2.1. Wireless Power Transmission (WPT)
In recent years, wireless power transmission systems have become fascinating as a re-emerging technology. Wireless power transmission system was developed by taking the mutual induction and resonance principle, which were developed over the past years. WPT is an electric energy propagation method that enables an electrical load to receive electromagnetic energy from a power source over a distance without the use of interconnecting wires [
10,
11]. The experiments of Heinrich Hertz are the first attempt to emit high-frequency wireless power transmission using parabolic reflectors in 1888 [
12]. Hertz used induction coils connected by an oscillator to emit electricity over a tiny air gap. His experiment result confirmed the existence of electromagnetic radiation experimentally for the first time. The WPT system is composed of electromagnetic devices, control sub-systems, and power electronic circuits. WPT is useful in cases in which connecting lines are inconvenient, hazardous or impossible. By increasing the efficiency of the overall system, this technology is appealing to various applications because of its convenience and better user experience.
The most common wireless power transfer technology is electromagnetic induction. The fundamental WPT theorem is based on the equations of Maxwell. Two equations are known as the Ampere circuit and the Faraday induction laws [
13]. The Ampere circuit law describes a correlation between electric currents and the magnetic fields generated by them. According to the Kelvin-Strokes theorem, the Ampere circuit law can also be written in the form of an integral or differential equation. A line integral of the magnetic field around of any kind closed curve
c is a description of the Ampere circuit law in integral equation form. Suppose the electric current
i drifts through an area
s, which is, in turn, bounded and enclosed by curve
c, the line integral of magnetic field
B around curve
c is then equal to the total current
i drifting through area
s enclosed by
c can be written as [
14]:
where µ
0 is the magnetic constant, d
l is an infinitesimal element of the
c curve, and
J is the density of free current.
Let us say that the electric current
i drifts through a wire coming out of an area
s, a magnetic field will be generated, creating a concentric circle of magnetic field lines in the area perpendicular to the current line. The direction of the magnetic field line follows the right-hand rule, where the magnetic field line around the current
i is in the same direction as the curling right-hand finger, while the current
i in the direction of the right-hand thumb. If the shape of the closed curve
c is a circle with the radius
r centered on the current line (wire) location, the magnetic flux density can be obtained using the line integral [
14]:
The electromagnetic induction phenomenon is well explained by the basic law of electromagnetism (induction law of Faraday). In electromagnetic induction, if a time-varying magnetic flux is linked to a closed loop circuit it will then induce an electromotive force (emf) around the circuit. The Faraday induction law defines that the magnetic flux
through an area
s is the surface integral of the magnetic field
B passing through that area. The magnetic flux can be described as [
15]:
The magnetic flux rate of change is proportional to the emf induction
ε, which is defined as [
15]:
The law of Lenz states that a negative sign in the Equation (5) indicates the flow of induced current caused by emf has a direction opposite to the magnetic field that produces it.
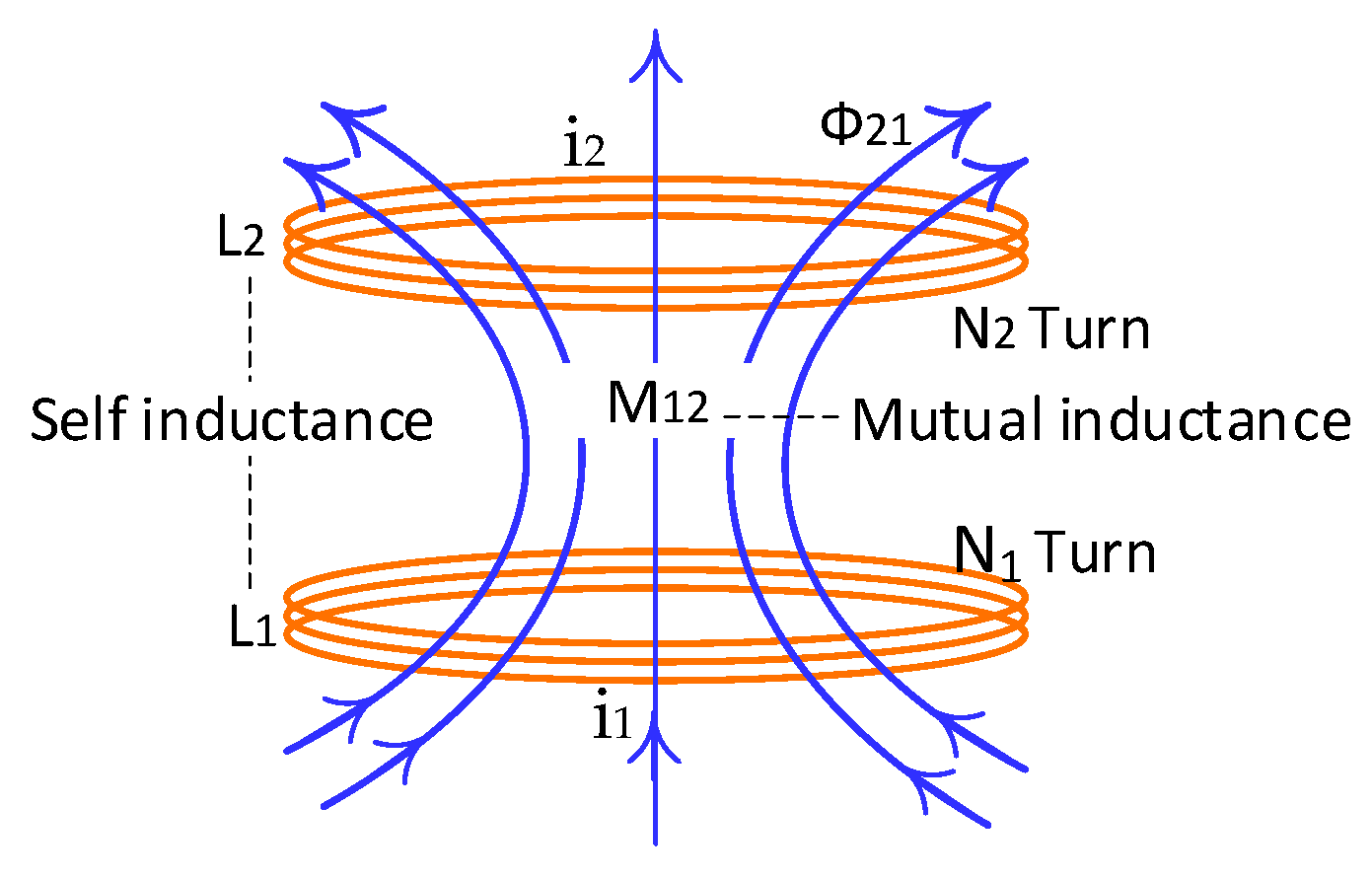
Let us see, in
Figure 1, that the two coils are placed close together.
Magnetic coupling between two independent coils means the coils affect each other through the magnetic field generated by either of them. In other words, the magnetic field generated by one coil is coupled with other coils. The first coil (coil
1) has
N1 turns that carries a current
i1 and emits a magnetic field vector
B1. Some of the magnetic field lines through coil
1 will also pass through coil
2. The magnetic flux through coil
2 due to
I1 is expressed by Φ
21. Thus, there will be an induced emf associated with the changing magnetic flux in the second coil by varying
I1 with time [
16]:
The time rate of the current change in coil
1 is equal to the time rate of magnetic flux change Φ
21 in coil
2 [
17,
18]:
In this scenario, in addition to the self-inductance (
L) of each coil, there exists another inductance known as mutual inductance
M21. It can also be written as
The mutual inductance
M21 depends only on the geometrical properties of the two coils such as the number of turns, their relative spacing, and the radius of the two coils. Another mutual inductance
M12 can be written as
The laws of Ampere and Biot-Savart can be combined using the reciprocity theorem so that the constants are equal:
While the coupling factor
k between the self-inductance of two coils (
L1 &
L2) and mutual-inductance
M12 can be defined as:
2.2. Architecture Design
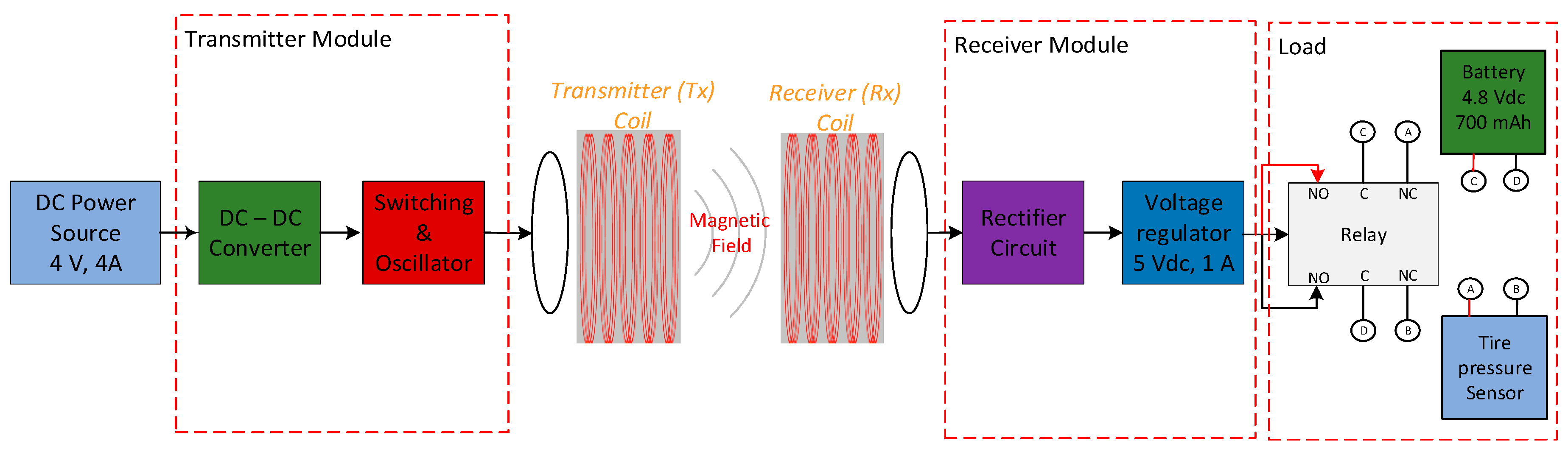
The proposed architecture design of the system is shown in
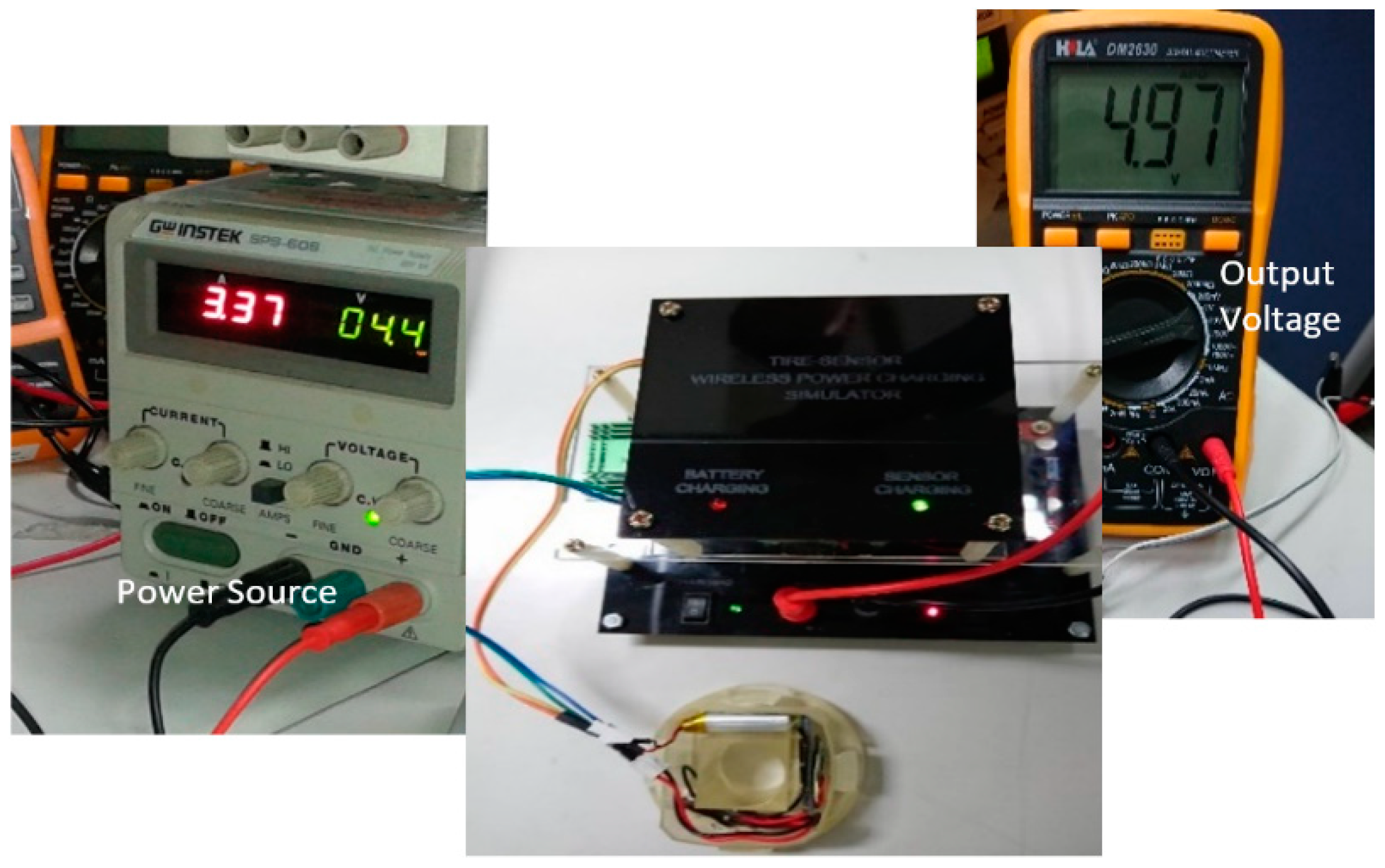
Figure 2. It is based on inductive electromagnetic coupling. In the proposed system, the transmitter module is the primary circuit including a DC-DC converter module, the transmitter circuit and the transmitter coil, while the receiver includes the receiver coil and secondary circuit (rectifier and voltage regulator circuits). The transmitter module transmits energy to the tire pressure sensor module through the receiver coil and receiver module. The receiving voltage signal is converted to a stable output voltage of 5 V and a current maximum of 850 Amp by rectifier and voltage regulator circuits. As described in
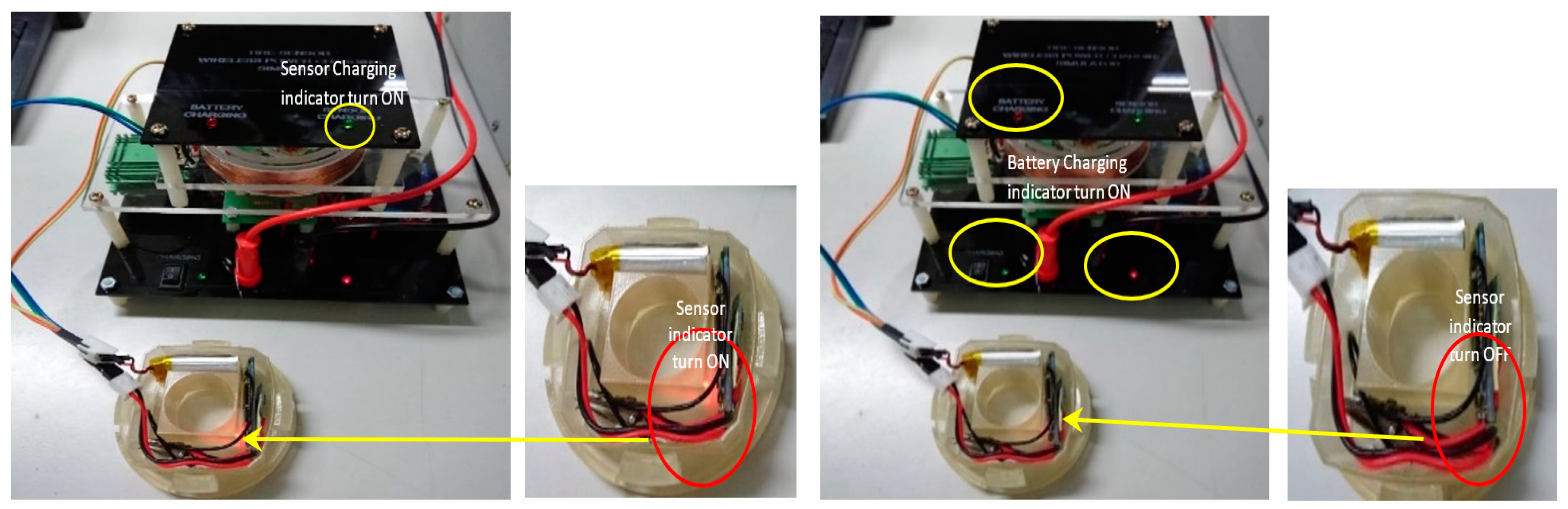
Figure 2, the output receiver module is coupled with the tire pressure sensor module through the relay switch. The relay switch changes over the connection between the battery to charger system and the battery to pressure sensor. When the charger system does not work (it does not transfer power), the normally closed contact relay connects the battery to the pressure sensor. In this state, the pressure sensor work (sensing the tire air pressure) and is powered by the battery. While, if the charger system works, the energy from the DC power source is transmitted wirelessly to the receiver module and then the relay is energized to change over relay switch from the sensor charging mode (battery and pressure sensor connected) to the battery charging mode (the battery and charger system connected). At the same time, the charging system recharges the battery power, and the air pressure sensor stops working. In a real operating environment, this prototype can work together with the TPMS module and a control system. Whenever the TPMS detects the tire pressure sensor battery critical condition, a control system will turn ON the wireless power charging of tire pressure sensor to transmit power from the transmitter module to the load (the battery of tire pressure sensor) through the receiver module.
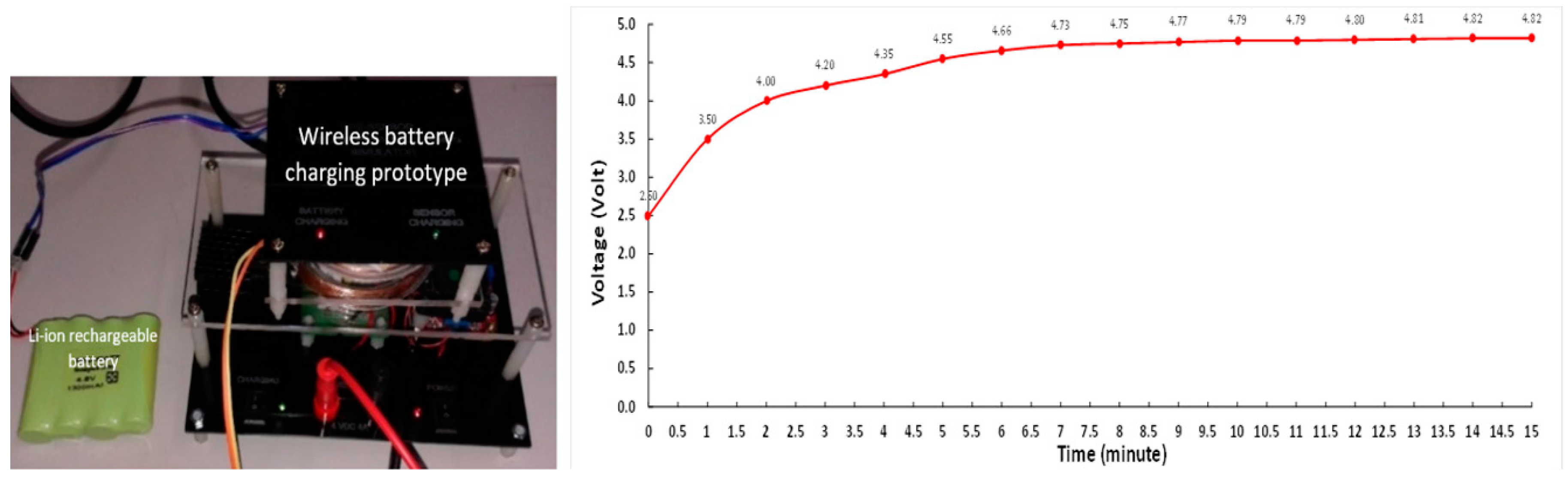
In this research work, the primary circuit, the secondary circuit, and their coils were designed and assembled to meet the load requirements regarding the desired battery current and voltage, and the transmission distance range. The load target is 4.8 V 700 mAh Li-ion rechargeable battery. Actually, similar battery specifications can be considered, but were not used in this research work. In other words, the proposed system for wireless recharging purposes can be used for any battery-powered system that needs a maximum of voltage charger at 5 V.
2.4. Design and Implementation
2.4.1. Coil Design
In particular, the magnetic fields are critical in wireless power charging system coils design. The coil itself, self-inductance of the coil, and the mutual inductance of two coils give a significant contribution to produce the magnetic fields. Coil design must be considered at the first wireless power charging system design step to maximize the coupling coefficient between the two coils. Some of the aspects considered include; the coil geometry, the wire type and size, the number of wire windings, and the magnetic field produced by the two coils.
The electromagnetic properties of the primary and secondary coils must be strictly considered given the performance requirements of the proposed wireless power system. A spiral multilayer air core coil design is preferred to maximize the current (
i) × turns (
N) and the related magnetic field generated by the transmitter coil [
8]. The self-inductance of spiral multilayer air core coil can be described by Wheeler’s approximations formula [
19,
20]:
where
L is inductance in microHenries (µH),
N is a total number of turns,
r1 is a radius of the inner of a coil in meters,
r2 is a radius of the outer coil in meters, and
l is the length of the coil in meters.
An AWG 22 wire was chosen because of its small diameter (0.64 mm diameter and 0.0646 mm insulating layer) and can be used for carrying maximum current up to 7 Amperes. According to the calculations using Equation (12), in the case of a multilayer spiral coil having an inductance of 42.96 µH, and a wire diameter of 0.64 mm, the maximum number of wire windings and layers are 23 and 1.56, respectively. However, due to manual assembling, the transmitter coil is characterized by 2 layers and 20 turns (10 per layer), an outer diameter of 61.36 mm, an inner diameter of 60.0 mm, and 10 mm height. While the receiver coil was designed with the same diameter as the transmitter coil to maximize coupling efficiency. An AWG 28 wire was chosen in order to carry maximum current up to 2 Amperes of output voltage. In the case of a multilayer spiral coil having an inductance of 83.29 µH, and wire diameter of 0.32 mm, the maximum number of wire windings and layers are 29 and 1.67, respectively. In this implementation, the receiver coil is characterized by 2 layers and 24 turns (12 per layer), an outer diameter of 60.64 mm, an inner diameter of 60.0 mm, and 10 mm height because of manual manufacturing.
2.4.2. Transmitter and Receiver Modules Design
Once the fit coil design had been defined, a receiver and transmitter circuits were designed and implemented to fulfill the tire pressure sensor battery power requirements. The transmitter module generates power as a magnetic flux that induces the coil in the receiver module to enable the receiver circuit to collect the incoming power. The transmitter and receiver circuit for the wireless power transfer is shown in
Figure 4.
The oscillator circuit drives transmitter coil to transfer power from transmitter to receiver. The operating frequency can be described as:
where
C is the capacitance in Farad,
L is the coil inductance in Henry, and
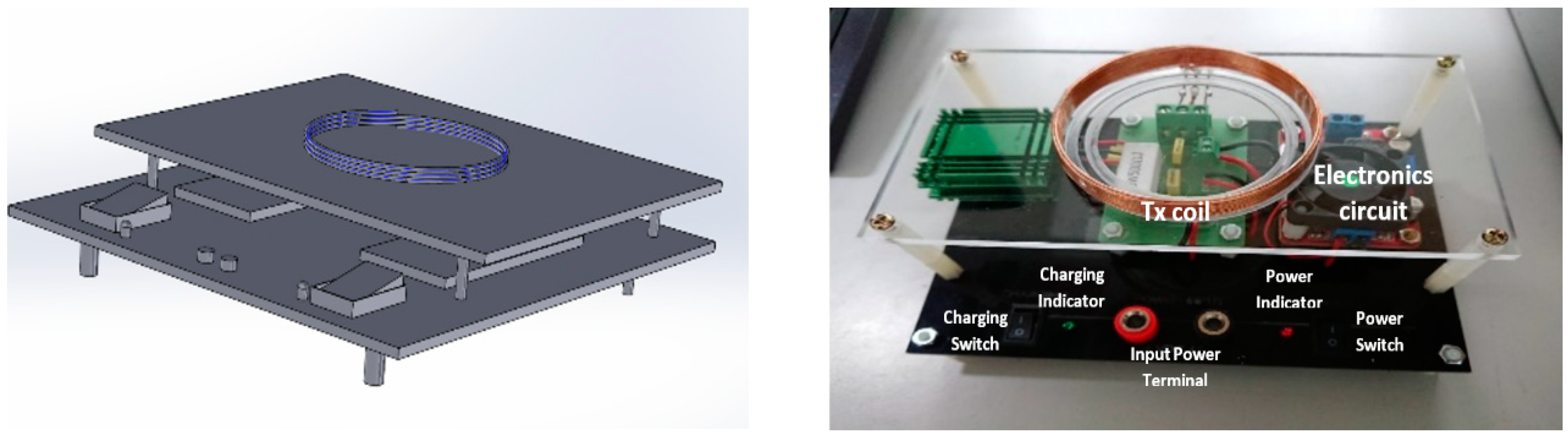
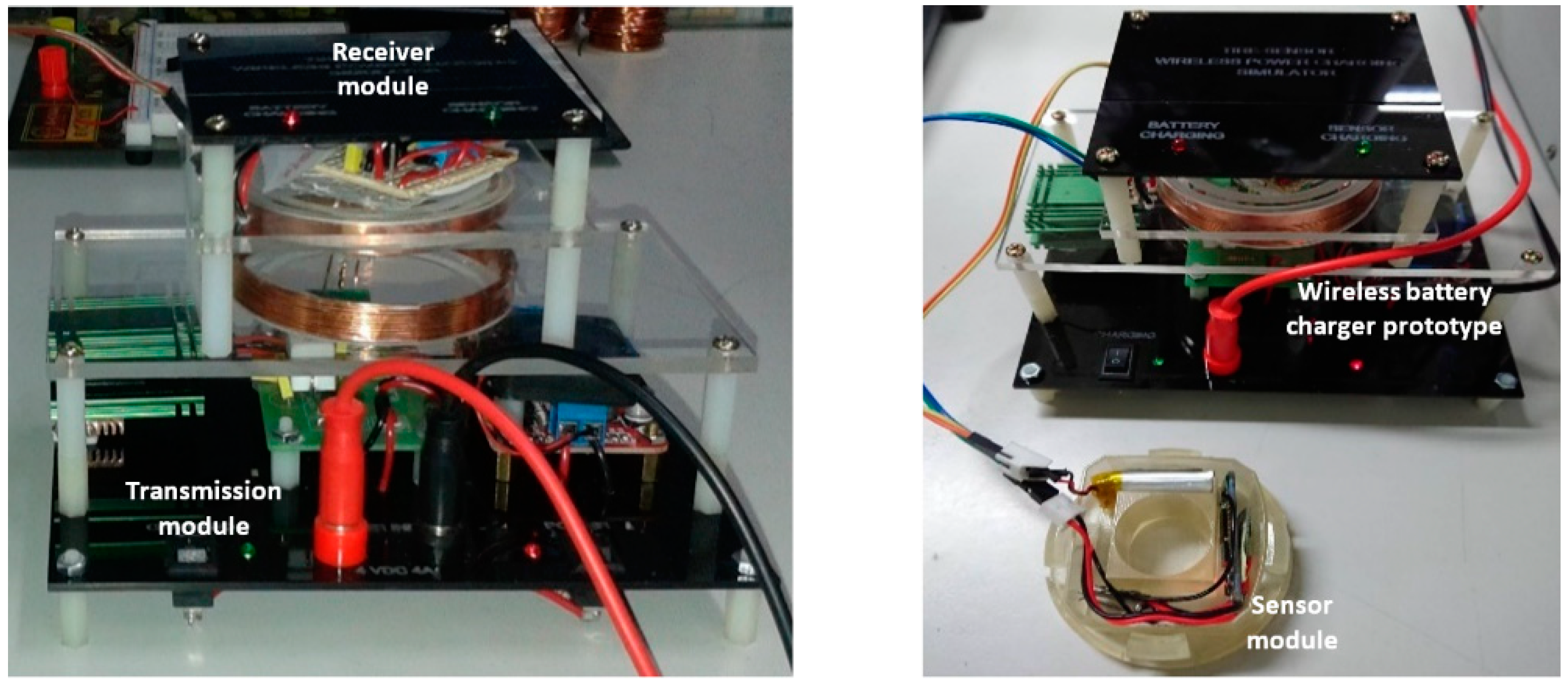
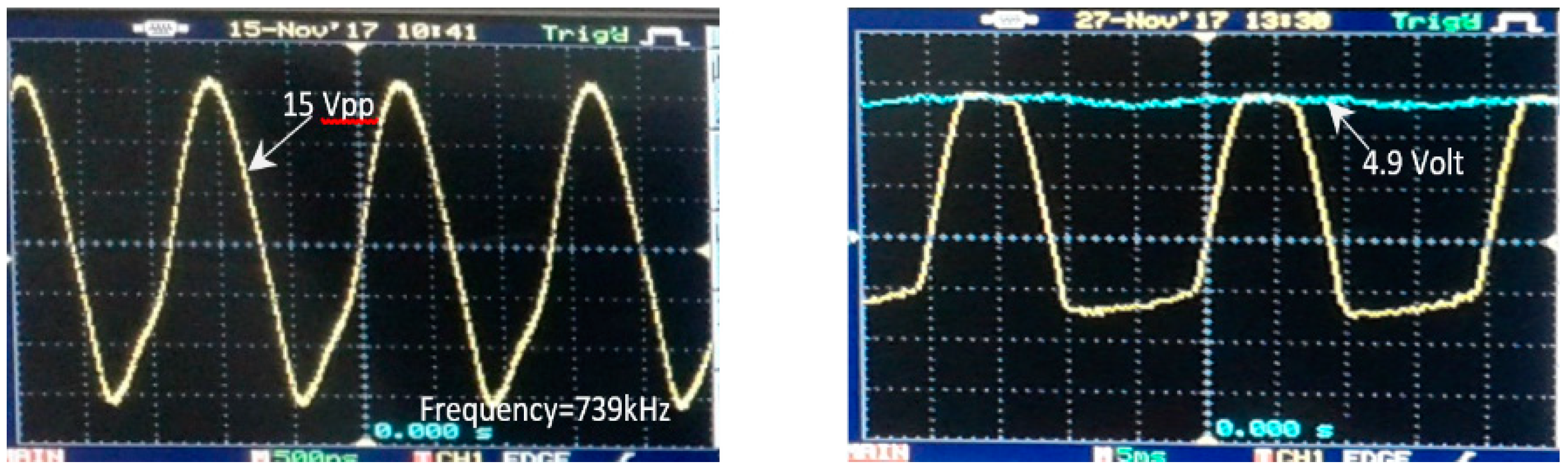
f is the oscillation frequency in Hertz. In this prototype design process, we have yet to follow any WPT application standard. The prototype was designed using the operating frequency not more than 1 MHz. This operating frequency was chosen because the transmitter module of the prototype applies a switching transistor that works at the maximum operating frequency of 1 MHz. Using transmitter coil inductance is defined above (42.96 µH) and the capacitor availability in the market, a 1 nF parallel capacitor was selected to achieve operating frequency at 739 kHz. The operating frequency was calculated according to Equation (13). In the next future research work, we will design our prototype based on the Wireless Power Consortium (WPC) standard. With regard to the WPC standard, in the middle range transmission (magnetic resonance method) WPT applications, the operating frequency has to be set at 6.7 MHz. The transmitter module implementation is shown in
Figure 5. The module is equipped with indicator lamps, power switch, charging switch, and power source terminals to support the module functionality.
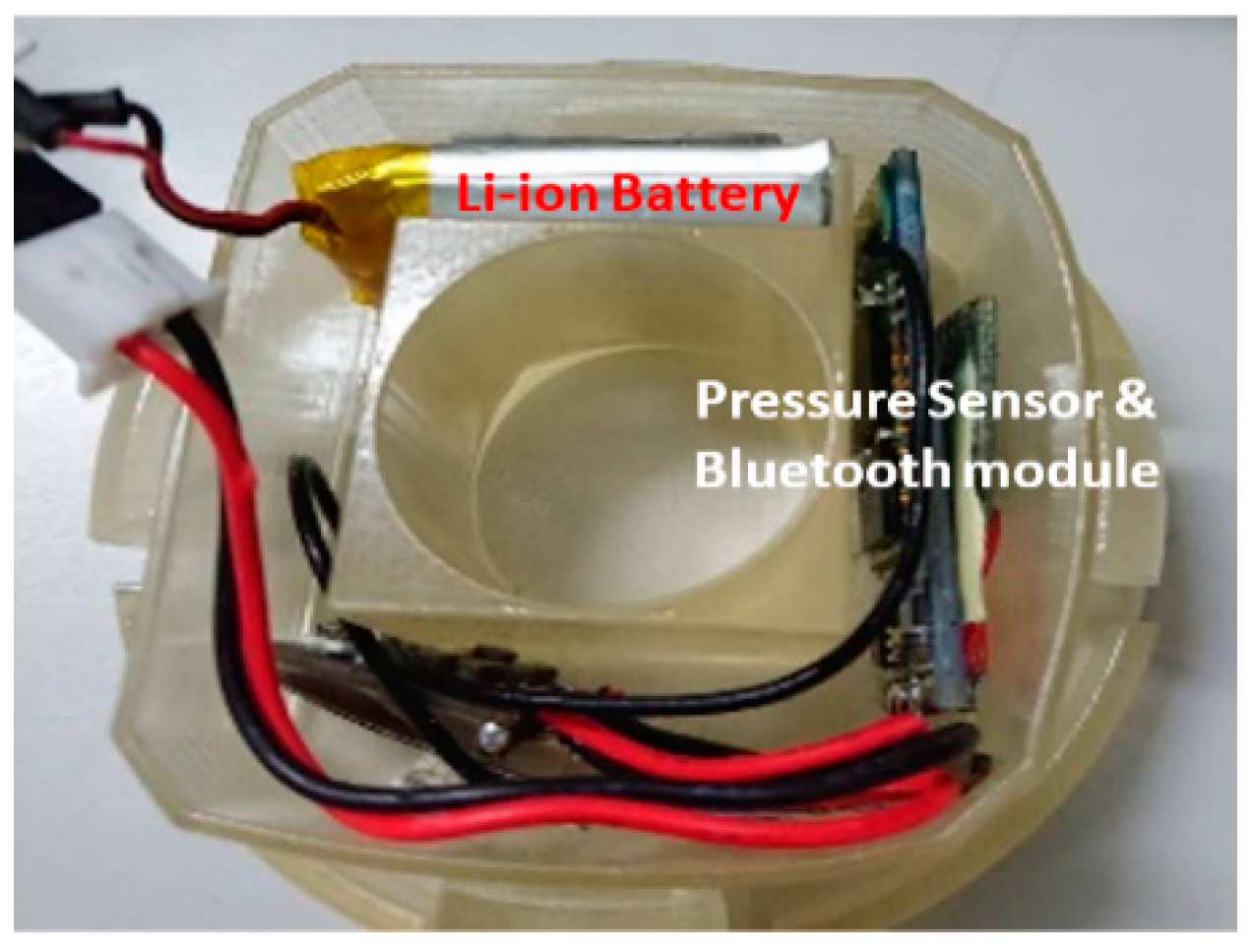
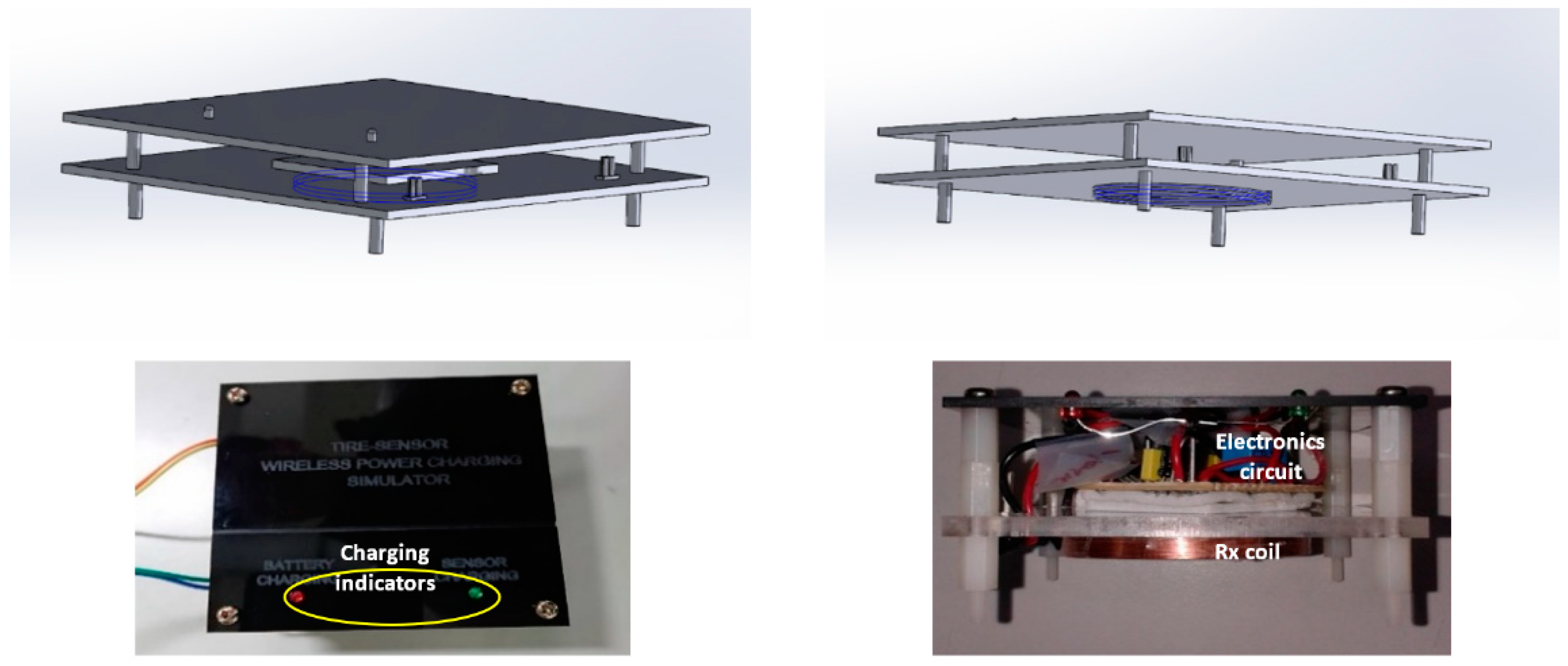
The transmitter module works with 4.4 V input voltage at maximum 3.3 A. While the implemented receiver module is shown in
Figure 6. The receiver module included with a rectifier circuit that has regulated output voltage of 5.0 V at a maximum current up to 850 mA.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}













