6.1. Energy Consumption of Nodes under Different Kinds of Network Partition
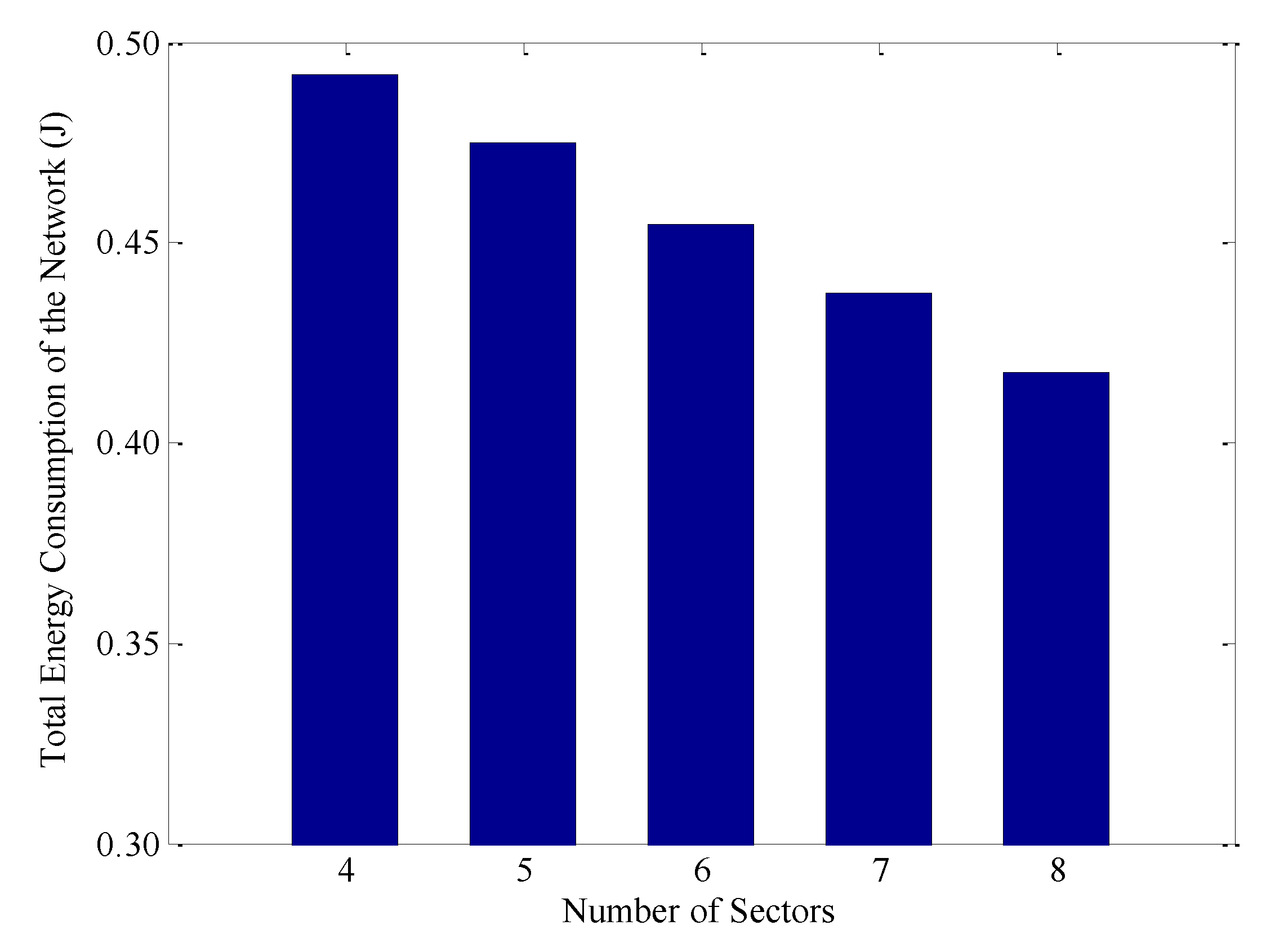
Figure 10 shows the total energy consumption of nodes after a round of data collection under different numbers of sectors. Without loss of generality, the number of annuli is set to 3, that is,
k = 3. Moreover, according to Equation (21), it is not difficult to know that, to ensure that there is at least one node in each RCCH of the outermost annulus, the network can be divided into eight sectors at most, namely
n ≤ 8. Obviously, with the increase of the value of
n, the total energy consumption of the whole network is decreasing. For example, when
n = 8, the energy consumption is 17.8% lower than that at
n = 4. The main reason is that the area of each annulus decreases with the increase of
n, which releases the burden of nodes in the RCCH to some extent and decreases their energy consumption. In addition, the distance between the CN and the CH is also shortened when
n is large. Thus, the energy consumption on single-hop transmission is also effectively reduced.
Then, we keep the network scale unchanged and analyze the total energy consumption under different kinds of network partition methods. The radius of the circular network is set to 240 m, and the total number of nodes in the network is 500. According to Equations (20) and (21), the network can be divided into five annuli at most in order to ensure that there is at least one node in each RCCH. Thus, we adopt three kinds of division, namely,
k = 3 and
n = 8;
k = 4 and
n = 5 and
k = 5 and
n = 4.
Table 5 shows the average number of nodes in each RCCH under these three partition methods as well as the total energy consumption of them in one round of data collection. We can find that the energy consumption is the lowest when
k = 3 and
n = 8, which is respectively 75% and 65% of that in other two modes. It further illustrates the conclusion that “the smaller the annulus-sector is, the lower the total energy consumption will be”. It is worth noting that when the number of annulus-sectors is 20, the energy consumption of the network with
k = 4 and
n = 5 is about 0.0916 J lower than that with
k = 5 and
n = 4. This is because the area of the innermost RCCH of the former is much larger than that of the latter. Thus, more nodes can participate in data transmission. In addition, the fewer the number of annuluses is, the fewer the hops is, that results in lower energy consumption on communication.
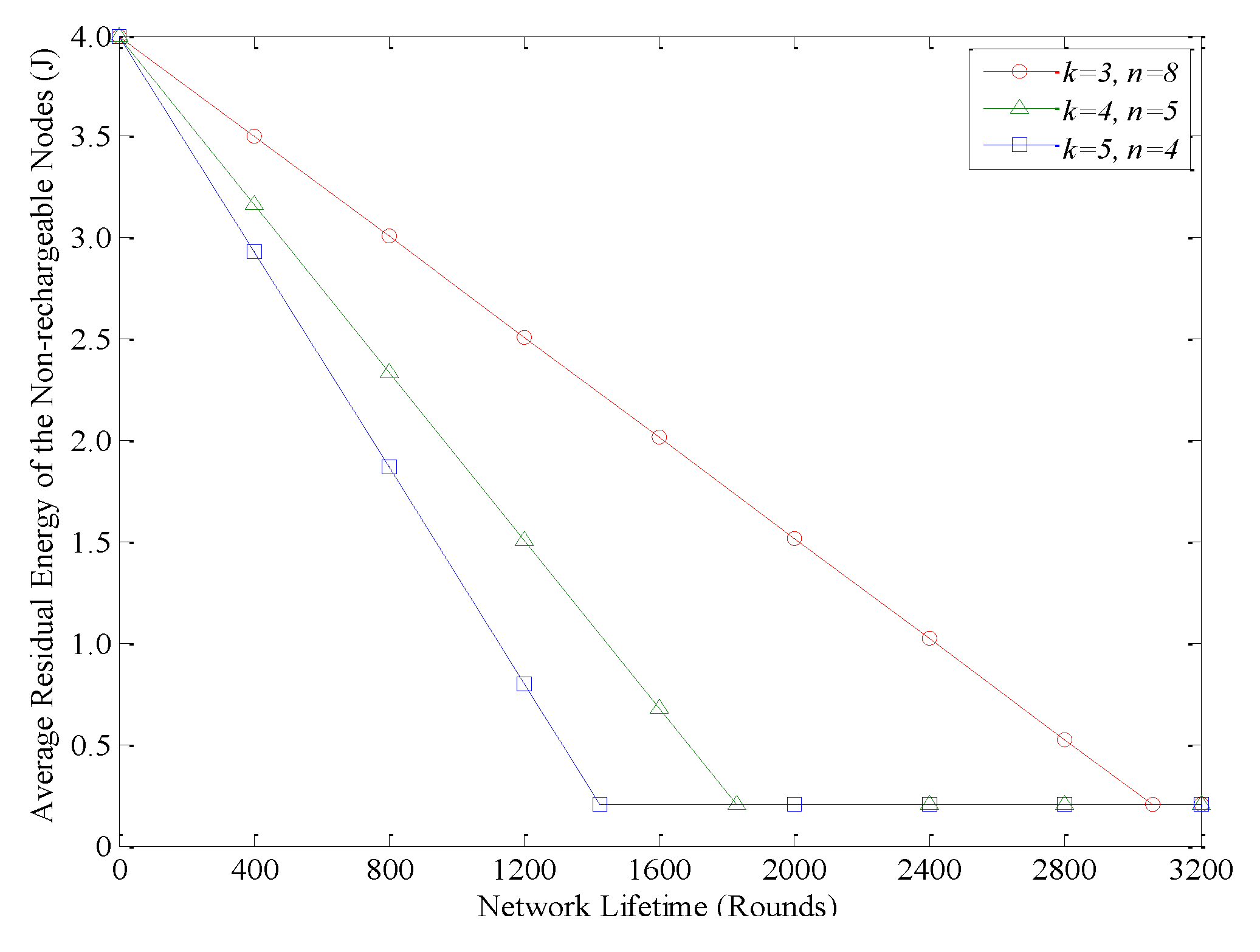
As mentioned above, in AEBDC, the WCV periodically recharges nodes located in the RCCH to ensure their sustainable operation. Compared with other non-rechargeable nodes, those nodes in the outermost annuli have the highest energy consumption rate due to their long single-hop transmission distance. For this reason, we focus on the average residual energy of those nodes, and the result is shown in
Figure 11. When
k = 3 and
n = 8, the performance of this experiment is the best, and the dead nodes only appear after about 3000 rounds. However, in the case of
k = 4,
n = 5 or
k = 5,
n = 4, the dead nodes appear after 1800 or 1400 rounds, respectively.
Table 6 shows the average energy consumption of nodes in each RCCH during a round of data collection. No matter how many annuli are in the network, the energy consumption of nodes in different RCCHs within the same annulus is approximately equal to each other. This is because the cluster head is periodically selected in AEBDC and it also makes full use of the non-cluster heads with high residual energy and low load to forward data collaboratively. This effectively balances the energy consumption of nodes near the center of each annulus-sector. It is worth noting that in
Table 6, the energy consumption balance at
k = 3 is slightly worse than that at
k = 4 or
k = 5. The reason is that when the network is divided into three annuli, according to Equation (17), the area of RCCHs in the second and the third annulus are almost the same. Due to the uniform distribution of nodes, the number of nodes in these RCCHs are almost the same. However, the load on the nodes in the second annulus is heavier than those in the third annulus, thus, there is a certain difference in their energy consumption.
6.2. The Recharging Efficiency under Different Kinds of Network Partition
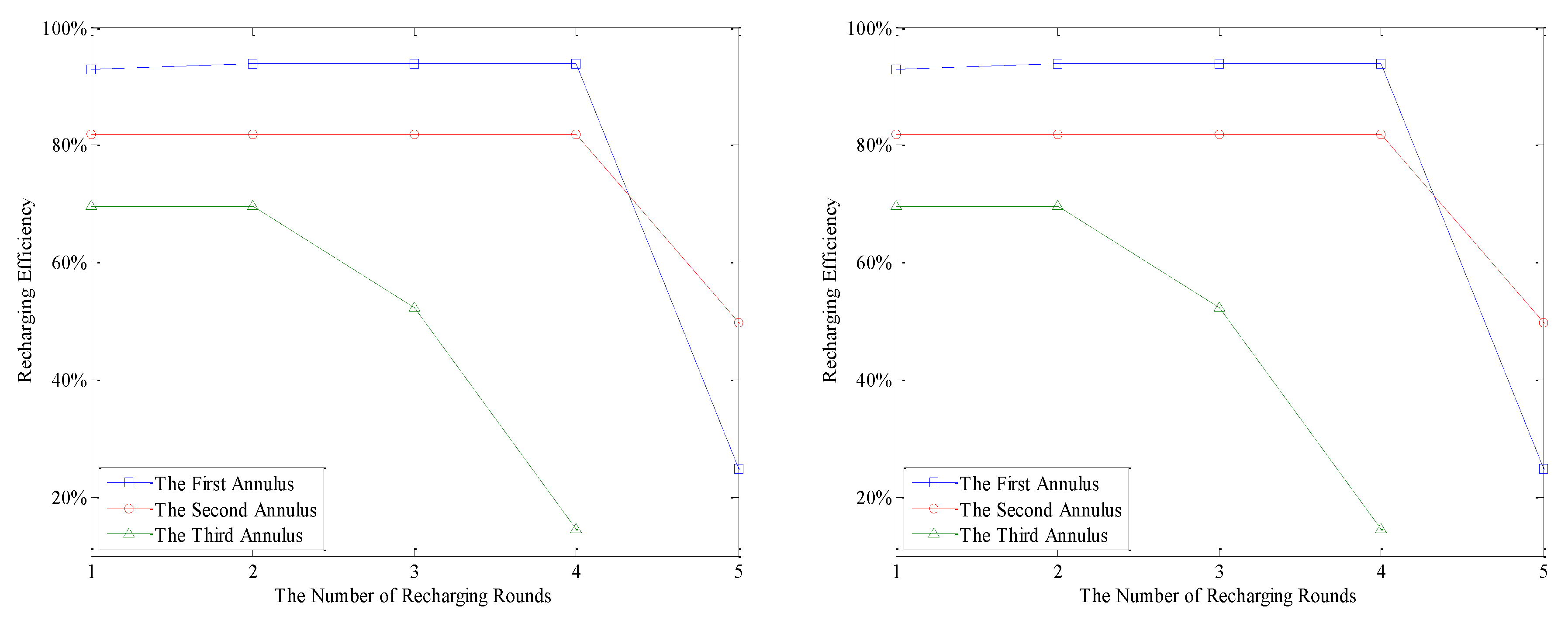
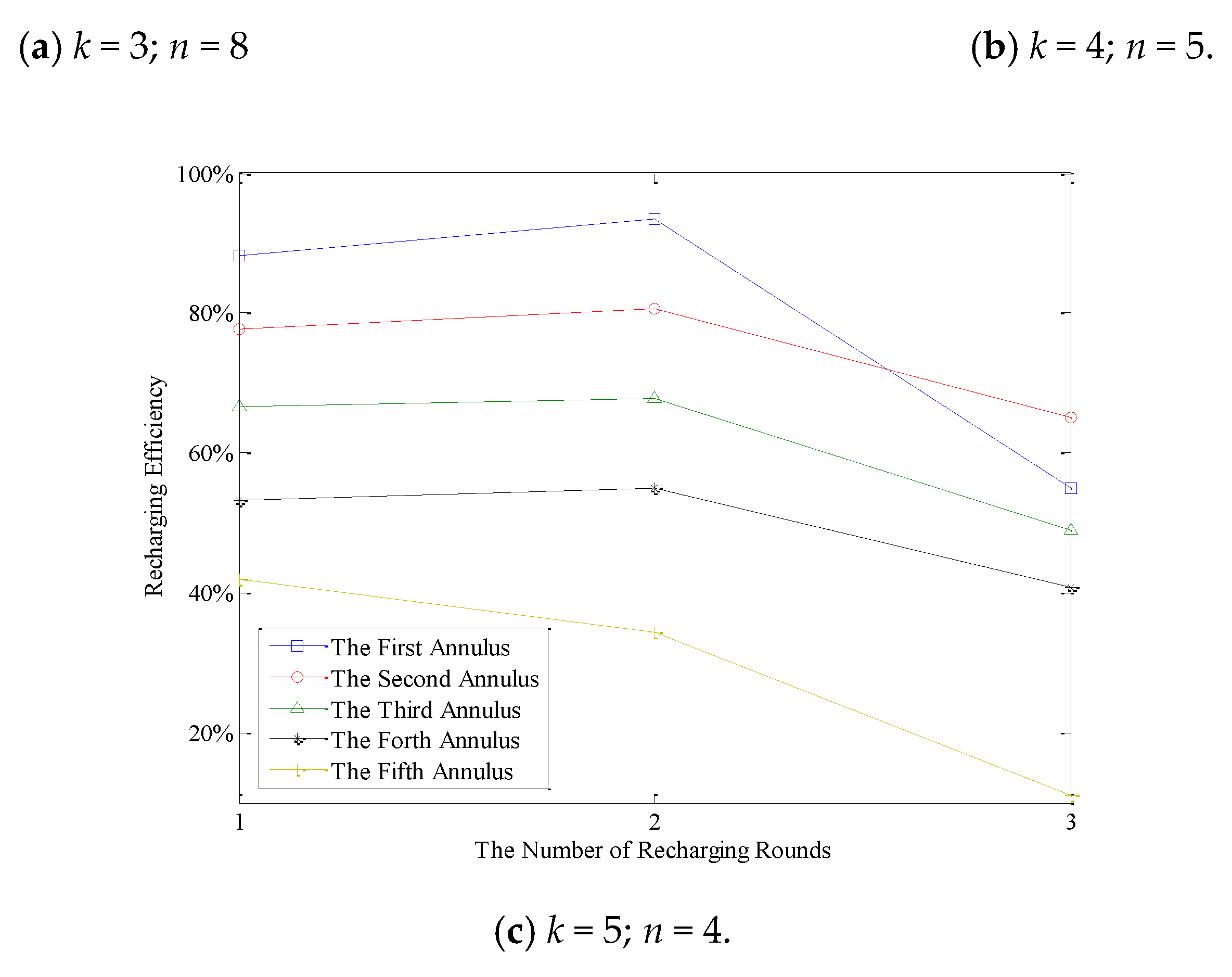
In AEBDC, the “recharging efficiency” is defined as the ratio between the total amount of energy recharged for nodes in a round of recharging and the battery capacity of WCV. From
Figure 12, it is not difficult to see that no matter what the value of
n and
k is, the recharging efficiency of WCV in each annulus is relatively high except for the last one or two rounds. For example, in the case of
k = 3 and
n = 8, the recharging efficiency of WCV in the innermost annulus is still higher than 90% during the first three recharging cycles. In this case, the energy consumption rates of nodes in each RCCH are basically stable, so the most appropriate recharging request thresholds of them can be accurately calculated out by Equations (31)–(34). Furthermore, according to Equations (37), (39) and (40), the total amount of energy recharged for nodes in each RCCH during a round of recharging can also be calculated. Therefore, the energy that the WCV carries before each recharging is made full use of.
It can also be found from
Figure 12 that the closer the WCV is to the center of the network, the higher recharging efficiency it has, regardless of the network partition modes. In this case, the moving path of the WCV is shorter than those of the other annuluses, so the energy consumption on moving is lower. Furthermore, the RCCHs that close to the center of the network consume more energy, so the amount of energy recharged for nodes is also slightly higher. It can also be found in this figure that, the recharging efficiency of the last two rounds decreases greatly. As mentioned before, in AEBDC, the moment when the first dead node appears in the outermost annulus is regarded as the end of the network lifetime. Therefore, in order to avoid energy waste, all nodes are do not need to be fully recharged in the last one or two rounds. The detailed recharging strategy has been described in
Section 5.4.
It should be pointed out that we try to make the values of the various parameters in this paper as close as possible to that in the real scene. As is known to all, the development of current wireless recharging technology is still at an initial stage and the recharging rate is relatively slow. Therefore, there are not many recharging cycles during the simulation process.
Table 7 shows the total recharging efficiency and WCV’s energy distribution under the three kinds of network partition modes. It can be seen that when
k = 3 and
n = 8, the total recharging efficiency of WCV is the highest, while in other two cases, there is little difference between the total recharging efficiency.
6.3. Comparison of Network Lifetime
In this subsection, we compare our method with EBCAG and EBCH. In AEBDC, the network is divided into several virtual concentric annuluses with the same width, which is the same as EBCAG and EBCH. The nodes are organized into uneven clusters in these three methods for balance of energy consumption.
It is worth mentioning that in AEBDC, we use wireless charging technology, which is not adopted in EBCAG and EBCH. At present, in most wireless sensor network recharging strategies, it is regarded that all the nodes are rechargeable. So, the purpose of this kind of recharging schemes is to make the network run stably for a long time, and even there will never be dead nodes. However, the cost of recharging has not been fully taken into account, and some researchers even regard that the nodes can continuously obtain energy. This is obviously not practical. In AEBDC, we mainly focus on energy balance technology in Wireless Sensor Networks. The recharging strategy is only one of the means to improve the energy balance of the whole network. Thus, in the proposed algorithm, the cost on recharging and some other problems (such as the slow recharging speed, the low recharging efficiency, etc.) are fully considered. Only the cluster headers and the candidate cluster headers can be recharged, which keeps their residual energy at the same level as that of the common nodes. Therefore, we do not compare the proposed method with other wireless recharging methods.
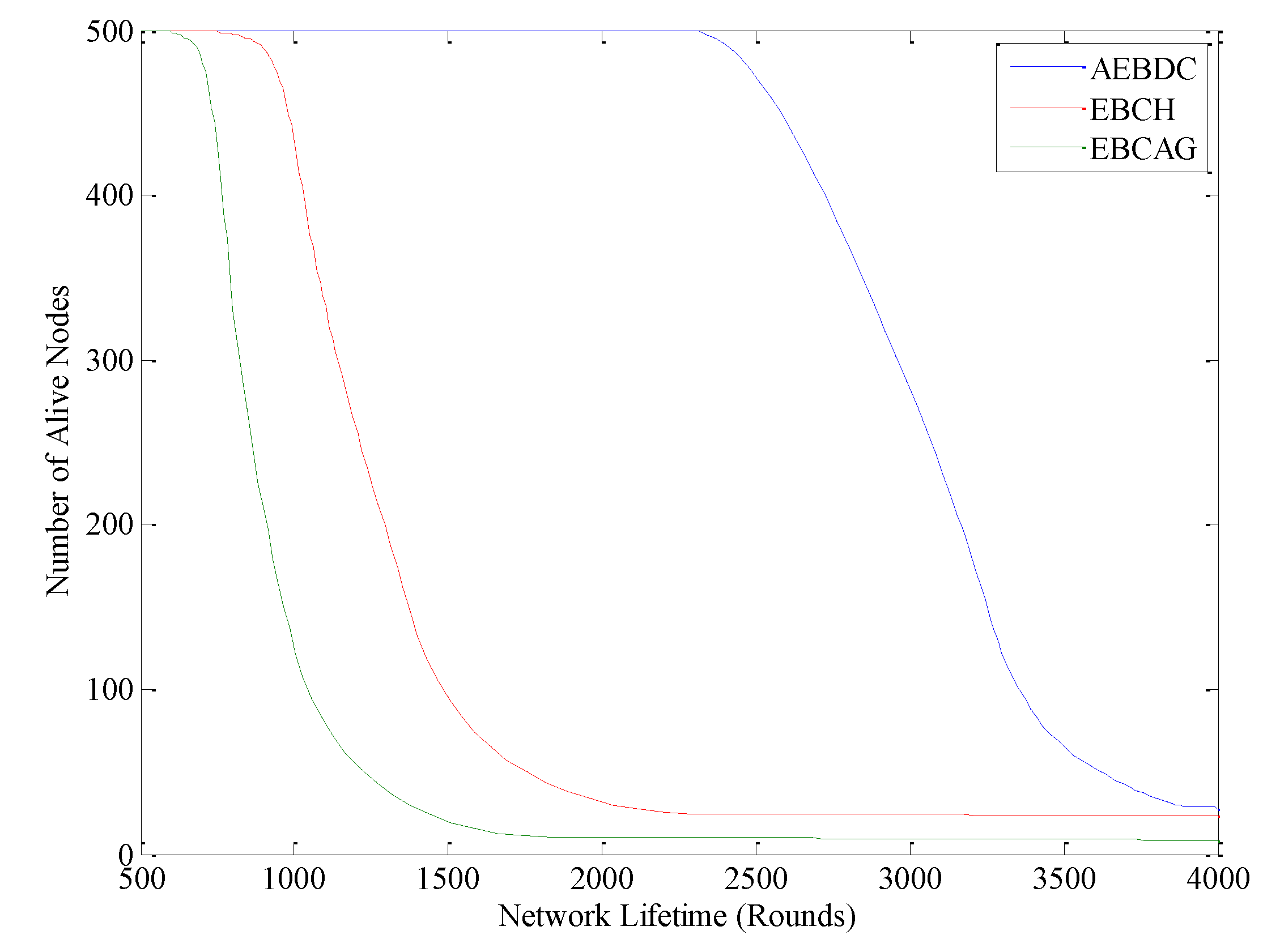
Figure 13 shows the comparison of the number of alive nodes among EBCH, EBCAG and AEBDC. It is easy to see that, the performance of EBCAG is the worst. The dead nodes begin to appear after about 800 rounds, and a large number of nodes die after about 1500 rounds. However, in EBCH, it is not until at around 1100 rounds that the dead nodes appear, and the network lifetime ends at around 2000 rounds, which shows better performance than EBCAG. With the help of the non-uniform deployment of nodes and the optimal load distribution strategy for the cluster headers, an approximate balance of energy consumption among CHs in the same annulus is realized in EBCH, so the network lifetime of this data collection method is prolonged to a certain extent. However, in EBCH, once the CHs die, other nodes will also die quickly, and thus the network lifetime will rapidly decrease. While in AEBDC, the network is divided into different sizes of annulus-sectors. Then, according to the amount of data that nodes need to send and receive in each annulus-sector, we calculate out the size of each RCCH to balance the network load. At the same time, the collaboration based multiple-hop data forwarding strategy is adopted in each annulus-sector to further reduce the energy consumption of the CHs. With the running of the network, the energy consumption rate of the CHs becomes lower and lower in AEBDC so that the number of alive nods of it decreases slower than that of EBCH and EBCAG, as shown in
Figure 13. That is to say, the energy balance performance of AEBDC is better than other methods.
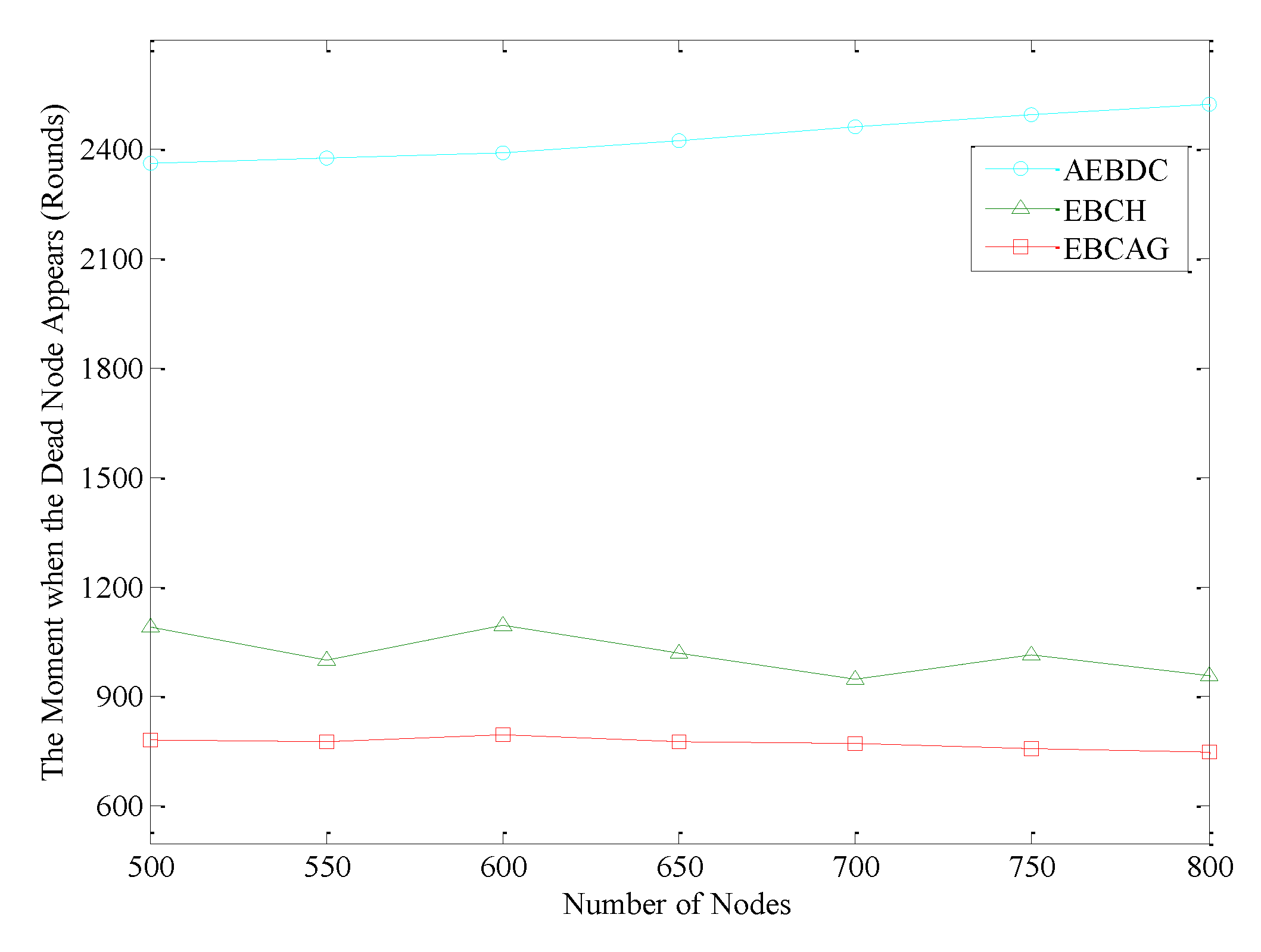
The time when the first node dies is shown in
Figure 14. It is easy to see that in EBCAG, no matter how many nodes are deployed in the network, the moment when the first dead node appears is almost unchanged (at about the 800-th round). The reason is that the optimal radius of the cluster is calculated which minimizes the energy consumption of the whole network. When the total number of nodes increases, the length of radius of each cluster decreases accordingly to maintain the number of nodes within the cluster unchanged essentially. Therefore, the energy consumption of the CHs in EBCAG does not change too much. For EBCH, when the first node dies, the number of data gathering cycles fluctuates to a certain extent with the increase of the number of nodes, and it appears to decrease slightly as a whole. The reason for this tendency is that the number of nodes in each cluster will increase when there are more and more nodes in the network, which enhances the workload of CH. Thus, as the energy consumption of CH increases, the moment when the first dead node appears is ahead of time. That is to say, EBCH is not suitable for the densely deployed network. In AEBDC, although the network load becomes heavier and heavier with the increase of the total number of nodes, the number of nodes in the RCCH increases accordingly. This ensures that more nodes can participate in competing for becoming the cluster header. This effectively balances the energy consumption of each RCCH. Therefore, in AEBDC, the time when the first dead node appears is postponed as the number of nodes increases. In other words, the data collection method proposed in this paper can be applied to various types of networks.
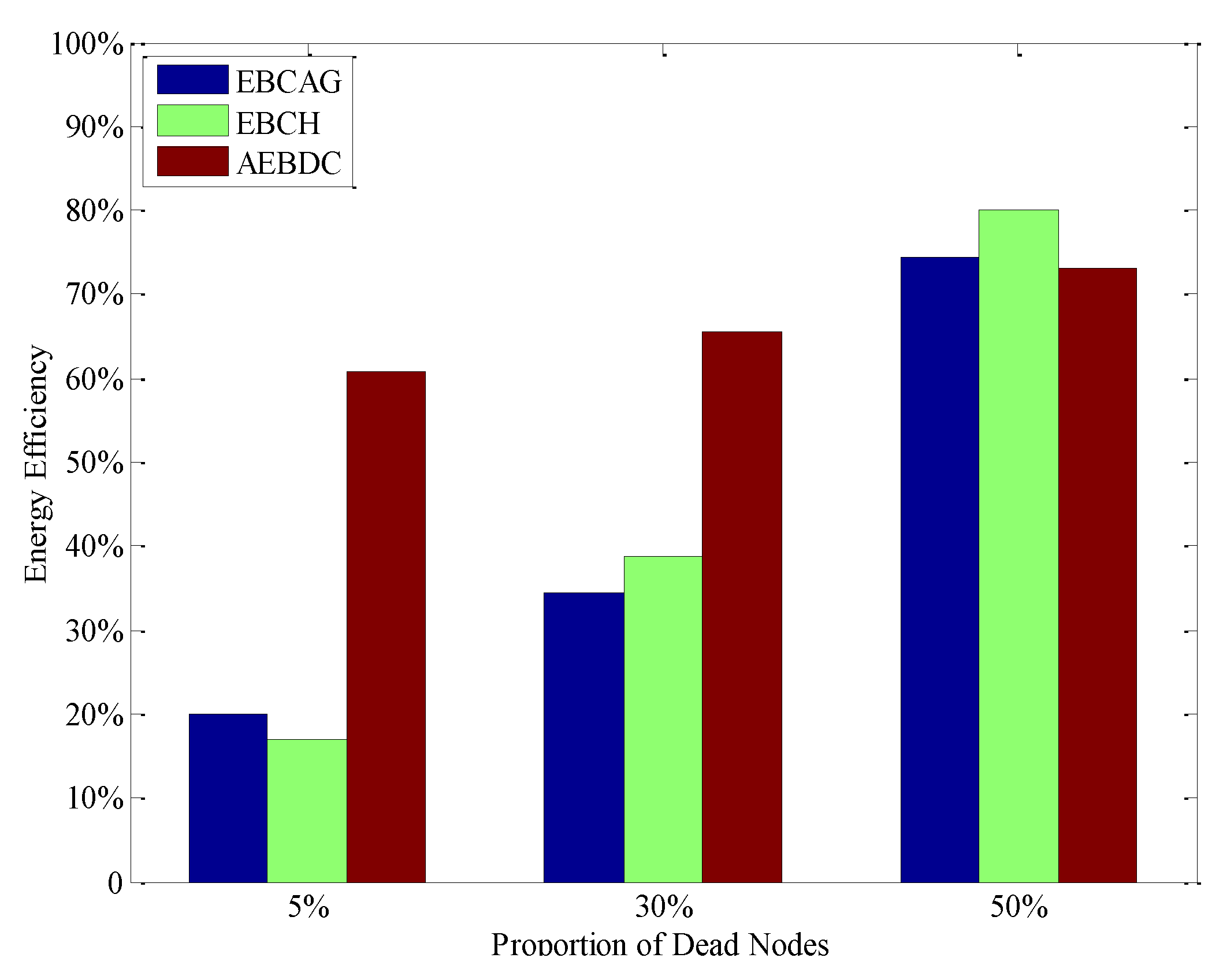
It is worth mentioning that, in AEBDC, there are a few WCVs in the network to periodically recharge the nodes in each RCCH, and the actual available energy of nodes in AEBDC is greater than that in EBCAG and EBCH. Thus, the “energy efficiency” of the three methods are further analyzed, as shown in
Figure 15.
Here, the “energy efficiency” is defined as the ratio between all nodes’ energy consumption and the sum of their initial energy as well as the energy supplied for them. From the simulation result, it is known that the energy efficiency of AEBDC is much higher than that of EBCH and EBCAG when 5% or 30% of nodes die. Although the difference in energy consumption between the CNs and the CHs is reduced due to the cluster-header rotation strategy of EBCAG, it still consumes a lot of energy on calculating the optimal cluster radius as well as reclustering. On the other hand, the EBCH method adopts the local CH rotation scheme as well as the non-uniform deployment strategy to balance the energy consumption of CHs in each annulus. It reduces the expense on CH rotation, but there is still a large difference in energy consumption between cluster heads and non-cluster heads. Thus, the energy efficiency of EBCH is also lower than that of AEBDC. Moreover, the energy consumption of CCHs is approximately balanced in each round of data gathering time in our method, and the recharging scheme also ensures that the CCHs keep working before some common nodes die, which makes full use of energy.
When 50% of nodes die, the energy efficiency of AEBDC is a little lower than the other two algorithms. This is because in AEBDC most of these dead nodes are common nodes and they are located in the outer annuluses. In this case, the energy consumption of CHs in the inner annuluses for forwarding data is great decreased. On the contrary, in EBCH and EBCAG, most of the CHs near the sink exhaust their energy in advance of the common nodes. Thus, the work load on the alive CHs becomes heavier, which increases its energy efficiency to a certain extent.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}