A Broadband Beamformer Suitable for UUV to Detect the Tones Radiated from Marine Vessels

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (a)
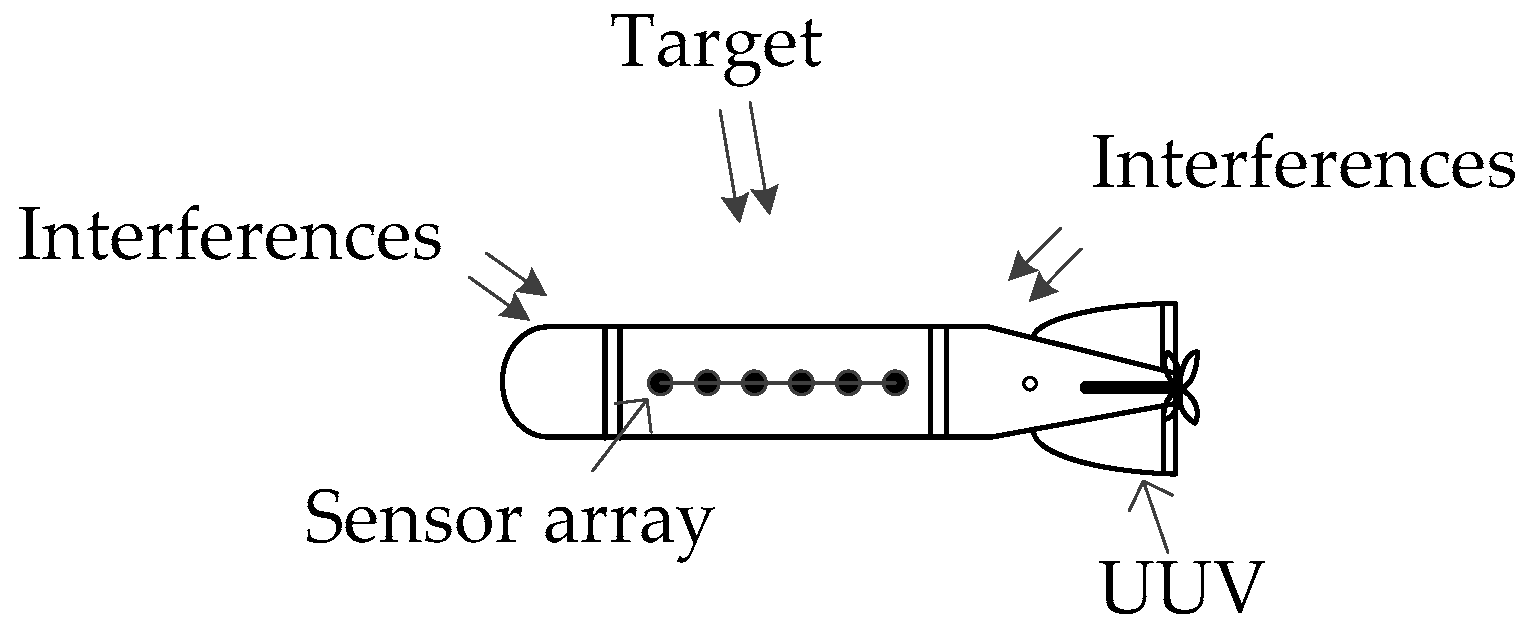
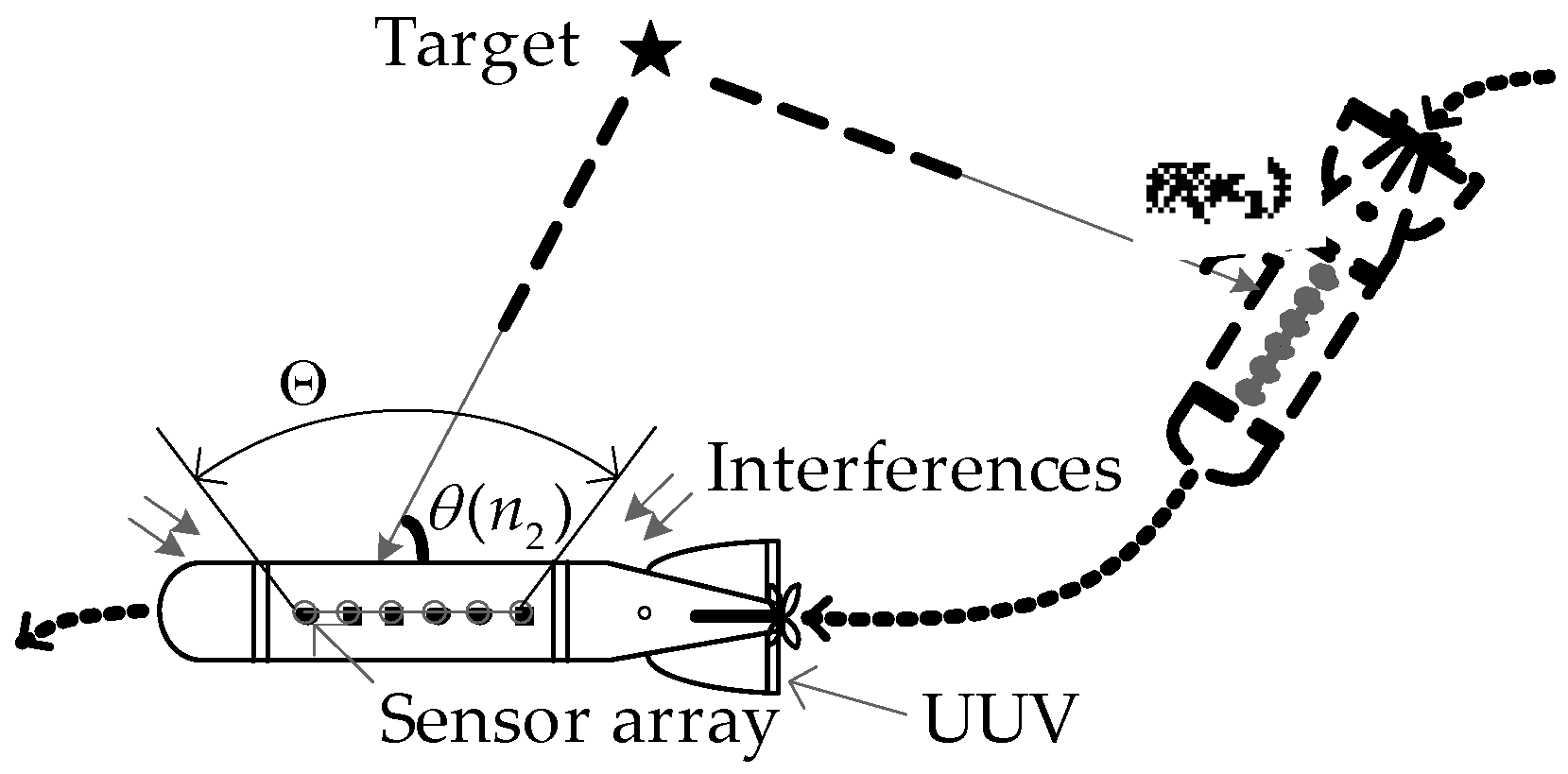
- Target signals: The direction, frequency, amplitude, and number of tones are unknown. The total energy of tones is low, but the SNR per unit bandwidth is high.
- (b)
- Interferences: The interferences are composed of the broadband noise and unknown tonal signals radiated from the local platform, which vary with the working status of the platform.
- (c)
- Unmanned mobile platform: Due to mission requirements, the platform or target often performs rotation, fast maneuvering, etc., which causes the direction-of-arrival (DOA) of target to change rapidly.
2. Array Signal Reception Model
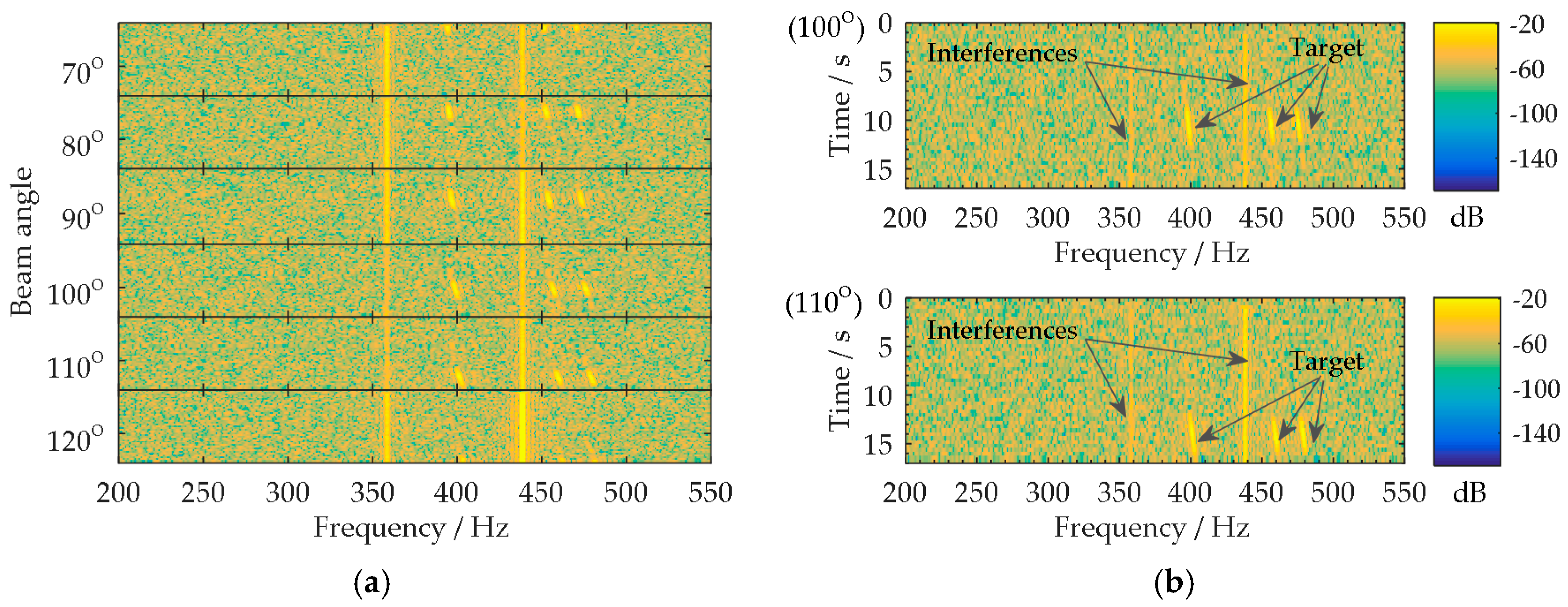
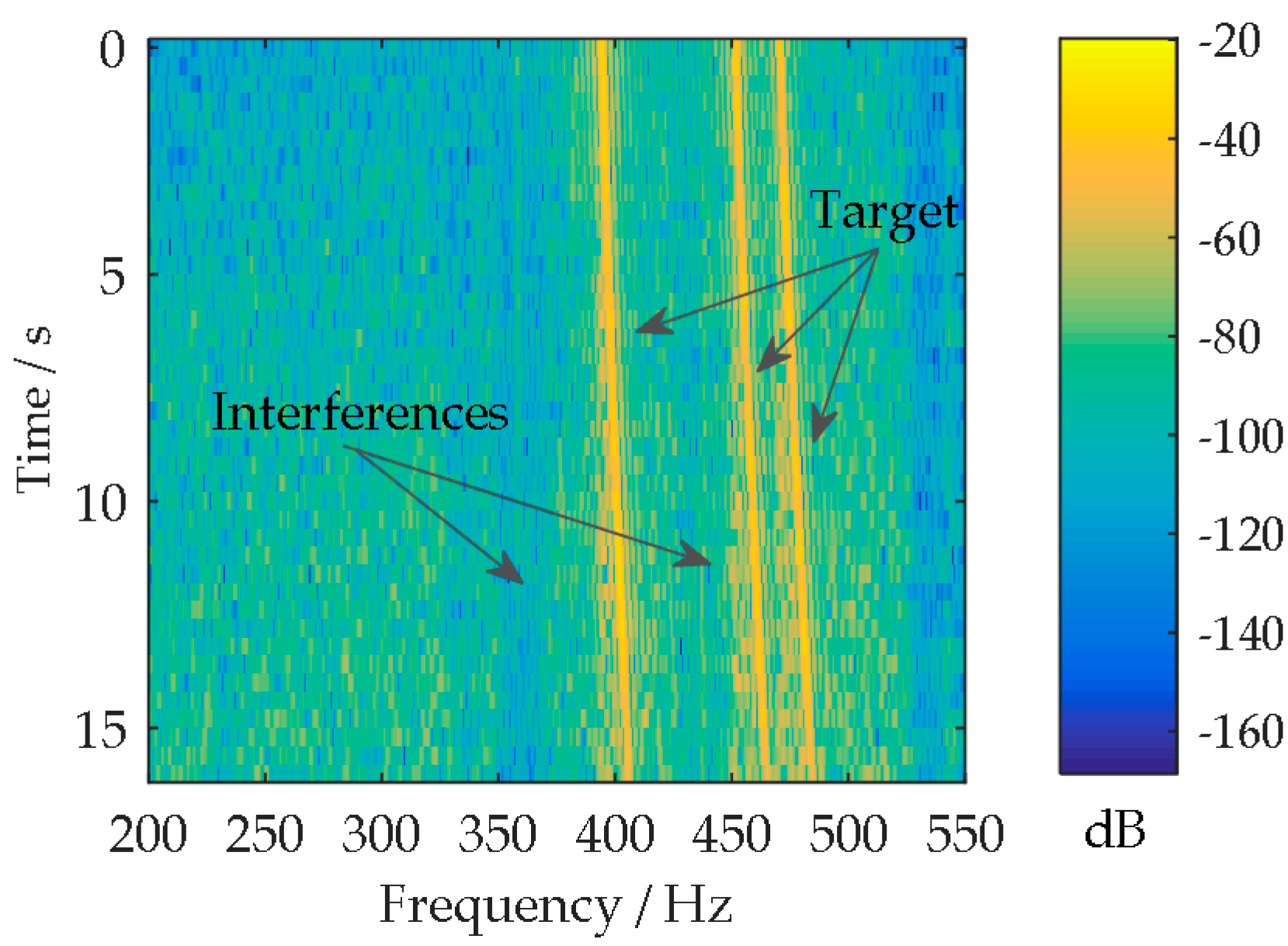
3. Multi-Beam Lofargram
4. Self-Steering Beamforming Technique for Tone Detection
4.1. Beam Self-Steering
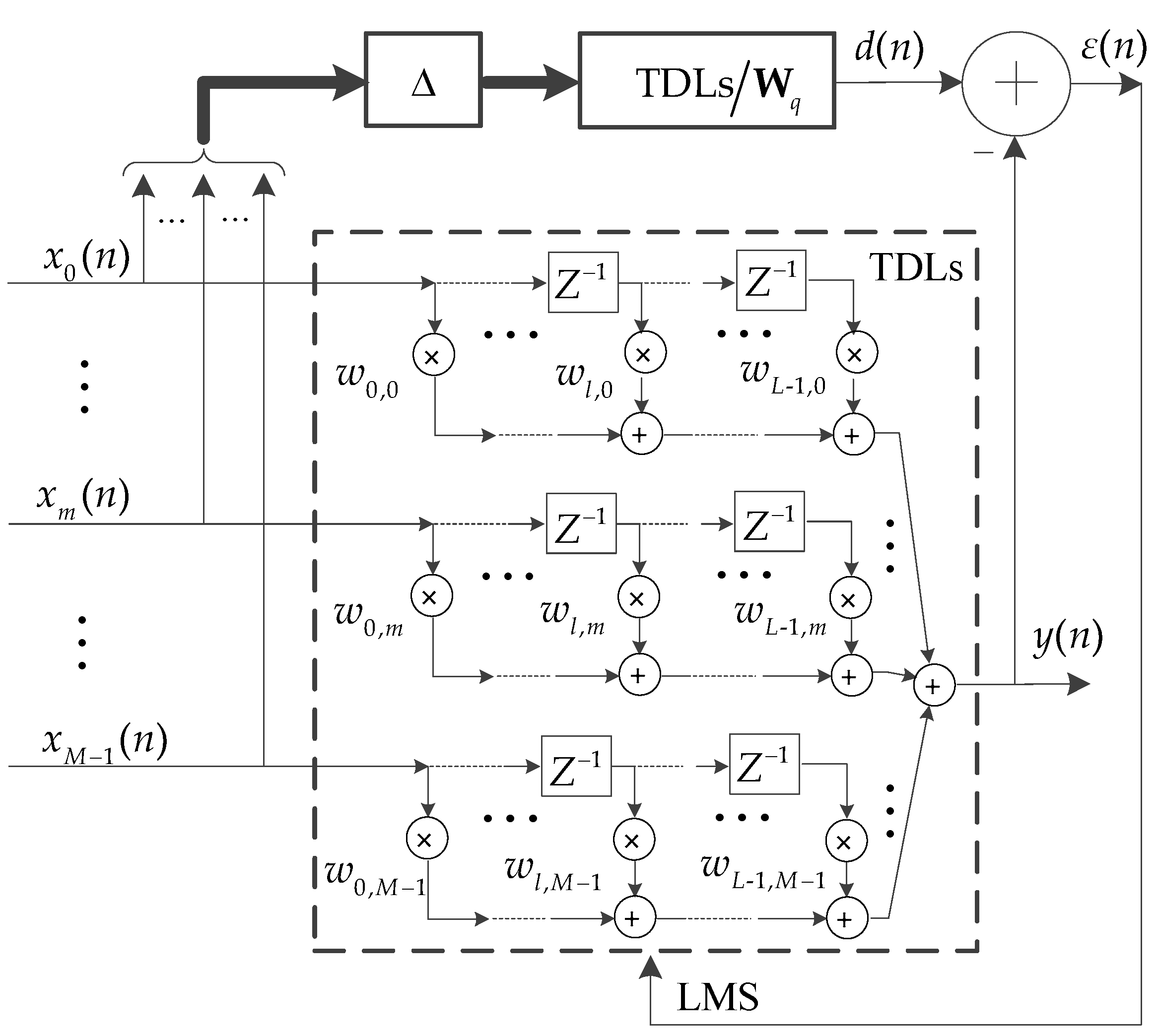
4.1.1. Time-Domain Broadband Beamformer Output
4.1.2. Acquisition of the Reference Signal
4.1.3. Adaptive Adjustment of the Weight Vector
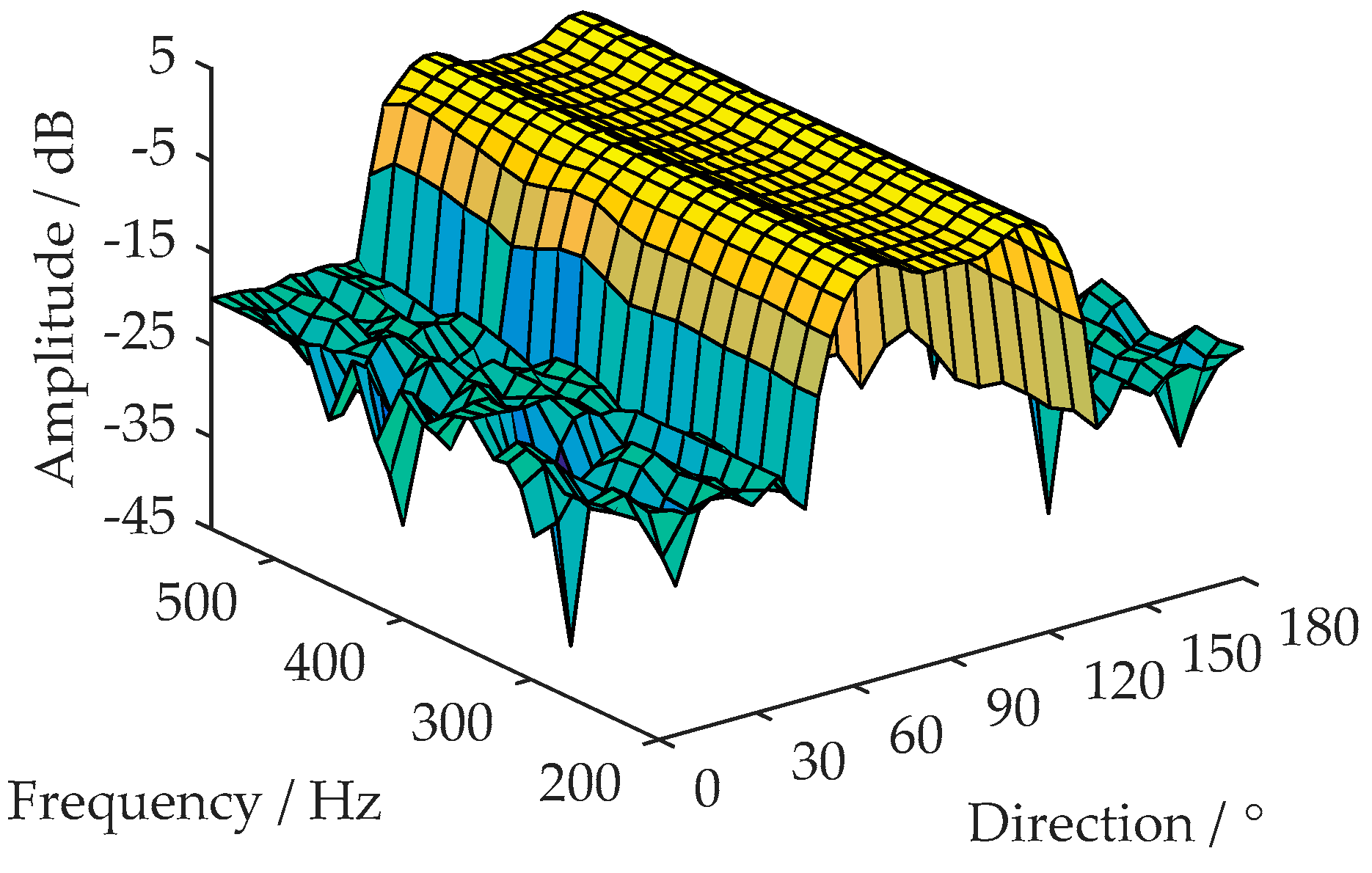
4.1.4. Beam Self-Steering Characteristics Analysis
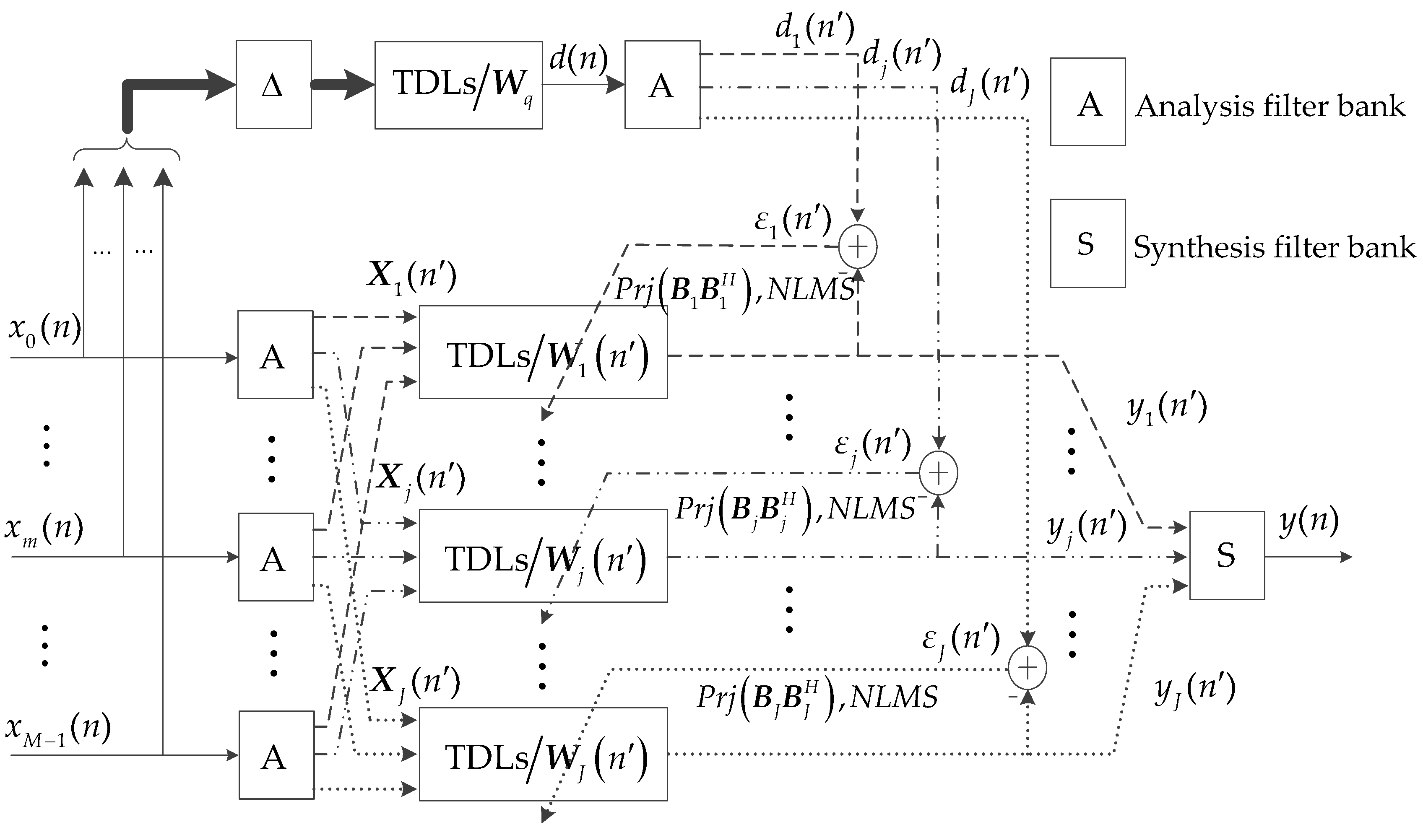
4.2. Interference Suppression and Convergence Rate Improvement
- Initial design: is designed by Equation (7). The sub-band space-time projection matrix is calculated from Equation (19).
- Calculate the target reference signal according to Equation (5).
- and are respectively filtered by the analysis filter bank. The decimated sub-band signals and are obtained.
- Calculate the sub-band beam output and update the by Equation (18).
- The sub-band beam outputs are fused into the beam output by the synthesis filter bank. Repeat the steps 2, 3, 4, 5, until all received signals are processed.
5. Simulations
5.1. Broadband Beam Response Analysis
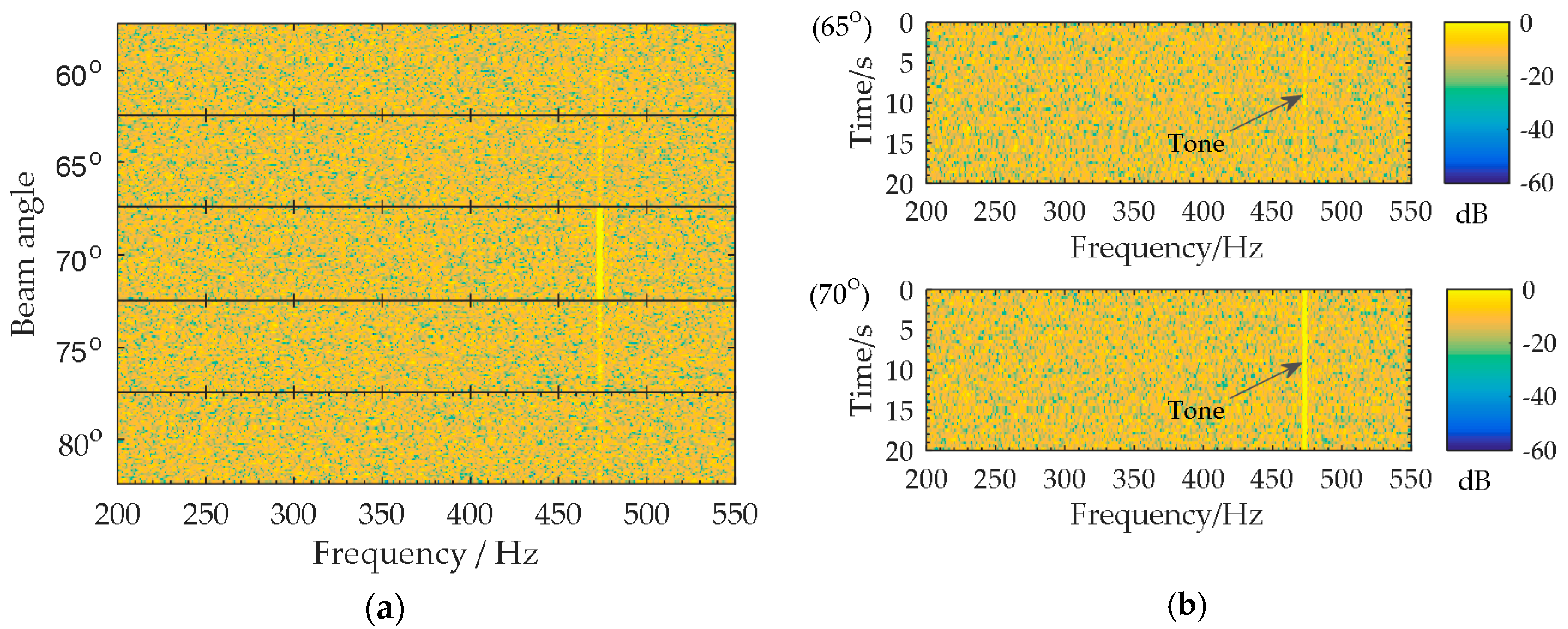
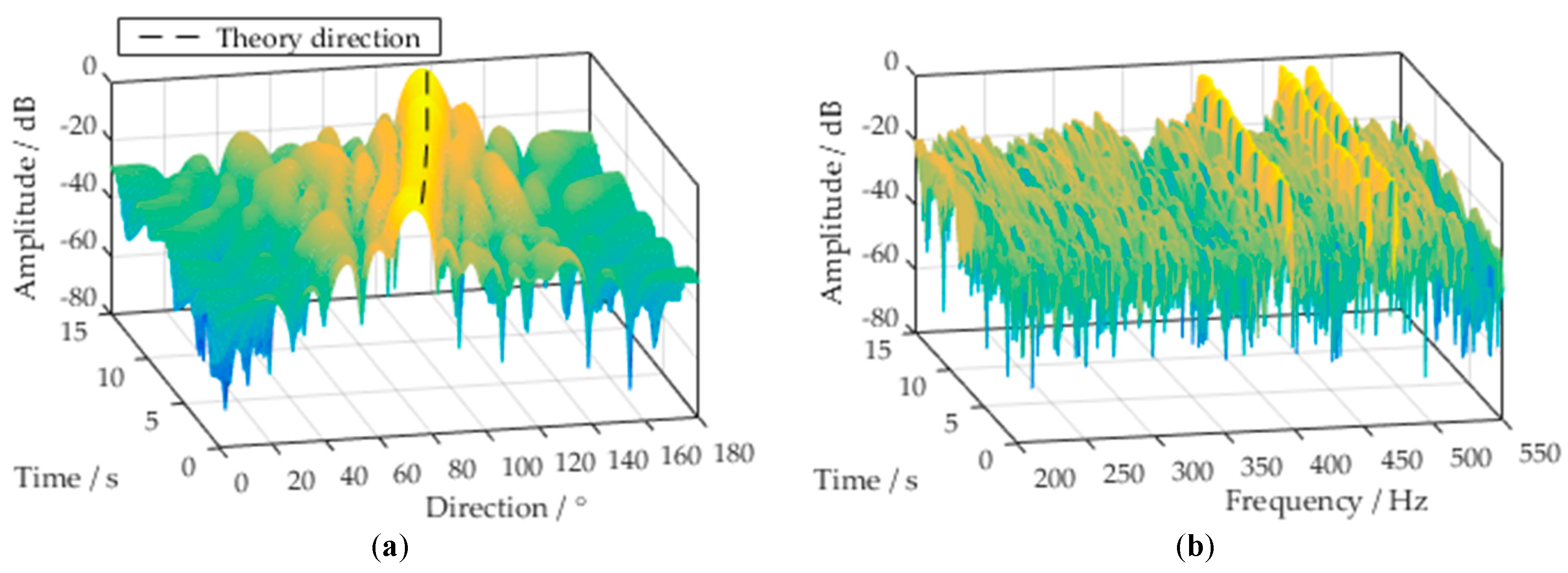
5.2. Lofargram Analysis of the Beam Output
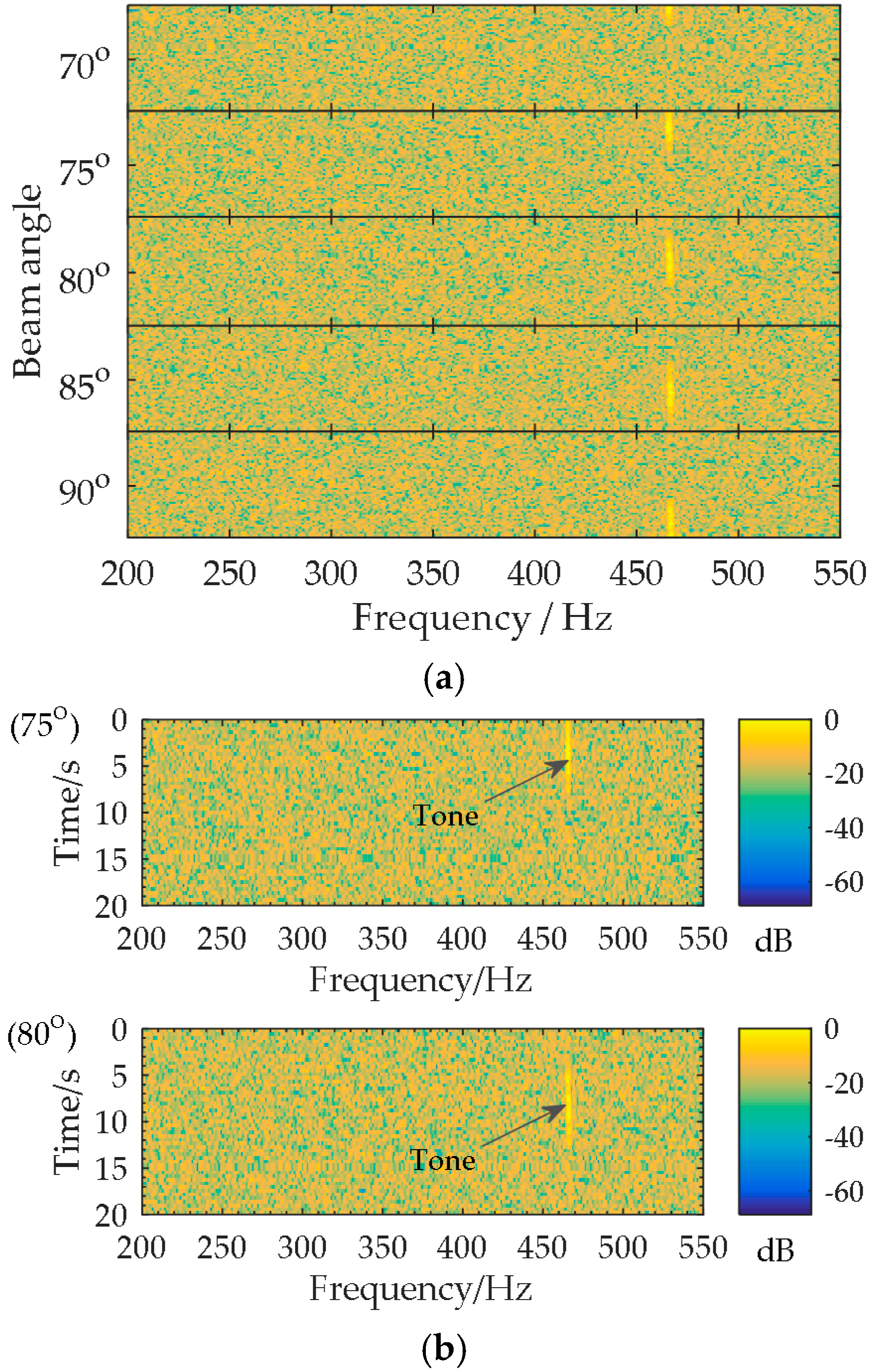
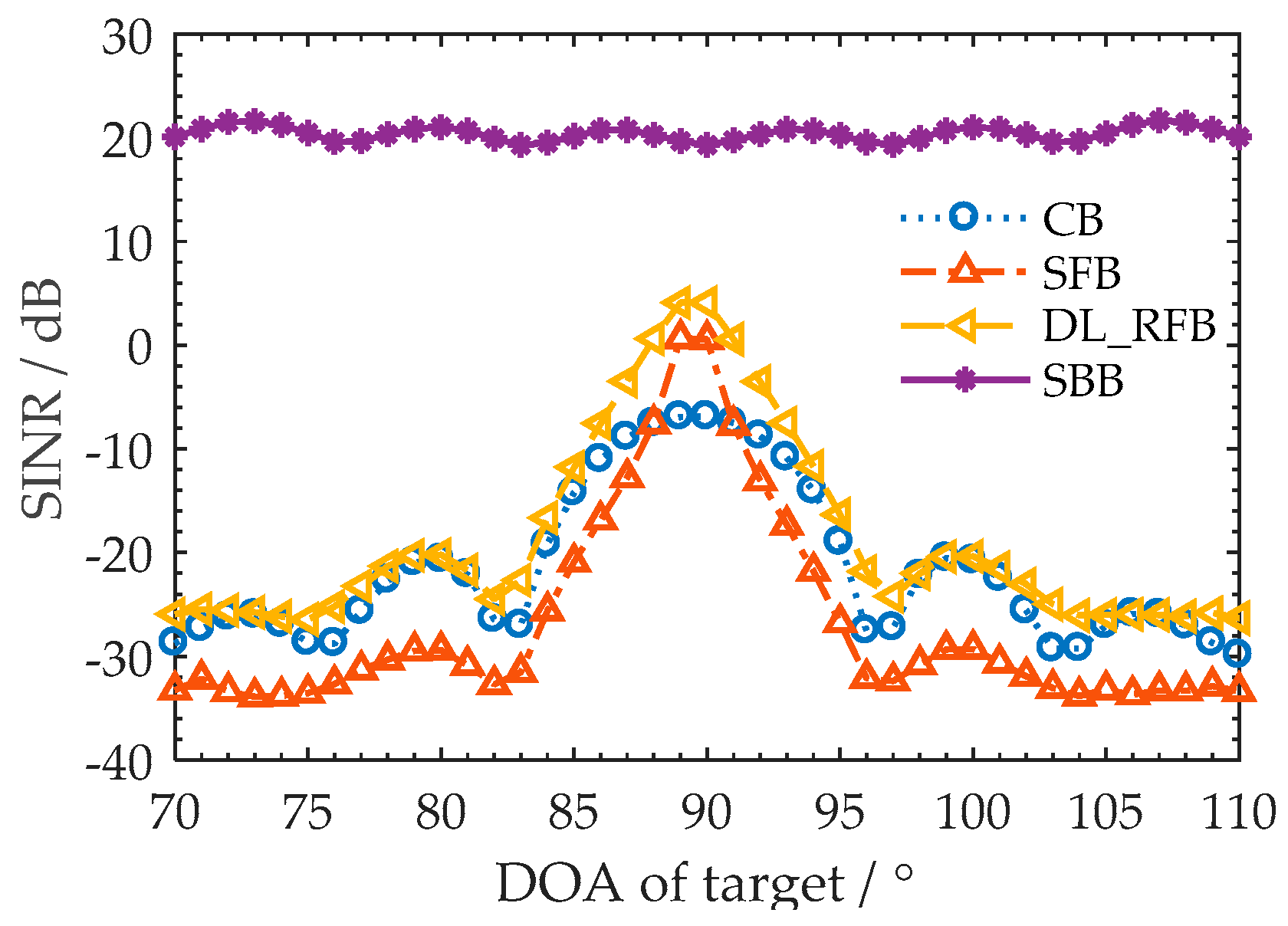
5.3. The Beam Output Performance for Different DOAs of Target
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wittekind, D.K. A Simple model for the underwater noise source level of ships. J. Ship. Prod. Des. 2014, 30, 7–14. [Google Scholar] [CrossRef]
- Sun, J.P.; Yang, J.; Lin, J.H.; Jiang, G.J.; Yi, X.J.; Jiang, P.F. Theoretical model and simulation of ship underwater radiated noise. Acta Phys. Sin. 2016, 65, 151–160. [Google Scholar] [CrossRef]
- Wang, Y.L.; Ma, S.L.; Fan, Z.; Liang, G.L.; Li, Q. Robust DFT-based generalised likelihood ratio test for underwater tone detection. IET Radar Sonar Navig. 2017, 11, 1845–1853. [Google Scholar] [CrossRef]
- Eren, F.; Pe’eri, S.; Thein, M.W.; Rzhanov, Y.; Celikkol, B.; Swift, M.R. Position, orientation and velocity detection of Unmanned Underwater Vehicles (UUVs) using an optical detector array. Sensors 2017, 17, 1741. [Google Scholar] [CrossRef] [PubMed]
- Gafurov, S.A.; Klochkov, E.V. Autonomous unmanned underwater vehicles development tendencies. Procedia Eng. 2015, 106, 141–148. [Google Scholar] [CrossRef]
- Zhang, W.; Su, T. Reference beam pattern design for frequency invariant beamforming based on fast Fourier transform. Sensors 2016, 16, 1554. [Google Scholar] [CrossRef] [PubMed]
- Frost, O.L. An algorithm for linearly constrained adaptive array processing. Proc. IEEE 1972, 60, 926–935. [Google Scholar] [CrossRef]
- Salvati, D.; Drioli, C.; Foresti, G.L. A low-complexity robust beamforming using diagonal unloading for acoustic source localization. IEEE/ACM Trans. Audio Speech Lang. Process. 2018, 26, 609–622. [Google Scholar] [CrossRef]
- Hossain, M.S.; Godara, L.C.; Islam, M.R. Efficient robust broadband beamforming algorithms using variable loading. IEEE Latin Am. Trans. 2012, 10, 1697–1702. [Google Scholar] [CrossRef]
- Ebrahimi, R.; Seydnejad, S.R. Elimination of pre-steering delays in space-time broadband beamforming using frequency domain constraints. IEEE Commun. Lett. 2013, 17, 769–772. [Google Scholar] [CrossRef]
- Wu, K.; Su, T. Design of generalised sidelobe canceller-based adaptive wideband beamformer without pre-steering delays. Electron. Lett. 2016, 52, 177–178. [Google Scholar] [CrossRef]
- Suojoki, T.; Tabus, I. A novel efficient normalization technique for sonar detection. In Proceedings of the 2002 Interntional Symposium on Underwater Technology, Tokyo, Japan, 16–19 April 2002; IEEE: Piscataway Township, NJ, USA, 2002; pp. 296–301. [Google Scholar] [CrossRef]
- Yuan, Y.Y.; Jiang, X.Y.; Du, X.M. Noise normalization technique in multi-beam LOFAR processing. Tech. Acoust. 2012, 31, 300–303. [Google Scholar] [CrossRef]
- Rice, I.; Lowe, D. A decision support system to ease operator overload in multibeam passive sonar. IEEE J. Ocean. Eng. 2018, 43, 1–11. [Google Scholar] [CrossRef]
- Widrow, B.; Glover, J.R.; McCool, J.M.; Kaunitz, J.; Williams, C.S.; Hearn, R.H.; Zeidler, J.R.; Dong, E., Jr.; Goodlin, R.C. Adaptive noise cancelling: Principals and applications. Proc. IEEE 1975, 63, 1692–1716. [Google Scholar] [CrossRef]
- Yan, S.F.; Ma, Y.L.; Hou, C.H. Optimal array pattern synthesis for broadband arrays. J. Acoust. Soc. Am. 2007, 122, 2686–2696. [Google Scholar] [CrossRef] [PubMed]
- Goncalves, M.C.; Petraglia, A. Efficient decimation filter design for lofargram analysis in passive sonar systems. IEEE Trans. Instrum. Meas. 2006, 55, 132–139. [Google Scholar] [CrossRef]
- Li, J.; Han, G.J.; Zhou, D.F.; Tang, K.; Han, Q.B. Target motion parameter estimation for lofargrams based on waveguide invariants. In Underwater Acoustics and Ocean Dynamics, Proceedings of the 4th Pacific Rim Underwater Acoustics Conference, Hangzhou, China, October 2013; Springer: Singapore, 2016; pp. 85–92. [Google Scholar]
- Ma, Y.L.; Zhao, J.W.; Zhang, Q. A method for high precision time delay implementation by a FIR degital filter. Acta Acust. 1995, 20, 121–126. [Google Scholar] [CrossRef]
- Guimaraes, D.A.; Floriano, G.H.F.; Chaves, L.S. A tutorial on the CVX system for modeling and solving convex optimization problems. IEEE Latin Am. Trans. 2015, 13, 1228–1257. [Google Scholar] [CrossRef]
- Zeidler, J.; Satorius, E.; Chabries, D.; Wexler, H. Adaptive enhancement of multiple sinusoids in uncorrelated noise. IEEE Trans. Acoust. Speech Signal Process. 1978, 26, 240–254. [Google Scholar] [CrossRef] [Green Version]
- Tkacenko, A.; Vaidyanathan, P.P. The role of filter banks in sinusoidal frequency estimation. J. Frankl. Inst. 2001, 338, 517–547. [Google Scholar] [CrossRef] [Green Version]
- Jeong, J.J.; Koo, K.; Choi, G.T.; Kim, S.W. A variable step size for normalized subband adaptive filters. IEEE Signal Process. Lett. 2012, 19, 906–909. [Google Scholar] [CrossRef]
- Yoo, J.W.; Shin, J.W.; Park, P.G. A band-dependent variable step-size sign subband adaptive filter. Signal Process. 2014, 104, 407–411. [Google Scholar] [CrossRef]
- Liu, W.; Weiss, S.; Hanzo, L. A subband-selective broadband GSC with cosine-modulated blocking matrix. IEEE Trans. Antenn. Propag. 2004, 52, 813–820. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.Y.; Yi, C.X.; Yang, Z.M. Design perfect reconstruction cosine-modulated filter banks via quadratically constrained quadratic programming and least squares optimization. Signal Process. 2017, 141, 199–203. [Google Scholar] [CrossRef]
- Forster, P.; Vezzosi, G. Application of spheroidal sequences to array processing. In Proceedings of the IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP’87), Dallas, TX, USA, 6–9 April 1987; IEEE: Piscataway Township, NJ, USA, 2003; pp. 2268–2271. [Google Scholar] [CrossRef]
- Darsena, D.; Gelli, G.; Paura, L.; Verde, F. A constrained maximum-SINR NBI-resistant receiver for OFDM systems. IEEE Trans. Signal Process. 2007, 55, 3032–3047. [Google Scholar] [CrossRef]
- Habets, E.A.P.; Benesty, J. A two-stage beamforming approach for noise reduction and dereverberation. IEEE Trans. Audio Speech 2013, 21, 945–958. [Google Scholar] [CrossRef]











© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, S.; Wang, Y.; Zou, N.; Liang, G. A Broadband Beamformer Suitable for UUV to Detect the Tones Radiated from Marine Vessels. Sensors 2018, 18, 2928. https://doi.org/10.3390/s18092928
Ma S, Wang Y, Zou N, Liang G. A Broadband Beamformer Suitable for UUV to Detect the Tones Radiated from Marine Vessels. Sensors. 2018; 18(9):2928. https://doi.org/10.3390/s18092928
Chicago/Turabian StyleMa, Shilong, Yilin Wang, Nan Zou, and Guolong Liang. 2018. "A Broadband Beamformer Suitable for UUV to Detect the Tones Radiated from Marine Vessels" Sensors 18, no. 9: 2928. https://doi.org/10.3390/s18092928
APA StyleMa, S., Wang, Y., Zou, N., & Liang, G. (2018). A Broadband Beamformer Suitable for UUV to Detect the Tones Radiated from Marine Vessels. Sensors, 18(9), 2928. https://doi.org/10.3390/s18092928