Ultrasonic Tethering to Enable Side-by-Side Following for Powered Wheelchairs



Abstract
:1. Introduction
2. Methodology
- Maintain conversation distance to minimum 60 cm and maximum 180 cm [23]
- Maintain tether when a person walks alongside the wheelchair and break tether when the person is no longer available
- Work with the powered wheelchair joystick controller, to allow user to retake joystick control at any time
- Perform as intended in low light
- Inexpensive and easy to connect and attach/detach to any powered wheelchair
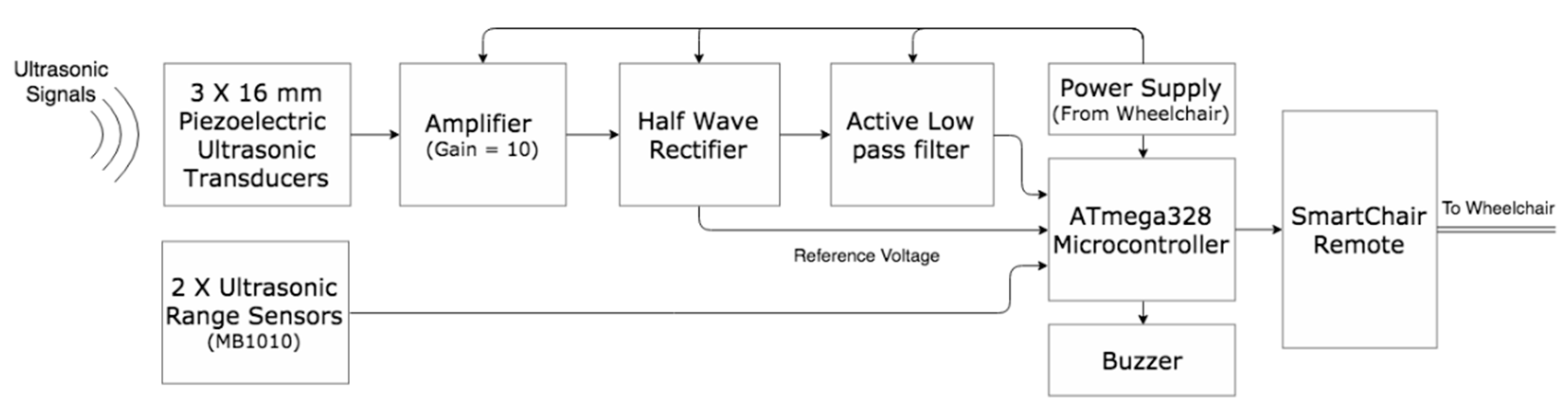
2.1. System Architecture
2.1.1. Identifying the Accompanying Person
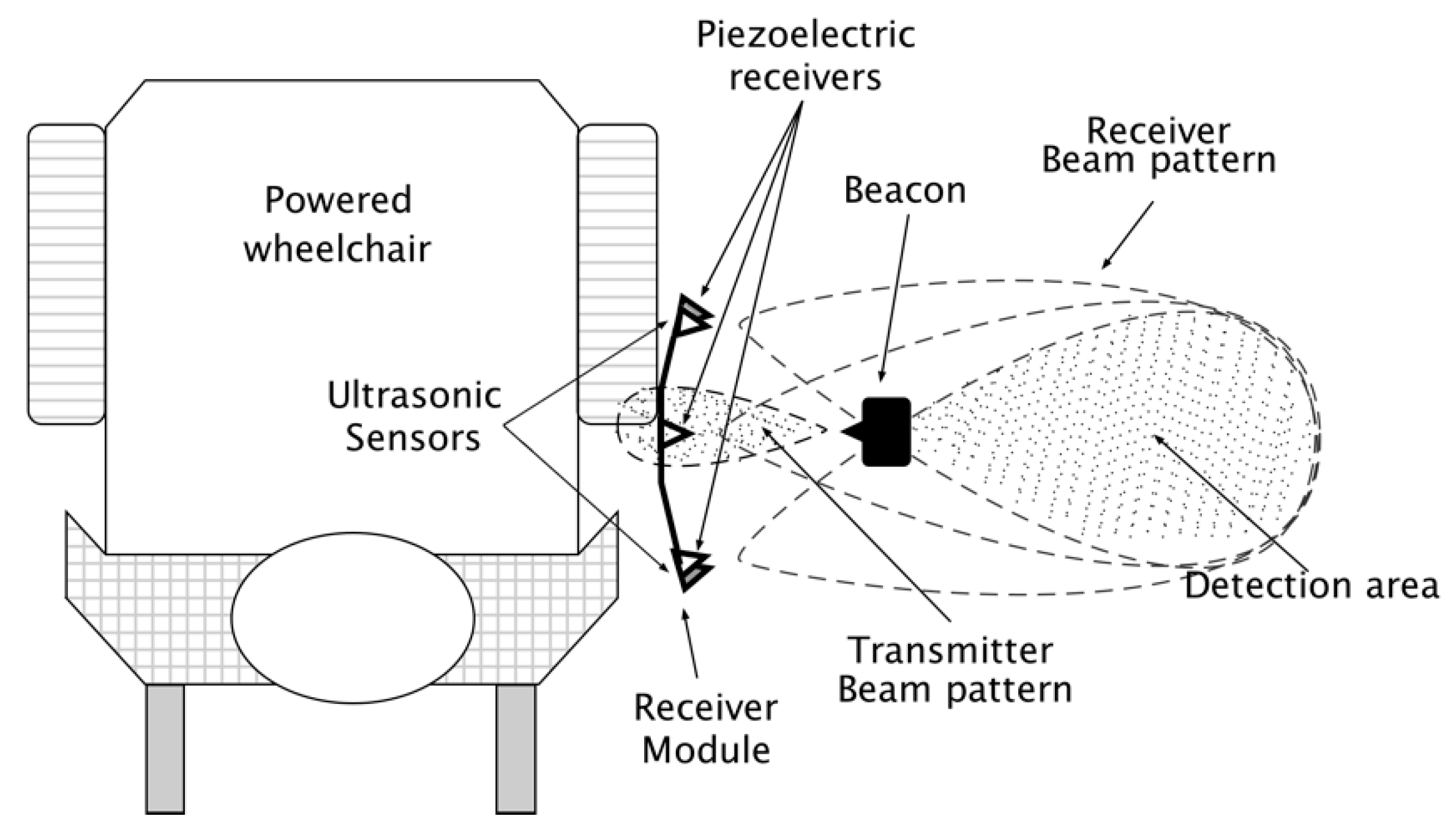
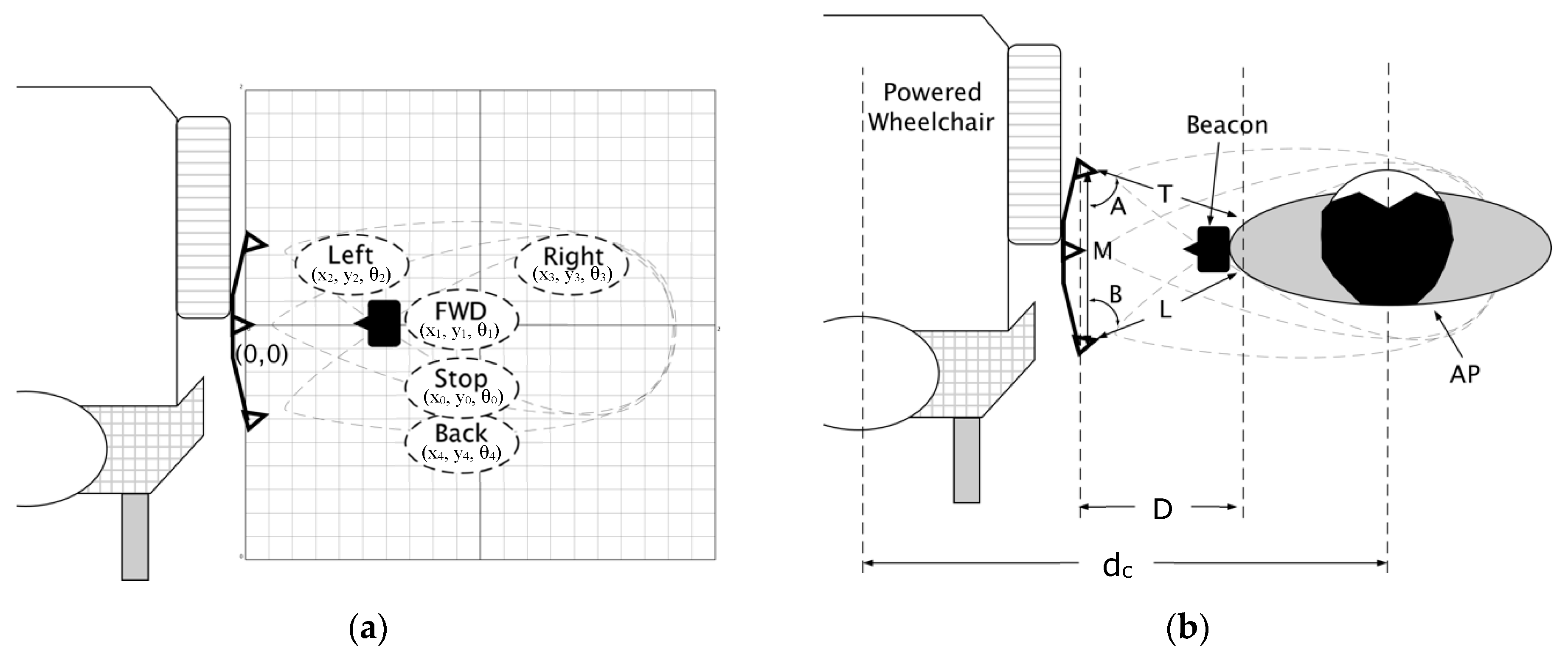
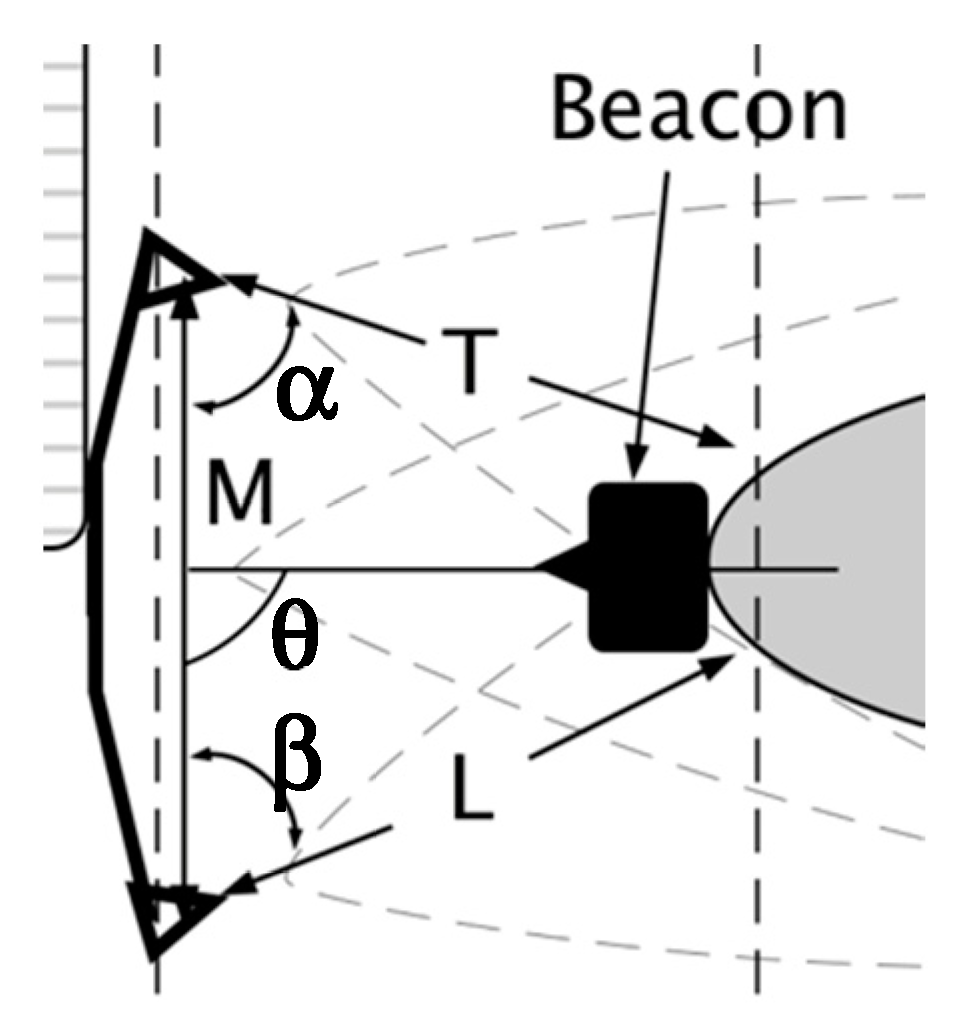
2.1.2. Determining Accompanying Person Position and Heading
2.2. Identification and Pose Detection Algorithm
3. Simulation
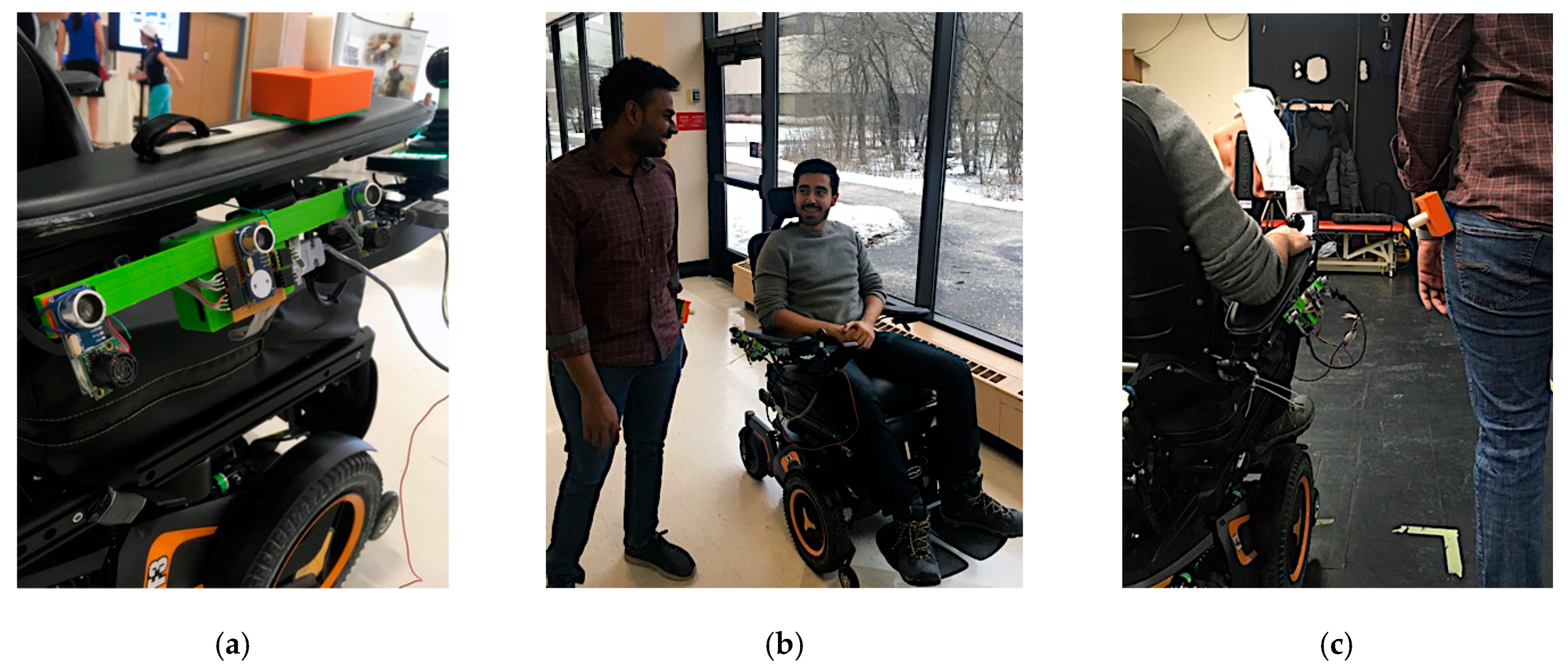
4. Prototype
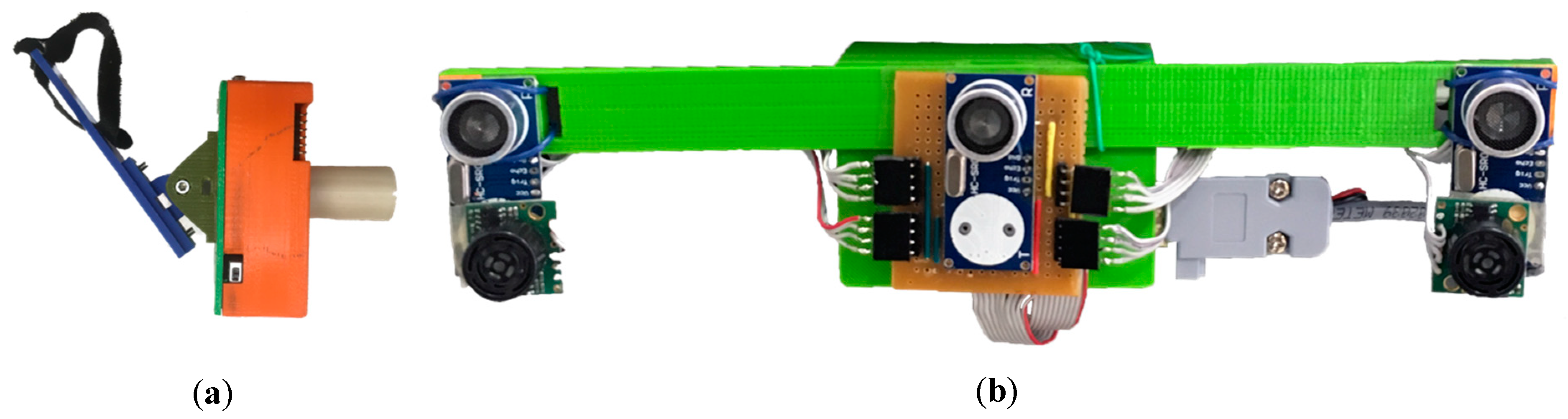
4.1. Accompanying Person Beacon
4.2. Receiver on the Powered Wheelchair
4.3. Accompanying Person Feedback and Ultrasonic Tethering System Integration with the Powered Wheelchair
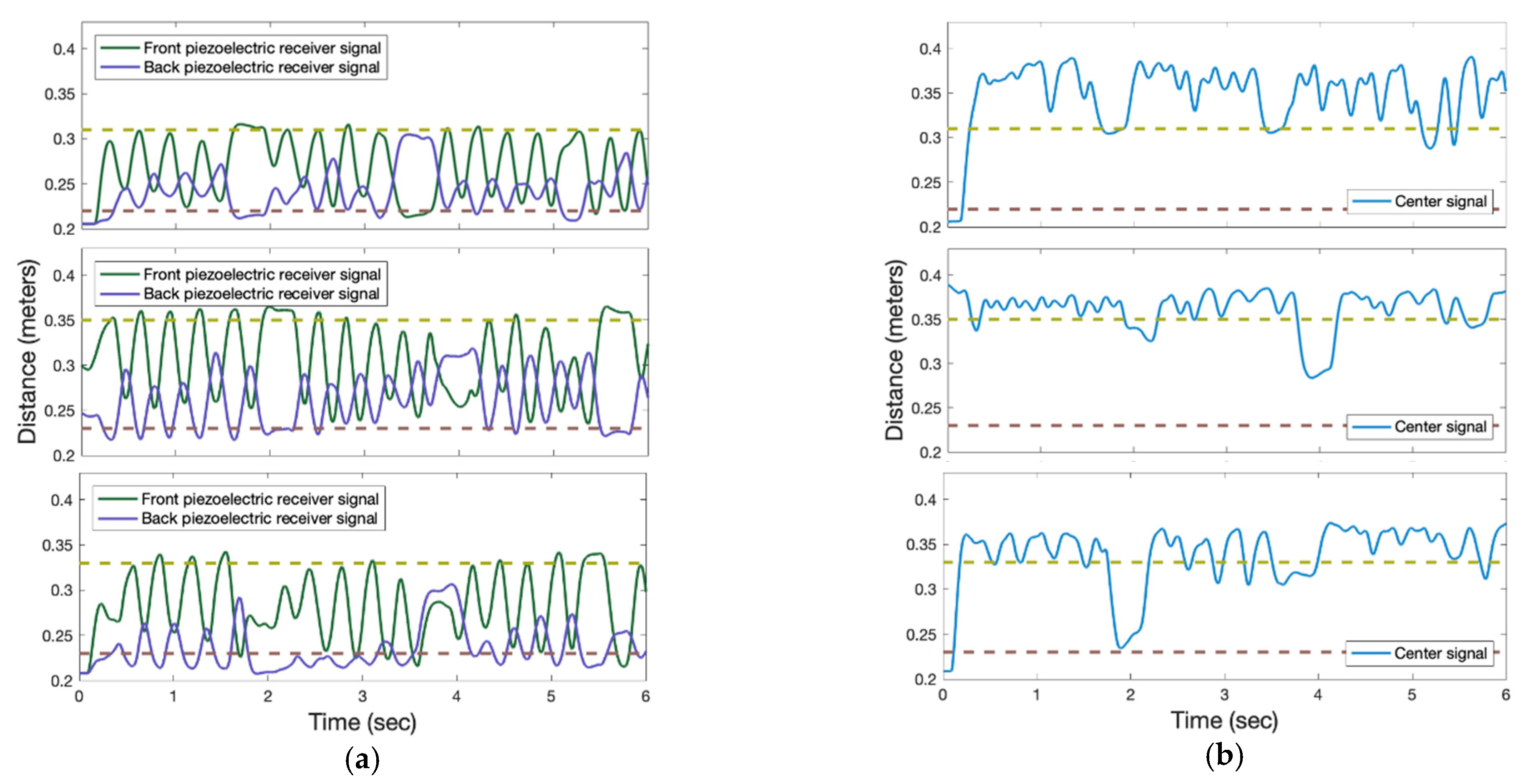
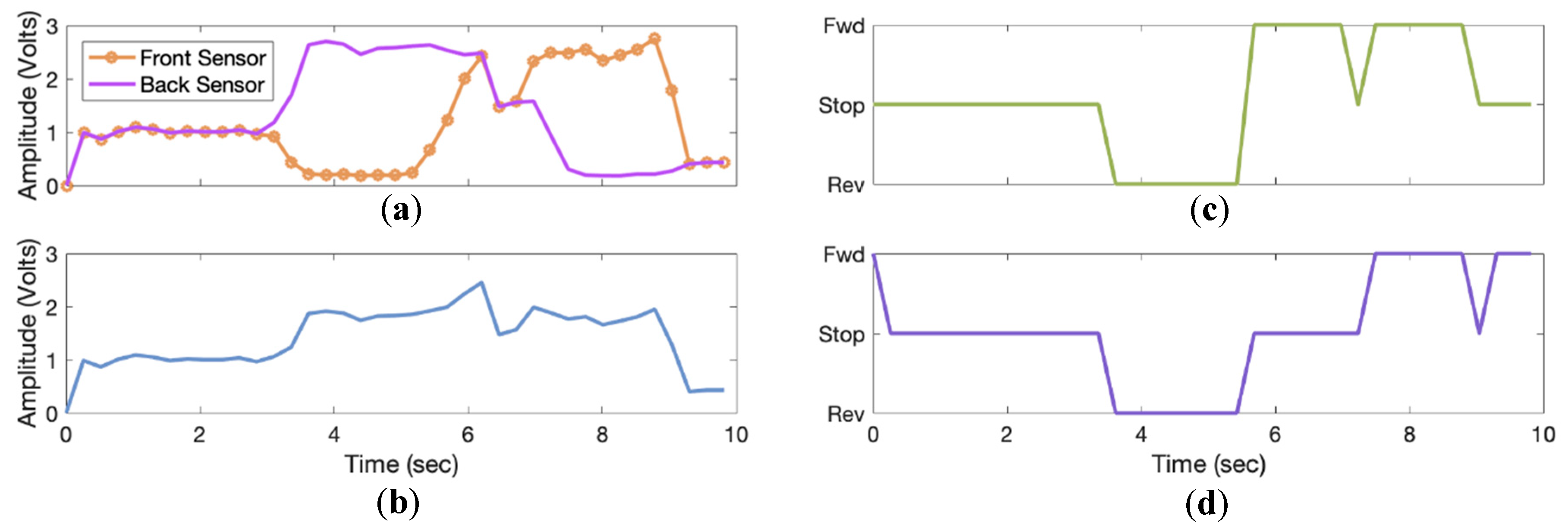
4.4. Sensor Calibration
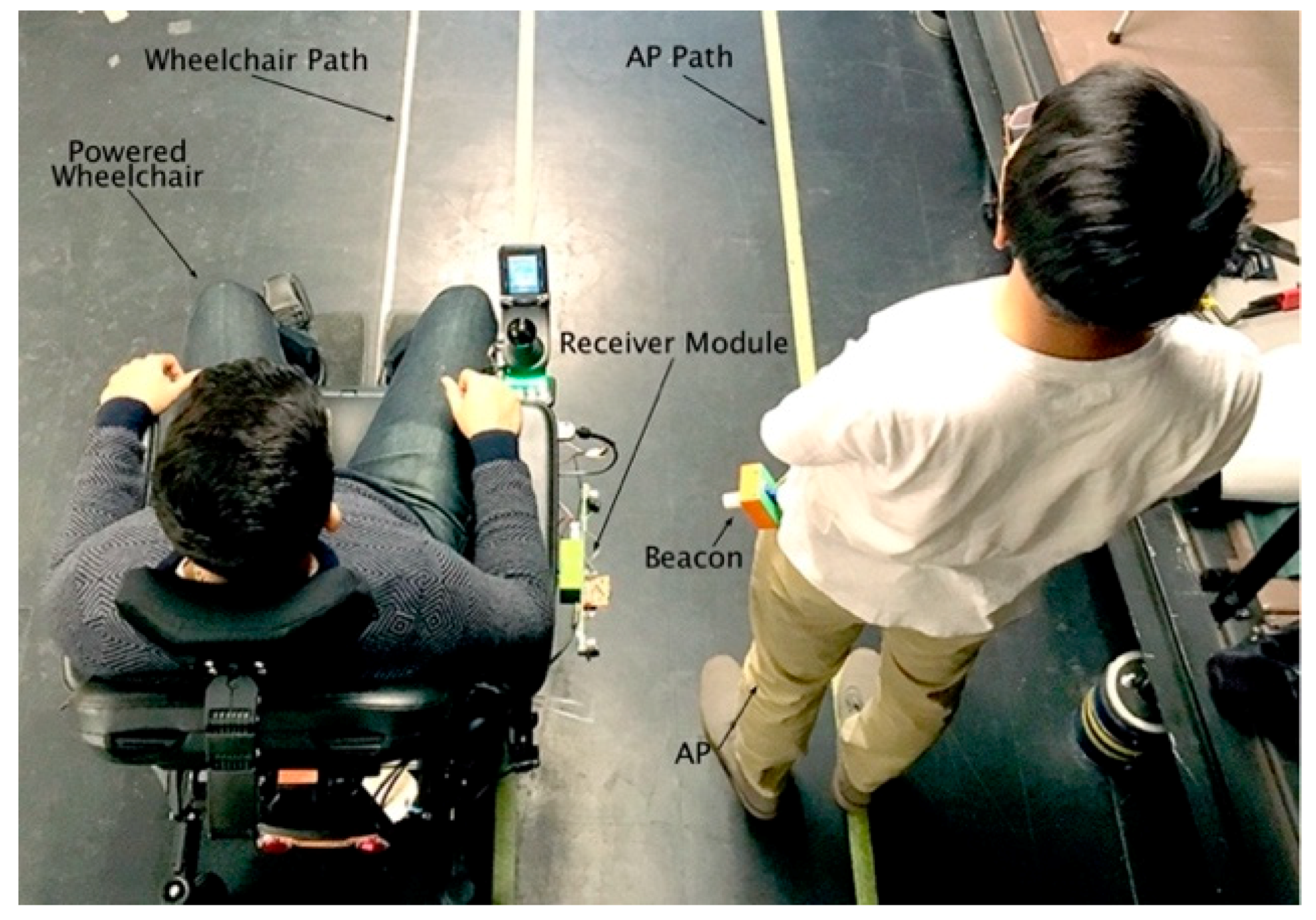
5. Ultrasonic Tethering System Experimental Test Protocol
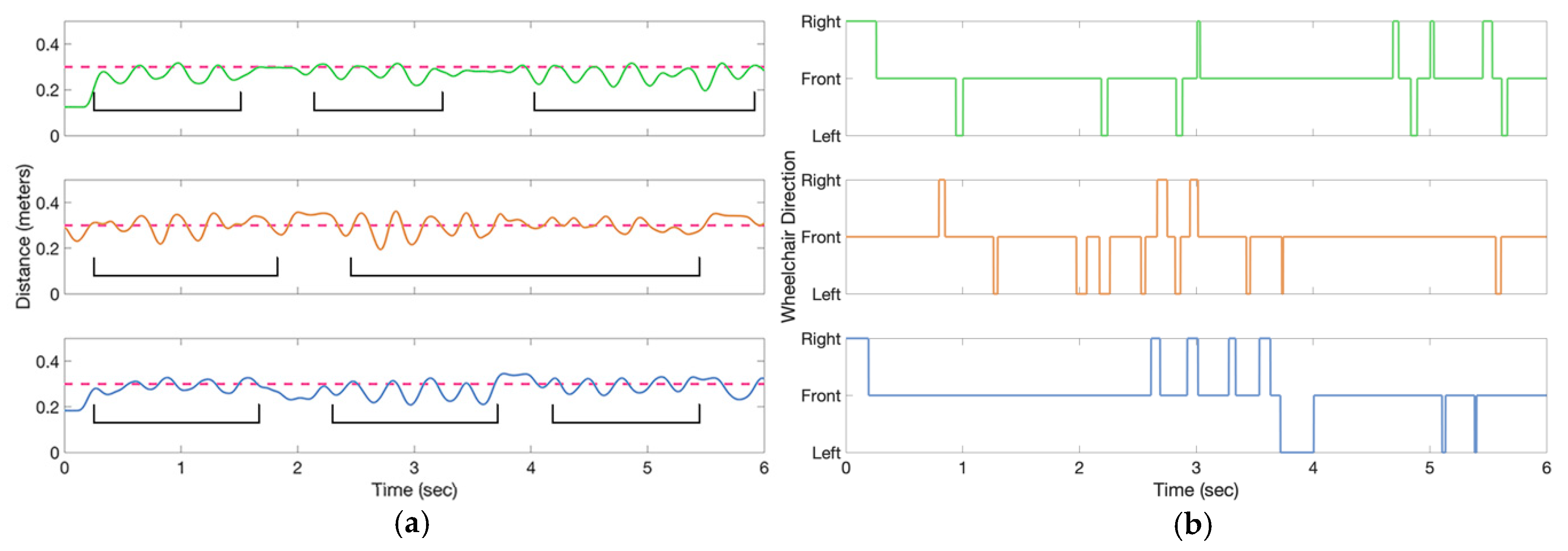
6. Results
7. Discussion
8. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kairy, D.; Rushton, P.W.; Archambault, P.; Pituch, E.; Torkia, C.; El Fathi, A.; Stone, P.; Routhier, F.; Forget, R.; Demers, L.; et al. Exploring powered wheelchair users and their caregivers’ perspectives on potential intelligent power wheelchair use: A qualitative study. Int. J. Environ. Res. Public Health 2014, 11, 2244–2261. [Google Scholar] [CrossRef] [PubMed]
- Simpson, R.C. Smart wheelchairs: A literature review. J. Rehabil. Res. Dev. 2005, 42, 423. [Google Scholar] [CrossRef] [PubMed]
- Fehr, L.; Langbein, W.E.; Skaar, S.B. Adequacy of power wheelchair control interfaces for persons with severe disabilities: A clinical survey. J. Rehabil. Res. Dev. 2000, 37, 353–360. [Google Scholar] [PubMed]
- Evans, S.; Frank, A.O.; Neophytou, C.; de Souza, L. Older adults’ use of, and satisfaction with, electric powered indoor/outdoor wheelchairs. Age Ageing 2007, 36, 431–435. [Google Scholar] [CrossRef] [PubMed]
- Gavin-Dreschnack, D.; Nelson, A.; Fitzgerald, S.; Harrow, J.; Sanchez-Anguiano, A.; Ahmed, S.; Powell-Cope, G. Wheelchair-related falls: Current evidence and directions for improved quality care. J. Nurs. Care Qual. 2005, 20, 119–127. [Google Scholar] [CrossRef] [PubMed]
- Leaman, J.; La, H.M.; Member, S. A Comprehensive Review of Smart Wheelchairs: A Comprehensive Review of Smart Wheelchairs: Past, Present and Future. IEEE Trans. Hum.-Mach. Syst. 2017, 47, 486–499. [Google Scholar] [CrossRef]
- Hu, H.H.; Jia, P.; Lu, T.; Yuan, K. Head gesture recognition for hands-free control of an intelligent wheelchair. Ind. Robot 2007, 34, 60–68. [Google Scholar]
- Zhang, Y.; Xu, S.C. ROS Based Voice-Control Navigation of Intelligent Wheelchair. Appl. Mech. Mater. 2015, 733, 740–744. [Google Scholar] [CrossRef]
- Kundu, A.S.; Mazumder, O.; Lenka, P.K.; Bhaumik, S. Hand Gesture Recognition Based Omnidirectional Wheelchair Control Using IMU and EMG Sensors. J. Intell. Robot. Syst. Theory Appl. 2018, 91, 529–541. [Google Scholar] [CrossRef]
- Lund, M.E.; Christiensen, H.V.; Caltenco, H.A.; Lontis, E.R.; Bentsen, B.; Struijk, L.N.S.A. Inductive tongue control of powered wheelchairs. In Proceedings of the 2010 Annual International Conference of the IEEE Engineering in Medicine and Biology, Buenos Aires, Argentina, 31 August–4 September 2010; pp. 3361–3364. [Google Scholar]
- Ch, J.U.; Youn, I.; Choi, K.; Lee, Y.J. Human-following robot using tether steering. Int. J. Precis. Eng. Manuf. 2011, 12, 899–906. [Google Scholar] [CrossRef]
- Na, S.; Ahn, H.S.; Lee, Y.C.; Yu, W. Navi-guider: An intuitive guiding system for the mobile robot. In Proceedings of the RO-MAN 2007 16th IEEE International Symposium on Robot and Human Interactive Communication, Jeju, Korea, 26–29 August 2007; pp. 228–233. [Google Scholar]
- Kawarazaki, N.; Kuwae, L.T.; Yoshidome, T. Development of Human Following Mobile Robot System Using Laser Range Scanner. Procedia Comput. Sci. 2015, 76, 455–460. [Google Scholar] [CrossRef]
- Kobayashi, Y.; Suzuki, R.; Kuno, Y. Robotic wheelchair with omni-directional vision for moving alongside a caregiver. In Proceedings of the 38th Annual Conference on IEEE Industrial Electronics Society, Montreal, QC, Canada, 25–28 October 2012; pp. 4177–4182. [Google Scholar]
- Miyazaki, K.; Hashimoto, M.; Shimada, M.; Takahashi, K. Guide Following Control Using Laser Range Sensor for a Smart Wheelchair. In Proceedings of the ICROS-SICE, Fukuoka, Japan, 18–21 August 2009; pp. 4613–4616. [Google Scholar]
- Zhang, J.; Wang, J.; Chen, W. A control system of driver assistance and human following for smart wheelchair. In Proceedings of the 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014), Bali, Indonesia, 5–10 December 2014; pp. 1927–1932. [Google Scholar]
- Motokucho, T.; Oda, N. Vision-based human-following control using optical flow field for power assisted wheelchair. In Proceedings of the 2014 IEEE 13th International Workshop on Advanced Motion Control (AMC), Yokohama, Japan, 14–16 March 2014; pp. 266–271. [Google Scholar]
- Wu, B.-F.; Jen, C.-L.; Tsou, T.-Y.; Li, W.-F.; Tseng, P.-Y. Accompanist detection and following for wheelchair robots with fuzzy controller. In Proceedings of the 2012 International Conference on Advanced Mechatronic Systems, Tokyo, Japan, 18–21 September 2012; pp. 638–643. [Google Scholar]
- Everett, H.R. Sensors for Mobile Robots: Theory and Application; CRC Press: New York, NY, USA, 1996; Volume 12, p. 922. [Google Scholar]
- Panda, K.G.; Agrawal, D.; Nshimiyimana, A.; Hossain, A. Effects of environment on accuracy of ultrasonic sensor operates in millimetre range. Perspect. Sci. 2016, 8, 574–576. [Google Scholar] [CrossRef]
- MaxBotix, LV-MaxSonar®-EZTM Series. 2015, pp. 1–12. Available online: https://www.maxbotix.com/documents/LV-MaxSonar-EZ_Datasheet.pdf (accessed on 15 December 2018).
- Wang, K.; Awad, T. Eightfold Technologies. Available online: http://www.eightfoldtech.com/products/ (accessed on 15 December 2018).
- Hall, E.T. A System for the Notation of Proxemic Behavior. Am. Anthropol. 1963, 65, 1003–1026. [Google Scholar] [CrossRef] [Green Version]
- Ogiso, S.; Kawagishi, T.; Mizutani, K.; Wakatsuki, N.; Zempo, K. Self-localization method for mobile robot using acoustic beacons. ROBOMECH J. 2015, 2, 12. [Google Scholar] [CrossRef]
- Drumheller, M. Mobile Robot Localization Using Sonar. IEEE Trans. Pattern Anal. Mach. Intell. 1987, 9, 325–332. [Google Scholar] [CrossRef] [PubMed]
- Donoso-Aguirre, F.; Bustos-Salas, J.P.; Torres-Torriti, M.; Guesalaga, A. Mobile robot localization using the Hausdorff distance. Robotica 2008, 26, 129–141. [Google Scholar] [CrossRef]
- Borenstein, J.; Koren, Y. Obstacle Avoidance with Ultrasonic Sensors. IEEE J. Robot. Autom. 1988, 4, 213–218. [Google Scholar] [CrossRef]
- Marioli, D.; Narduzzi, C.; Offelli, C.; Petri, D.; Sardini, E.; Taroni, A. Digital time of flight measurement for ultrasonic sensors. IEEE Trans. Instrum. Meas. Technol. Conf. 1992, 41, 93–97. [Google Scholar] [CrossRef]
- Pingali, T.R.; Lemaire, E.D.; Baddour, N. Development of a Human Accompanying Wheelchair using Ultrasonic Tethering. In Proceedings of the OHRI Researh Day, Ottawa, ON, Canada, 9 November 2017. [Google Scholar]
- Knoblauch, R.; Pietrucha, M.; Nitzburg, M. Field Studies of Pedestrian Walking Speed and Start-Up Time. Transp. Res. Rec. J. Transp. Res. Board 1996, 1538, 27–38. [Google Scholar] [CrossRef]
- Meyns, P.; Bruijn, S.M.; Duysens, J. The how and why of arm swing during human walking. Gait Posture 2013, 38, 555–562. [Google Scholar] [CrossRef]
- Winter, D.A. Human balance and posture control during standing and walking. Gait Posture 1995, 3, 193–214. [Google Scholar] [CrossRef]
- Ravankar, A.; Ravankar, A.A.; Kobayashi, Y.; Hoshino, Y.; Peng, C.C. Path smoothing techniques in robot navigation: State-of-the-art, current and future challenges. Sensors (Switzerland) 2018, 18, 3170. [Google Scholar] [CrossRef] [PubMed]
- González, D.; Pérez, J.; Milanés, V.; Nashashibi, F. A Review of Motion Planning Techniques for Automated Vehicles. IEEE Trans. Intell. Transp. Syst. 2016, 17, 1135–1145. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Left Motor Signal | Right Motor Signal | Wheelchair Direction |
|---|---|---|
| Stop | Stop | Stop |
| Forward | Forward | Forward |
| Forward | Reverse | Right |
| Reverse | Forward | Left |
| Reverse | Reverse | Backward |
| AP Tethered | System Operation | Wheelchair Control/Motion | Buzzer Operation |
|---|---|---|---|
| Unavailable, not tethered | Not tethered | Joystick Control | No output |
| Available, Tethered | Tethered | Stop | 1 s at 2 KHz |
| Available, Tethered | Tethered | Forward | No output |
| Available, Tethered | Tethered | Backward | No output |
| Available, Tethered | Tethered | Right | No output |
| Available, Tethered | Tethered | Left | No output |
| Loss of tether during operation | Not tethered | Stop + Joystick Control | 2 s at 500 Hz |
| Trial | Low Threshold (m) | High Threshold (m) | % Error |
|---|---|---|---|
| 1 | 0.22 | 0.31 | 12.0 |
| 2 | 0.23 | 0.35 | 9.8 |
| 3 | 0.23 | 0.33 | 14.1 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pingali, T.R.; Lemaire, E.D.; Baddour, N. Ultrasonic Tethering to Enable Side-by-Side Following for Powered Wheelchairs. Sensors 2019, 19, 109. https://doi.org/10.3390/s19010109
Pingali TR, Lemaire ED, Baddour N. Ultrasonic Tethering to Enable Side-by-Side Following for Powered Wheelchairs. Sensors. 2019; 19(1):109. https://doi.org/10.3390/s19010109
Chicago/Turabian StylePingali, Theja Ram, Edward D. Lemaire, and Natalie Baddour. 2019. "Ultrasonic Tethering to Enable Side-by-Side Following for Powered Wheelchairs" Sensors 19, no. 1: 109. https://doi.org/10.3390/s19010109
APA StylePingali, T. R., Lemaire, E. D., & Baddour, N. (2019). Ultrasonic Tethering to Enable Side-by-Side Following for Powered Wheelchairs. Sensors, 19(1), 109. https://doi.org/10.3390/s19010109