd Order | ||||
| 0.1 | a | 70.33 | 2156.2 | 2158.9 | 50.527 | 1.21 |
| b | 20.82 | 24.01 | 24.11 | 577.53 | 0.11 | |
| c | 48 | 1245.6 | 1246.5 | 81.61 | 0.56 | |
| d | 76.02 | 2411.9 | 2414.2 | 43.03 | 1.42 | |
| 0.15 | a | 121.87 | 135.85 | 136.77 | 16.96 | 3.61 |
| b | 31.26 | 35.66 | 35.73 | 256.54 | 0.24 | |
| c | 89.35 | 108.73 | 109.57 | 24.92 | 1.96 | |
| d | 135.64 | 3299.2 | 3306.5 | 13.53 | 4.52 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, R.-J.; Lei, Y.-J.; Chang, Z.-X.; Zhang, L.-S.; Fan, K.-C. Development of a High-Sensitivity Optical Accelerometer for Low-Frequency Vibration Measurement. Sensors 2018, 18, 2910. https://doi.org/10.3390/s18092910
Li R-J, Lei Y-J, Chang Z-X, Zhang L-S, Fan K-C. Development of a High-Sensitivity Optical Accelerometer for Low-Frequency Vibration Measurement. Sensors. 2018; 18(9):2910. https://doi.org/10.3390/s18092910
Chicago/Turabian StyleLi, Rui-Jun, Ying-Jun Lei, Zhen-Xin Chang, Lian-Sheng Zhang, and Kuang-Chao Fan. 2018. "Development of a High-Sensitivity Optical Accelerometer for Low-Frequency Vibration Measurement" Sensors 18, no. 9: 2910. https://doi.org/10.3390/s18092910
APA StyleLi, R. -J., Lei, Y. -J., Chang, Z. -X., Zhang, L. -S., & Fan, K. -C. (2018). Development of a High-Sensitivity Optical Accelerometer for Low-Frequency Vibration Measurement. Sensors, 18(9), 2910. https://doi.org/10.3390/s18092910