Robust Step Counting for Inertial Navigation with Mobile Phones

 ,
,
Abstract
:1. Introduction
2. State of the Art
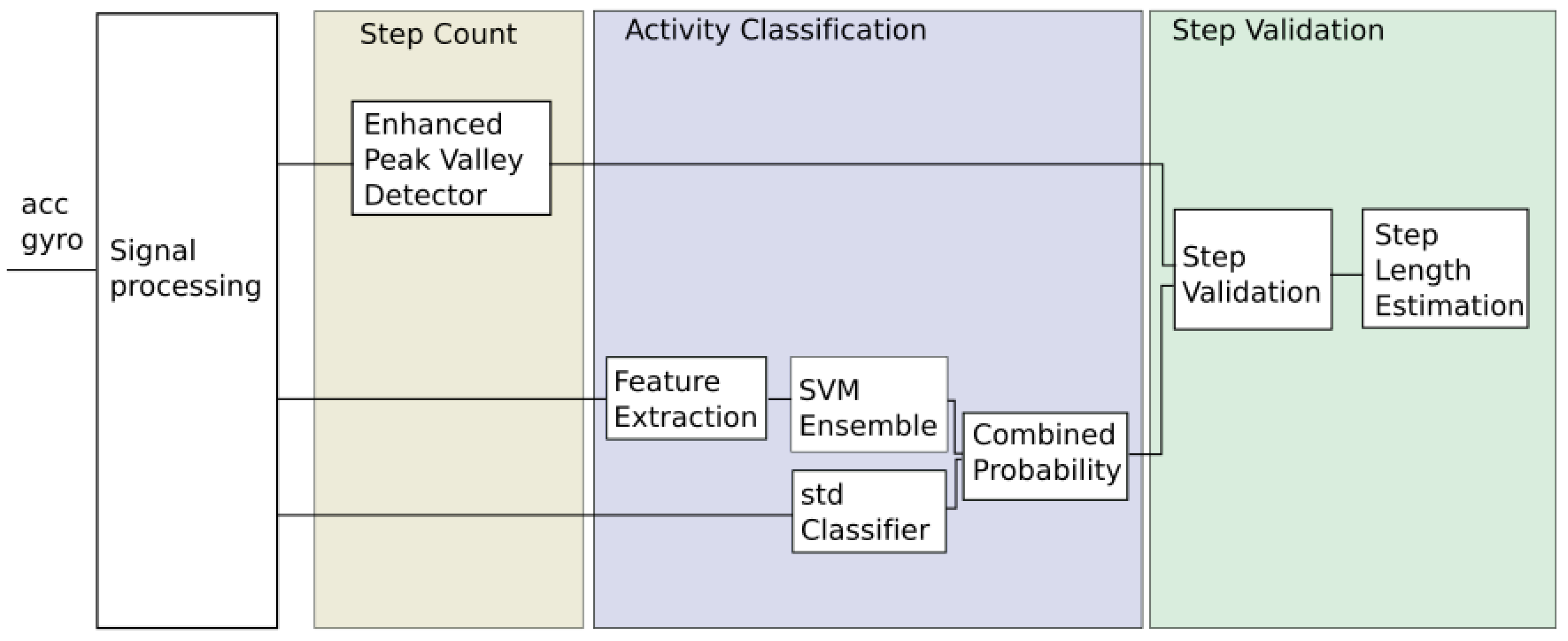
3. Walking Detection and Step Counting
3.1. Raw Signal Processing
3.1.1. Attitude Estimation
3.1.2. Estimation of the Vertical Linear Acceleration
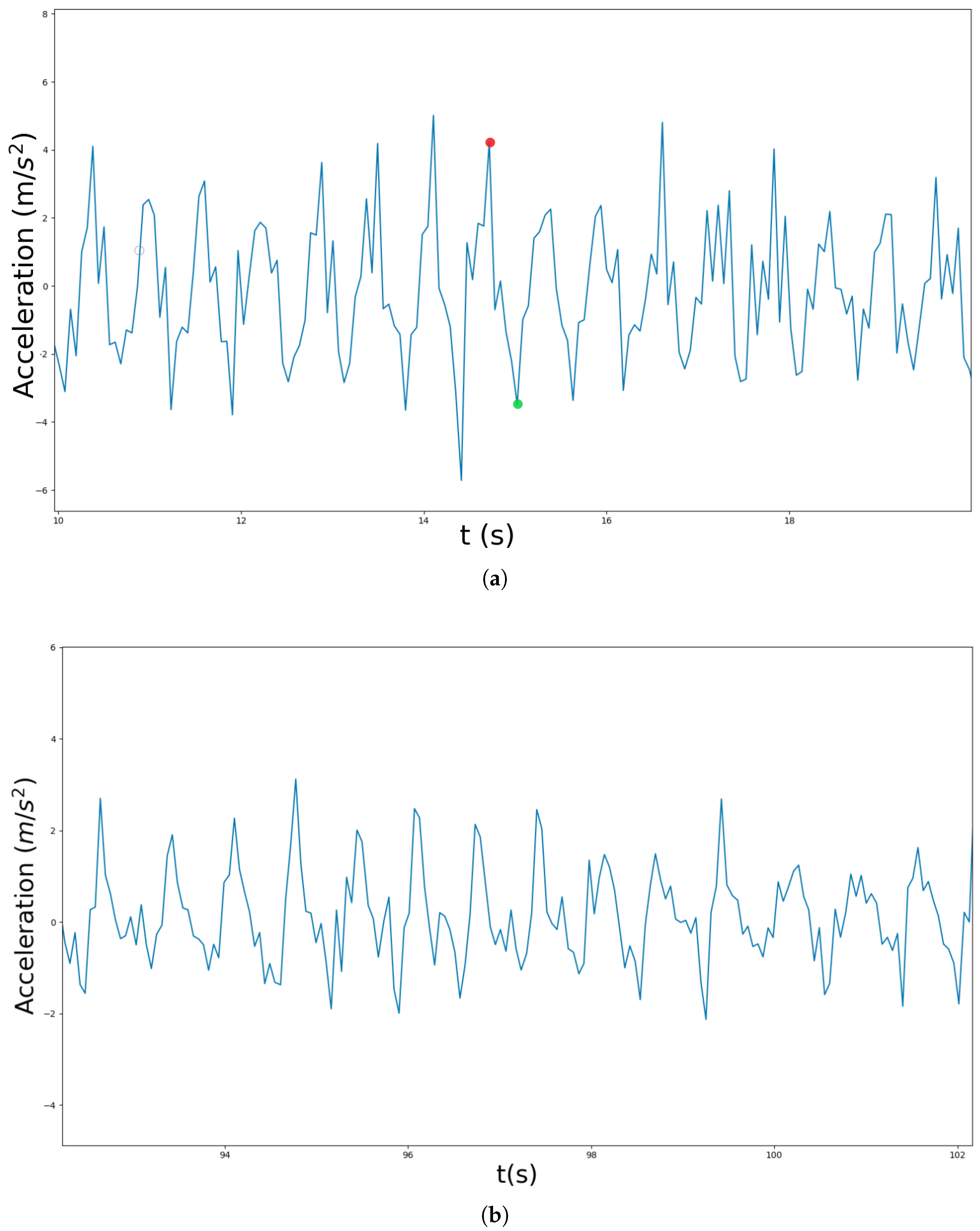
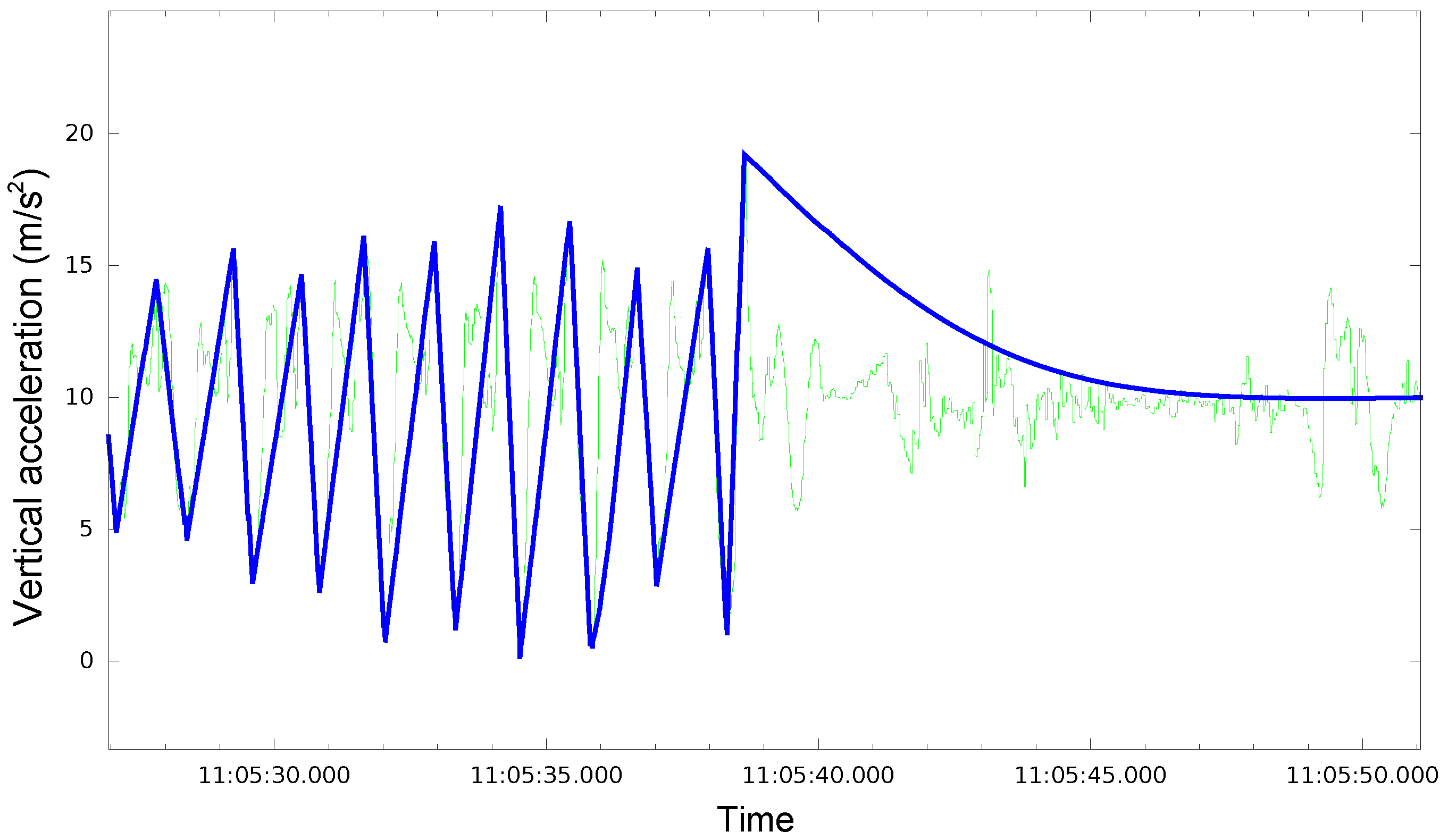
3.1.3. Signal Characteristics
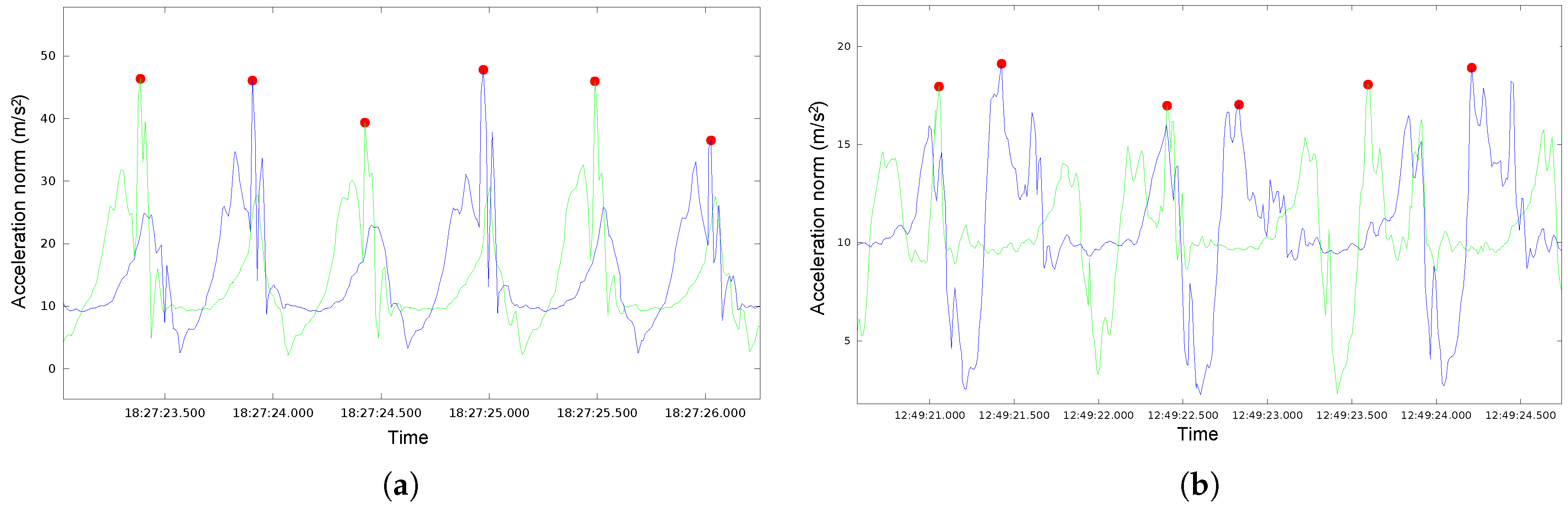
3.2. Step Detection
3.3. Walking Recognition
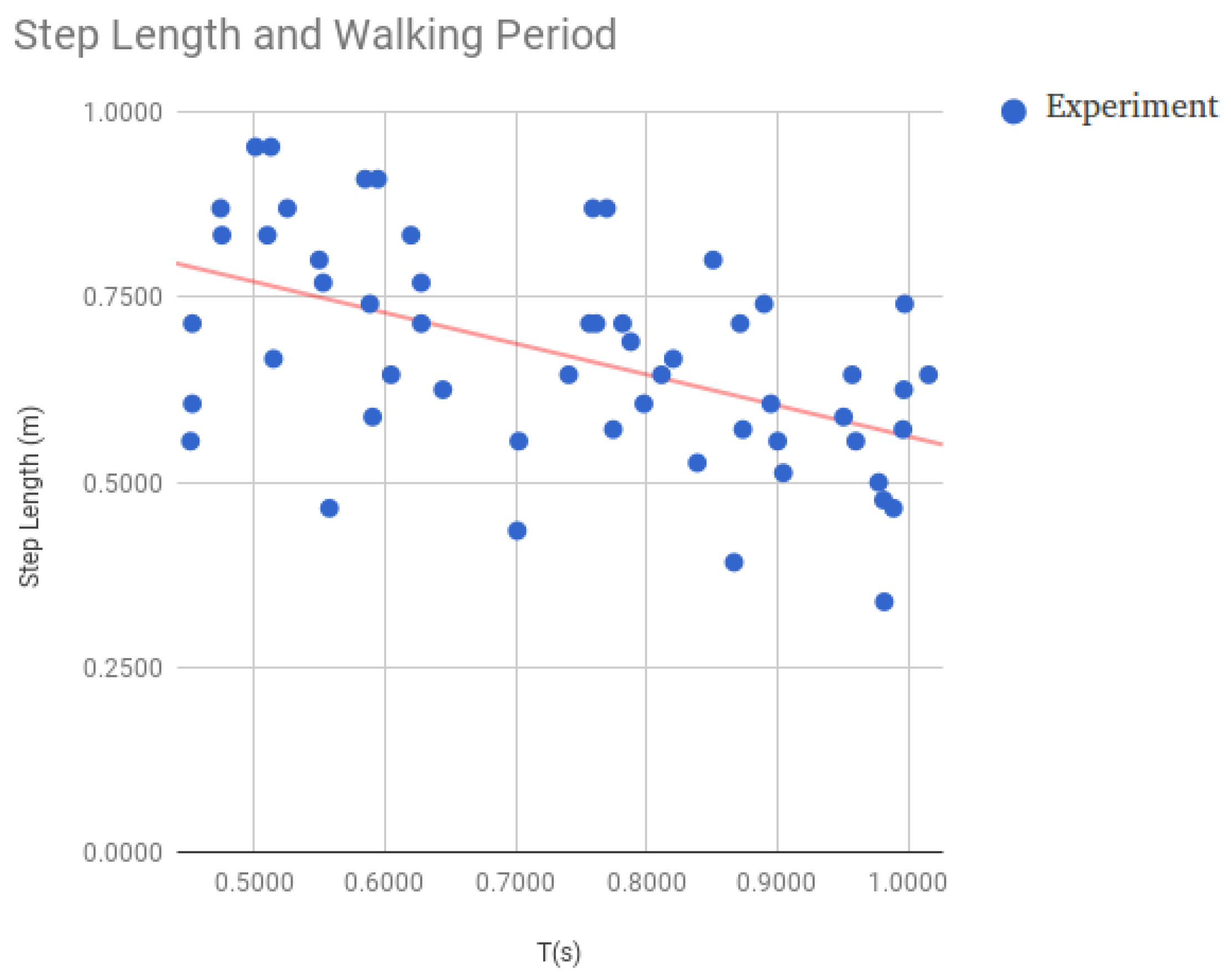
3.4. Estimation of the Distance Traveled by the User
4. Experimental Analysis and Results
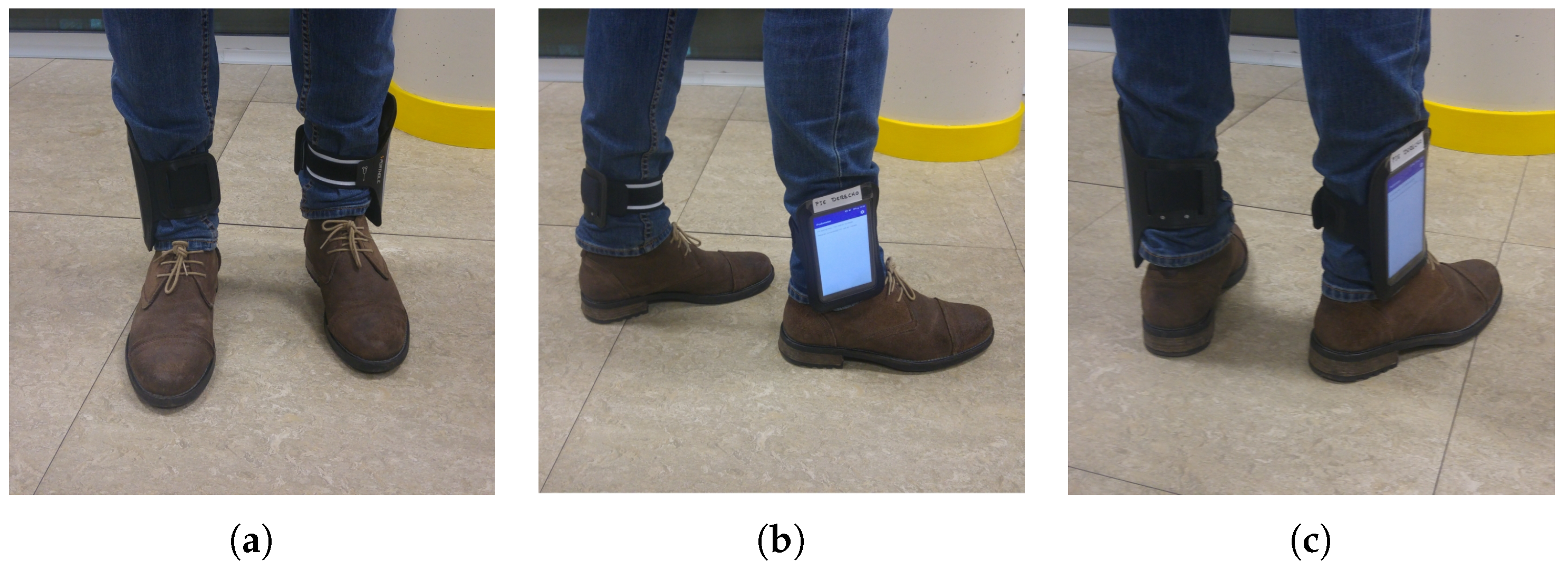
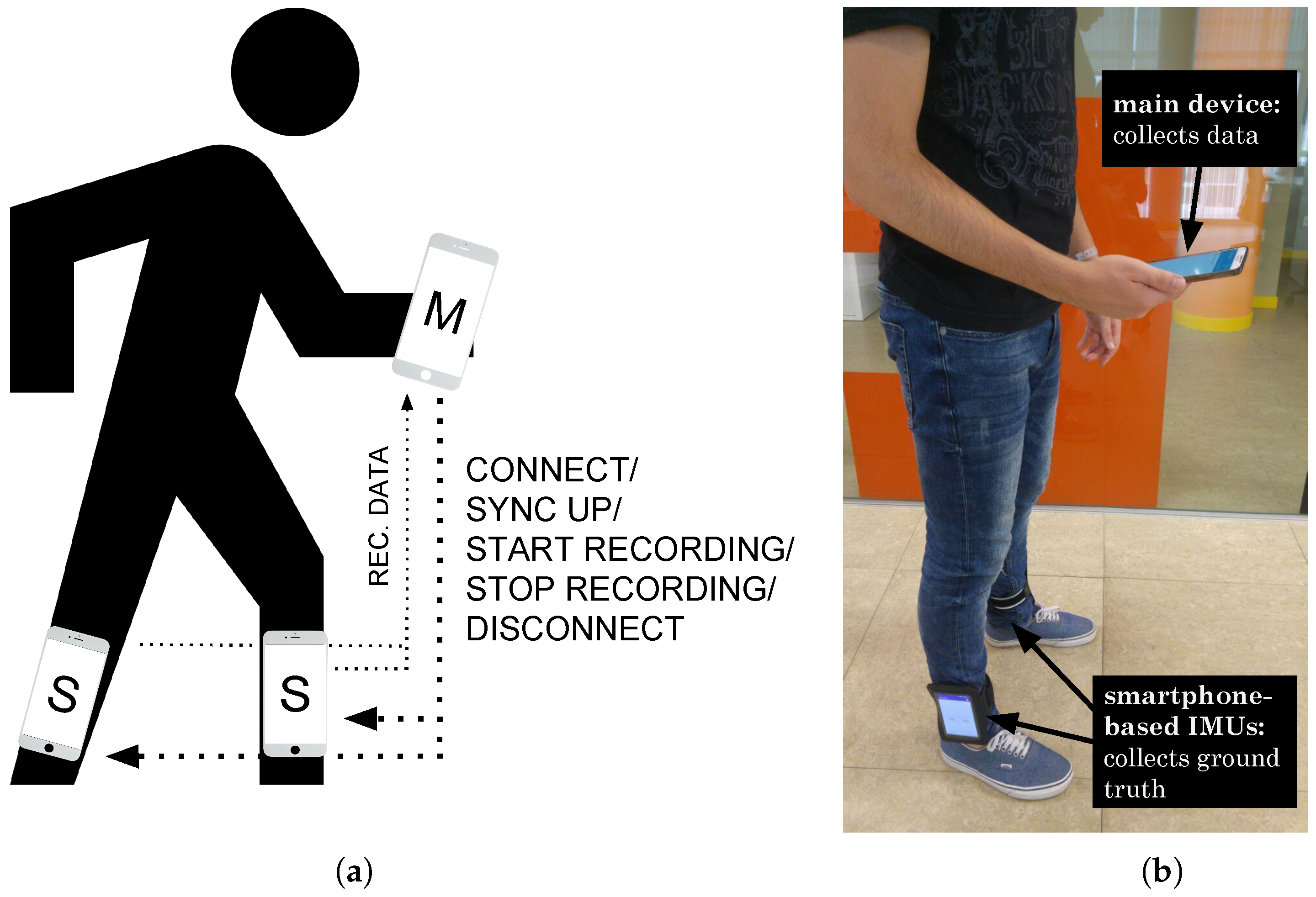
4.1. Obtaining the Ground Truth
4.2. Step Detection and Walking Recognition Performance Analysis
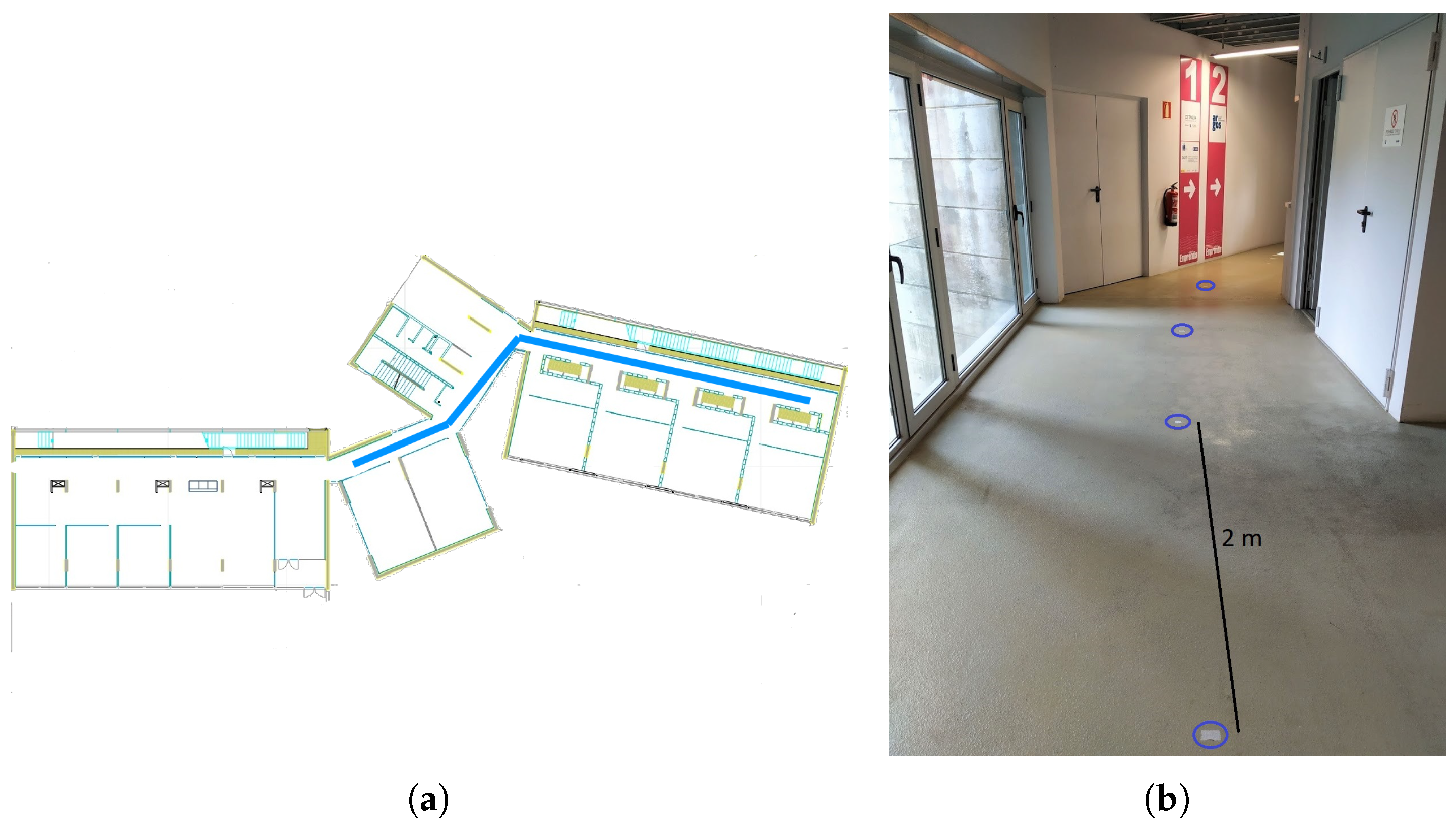
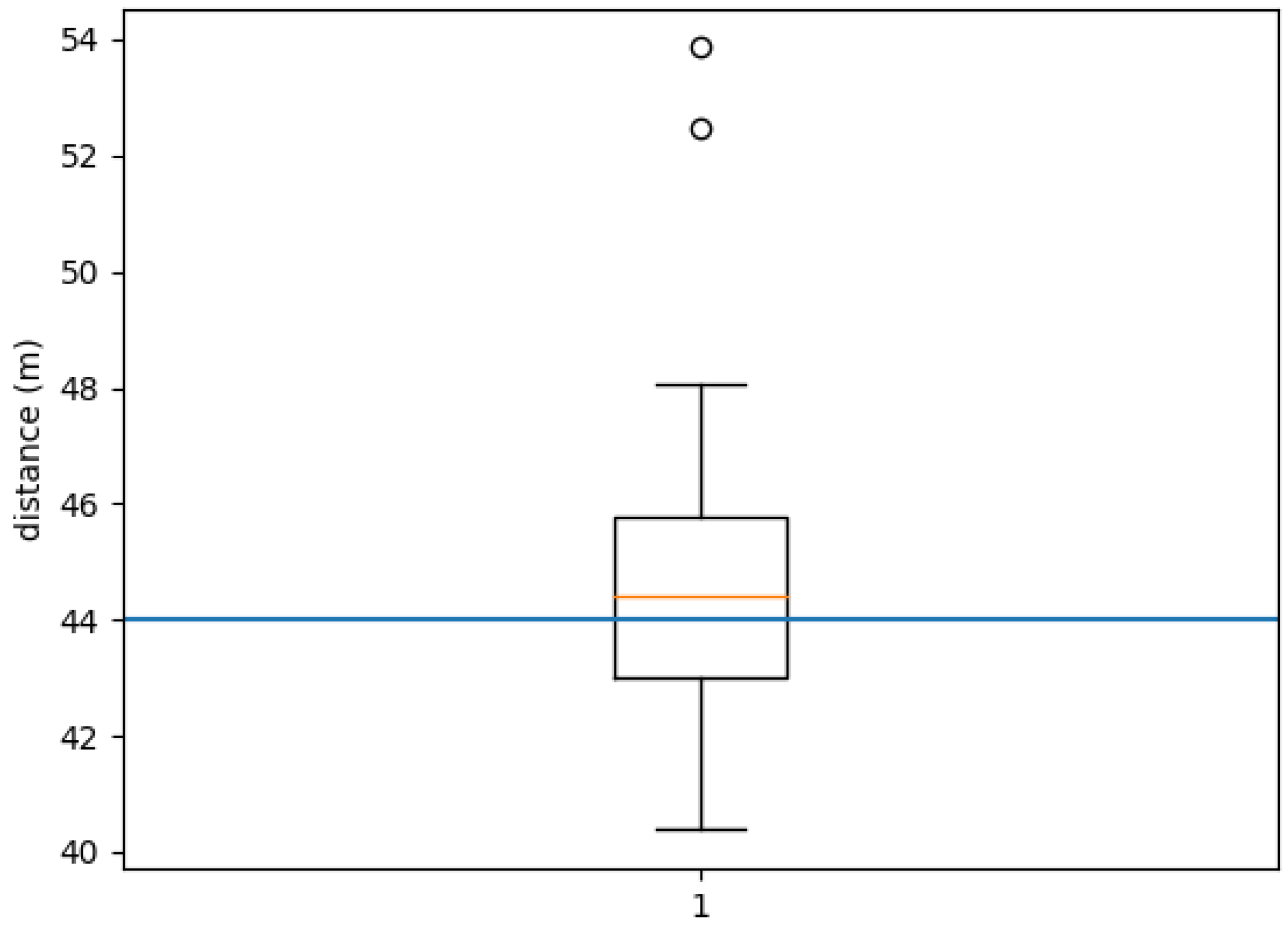
4.3. Analysis of the Estimated Distance
4.4. Analysis of the Independence of Our Proposal to the Hardware Being Used
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lu, H.; Huang, J.; Saha, T.; Nachman, L. Unobtrusive gait verification for mobile phones. In Proceedings of the 2014 ACM International Symposium on Wearable Computers, Seattle, WA, USA, 13–17 September 2014; pp. 91–98. [Google Scholar]
- Ren, Y.; Chen, Y.; Chuah, M.C.; Yang, J. User verification leveraging gait recognition for smartphone enabled mobile healthcare systems. IEEE Trans. Mob. Comput. 2015, 14, 1961–1974. [Google Scholar] [CrossRef]
- Teixeira, T.; Jung, D.; Dublon, G.; Savvides, A. PEM-ID: Identifying people by gait-matching using cameras and wearable accelerometers. In Proceedings of the Third ACM/IEEE International Conference on Distributed Smart Cameras, Como, Italy, 30 August–2 September 2009; pp. 1–8. [Google Scholar]
- Dutta, S.; Chatterjee, A.; Munshi, S. An automated hierarchical gait pattern identification tool employing cross-correlation-based feature extraction and recurrent neural network based classification. Expert Syst. 2009, 26, 202–217. [Google Scholar] [CrossRef]
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of wireless indoor positioning techniques and systems. IEEE Trans. Syst. Man Cybern. Part C (Appl. Rev.) 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Randell, C.; Muller, H. Low cost indoor positioning system. In International Conference on Ubiquitous Computing; Springer: Berlin/Heidelberg, Germany, 2001; pp. 42–48. [Google Scholar]
- Mautz, R.; Tilch, S. Survey of optical indoor positioning systems. In Proceedings of the 2011 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Guimaraes, Portugal, 21–23 September 2011; pp. 1–7. [Google Scholar]
- Harle, R. A survey of indoor inertial positioning systems for pedestrians. IEEE Commun. Surv. Tutor. 2013, 15, 1281–1293. [Google Scholar] [CrossRef]
- Kourogi, M.; Ishikawa, T.; Kurata, T. A method of pedestrian dead reckoning using action recognition. In Proceedings of the 2010 IEEE/ION Position Location and Navigation Symposium (PLANS), Indian Wells, CA, USA, 4–6 May 2010; pp. 85–89. [Google Scholar]
- Vathsangam, H.; Emken, A.; Spruijt-Metz, D.; Sukhatme, G.S. Toward free-living walking speed estimation using Gaussian Process-based Regression with on-body accelerometers and gyroscopes. In Proceedings of the 2010 4th International Conference on Pervasive Computing Technologies for Healthcare, Munich, Germany, 22–25 March 2010; pp. 1–8. [Google Scholar] [CrossRef]
- Steinhoff, U.; Schiele, B. Dead reckoning from the pocket-an experimental study. In Proceedings of the 2010 IEEE International Conference on Pervasive Computing and Communications (PerCom), Mannheim, Germany, 29 March–2 April 2010; pp. 162–170. [Google Scholar]
- Yang, J.; Lu, H.; Liu, Z.; Boda, P.P. Physical activity recognition with mobile phones: Challenges, methods, and applications. In Multimedia Interaction and Intelligent User Interfaces; Springer: London, UK, 2010; pp. 185–213. [Google Scholar]
- Stirling, R.; Collin, J.; Fyfe, K.; Lachapelle, G. An innovative shoe-mounted pedestrian navigation system. In Proceedings of the European Navigation Conference GNSS, Graz, Austria, 22–25 April 2003; Volume 110. [Google Scholar]
- Lee, H.H.; Choi, S.; Lee, M.J. Step detection robust against the dynamics of smartphones. Sensors 2015, 15, 27230–27250. [Google Scholar] [CrossRef] [PubMed]
- Bayat, A.; Pomplun, M.; Tran, D.A. A study on human activity recognition using accelerometer data from smartphones. Procedia Comput. Sci. 2014, 34, 450–457. [Google Scholar] [CrossRef]
- Jimenez, A.R.; Seco, F.; Prieto, C.; Guevara, J. A comparison of pedestrian dead-reckoning algorithms using a low-cost MEMS IMU. In Proceedings of the 2009 IEEE International Symposium on Intelligent Signal Processing, Budapest, Hungary, 26–28 August 2009; pp. 37–42. [Google Scholar]
- Qian, J.; Ma, J.; Ying, R.; Liu, P.; Pei, L. An improved indoor localization method using smartphone inertial sensors. In Proceedings of the 2013 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Montbeliard-Belfort, France, 28–31 October 2013; pp. 1–7. [Google Scholar]
- Susi, M.; Renaudin, V.; Lachapelle, G. Motion mode recognition and step detection algorithms for mobile phone users. Sensors 2013, 13, 1539–1562. [Google Scholar] [CrossRef] [PubMed]
- Goyal, P.; Ribeiro, V.J.; Saran, H.; Kumar, A. Strap-down pedestrian dead-reckoning system. In Proceedings of the 2011 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Guimaraes, Portugal, 21–23 September 2011; pp. 1–7. [Google Scholar]
- Chen, L.; Özsu, M.T.; Oria, V. Robust and fast similarity search for moving object trajectories. In Proceedings of the 2005 ACM SIGMOD International Conference on Management of Data, Baltimore, MD, USA, 14–16 June 2005; pp. 491–502. [Google Scholar]
- Berndt, D.J.; Clifford, J. Using dynamic time warping to find patterns in time series. In Proceedings of the KDD Workshop, Seattle, WA, USA, 31 July–1 August 1994; Volume 10, pp. 359–370. [Google Scholar]
- Vlachos, M.; Kollios, G.; Gunopulos, D. Discovering similar multidimensional trajectories. In Proceedings of the 18th International Conference on Data Engineering, San Jose, CA, USA, 26 February–1 March 2002; pp. 673–684. [Google Scholar] [Green Version]
- Brajdic, A.; Harle, R. Walk detection and step counting on unconstrained smartphones. In Proceedings of the 2013 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Zurich, Switzerland, 8–12 September 2013; pp. 225–234. [Google Scholar]
- Sasaki, J.E.; John, D.; Freedson, P.S. Validation and comparison of ActiGraph activity monitors. J. Sci. Med. Sport 2011, 14, 411–416. [Google Scholar] [CrossRef] [PubMed]
- Esliger, D.W.; Probert, A.; Connor, S.G.; Bryan, S.; Laviolette, M.; Tremblay, M.S. Validity of the Actical accelerometer step-count function. Med. Sci. Sports Exerc. 2007, 39, 1200–1204. [Google Scholar] [CrossRef] [PubMed]
- Webster, K.E.; Wittwer, J.E.; Feller, J.A. Validity of the GAITRite® walkway system for the measurement of averaged and individual step parameters of gait. Gait Posture 2005, 22, 317–321. [Google Scholar] [CrossRef] [PubMed]
- O’Connell, S.; Olaighin, G.; Quinlan, L.R. When a step is not a step! Specificity analysis of five physical activity monitors. PLoS ONE 2017, 12, e0169616. [Google Scholar] [CrossRef] [PubMed]
- Grewal, M.S.; Weill, L.R.; Andrews, A.P. Global Positioning Systems, Inertial Navigation, and Integration; John Wiley & Sons: New York, NY, USA, 2007. [Google Scholar]
- Shuster, M.D. A survey of attitude representations. Navigation 1993, 8, 439–517. [Google Scholar]
- Madgwick, S.O. An Efficient Orientation Filter for Inertial and Inertial/Magnetic Sensor Arrays; Report x-io; University of Bristol: Bristol, UK, 2010. [Google Scholar]
- Simon, D. Optimal State Estimation: Kalman, H Infinity, and Nonlinear Approaches; John Wiley & Sons: Hoboken, NJ, USA, 2006. [Google Scholar]
- Thrun, S. Probabilistic robotics. Commun. ACM 2002, 45, 52–57. [Google Scholar] [CrossRef]
- Sabatini, A.M. Kalman-Filter-Based Orientation Determination Using Inertial/Magnetic Sensors: Observability Analysis and Performance Evaluation. Sensors 2011, 11, 9182–9206. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zijlstra, W.; Hof, A.L. Displacement of the pelvis during human walking: Experimental data and model predictions. Gait Posture 1997, 6, 249–262. [Google Scholar] [CrossRef]
- Li, F.; Zhao, C.; Ding, G.; Gong, J.; Liu, C.; Zhao, F. A reliable and accurate indoor localization method using phone inertial sensors. In Proceedings of the 2012 ACM Conference on Ubiquitous Computing— UbiComp ’12, Pittsburgh, PA, USA, 5–8 September 2012; p. 421. [Google Scholar] [CrossRef]
- Rai, A.; Chintalapudi, K.K.; Padmanabhan, V.N.; Sen, R. Zee: Zero-effort crowdsourcing for indoor localization. In Proceedings of the 18th Annual International Conference on Mobile Computing and Networking, Istanbul, Turkey, 22–26 August 2012; pp. 293–304. [Google Scholar]
- Durrant-Whyte, H.F.; Henderson, T.C. Multisensor data fusion. In Springer Handbook of Robotics; Siciliano, B., Khatib, O., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; pp. 585–610. [Google Scholar]
- Breiman, L. Bagging predictors. Mach. Learn. 1996, 24, 123–140. [Google Scholar] [CrossRef] [Green Version]
- Preece, S.J.; Goulermas, J.Y.; Kenney, L.P.J.; Howard, D.; Meijer, K.; Crompton, R. Activity identification using body-mounted sensors—A review of classification techniques. Physiol. Meas. 2009, 30, R1–R33. [Google Scholar] [CrossRef] [PubMed]
- Yang, J.Y.; Wang, J.S.; Chen, Y.P. Using acceleration measurements for activity recognition: An effective learning algorithm for constructing neural classifiers. Pattern Recognit. Lett. 2008, 29, 2213–2220. [Google Scholar] [CrossRef]
- Bernecker, T.; Graf, F.; Kriegel, H.; Moennig, C.; Dill, D.; Tuermer, C. Activity Recognition on 3D Accelerometer Data; Technical Report; Institute for Informatics, Ludwig Maximilians University: Munich, Germany, 2012; pp. 1–22. [Google Scholar]
- Guyon, I.; Weston, J.; Barnhill, S.; Vapnik, V. Gene selection for cancer classification using support vector machines. Mach. Learn. 2002, 46, 389–422. [Google Scholar] [CrossRef]
- Zhang, A.; Yang, B.; Huang, L. Feature extraction of EEG signals using power spectral entropy. In Proceedings of the 2018 International Conference on BioMedical Engineering and Informatics, Sanya, China, 27–30 May 2008; Volume 2, pp. 435–439. [Google Scholar]
- Thomas, M.; Jankovic, J.; Suteerawattananon, M.; Wankadia, S.; Caroline, K.S.; Vuong, K.D.; Protas, E. Clinical gait and balance scale (GABS): Validation and utilization. J. Neurol. Sci. 2004, 217, 89–99. [Google Scholar] [CrossRef] [PubMed]
- Gopal, K. TrueTime for Android. 2016. Available online: https://github.com/instacart/truetime-android (accessed on 17 September 2018).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (a) Complete Dataset | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Peak Valley | Classifier | Complete System | |||||||||
| True | False | True | False | True | False | ||||||
| GT | true | 13,104 (85%) | 706 (5%) | true | 12,544 (85%) | 560 (4%) | true | 12,544 (83%) | 1266 (8%) | ||
| false | 1640 (10%) | - | false | 1259 (8%) | 381 (3%) | false | 1259 (8%) | - | |||
| (b) Hand | |||||||||||
| Peak Valley | Classifier | Complete System | |||||||||
| True | False | True | False | True | False | ||||||
| GT | true | 5775 (92%) | 213 (4%) | true | 5630 (92%) | 145 (2%) | true | 5630 (90%) | 358 (6%) | ||
| false | 311 (5%) | - | false | 259 (4%) | 52 (1%) | false | 259 (4%) | - | |||
| (c) Pocket | |||||||||||
| Peak Valley | Classifier | Complete System | |||||||||
| True | False | True | False | True | False | ||||||
| GT | true | 2848 (83%) | 195 (6%) | true | 2693 (83%) | 155 (5%) | true | 2693 (80%) | 350 (10%) | ||
| false | 398 (12%) | - | false | 320 (10%) | 78 (2%) | false | 320 (10%) | - | |||
| (d) Hybrid | |||||||||||
| Peak Valley | Classifier | Complete System | |||||||||
| True | False | True | False | True | False | ||||||
| GT | true | 2547 (84%) | 163 (5%) | true | 2410 (84%) | 137 (5%) | true | 2410 (81%) | 300 (10%) | ||
| false | 321 (11%) | - | false | 255 (9%) | 66 (2%) | false | 255 (9%) | - | |||
| (e) Not Walking | |||||||||||
| Peak Valley | Classifier | Complete System | |||||||||
| True | False | True | False | True | False | ||||||
| GT | true | 137 (26%) | 22 (4%) | true | 114 (23%) | 23 (4%) | true | 114 (30%) | 45 (12%) | ||
| false | 368 (70%) | - | false | 226 (45%) | 142 (28%) | false | 226 (59%) | - | |||
| Total Steps | |||||
|---|---|---|---|---|---|
| Dataset | Hand | Hybrid | Not Walking | ||
| GT | 13,810 | 5988 | 3043 | 2710 | 159 |
| PV | 14,744 | 6086 | 3246 | 2868 | 505 |
| PV + C | 13,803 | 5889 | 3013 | 2665 | 340 |
| Distance (m) | |
|---|---|
| Average | 45.11 |
| Standard Deviation | 3.31 |
| Maximum | 53.8 |
| Minimum | 40.38 |
| Hand | ||||
|---|---|---|---|---|
| Experiment 1 | Experiment 2 | Experiment 3 | Experiment 4 | |
| BQ Aquaris E5 | 58 | 57 | 58 | 60 |
| Samsung Galaxy A2 | 58 | 58 | 59 | 59 |
| Xiaomi Mi A2 | 58 | 58 | 59 | 62 |
| Motorola Moto G6 plus | 58 | 58 | 61 | 60 |
| OnePlus 2 | 58 | 58 | 60 | 59 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rodríguez, G.; Casado, F.E.; Iglesias, R.; Regueiro, C.V.; Nieto, A. Robust Step Counting for Inertial Navigation with Mobile Phones. Sensors 2018, 18, 3157. https://doi.org/10.3390/s18093157
Rodríguez G, Casado FE, Iglesias R, Regueiro CV, Nieto A. Robust Step Counting for Inertial Navigation with Mobile Phones. Sensors. 2018; 18(9):3157. https://doi.org/10.3390/s18093157
Chicago/Turabian StyleRodríguez, Germán, Fernando E. Casado, Roberto Iglesias, Carlos V. Regueiro, and Adrián Nieto. 2018. "Robust Step Counting for Inertial Navigation with Mobile Phones" Sensors 18, no. 9: 3157. https://doi.org/10.3390/s18093157
APA StyleRodríguez, G., Casado, F. E., Iglesias, R., Regueiro, C. V., & Nieto, A. (2018). Robust Step Counting for Inertial Navigation with Mobile Phones. Sensors, 18(9), 3157. https://doi.org/10.3390/s18093157