Investigating the Performance of Bi-Static GPR Antennas for Near-Surface Object Detection




Abstract
:1. Introduction
2. Methodology
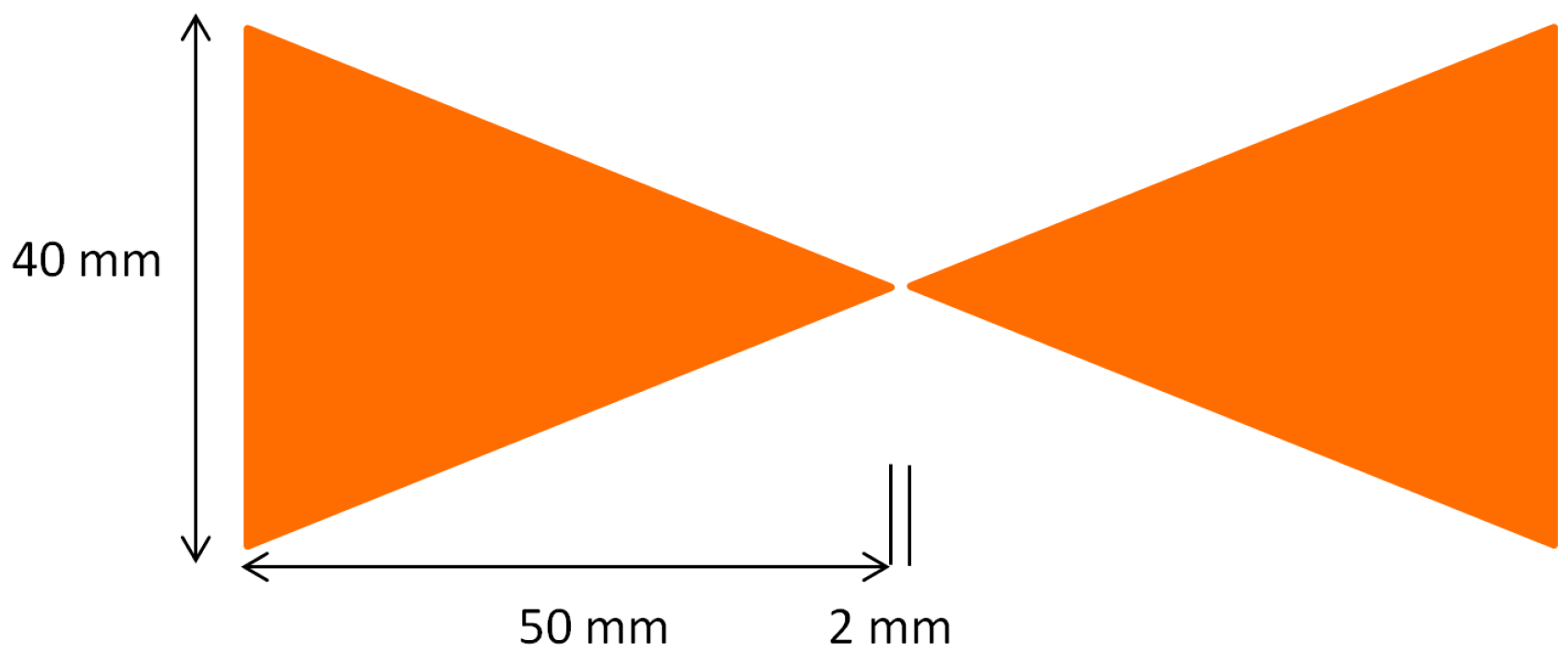
2.1. Individual Antennas
2.2. Object Description
2.3. Soil Simulation
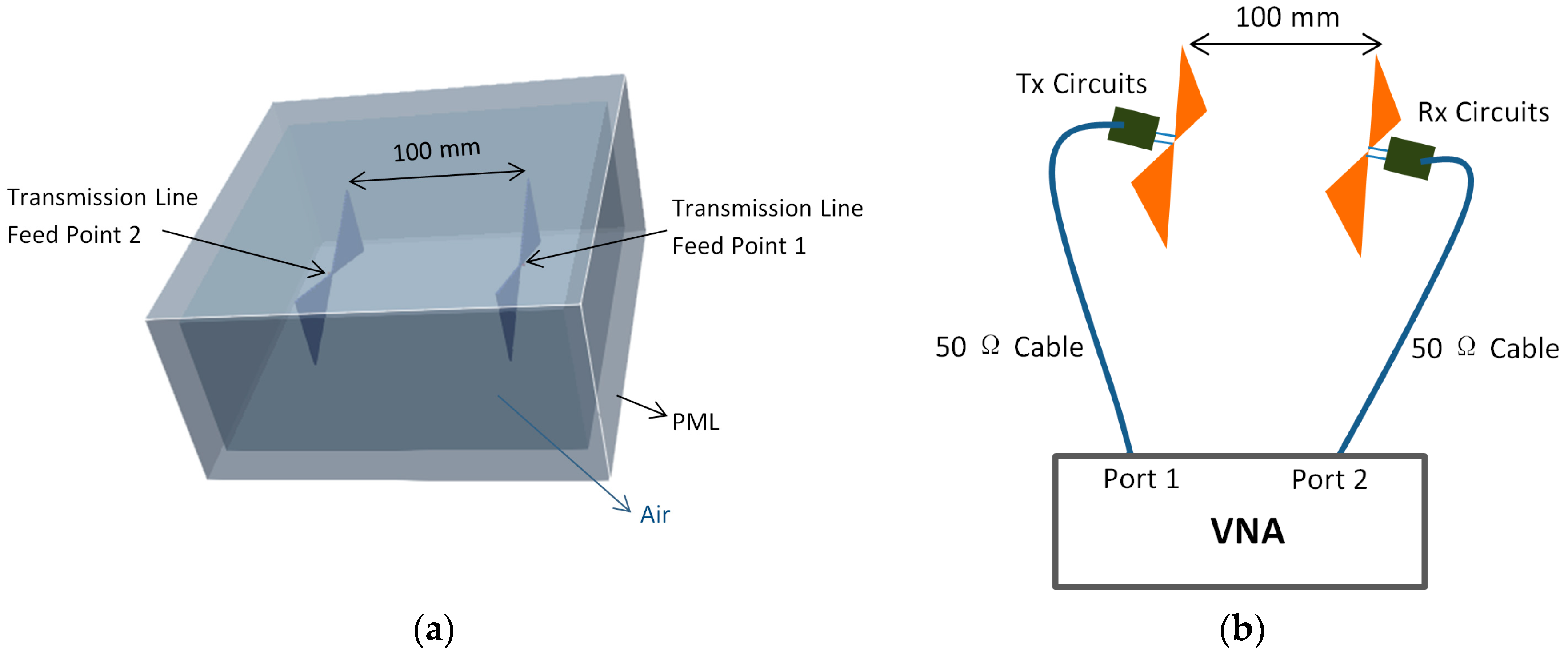
2.4. Face to Face Antenna Configuration
2.5. Side by Side Antenna Configuration
2.6. Data Processing
3. Results and Discussion
3.1. Antenna Input Impedance Simulation
3.2. Comparison of Simulation and Experiment Waveforms
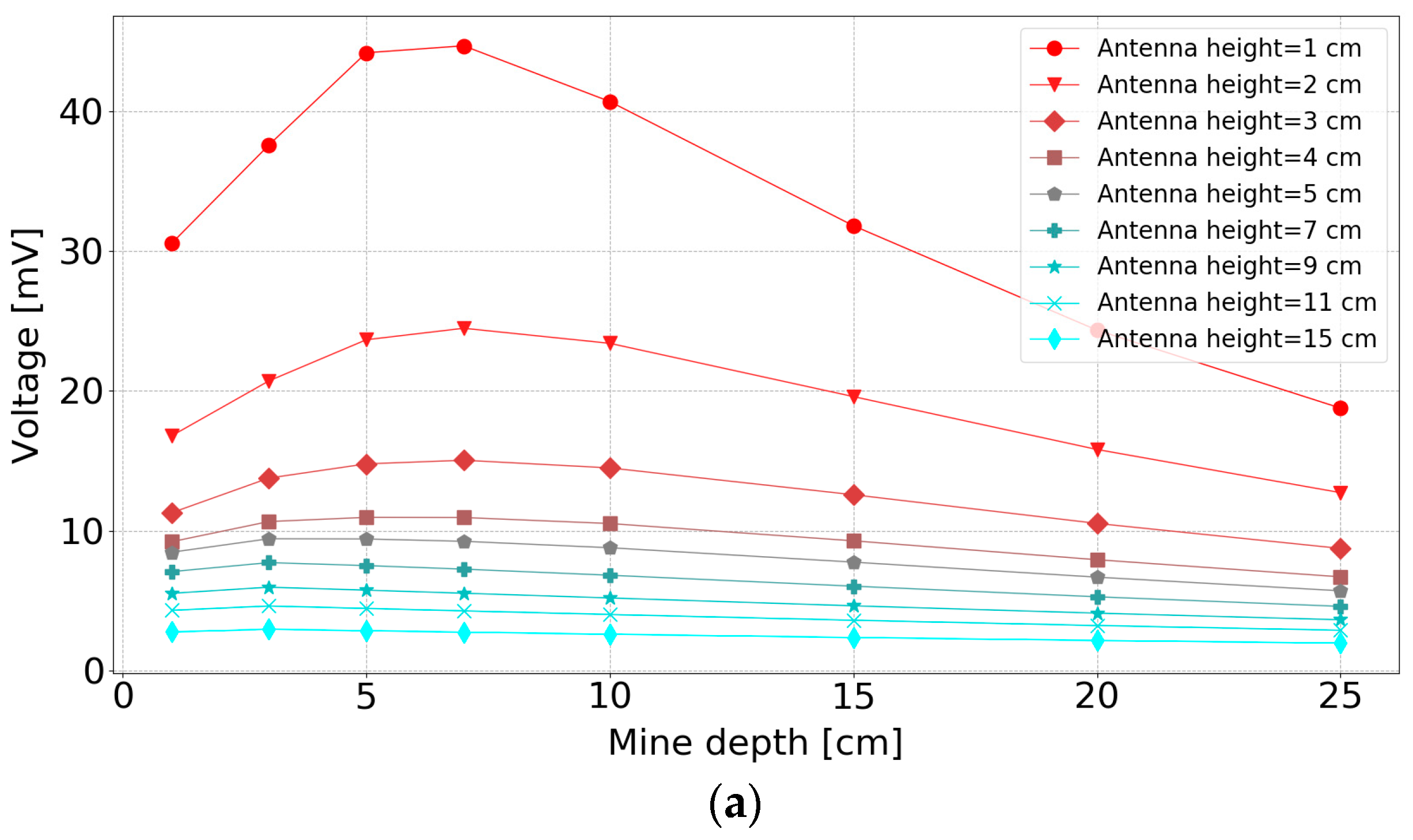
3.3. Antenna Height above the Soil
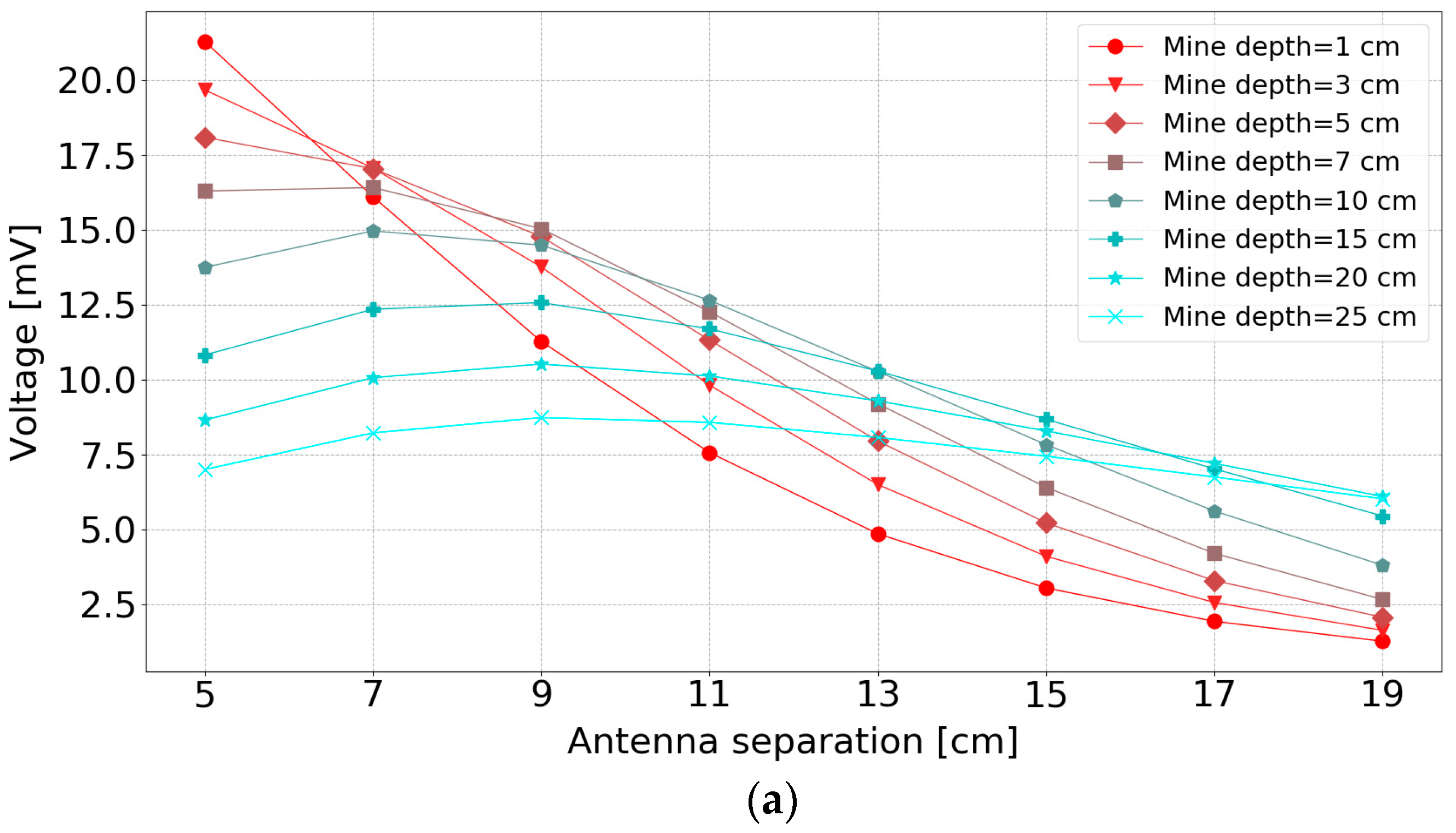
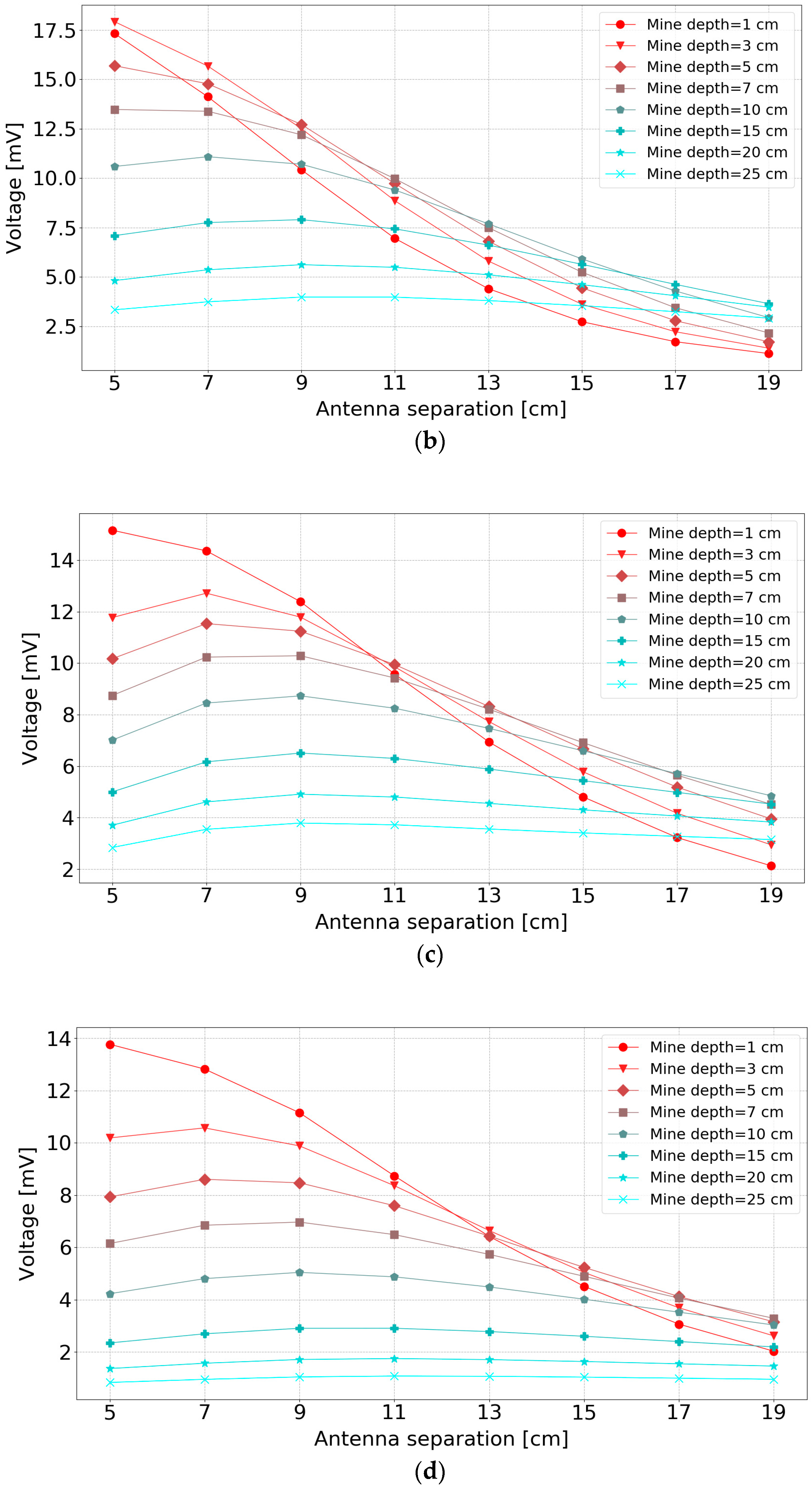
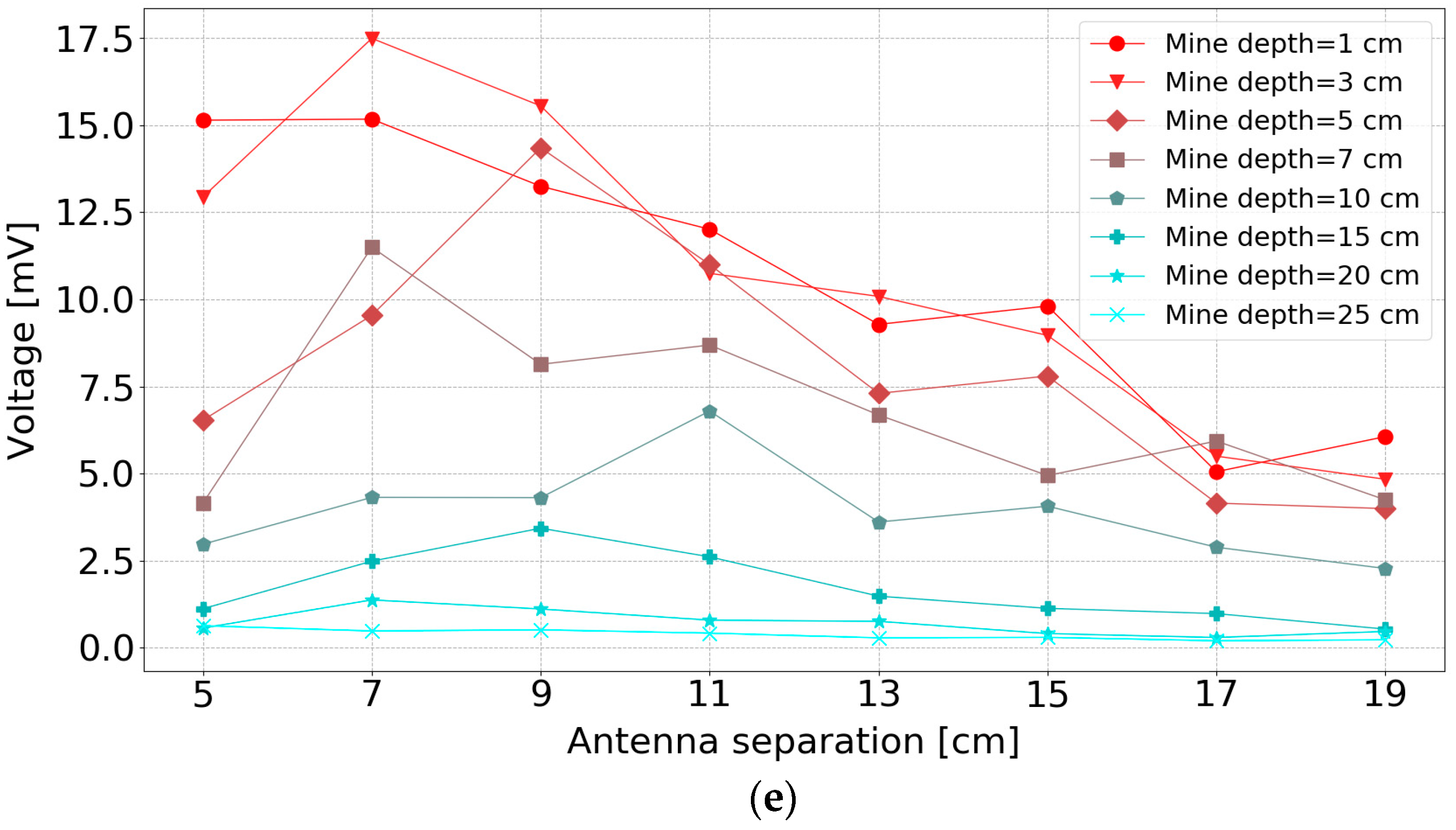
3.4. Antenna Separation
3.5. In-Field Testing
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Daniels, D.J. Ground Penetrating Radar; IET: London, UK, 2004; Volume 1. [Google Scholar]
- Croll, M. The History of Landmines; Pen & Sword: South Yorkshire, UK, 1998. [Google Scholar]
- Human Rights Watch Arms Project; Physicians for Human Rights. Landmines: A Deadly Legacy; Human Rights Watch: New York, NY, USA, 1993. [Google Scholar]
- King, C. Jane’s Mines and Mine Clearance; Jane’s Information Group: London, UK, 1998. [Google Scholar]
- UN Secretary-General. Assistance in Mine Clearance: Report of the Secretary-General A/49/357; United Nations: New York, NY, USA, 1994. [Google Scholar]
- Daniels, D.J. A review of GPR for landmine detection. Sens. Imaging Int. J. 2006, 7, 90–123. [Google Scholar] [CrossRef]
- Walsh, N.E.; Walsh, W.S. Rehabilitation of landmine victims—The ultimate challenge. Bull. World Health Organ. 2003, 81, 665–670. [Google Scholar] [PubMed]
- Blagden, P. Anti-Personnel Landmines-Friend or Foe? A Study of the Military Use and Effectiveness of Anti—Personnel Mines; ICRC: Geneva, Switzerland, 1996. [Google Scholar]
- Sule, S.D. Handheld Sensor Fusion for Landmine Detection Using Metal Detector and GPR. Front. Sci. 2017, 7, 51–56. [Google Scholar]
- Masarik, M.P.; Burns, J.; Thelen, B.T.; Kelly, J.; Havens, T.C. Enhanced Buried UXO Detection via GPR/EMI Data Fusion. In Proceedings of the Conference on Detection and Sensing of Mines, Explosive Objects, and Obscured Targets XXI, Baltimore, MD, USA, 18–21 April 2016. [Google Scholar]
- Daniels, D.; Braunstein, J.; Nevard, M. Using minehound in Cambodia and Afghanistan. J. Conv. Weapons Destr. 2015, 18, 14. [Google Scholar]
- Boshoff, C.; Cresci, R. The HALO Trust and HSTAMIDS. J. Conv. Weapons Destr. 2015, 12, 43. [Google Scholar]
- Sato, M.; Kikuta, K.; Chemyak, I. Dual Sensor “ALlS” for Humanitarian Demining. In Proceedings of the 2018 17th International Conference on Ground Penetrating Radar (GPR), Rapperswil, Switzerland, 18–21 June 2018; pp. 1–4. [Google Scholar]
- Nayak, R.; Maiti, S. A Review of Bow-Tie Antennas for GPR Applications. IETE Tech. Rev. 2018, 1–16. [Google Scholar] [CrossRef]
- Natarajan, R.; George, J.V.; Kanagasabai, M.; Shrivastav, A.K. A Compact Antipodal Vivaldi Antenna for UWB Applications. IEEE Antennas Wirel. Propag. Lett. 2015, 14, 1557–1560. [Google Scholar] [CrossRef]
- Kazemi, R. Development of a logarithmic spiral antenna in UWB GPR for humanitarian demining. Electromagnetics 2018, 38, 366–379. [Google Scholar] [CrossRef]
- Turk, A.S. Ultra-wideband TEM horn design for ground penetrating impulse radar systems. Microw. Opt. Technol. Lett. 2004, 41, 333–336. [Google Scholar] [CrossRef]
- Li, X.P.; Shao, J.J.; Zhang, Y. Research on Resistor-Loaded Half-Ellipse Antenna System for GPR Application. Int. J. Antennas Propag. 2016. [Google Scholar] [CrossRef]
- Lestari, A.A.; Yarovoy, A.G.; Ligthart, L.P. RC-loaded bow-tie antenna for improved pulse radiation. IEEE Trans. Antennas Propag. 2004, 52, 2555–2563. [Google Scholar] [CrossRef]
- Ajith, K.; Bhattacharya, A. Improving the GPR Detectability Using a Novel Loop Bowtie Antenna. J. Telecommun. Inf. Technol. 2017, 3, 9–16. [Google Scholar] [CrossRef]
- Wang, Y.C.; Yin, D.; Liu, J.W.; Kai, T.; Dong, Z.H.; Ye, S.B.; Ji, Y.C.; Fang, G.Y.; Zhang, X.J.; Zhou, X.L.; et al. A Novel Ellipse Back-Cavity and Slot-Tuned Bow-tie Antenna for Ground Penetrating Radar. In Proceedings of the 2016 16th International Conference on Ground Penetrating Radar (Gpr), Hong Kong, China, 13–16 June 2016. [Google Scholar]
- Lee, D. A compact resistively-loaded dipole antenna fed by a triangular tapered transmission line for imaging applications. Aeu-Int. J. Electron. Commun. 2018, 88, 126–133. [Google Scholar] [CrossRef]
- Zhao, G.; Yin, Y.Z. A novel compact wideband tightly coupled bowtie antenna. In Proceedings of the 2018 Cross Strait Quad-Regional Radio Science and Wireless Technology Conference (Csqrwc), Xuzhou, China, 21–24 July 2018. [Google Scholar]
- Stutzman, W.L.; Thiele, G.A. Antenna Theory and Design; John Wiley & Sons: New York, NY, USA, 2013. [Google Scholar]
- Brown, G.H.; Woodward, O. Experimentally determined radiation characteristics of conical and triangular antennas. RCA Rev. 1952, 13, 425–452. [Google Scholar]
- Carrel, R. The characteristic impedance of two infinite cones of arbitrary cross section. IRE Trans. Antennas Propag. 1958, 6, 197–201. [Google Scholar] [CrossRef]
- Ali, J.; Abdullah, N.; Ismail, M.Y.; Mohd, E.; Shah, S.M. Ultra-Wideband Antenna Design for GPR Applications: A Review. Int. J. Adv. Comput. Sci. Appl. 2017, 8, 392–400. [Google Scholar] [CrossRef]
- Warren, C.; Giannopoulos, A. Creating finite-difference time-domain models of commercial ground-penetrating radar antennas using Taguchi’s optimization method. Geophysics 2011, 76, G37–G47. [Google Scholar] [CrossRef]
- Lestari, A. Antennas for Improved Ground Penetrating Radar. Ph.D. Thesis, Technische Universiteit Delft, Delft, The Netherlands, 2003. [Google Scholar]
- Wu, T.; King, R. The cylindrical antenna with nonreflecting resistive loading. IEEE Trans. Antennas Propag. 1965, 13, 369–373. [Google Scholar] [CrossRef] [Green Version]
- Lestari, A.A.; Bharata, E.; Suksmono, A.B.; Kurniawan, A.; Yarovoy, A.G.; Ligthart, L.P. A Modified Bow-Tie Antenna for Improved Pulse Radiation. IEEE Trans. Antennas Propag. 2010, 58, 2184–2192. [Google Scholar] [CrossRef]
- Shlager, K.L.; Smith, G.S.; Maloney, J.G. Optimization Of Bow-Tie Antennas For Pulse Radiation. IEEE Trans. Antennas Propag. 1994, 42, 975–982. [Google Scholar] [CrossRef]
- Maloney, J.G.; Smith, G.S. A Study Of Transient Radiation From The Wu-King Resistive Monopole—Fdtd Analysis And Experimental Measurements. IEEE Trans. Antennas Propag. 1993, 41, 668–676. [Google Scholar] [CrossRef]
- Yarovoy, A.G.; Pugliese, R. Capacitevely loaded bowtie antenna for ultrawideband impulse radio. Radio Sci. 2006, 41. [Google Scholar] [CrossRef] [Green Version]
- Lombardi, F.; Griffiths, H.; Balleri, A. Bistatic Radar Signature of Buried Landmines; IET: London, UK, 2017. [Google Scholar]
- Poley, H. GPR Antennas Design and Experimental Evaluation. Master Thesis, Delft University of Technology, Delft, The Netherlands, 2010. [Google Scholar]
- Kang, W.; Kim, C.R.; Kim, J.H.; Park, S.G.; Cho, J.; Son, J.S.; Kim, K.W. A Study of Antenna Configuration for Bistatic Ground-Penetrating Radar; IEEE: New York, NY, USA, 2016. [Google Scholar]
- Zhang, Y.; Orfeo, D.; Burns, D.; Miller, J.; Huston, D.; Xia, T. Buried Nonmetallic Object Detection using Bistatic Ground Penetrating Radar with Variable Antenna Elevation Angle and Height. Available online: https://doi.org/10.1117/12.2260055 (accessed on 30 November 2018).
- Gurel, L.; Oguz, U. Transmitter-receiver-transmitter configurations of ground-penetrating radar. Radio Sci. 2002, 37, 7. [Google Scholar] [CrossRef]
- Giannakis, I.; Giannopoulos, A.; Warren, C. Realistic FDTD GPR Antenna Models Optimized Using a Novel Linear/Nonlinear Full-Waveform Inversion. IEEE Trans. Geosci. Remote Sens. 2018. [Google Scholar] [CrossRef]
- Lambot, S.; Andre, F.; Slob, E.; Vereecken, H. Effect of antenna-medium coupling in the analysis of ground-penetrating radar data. Near Surf. Geophys. 2012, 10, 631–639. [Google Scholar] [CrossRef] [Green Version]
- Lambot, S.; Andre, F. Full-Wave Modeling of Near-Field Radar Data for Planar Layered Media Reconstruction. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2295–2303. [Google Scholar] [CrossRef] [Green Version]
- Tran, A.P.; Warren, C.; Andre, F.; Giannopoulos, A.; Lambot, S. Numerical evaluation of a full-wave antenna model for near-field applications. Near Surf. Geophys. 2013, 11, 155–165. [Google Scholar] [CrossRef]
- Warren, C.; Giannopoulos, A. Experimental and Modeled Performance of a Ground Penetrating Radar Antenna in Lossy Dielectrics. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 29–36. [Google Scholar] [CrossRef]
- Warren, C.; Giannopoulos, A. Characterisation of a ground penetrating radar antenna in lossless homogeneous and lossy heterogeneous environments. Signal Process. 2017, 132, 221–226. [Google Scholar] [CrossRef] [Green Version]
- Giannakis, I.; Giannopoulos, A.; Warren, C. A Realistic FDTD Numerical Modeling Framework of Ground Penetrating Radar for Landmine Detection. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 37–51. [Google Scholar] [CrossRef]
- Stadler, S.; Igel, J. A numerical study on using guided GPR waves along metallic cylinders in boreholes for permittivity sounding. In Proceedings of the 2018 17th International Conference on Ground Penetrating Radar (GPR), Rapperswil, Switzerland, 18–21 June 2018; pp. 1–4. [Google Scholar]
- Loewer, M.; Igel, J.; Wagner, N. Spectral Decomposition of Soil Electrical and Dielectric Losses and Prediction of In Situ GPR Performance. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 212–220. [Google Scholar] [CrossRef]
- Loewer, M.; Igel, J. FDTD Simulation of GPR with a Realistic Multi-Pole Debye Description of Lossy and Dispersive Media. In Proceedings of the 2016 16th International Conference on Ground Penetrating Radar (Gpr), Hong Kong, China, 13–16 June 2016. [Google Scholar]
- Warren, C.; Giannopoulos, A.; Giannakis, I. gprMax: Open source software to simulate electromagnetic wave propagation for Ground Penetrating Radar. Comput. Phys. Commun. 2016, 209, 163–170. [Google Scholar] [CrossRef] [Green Version]
- Gao, X.; Podd, F.J.; van Verre, W.; Daniels, D.J.; Tan, Y.M.; Peyton, A.J. Simulation of Ground Penetrating Radar for Anti-personnel Landmine Detection. In Proceedings of the 2018 17th International Conference on Ground Penetrating Radar (GPR), Rapperswil, Switzerland, 18–21 June 2018; pp. 1–4. [Google Scholar]
- Strifors, H.C.; Friedmann, A.; Abrahamson, S.; Gaunaurd, G.C. Comparison of the Relative Merits for Target Recognition by Ultrawideband Radar Based on Emitted Impulse or Step-Frequency Wave. Available online: https://doi.org/10.1117/12.395551 (accessed on 30 November 2018).




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| gprMax Parameters | Value |
|---|---|
| Frequency range | 20 MHz to 6 GHz |
| Time domain range | 20 ns |
| Input signal format | Gaussian signal |
| Input signal amplitude | 1 V |
| Input signal central frequency | 1.5 GHz |
| Domain dimension | 40 cm × 60 cm × 20 cm |
| Cell size | 2 mm |
| Perfect matching layer (PML) thickness | 10 cells |
| VNA Parameters | Value |
|---|---|
| Number of steps | 201 |
| Frequency step size | 32.3 MHz |
| Start frequency | 32.3 MHz |
| Stop frequency | 6500 MHz |
| I.F. bandwidth 1 | 1 kHz |
| Parameters | Value |
|---|---|
| ɛ∞ | 3.32 |
| Δε1 | 4.35 |
| τ1 (ps) | 5.90 |
| Δε2 | 53.34 |
| τ2 (υs) | 428.7 |
| σdc (S/m) | 0.012 |
| Variables | Nominal Value (cm) | Variable Range (cm) |
|---|---|---|
| Antenna separation | 9 | [5, 7, 9, 11, 13, 15, 17, 19] |
| Antenna height above soil | 3 | [1, 2, 3, 4, 5, 7, 9, 11, 15] |
| Object depth | 10 | [1, 3, 5, 7, 10, 15, 20, 25] |
| VNA Parameters | Value |
|---|---|
| Number of steps | 200 |
| Frequency step size | 30 MHz |
| Start frequency | 30 MHz |
| Stop frequency | 6000 MHz |
| I.F. bandwidth 1 | 100 kHz |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, X.; Podd, F.J.W.; Van Verre, W.; Daniels, D.J.; Peyton, A.J. Investigating the Performance of Bi-Static GPR Antennas for Near-Surface Object Detection. Sensors 2019, 19, 170. https://doi.org/10.3390/s19010170
Gao X, Podd FJW, Van Verre W, Daniels DJ, Peyton AJ. Investigating the Performance of Bi-Static GPR Antennas for Near-Surface Object Detection. Sensors. 2019; 19(1):170. https://doi.org/10.3390/s19010170
Chicago/Turabian StyleGao, Xianyang, Frank J. W. Podd, Wouter Van Verre, David J. Daniels, and Anthony J. Peyton. 2019. "Investigating the Performance of Bi-Static GPR Antennas for Near-Surface Object Detection" Sensors 19, no. 1: 170. https://doi.org/10.3390/s19010170
APA StyleGao, X., Podd, F. J. W., Van Verre, W., Daniels, D. J., & Peyton, A. J. (2019). Investigating the Performance of Bi-Static GPR Antennas for Near-Surface Object Detection. Sensors, 19(1), 170. https://doi.org/10.3390/s19010170