Multipotent Systems: Combining Planning, Self-Organization, and Reconfiguration in Modular Robot Ensembles


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (D1) Resource and engineering overhead: The amount of needed robots grows proportionally with the number of different tasks and use cases.
- (D2) Tradeoff between robustness or versatility: On the one hand, within heterogeneous systems, the heterogeneity in robots leads to reduced robustness against failures, i.e., if a specialized robot breaks down, it has to be replaced by an equivalently configured one. Homogeneous systems, on the other hand, are specialists in solving one dedicated task and cannot be used within others.
- (D4) Proprietary software solutions: In many projects, the software, i.e., the realized capabilities of the robot system, is developed for exactly the given use cases and the used set of hardware, e.g., [19,26,36]. Changes in the requirements or the used hardware usually entail high software engineering efforts. Systems with reconfigurable capabilities, however, are at the moment very restricted in their expandability [25] and development [37] or they act exclusively in a simulated environment [38].
A (physical) reconfiguration is a modification, applied to the existing hardware configuration of one (or multiple) robots (i.e., the set of attached actuators and sensors) which can result in a changed set of capabilities for that robot(s) due to the modified configuration(s).
Self-adaptive systems work in a top–down manner. They evaluate their own global behavior and change it when the evaluation indicates that they are not accomplishing what they were intended to do, or when better functionality or performance is possible. Such systems typically operate with an explicit internal representation of themselves and their global goals.
Self-organizing systems work bottom–up. They are composed of a large number of components that interact according to simple and local rules. The global behavior of the system emerges from these local interactions, and it is difficult to deduce the properties of the global system by studying only the local properties of its parts. Such systems do not use internal representations of global properties or goals; they are often inspired by biological or sociological phenomena.
2. Case Study and Its Challenges
3. Objectives
4. Architecture
4.1. Task Layer
4.1.1. HTN Definition for ScORe Tasks
4.1.2. ScORe mission Planning, Selection, and Activation
4.2. Ensemble Layer
4.2.1. Ensemble Programs as Implementation for Actions of the HTN
4.2.2. Executing Plans on Ensemble Layer
4.2.3. Robustness Through Redundancy and Reconfiguration
4.3. Agent Layer
4.3.1. Participating in SA–SO Mechanisms
4.3.2. Self-Awareness Supporting Physical Reconfiguration
4.4. Semantic Hardware Layer
4.4.1. Requirements and Blueprints
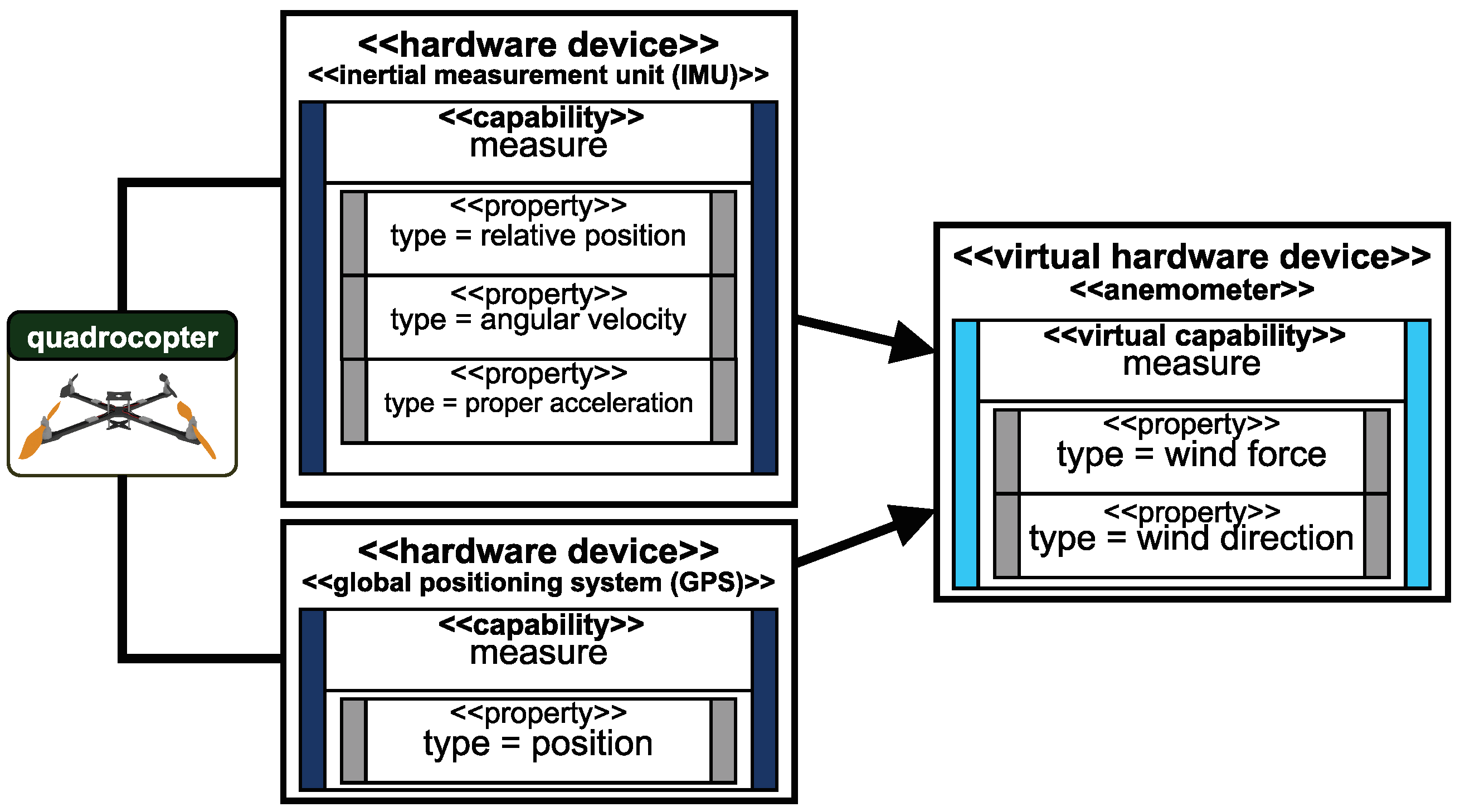
4.4.2. Capabilities and Properties
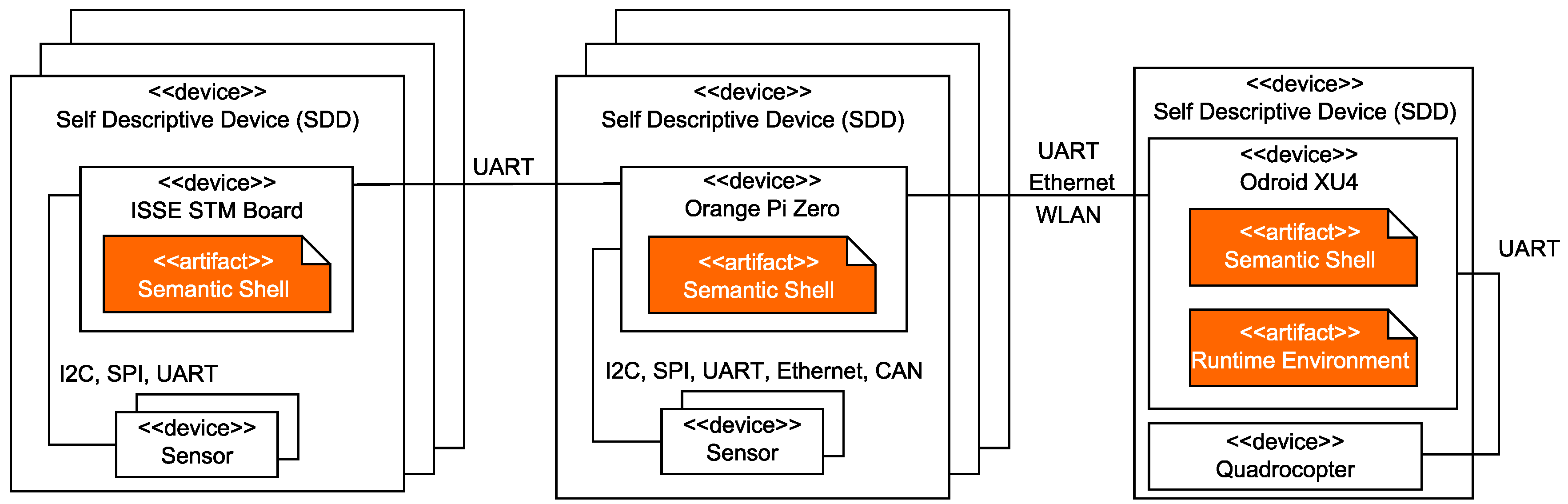
4.5. Self-Descriptive Devices
5. Proof of Concept and Preliminary Results
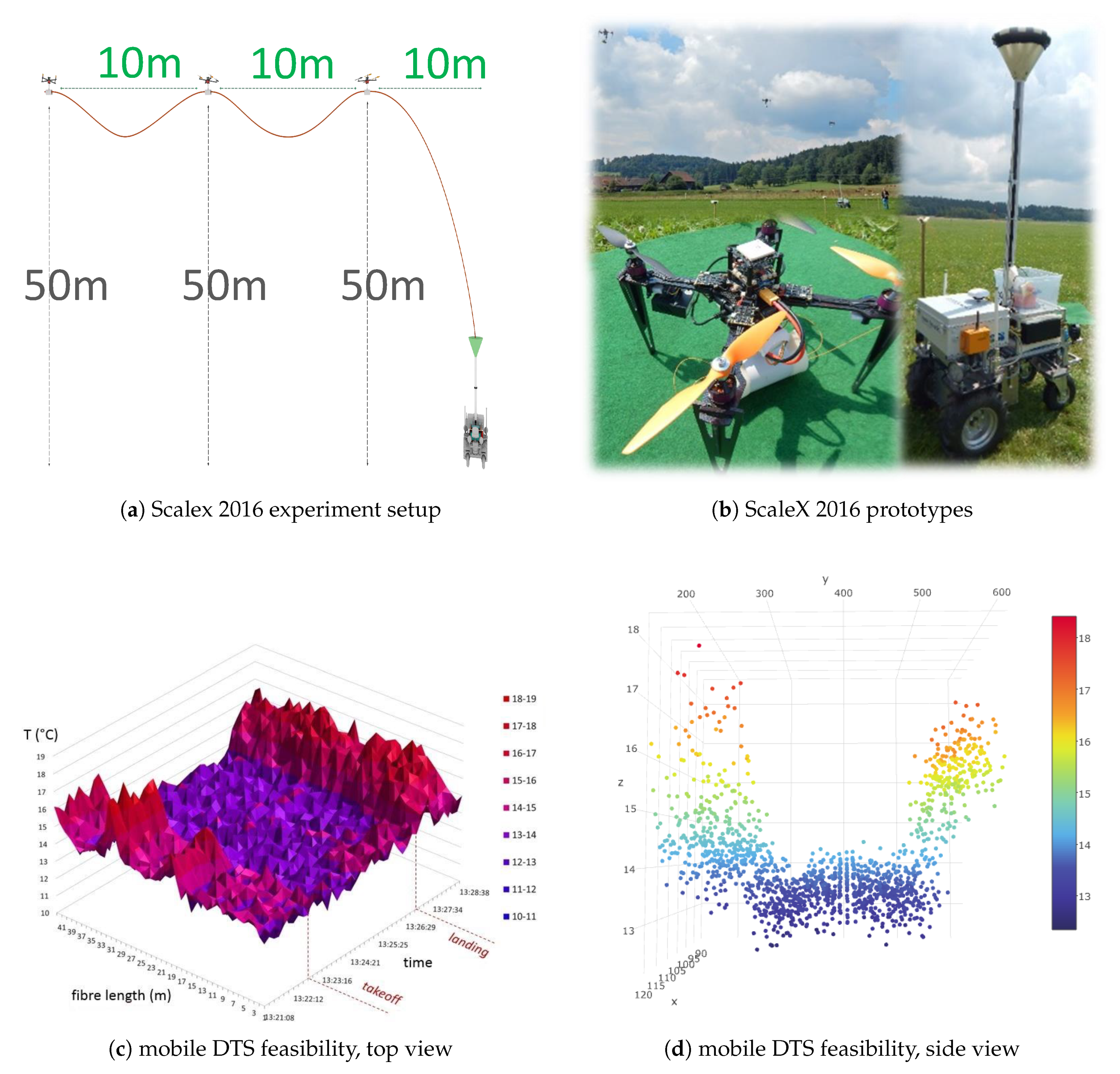
5.1. Executing ScORe Missions in the Context of Environmental Measurement
5.2. Integrating SA–SO Algorithms to Realize Multipotent Ensembles
5.2.1. Experiments in a Real-World Environment
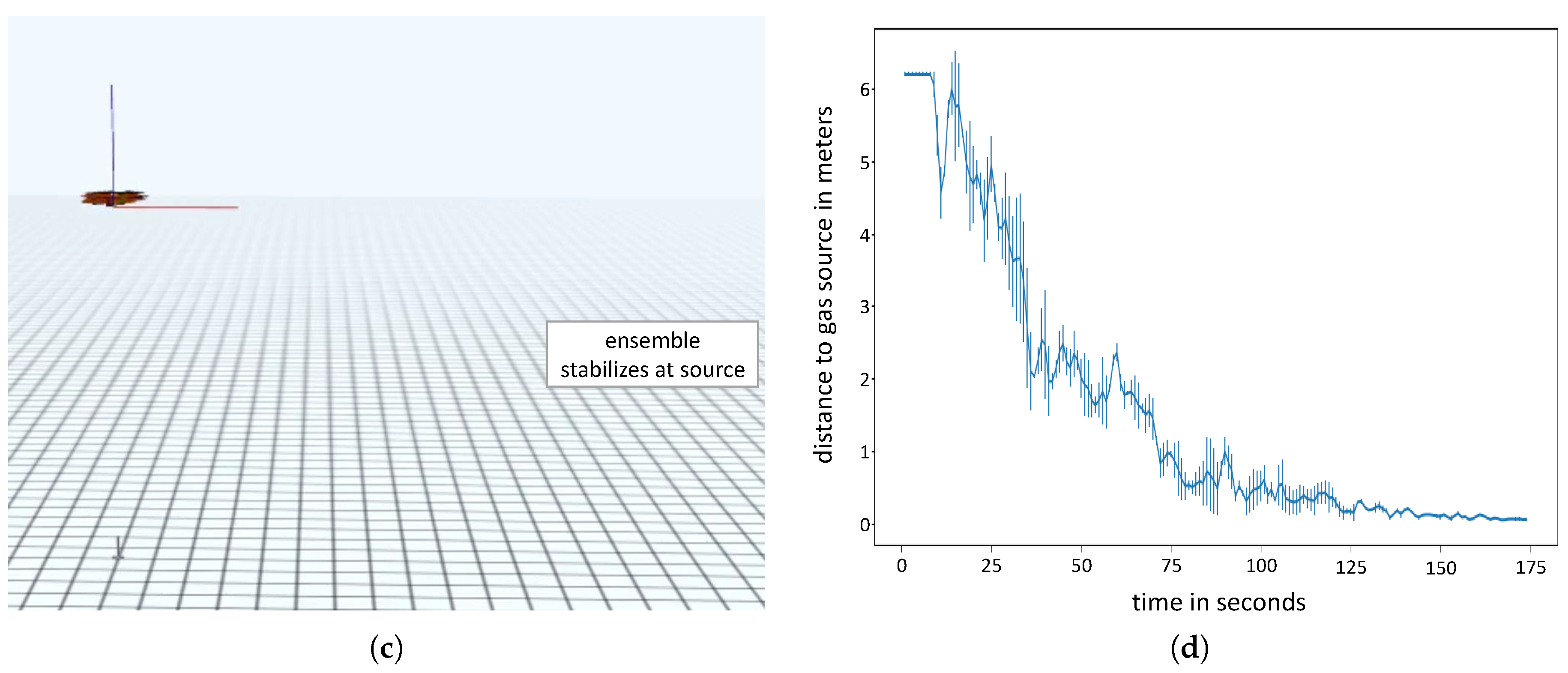
5.2.2. Experiments in a Simulation Environment
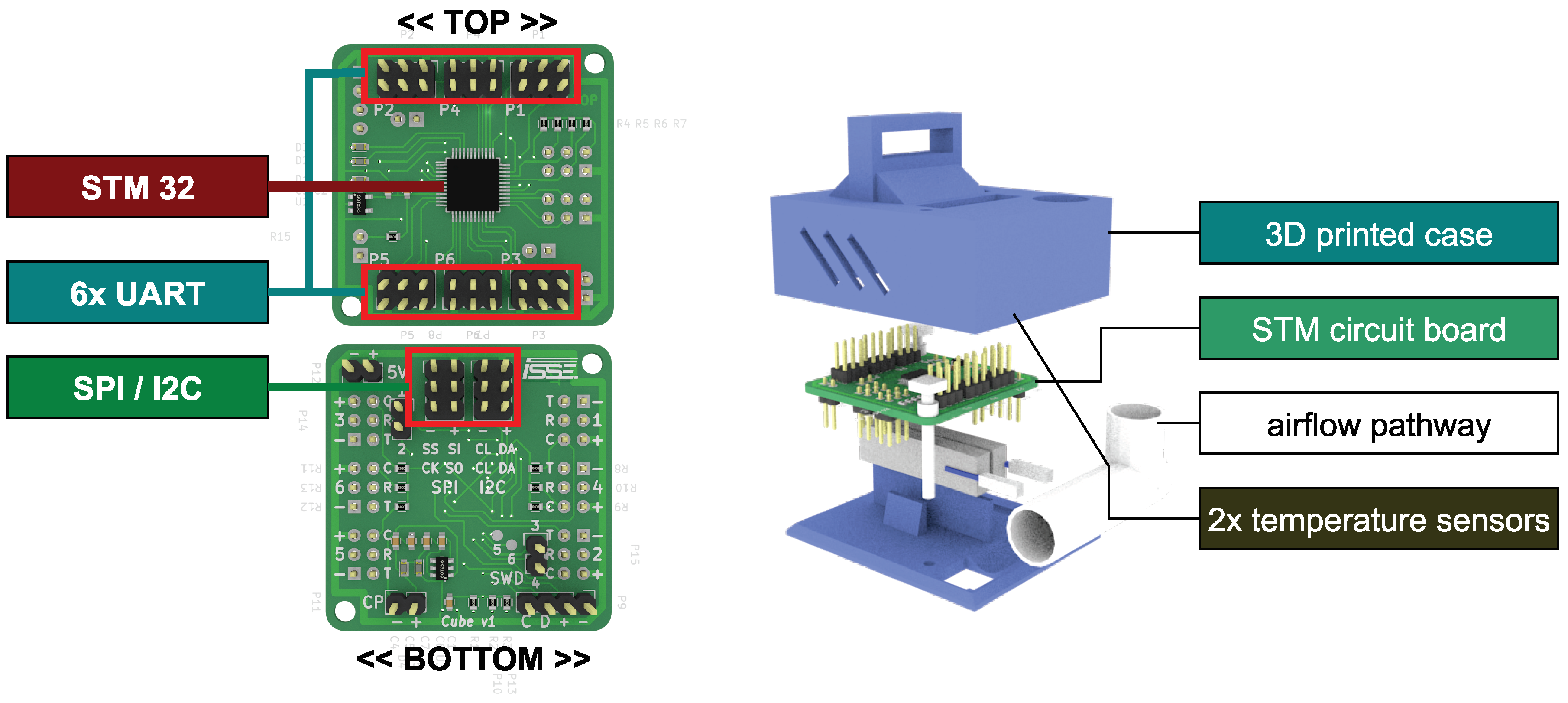
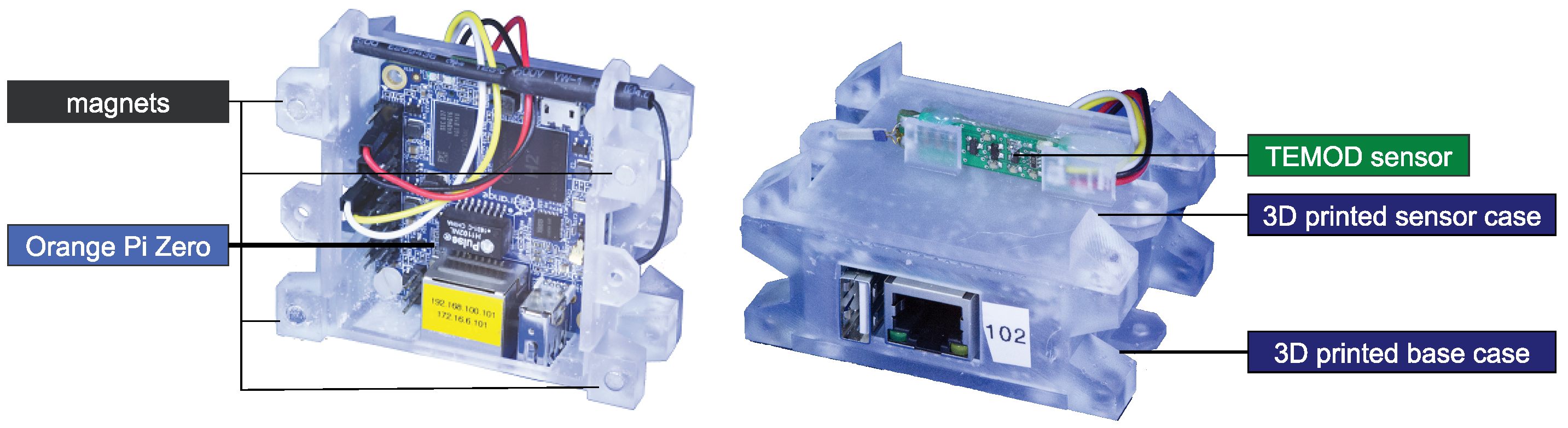
5.3. Practicability of Physical Reconfigurations with Modular Sensor Systems
- Physical interfaces to connect hardware, at least I2C, SPI, and UART;
- a common communication interface (e.g., Ethernet) with at least two IOs for daisy chaining;
- small form factor for the usage in combination also with a quadrocopter;
- sufficient performance for the scope of functions (e.g., to provide a runtime environment);
- persistent storage to store properties, capabilities and measured values at runtime.
6. Related Work
6.1. Task Definition and Planning
6.2. Task Scheduling, Allocation, and Execution
6.3. Knowledge Representation and Semantic Hardware Description
6.4. Related Case Studies
6.5. Conclusion on the State-of-the-Art
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| AAS | Asset administration shell |
| AGL | Above ground level |
| AI | Artificial intelligence |
| BASF | Badische Anilin und Soda Fabrik |
| BDI | Belief desire intention |
| CSOP | Constraint satisfaction (and optimization) problem |
| DTS | Distributed temperature sensing |
| HTN | Hierarchical task network |
| LTE | Long term evolution |
| MARA | Multiagent resource allocation problem |
| MAS | Multiagent system |
| MRTA | Multirobot task allocation problem |
| NBL | Nocturnal boundary layer |
| NP | Nondeterministic polynomial time |
| OPC-UA | Open platform communication-unified architecture |
| PDDL | Planning domain definition language |
| RAP | Resource allocation problem |
| ROS | Robot operating system |
| SA | Self-adaptation |
| SAR | Search an rescue |
| ScORe | Search (S), continuously Observe (cO), and React (Re) |
| SDD | Self-descriptive device |
| SO | Self-organization |
| TRANSFORMRS | Task and resource allocation strategy for multi robot systems |
| UAV | Unmanned aerial vehicle |
References
- Shields, C. The Oxford Handbook of Aristotle; Oxford University Press: Oxford, UK, 2012. [Google Scholar]
- Furley, D.; Cole, T. Democritus and the Sources of Greek Anthropology. J. Hell. Stud. 1970, 90, 239. [Google Scholar] [CrossRef]
- Nakamura, K. Thermoregulatory behavior and its central circuit mechanism—What thermosensory pathway drives it? Clin. Calcium 2018, 28, 65–72. [Google Scholar] [PubMed]
- Holland, R.A.; Waters, D.A.; Rayner, J.M. Echolocation signal structure in the Megachiropteran bat Rousettus aegyptiacus Geoffroy 1810. J. Exp. Biol. 2004, 207, 4361–4369. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Heiligenberg, W. Principles of Electrolocation and Jamming Avoidance in Electric Fish: A Neuroethological Approach; Springer Science & Business Media: Berlin, Germany, 2012; Volume 1. [Google Scholar]
- Willis, C.M.; Church, S.M.; Guest, C.M.; Cook, W.A.; McCarthy, N.; Bransbury, A.J.; Church, M.R.; Church, J.C. Olfactory detection of human bladder cancer by dogs: Proof of principle study. BMJ 2004, 329, 712. [Google Scholar] [CrossRef] [PubMed]
- Hoffmann, A.; Angerer, A.; Ortmeier, F.; Vistein, M.; Reif, W. Hiding Real-Time: A New Approach for the Software Development of Industrial Robots. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 2108–2113. [Google Scholar]
- Wang, R.H.; Sudhama, A.; Begum, M.; Huq, R.; Mihailidis, A. Robots to assist daily activities: Views of older adults with Alzheimer’s disease and their caregivers. Int. Psychogeriatr. 2017, 29, 67–79. [Google Scholar] [CrossRef] [PubMed]
- Hood, S.; Benson, K.; Hamod, P.; Madison, D.; O’Kane, J.M.; Rekleitis, I. Bird’s eye view: Cooperative exploration by UGV and UAV. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 247–255. [Google Scholar]
- Entrop, A.; Vasenev, A. Infrared drones in the construction industry: Designing a protocol for building thermography procedures. Energy Procedia 2017, 132, 63–68. [Google Scholar] [CrossRef]
- Murphy, R.R.; Tadokoro, S.; Nardi, D.; Jacoff, A.; Fiorini, P.; Choset, H.; Erkmen, A.M. Search and Rescue Robotics. In Handbook of Robotics; Siciliano, B., Khatib, O., Eds.; Springer: Berlin, Germany, 2008. [Google Scholar]
- Daniel, K.; Dusza, B.; Lewandowski, A.; Wietfelds, C. AirShield: A system-of-systems MUAV remote sensing architecture for disaster response. In Proceedings of the 3rd Annual IEEE Systems Conference (SysCon), Vancouver, BC, Canada, 23–26 March 2009. [Google Scholar]
- De Cubber, G.; Serrano, D.; Berns, K.; Chintamani, K.; Sabino, R.; Ourevitch, S.; Doroftei, D.; Armbrust, C.; Flamma, T.; Baudoin, Y. Search and rescue robots developed by the european icarus project. In Proceedings of the 7th International Workshop on Robotics for Risky Environments, Saint-Petersburg, Russia, 2–3 October 2013. [Google Scholar]
- Scherer, J.; Yahyanejad, S.; Hayat, S.; Yanmaz, E.; Andre, T.; Khan, A.; Vukadinovic, V.; Bettstetter, C.; Hellwagner, H.; Rinner, B. An Autonomous Multi-UAV System for Search and Rescue. In Proceedings of the First Workshop on Micro Aerial Vehicle Networks, Systems, and Applications for Civilian Use, Florence, Italy, 18 May 2015; pp. 33–38. [Google Scholar]
- Martinez, C.; Sampedro, C.; Chauhan, A.; Campoy, P. Towards autonomous detection and tracking of electric towers for aerial power line inspection. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014; pp. 284–295. [Google Scholar]
- Matikainen, L.; Lehtomäki, M.; Ahokas, E.; Hyyppä, J.; Karjalainen, M.; Jaakkola, A.; Kukko, A.; Heinonen, T. Remote sensing methods for power line corridor surveys. ISPRS J. Photogramm. Remote Sens. 2016, 119, 10–31. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, L.; Wang, B.; Chen, X.; Wang, Q.; Zheng, T. High Speed Automatic Power Line Detection and Tracking for a UAV-Based Inspection. In Proceedings of the 2012 International Conference on Industrial Control and Electronics Engineering, Xi’an, China, 23–25 August 2012; pp. 266–269. [Google Scholar]
- Duarte, M.; Costa, V.; Gomes, J.; Rodrigues, T.; Silva, F.; Oliveira, S.M.; Christensen, A.L. Evolution of Collective Behaviors for a Real Swarm of Aquatic Surface Robots. PLoS ONE 2016, 11, e0151834. [Google Scholar] [CrossRef] [PubMed]
- Thenius, R.; Moser, D.; Kernbach, S.; Kuksin, I.; Kernbach, O.; Elena Kuksina, E.; Miśković, N.; Bogdan, S.; Petrović, T.; Babić, A.; et al. subCLUTron: A learning, self-regulating, self-sustaining underwater society/culture of robots. In Proceedings of the EMRA’16: Workshop on EU-funded Marine Robotics and Applications, Newcastle, UK, 14–15 June 2016. [Google Scholar]
- Wolf, B.; Chwala, C.; Fersch, B.; Garvelmann, J.; Junkermann, W.; Zeeman, M.J.; Angerer, A.; Adler, B.; Beck, C.; Brosy, C.; et al. The SCALEX Campaign: Scale-Crossing Land Surface and Boundary Layer Processes in the TERENO-preAlpine Observatory. Bul. Am. Meteorol. Soc. 2017, 98, 1217–1234. [Google Scholar] [CrossRef]
- Ed Durfree, S.Z. Multiagent Planning, Control, and Execution; MIT Press: Cambridge, MA, USA, 2013; Chapter 11; pp. 485–545. [Google Scholar]
- Gross, R.; Dorigo, M. Towards group transport by swarms of robots. Int. J. Bio-Inspir. Comput. 2009, 1, 1–13. [Google Scholar] [CrossRef]
- Dorigo, M.; Floreano, D.; Gambardella, L.M.; Mondada, F.; Nolfi, S.; Baaboura, T.; Birattari, M.; Bonani, M.; Brambilla, M.; Brutschy, A.; et al. Swarmanoid: A Novel Concept for the Study of Heterogeneous Robotic Swarms. IEEE RAM 2013, 20, 60–71. [Google Scholar] [CrossRef]
- Goldstein, J. Emergence as a Construct: History and Issues. Emergence 1999, 1, 49–72. [Google Scholar] [CrossRef]
- Gross, M.D.; Veitch, C. Beyond top down: Designing with cubelets. Tecnologias Sociedade e Conhecimento 2013, 1, 150–164. [Google Scholar]
- Romanishin, J.W.; Gilpin, K.; Rus, D. M-blocks: Momentum-driven, magnetic modular robots. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 4288–4295. [Google Scholar]
- Cao, Y.; Leng, Y.; Sun, J.; Zhang, Y.; Ge, W. 360botG2—An improved unit of mobile self-assembling modular robotic system aiming at exploration in real world. In Proceedings of the IEEE 41st Annual Conference of the Industrial Electronics Society, Yokohama, Japan, 9–12 November 2015; pp. 1716–1722. [Google Scholar]
- Barreiro, J.; Boyce, M.; Do, M.; Frank, J.; Iatauro, M.; Kichkaylo, T.; Morris, P.; Ong, J.; Remolina, E.; Smith, T.; et al. EUROPA: A platform for AI planning, scheduling, constraint programming, and optimization. In Proceedings of the 4th International Competition on Knowledge Engineering for Planning and Scheduling (ICKEPS), Sao Paulo, Brazil, 25–29 June 2012. [Google Scholar]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef]
- Berrahal, S.; Kim, J.H.; Rekhis, S.; Boudriga, N.; Wilkins, D.; Acevedo, J. Border Surveillance Monitoring Using Quadcopter UAV-Aided Wireless Sensor Networks. J. Commun. Softw. Syst. 2016, 12, 67–82. [Google Scholar] [CrossRef]
- Kosak, O.; Wanninger, C.; Angerer, A.; Hoffmann, A.; Schiendorfer, A.; Seebach, H. Towards Self-Organizing Swarms of Reconfigurable Self-Aware Robots. In Proceedings of the IEEE 1st International Workshops on Foundations and Applications of Self Systems, Augsburg, Germany, 12–16 September 2016; pp. 204–209. [Google Scholar]
- Kosak, O. Facilitating Planning by Using Self-Organization. In Proceedings of the 2017 IEEE 2nd International Workshops on Foundations and Applications of Self* Systems (FAS*W), Tucson, AZ, USA, 18–22 September 2017; pp. 371–374. [Google Scholar]
- Dorigo, M.; Tuci, E.; Groß, R.; Trianni, V.; Labella, T.H.; Nouyan, S.; Ampatzis, C.; Deneubourg, J.L.; Baldassarre, G.; Nolfi, S.; et al. The swarm-bots project. In International Workshop on Swarm Robotics; Springer: Berlin, Germany, 2004; pp. 31–44. [Google Scholar]
- Erol, K.; Hendler, J.; Nau, D.S. HTN Planning: Complexity and Expressivity; AAAI: Menlo Park, CA, USA, 1994; Volume 94, pp. 1123–1128. [Google Scholar]
- Gerkey, B.P.; Matarić, M.J. A formal analysis and taxonomy of task allocation in multi-robot systems. Int. J. Robot. Res. 2004, 23, 939–954. [Google Scholar] [CrossRef]
- Flushing, E.F.; Gambardella, L.M.; Caro, G.A.D. A mathematical programming approach to collaborative missions with heterogeneous teams. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 396–403. [Google Scholar]
- TinkerForge. Available online: https://www.tinkerforge.com/de/ (accessed on 18 December 2018).
- Borgo, S.; Cesta, A.; Orlandini, A.; Rasconi, R.; Suriano, M.; Umbrico, A. Towards a cooperative knowledge-based control agent for a reconfigurable manufacturing plant. In Proceedings of the 2014 IEEE Emerging Technology and Factory Automation (ETFA), Barcelona, Spain, 16–19 September 2014; pp. 1–8. [Google Scholar]
- Schmickl, T.; Thenius, R.; Moslinger, C.; Timmis, J.; Tyrrell, A.; Read, M.; Hilder, J.; Halloy, J.; Campo, A.; Stefanini, C.; et al. CoCoRo–The Self-Aware Underwater Swarm. In Proceedings of the 2011 Fifth IEEE Conference on Self-Adaptive and Self-Organizing Systems Workshops, Ann Arbor, MI, USA, 3–7 October 2011; pp. 120–126. [Google Scholar]
- Giorgetti, A.; Marchetto, M.C.; Li, M.; Yu, D.; Fazzina, R.; Mu, Y.; Adamo, A.; Paramonov, I.; Cardoso, J.C.; Monasterio, M.B.; et al. Cord blood-derived neuronal cells by ectopic expression of Sox2 and c-Myc. Proc. Natl. Acad. Sci. USA 2012, 109, 12556–12561. [Google Scholar] [CrossRef] [Green Version]
- Kosak, O. A Decentralised Swarm Approach for Mobile Robot-Systems. In Organic Computing: Doctoral Dissertation Colloquium 2015; Kassel University Press GmbH: Kassel, Germany, 2015; Volume 7, p. 53. [Google Scholar]
- Ghallab, M.; Nau, D.; Traverso, P. Automated Planning: Theory & Practice; Elsevier: Amsterdam, The Netherlands, 2004. [Google Scholar]
- First IEEE International Conference on Self-Adaptive and Self-Organizing Systems (SASO 2007). Boston, MA, USA, 9–11 July 2007; Available online: http://projects.csail.mit.edu/saso2007/ (accessed on 18 December 2018).
- CNBC. BASF Faces Prolonged Shut-Down After Chemical Site Explosion. Available online: https://www.bloomberg.com/news/articles/2016-10-17/basf-reports-explosion-at-its-biggest-site-in-ludwigshafen (accessed on 18 December 2018).
- CNBC. Chemical Plant Explosion Thrusts Arkema into Spotlight. Available online: https://www.cnbc.com/2017/09/02/chemical-plant-explosion-thrusts-arkema-into-spotlight.html (accessed on 18 December 2018).
- Euronews. Eight Injured in German Oil Refinery Explosion. Available online: https://www.euronews.com/2018/09/01/eight-injured-in-german-oil-refinery-explosion (accessed on 18 December 2018).
- Hanke, J.; Kosak, O.; Schiendorfer, A.; Reif, W. Self-organized Resource Allocation for Reconfigurable Robot Ensembles. In Proceedings of the IEEE 12th International Conference on Self-Adaptive and Self-Organizing Systems, Trento, Italy, 3–7 September 2018. [Google Scholar]
- Marconi, L.; Leutenegger, S.; Lynen, S.; Burri, M.; Naldi, R.; Melchiorri, C. Ground and aerial robots as an aid to alpine search and rescue: Initial sherpa outcomes. In Proceedings of the 2013 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Linkoping, Sweden, 21–26 October 2013; pp. 1–2. [Google Scholar]
- Brambilla, M.; Ferrante, E.; Birattari, M.; Dorigo, M. Swarm robotics: A review from the swarm engineering perspective. Swarm Intell. 2013, 7, 1–41. [Google Scholar] [CrossRef]
- Vásárhelyi, G.; Virágh, C.; Somorjai, G.; Tarcai, N.; Szörényi, T.; Nepusz, T.; Vicsek, T. Outdoor flocking and formation flight with autonomous aerial robots. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 3866–3873. [Google Scholar]
- Rubenstein, M.; Cornejo, A.; Nagpal, R. Programmable self-assembly in a thousand-robot swarm. Science 2014, 345, 795–799. [Google Scholar] [CrossRef]
- Preece, A.; Gomez, M.; de Mel, G.; Vasconcelos, W.; Sleeman, D.; Colley, S.; Pearson, G.; Pham, T.; La Porta, T. Matching sensors to missions using a knowledge-based approach. Proc. SPIE 2008, 6981, 698109. [Google Scholar]
- Braubach, L.; Pokahr, A. Developing distributed systems with active components and Jadex. Scalable Comput. Pract. Exp. 2012, 13, 100–120. [Google Scholar]
- Georgievski, I.; Aiello, M. An Overview of Hierarchical Task Network Planning. arXiv 2014, arXiv:1403.7426. [Google Scholar]
- Magnenat, S.; Voelkle, M.; Mondada, F. Planner9, a HTN planner distributed on groups of miniature mobile robots. In Proceedings of the International Conference on Intelligent Robotics and Applications (ICIRA 2009), Singapore, 16–18 December 2009. [Google Scholar] [CrossRef]
- Koenig, S. Agent-centered search. AI Mag. 2001, 22, 109. [Google Scholar]
- Nissim, R.; Brafman, R.I.; Domshlak, C. A General, Fully Distributed Multi-agent Planning Algorithm. In Proceedings of the 9th International Conference on Autonomous Agents and Multiagent Systems, Toronto, ON, Canada, 10–14 May 2010; pp. 1323–1330. [Google Scholar]
- Obst, O.; Boedecker, J. Flexible Coordination of Multiagent Team Behavior Using HTN Planning. In RoboCup 2005: Robot Soccer World Cup IX; Bredenfeld, A., Jacoff, A., Noda, I., Takahashi, Y., Eds.; Springer: Berlin/Heidelberg, Germany, 2006; pp. 521–528. [Google Scholar]
- Brenner, M.; Nebel, B. Continual planning and acting in dynamic multiagent environments. Auton. Agents Multi-Agent Syst. 2009, 19, 297–331. [Google Scholar] [CrossRef] [Green Version]
- Elkawkagy, M.; Biundo, S. Hybrid Multi-agent Planning. In Proceedings of the 9th German Conference on Multiagent System Technologies (MATES 2011), Berlin, Germany, 6–7 October 2011; Klügl, F., Ossowski, S., Eds.; Springer: Berlin/Heidelberg, Germany, 2011; pp. 16–28. [Google Scholar]
- Pianini, D.; Viroli, M.; Beal, J. Protelis: Practical Aggregate Programming. In Proceedings of the 30th Annual ACM Symposium on Applied Computing, Salamanca, Spain, 13–17 April 2015; pp. 1846–1853. [Google Scholar]
- Gharehchopogh, F.S.; Arjang, H. A Survey and Taxonomy of Leader Election Algorithms in Distributed Systems. Indian J. Sci. Technol. 2014, 7, 815. [Google Scholar]
- Zhang, Y.; Wang, S.; Ji, G. A comprehensive survey on particle swarm optimization algorithm and its applications. Math. Probl. Eng. 2015, 2015, 931256. [Google Scholar] [CrossRef]
- Koren, Y.; Borenstein, J. Potential field methods and their inherent limitations for mobile robot navigation. In Proceedings of the 1991 IEEE International Conference on Robotics and Automation, Sacramento, CA, USA, 9–11 April 1991; pp. 1398–1404. [Google Scholar]
- Shehory, O.; Kraus, S. Methods for task allocation via agent coalition formation. Art. Intell. 1998, 101, 165–200. [Google Scholar] [CrossRef]
- Kosak, O.; Wanninger, C.; Angerer, A.; Hoffmann, A.; Schierl, A.; Seebach, H. Decentralized Coordination of Heterogeneous Ensembles Using Jadex. In Proceedings of the 2016 IEEE 1st International Workshops on Foundations and Applications of Self* Systems (FAS*W), Augsburg, Germany, 12–16 September 2016; pp. 271–272. [Google Scholar]
- Chevaleyre, Y.; Dunne, P.E.; Endriss, U.; Lang, J.; Lemaitre, M.; Maudet, N.; Padget, J.; Phelps, S.; Rodriguez-Aguilar, J.A.; Sousa, P. Issues in multiagent resource allocation. Informatica 2006, 30, 3–31. [Google Scholar]
- Kosak, O.; Anders, G.; Siefert, F.; Reif, W. An Approach to Robust Resource Allocation in Large-Scale Systems of Systems. In Proceedings of the Self-Adaptive and Self-Organizing Systems (SASO), Cambridge, MA, USA, 21–25 September 2015; pp. 1–10. [Google Scholar]
- Eymüller, C.; Wanninger, C.; Hoffmann, A.; Reif, W. Semantic Plug and Play—Self-Descriptive Modular Hardware for Robotic Applications. Int. J. Semant. Comput. 2017, 12, 559–577. [Google Scholar] [CrossRef]
- Wanninger, C.; Eymüller, C.; Hoffmann, A.; Kosak, O.; Reif, W. Synthesising Capabilities for Collective Adaptive Systems from Self-Descriptive Hardware Devices—Bridging the Reality Gap. In Proceedings of the 8th International Symposium On Leveraging Applications of Formal Methods, Verification and Validation, Limassol, Cyprus, 30 October–13 November 2018. [Google Scholar]
- Palomaki, R.T.; Rose, N.T.; van den Bossche, M.; Sherman, T.J.; De Wekker, S.F. Wind estimation in the lower atmosphere using multirotor aircraft. J. Atmos. Ocean. Technol. 2017, 34, 1183–1191. [Google Scholar] [CrossRef]
- Plattform Industrie 4.0. Structure of the Administration Shell. Available online: https://www.plattform-i40.de/I40/Redaktion/EN/Downloads/Publikation/structure-of-the-administration-shell.html (accessed on 18 December 2018).
- Quigley, M.; Conley, K.; Gerkey, B.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A.Y. ROS: An Open-Source Robot Operating System. In Proceedings of the ICRA Workshop on Open Source Software, Kobe, Japan, 12–17 May 2009; Volume 3, p. 5. [Google Scholar]
- Vistein, M.; Angerer, A.; Hoffmann, A.; Schierl, A.; Reif, W. Flexible and Continuous Execution of Real-Time Critical Robotic Tasks. Int. J. Mechatron. Autom. 2014, 4, 27–38. [Google Scholar] [CrossRef]
- Angerer, A.; Hoffmann, A.; Schierl, A.; Vistein, M.; Reif, W. Robotics API: Object-oriented software development for industrial robots. J. Softw. Eng. Robot. 2013, 4, 1–22. [Google Scholar]
- Berners-Lee, T.; Hendler, J.; Lassila, O. The semantic web. Sci. Am. 2001, 284, 28–37. [Google Scholar] [CrossRef]
- KIT IMK/IFU, G.P. ScaleX. Available online: https://scalex.imk-ifu.kit.edu/ (accessed on 18 December 2018).
- ISSELabs. Flying Robot Ensemble in Action at the ScaleX 2016 Geographic Measurement Campaign. Available online: https://youtu.be/MWNyUymtNSs (accessed on 18 December 2018).
- Sensornet. Oryx DTS Sensors. Available online: https://www.sensornet.co.uk/oryx-dts-sensors/ (accessed on 18 December 2018).
- Sensornet. Distributed Temperature Sensing Systems & DTS Monitoring Sensors. Available online: https://www.sensornet.co.uk/distributed-temperature-sensing/ (accessed on 18 December 2018).
- Rosewhite. Available online: https://www.rosewhite.de/ (accessed on 18 December 2018).
- Autoquad. Autoquad—Autonomous Multi Rotor Vehicle Controller. Available online: http://autoquad.org/ (accessed on 18 December 2018).
- Odroid XU 4. Available online: https://magazine.odroid.com/wp-content/uploads/odroid-xu4-user-manual.pdf (accessed on 18 December 2018).
- Robotics, I. Innok Heros Modular Versatile Robot System. Available online: https://www.innok-robotics.de/en/products/heros (accessed on 18 December 2018).
- ISSELabs. SASO 2016—Decentralized Coordination of Heterogeneous Ensembles Using Jadex. Available online: https://youtu.be/G8JHShUlQY0 (accessed on 18 December 2018).
- VICON. Vicon Object Tracking. Available online: https://www.vicon.com/motion-capture/engineering (accessed on 15 November 2018).
- KUKA. KUKA Youbot. Available online: https://spectrum.ieee.org/automaton/robotics/industrial-robots/scoop-kukas-youbot (accessed on 15 November 2018).
- OrangePiZero Website. Available online: http://www.orangepi.org/orangepizero/ (accessed on 18 December 2018).
- TEMOD. Available online: https://www.mikrocontroller.net/attachment/46744/I2C_Temperaturmodul_DBD.pdf (accessed on 18 December 2018).
- Russel, S.J.; Norvig, P. Artificial Intelligence: A Modern Approach, 3rd ed.; Pearson: Harlow, UK, 2014; pp. 373–407. [Google Scholar]
- Gerevini, A.; Long, D. Preferences and soft constraints in PDDL3. In Proceedings of the ICAPS Workshop on Planning with Preferences and Soft Constraints, Glasgow, UK, 6 June 2006; pp. 46–53. [Google Scholar]
- Newell, A.; Shaw, J.C.; Simon, H.A. Human Problem Solving; Prentice-Hall Englewood Cliffs: Upper Saddle River, NJ, USA, 1959; Volume 104, pp. 102–114. [Google Scholar]
- Bonet, B.; Geffner, H. Planning as heuristic search. Art. Intell. 2001, 129, 5–33. [Google Scholar] [CrossRef]
- Fink*, E.; Blythe, J. Prodigy bidirectional planning. J. Exp. Theor. Art. Intell. 2005, 17, 161–200. [Google Scholar] [CrossRef] [Green Version]
- Blum, A.L.; Furst, M.L. Fast planning through planning graph analysis. Art. Intell. 1997, 90, 281–300. [Google Scholar] [CrossRef]
- Kautz, H.; Selman, B. SATPLAN04: Planning as satisfiability. In Proceedings of the Fifth International Planning Competition, Cumbria, UK, 6–10 June 2006; pp. 45–46. [Google Scholar]
- Do, M.B.; Kambhampati, S. Planning as constraint satisfaction: Solving the planning graph by compiling it into CSP. Art. Intell. 2001, 132, 151–182. [Google Scholar] [CrossRef]
- Nguyen, X.; Kambhampati, S. Reviving Partial Order Planning. IJCAI 2001, 1, 459–464. [Google Scholar]
- Magnenat, S.; Chappelier, J.C.; Mondada, F. Integration of Online Learning into HTN Planning for Robotic Tasks. In Proceedings of the AAAI Spring Symposium: Designing Intelligent Robots, Palo Alto, CA, USA, 26–28 March 2012. [Google Scholar]
- Brafman, R.I.; Domshlak, C. From One to Many: Planning for Loosely Coupled Multi-Agent Systems. In Proceedings of the Eighteenth International Conference on Automated Planning and Scheduling, Sydney, Australia, 14–18 September 2008; pp. 28–35. [Google Scholar]
- Bertoli, P.; Cimatti, A. Improving Heuristics for Planning as Search in Belief Space. In Proceedings of the Sixth International Conference on Artificial Intelligence Planning Systems, Toulouse, France, 23–27 April 2002; pp. 143–152. [Google Scholar]
- Rao, A.S.; Georgeff, M.P. BDI Agents: From Theory to Practice. ICMAS 1995, 95, 312–319. [Google Scholar]
- Garlan, D.; Cheng, S.W.; Huang, A.C.; Schmerl, B.; Steenkiste, P. Rainbow: Architecture-based self-adaptation with reusable infrastructure. Computer 2004, 37, 46–54. [Google Scholar] [CrossRef]
- Weiss, G. (Ed.) Multiagent Systems, 2nd ed.; Messachusetts Institute of Technology: Cambridge, MA, USA, 2013. [Google Scholar]
- Awaad, I.; Kraetzschmar, G.K.; Hertzberg, J. Finding Ways to Get the Job Done: An Affordance-Based Approach. In Proceedings of the 24th International Conference on Automated Planning and Scheduling, Portsmouth, NH, USA, 21–26 June 2014. [Google Scholar]
- Georgeff, M.P. A Theory of Action for MultiAgent Planning. In Proceedings of the Fourth National Conference on Artificial Intelligence, Austin, TX, USA, 6–10 August 1984; pp. 121–125. [Google Scholar]
- Pynadath, D.V.; Tambe, M. An Automated Teamwork Infrastructure for Heterogeneous Software Agents and Humans. Auton. Agents Multi-Agent Syst. 2003, 7, 71–100. [Google Scholar] [CrossRef]
- Gorniak, P.; Davis, I. SquadSmart: Hierarchical Planning and Coordinated Plan Execution for Squads of Characters; The AAAI Press: Palo Alto, CA, USA, 2007; pp. 14–19. [Google Scholar]
- Amigoni, F.; Gatti, N.; Pinciroli, C.; Roveri, M. What planner for ambient intelligence applications? IEEE Trans. Syst. Man Cybern. 2005, 35, 7–21. [Google Scholar] [CrossRef] [Green Version]
- Iatauro, M. Europa. Available online: https://github.com/nasa/europa (accessed on 18 December 2018).
- Verma, V.; Estlin, T.; Jónsson, A.; Pasareanu, C.; Simmons, R.; Tso, K. Plan execution interchange language (PLEXIL) for executable plans and command sequences. In Proceedings of the 8th International Symposium on Artificial Intelligence, Robotics and Automation in Space, Munich, Germany, 5–8 September 2005. [Google Scholar]
- Fry, C. PLEXIL. Available online: http://plexil.sourceforge.net/ (accessed on 18 December 2018).
- Bencomo, A. OpenSPIFe. Available online: https://github.com/nasa/OpenSPIFe/wiki (accessed on 18 December 2018).
- Pinciroli, C.; Lee-Brown, A.; Beltrame, G. Buzz: An Extensible Programming Language for Self-Organizing Heterogeneous Robot Swarms. arXiv, 2015; arXiv:1507.05946. [Google Scholar]
- Bartusch, M.; Möhring, R.H.; Radermacher, F.J. Scheduling project networks with resource constraints and time windows. Ann. Oper. Res. 1988, 16, 199–240. [Google Scholar] [CrossRef]
- Pinedo, M.L. Scheduling: Job Shops (Deterministic); Springer: Berlin, Germany, 2016; Chapter 6; pp. 183–220. [Google Scholar]
- Lawler, E.L.; Lenstra, J.K.; Kan, A.H.R.; Shmoys, D.B. Chapter 9 Sequencing and scheduling: Algorithms and complexity. In Logistics of Production and Inventory; Elsevier: Amsterdam, The Netherlands, 1993; Volume 4, pp. 445–522. [Google Scholar]
- Weiss, G. Multiagent Systems, 1st ed.; Messachusetts Institute of Technology: Cambridge, MA, USA, 2001. [Google Scholar]
- Smith, S.F.; Cheng, C.C. Slack-Based Heuristics for Constraint Satisfaction Scheduling. In Proceedings of the Eleventh National Conference on Artificial Intelligence, Washington, DC, USA, 11–15 July 1993; pp. 139–144. [Google Scholar]
- Colorni, A.; Dorigo, M.; Maniezzo, V.; Trubian, M. Ant system for job-shop scheduling. Belg. J. Oper. Res. Stat. Comput. Sci. 1994, 34, 39–53. [Google Scholar]
- Muscettola, N. Computing the Envelope for Stepwise-Constant Resource Allocations. In Proceedings of the 8th International Conference on Principles and Practice of Constraint Programming, Ithaca, NY, USA, 9–13 September 2002; pp. 139–154. [Google Scholar]
- Laborie, P. Algorithms for propagating resource constraints in AI planning and scheduling: Existing approaches and new results. Art. Intell. 2003, 143, 151–188. [Google Scholar] [CrossRef]
- Fox, M.S. Constraint-guided scheduling—A short history of research at CMU. Comput. Ind. 1990, 14, 79–88. [Google Scholar] [CrossRef]
- Currie, K.; Tate, A. O-Plan: The open planning architecture. Art. Intell. 1991, 52, 49–86. [Google Scholar] [CrossRef] [Green Version]
- Do, M.B.; Kambhampati, S. Sapa: A Domain-Independent Heuristic Metric Temporal Planner. In Proceedings of the Sixth European Conference on Planning, Toledo, Spain, 12–14 September 2001. [Google Scholar]
- Haslum, P.; Geffner, H. Heuristic Planning with Time and Resources. In Proceedings of the Sixth European Conference on Planning, Toledo, Spain, 12–14 September 2001. [Google Scholar]
- Zlot, R.; Stentz, A. Market-based multirobot coordination for complex tasks. Int. J. Robot. Res. 2006, 25, 73–101. [Google Scholar] [CrossRef]
- Dias, M.; Stentz, A. A Free Market Architecture for Coordinating Multiple Robots; Technical Report, CMU-RI-TR-99-42; Carnegie Mellon University: Pittsburgh, PA, USA, 1999. [Google Scholar]
- Anders, G.; Schiendorfer, A.; Siefert, F.; Steghöfer, J.P.; Reif, W. Cooperative Resource Allocation in Open Systems of Systems. ACM Trans. Auton. Adapt. Syst. 2015, 10, 1–44. [Google Scholar] [CrossRef]
- Smith, R.G. The Contract Net Protocol: High-Level Communication and Control in a Distributed Problem Solver. IEEE Trans. Comput. 1980, C-29, 1104–1113. [Google Scholar] [CrossRef]
- Prorok, A.; Hsieh, M.A.; Kumar, V. Fast Redistribution of a Swarm of Heterogeneous Robots. In Proceedings of the 9th EAI International Conference on Bio-inspired Information and Communications Technologies, New York, NY, USA, 3–5 December 2015. [Google Scholar]
- SWARM 2015: The First International Symposium on Swarm Behavior and Bio-Inspired Robotics. Available online: http://www.ohk.hiroshima-u.ac.jp/SWARM2015/ (accessed on 18 December 2018).
- Coltin, B.; Veloso, M. Mobile robot task allocation in hybrid wireless sensor networks. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Taipei, Taiwan, 18–22 October 2010; pp. 2932–2937. [Google Scholar]
- Giordani, S.; Lujak, M.; Martinelli, F. A Distributed Algorithm for the Multi-Robot Task Allocation Problem. In Proceedings of the 23rd International Conference on Industrial Engineering and Other Applications of Applied Intelligent Systems, IEA/AIE 2010, Cordoba, Spain, 1–4 June 2010; pp. 721–730. [Google Scholar]
- Vig, L.; Adams, J.A. Multi-robot coalition formation. IEEE Trans. Robot. 2006, 22, 637–649. [Google Scholar] [CrossRef] [Green Version]
- Khamis, A.M.; Elmogy, A.M.; Karray, F.O. Complex Task Allocation in Mobile Surveillance Systems. J. Intel. Robot. Syst. 2011, 64, 33–55. [Google Scholar] [CrossRef]
- Durfee, E.H. Coordination of Distributed Problem Solvers; Springer Science & Business Media: Berlin, Germany, 2012; Volume 55. [Google Scholar]
- Durfee, E.H.; Lesser, V.R. Partial global planning: A coordination framework for distributed hypothesis formation. IEEE Trans. Syst. Man Cybern. 1991, 21, 1167–1183. [Google Scholar] [CrossRef]
- Myers, K.L. CPEF: A continuous planning and execution framework. AI Mag. 1999, 20, 63. [Google Scholar]
- Beckett, D.; McBride, B. RDF/XML Syntax Specification (Revised). Available online: https://www.w3.org/TR/2003/WD-rdf-syntax-grammar-20030123 (accessed on 18 December 2018).
- Welty, C.; McGuinness, D.L.; Smith, M.K. Owl Web Ontology Language Guide. Available online: https://www.w3.org/TR/owl-guide (accessed on 18 December 2018).
- Dibley, M.; Li, H.; Rezgui, Y.; Miles, J. An integrated framework utilising software agent reasoning and ontology models for sensor based building monitoring. J. Civil Eng. Manag. 2015, 21, 356–375. [Google Scholar] [CrossRef]
- Kunze, L.; Roehm, T.; Beetz, M. Towards semantic robot description languages. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2011; pp. 5589–5595. [Google Scholar]
- Tenorth, M.; Beetz, M. KNOWROB—knowledge processing for autonomous personal robots. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 4261–4266. [Google Scholar]
- Drath, R. Datenaustausch in der Anlagenplanung mit AutomationML: Integration von CAEX, PLCopen XML und COLLADA; Springer: Berlin, Germany, 2009. [Google Scholar]
- Grangel-González, I.; Halilaj, L.; Coskun, G.; Auer, S.; Collarana, D.; Hoffmeister, M. Towards a semantic administrative shell for industry 4.0 components. In Proceedings of the 2016 IEEE Tenth International Conference on IEEE Semantic Computing (ICSC), Laguna Hills, CA, USA, 4–6 February 2016; pp. 230–237. [Google Scholar]
- Hannelius, T.; Salmenpera, M.; Kuikka, S. Roadmap to adopting OPC UA. In Proceedings of the 2008 6th IEEE International Conference on Industrial Informatics, Daejeon, Korea, 13–16 July 2008; pp. 756–761. [Google Scholar] [CrossRef]
- Becker, M.; Blatt, F.; Szczerbicka, H. A Multi-agent Flooding Algorithm for Search and Rescue Operations in Unknown Terrain. In Proceedings of the 11th German Conference on Multiagent System Technologies, Koblenz, Germany, 16–20 September 2013; pp. 19–28. [Google Scholar]
- Hussein, A.; Adel, M.; Bakr, M.; Shehata, O.M.; Khamis, A. Multi-robot Task Allocation for Search and Rescue Missions. J. Phys. Conf. Ser. 2014, 570, 052006. [Google Scholar] [CrossRef]
- Caron, D.; Stauffer, B.; Darjany, L.; Oberg, C.; Pereira, A.; Das, J.; Heidarsson, H.; Smith, R.; Smith, E.; Seubert, E.; et al. Networked Aquatic Microbial Observing Systems: An Overview. Available online: https://escholarship.org/uc/item/2vh5g17p (accessed on 18 December 2018).
- Valentini, G.; Hamann, H.; Dorigo, M. Efficient Decision-Making in a Self-Organizing Robot Swarm: On the Speed Versus Accuracy Trade-Off. In Proceedings of the 2015 International Conference on Autonomous Agents and Multiagent Systems, Istanbul, Turkey, 4–8 May 2015; pp. 1305–1314. [Google Scholar]
- Mondada, F.; Gambardella, L.M.; Floreano, D.; Nolfi, S.; Deneuborg, J.L.; Dorigo, M. The cooperation of swarm-bots: Physical interactions in collective robotics. IEEE Robot. Autom. Mag. 2005, 12, 21–28. [Google Scholar] [CrossRef]
- Nejati, N.; Langley, P.; Konik, T. Learning Hierarchical Task Networks by Observation. In Proceedings of the 23rd International Conference on Machine Learning, Pittsburgh, PA, USA, 25–29 June 2006; pp. 665–672. [Google Scholar]



















© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kosak, O.; Wanninger, C.; Hoffmann, A.; Ponsar, H.; Reif, W. Multipotent Systems: Combining Planning, Self-Organization, and Reconfiguration in Modular Robot Ensembles. Sensors 2019, 19, 17. https://doi.org/10.3390/s19010017
Kosak O, Wanninger C, Hoffmann A, Ponsar H, Reif W. Multipotent Systems: Combining Planning, Self-Organization, and Reconfiguration in Modular Robot Ensembles. Sensors. 2019; 19(1):17. https://doi.org/10.3390/s19010017
Chicago/Turabian StyleKosak, Oliver, Constantin Wanninger, Alwin Hoffmann, Hella Ponsar, and Wolfgang Reif. 2019. "Multipotent Systems: Combining Planning, Self-Organization, and Reconfiguration in Modular Robot Ensembles" Sensors 19, no. 1: 17. https://doi.org/10.3390/s19010017
APA StyleKosak, O., Wanninger, C., Hoffmann, A., Ponsar, H., & Reif, W. (2019). Multipotent Systems: Combining Planning, Self-Organization, and Reconfiguration in Modular Robot Ensembles. Sensors, 19(1), 17. https://doi.org/10.3390/s19010017