Experimental Investigation of High Temperature-Resistant Inductive Sensor for Blade Tip Clearance Measurement


Abstract
:1. Introduction
2. Method and Sensor
2.1. Inductive Tip Clearance Measurement
2.2. Sensor Structure and Manufacture
3. Sensor Performance
3.1. Characteristics Calibration
3.2. Heat Resistance Test
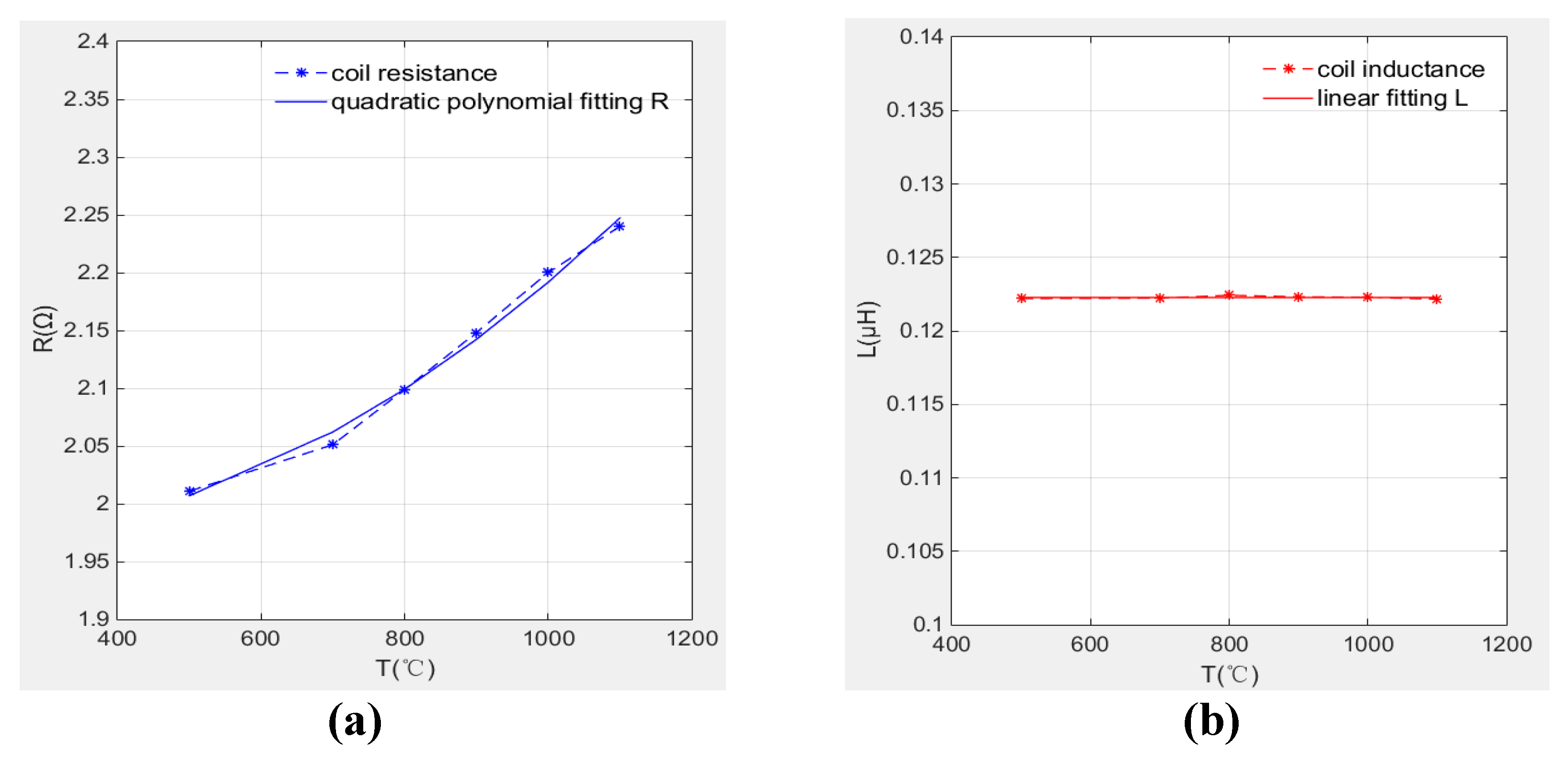
4. Thermal Effect on Sensor
4.1. Experiment Method
4.2. Experiment Results
5. Conclusions
- The designed sensor with planar coil made of platinum wire is proved to be a good inductive sensor for its phase angle is up to 85° and quality factor is 14.27 under 4 MHz excitation frequency.
- The sensor performance meets the requirements of tip clearance measurement for the measuring range of sensor is proved to be at least 5 mm and the resolution is better than 10 μm within 5 mm range according to static calibration result. It is also found that the sensor coil repeatability is almost better than 0.05% within the whole sensing range.
- The encapsulated platinum coil can be long-term (2 h) heat-resistant at 1100 °C and maintains a good stability during multiple temperature cycles. This suggests the designed sensor is capable to operate in the high temperature for a long time and that is an important basis for the sensor to be used in turbine tip clearance measurement in the future.
- The inductance and resistance of the sensor coil can be solved based by phasor analysis and using the series resistance circuit. This decoupled analysis of sensor parameters makes its application range wider.
Author Contributions
Funding
Conflicts of Interest
References
- Scott, B.L.; Bruce, M.S. Turbine engine clearance control systems: Current practices and future directions. In Proceedings of the 38th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, Indianapolis, IN, USA, 7–10 July 2002. [Google Scholar]
- Scott, B.L.; Bruce, M.S.; Robbie, M.G. Test rig for evaluating active turbine tip clearance control concepts. In Proceedings of the NASA Seal/Secondary Air System Workshop, Cleveland, OH, USA, 5 November 2003. [Google Scholar]
- Weimer, M. Design and test of an active tip clearance system for centrifugal compressors. In Proceedings of the 38th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, Indianapolis, IN, USA, 7–10 July 2002. [Google Scholar]
- Mark, R.W.; James, W.R.; Christopher, E.H.; Timothy, J.B. Testing of a microwave blade tip clearance sensor at the NASA Glenn Research Center. In Proceedings of the 47th AIAA Aerospace Science Meeting, Orlando, FL, USA, 5–8 January 2009. [Google Scholar]
- Mark, R.W.; Ali, A.A.; Timothy, J.B. A Microwave Blade Tip Clearance Sensor for Propulsion Health Monitoring. In Proceedings of the AIAA Infotech@Aerospace, Atlanta, GA, USA, 20–22 April 2010. [Google Scholar]
- Scientific and Technical Information Program. Available online: https://ntrs.nasa.gov/search.jsp?R=20140009171 (accessed on 23 March 2018).
- Poppe, G.L.; Marple, D.T.F.; Baumbick, R.J. Optical Tip Clearance Sensor for Aircraft Engine Controls. In Proceedings of the AIAA/SAE/ASME 18th Joint Propulsion Conference, Cleveland, OH, USA, 21–23 June 1982. [Google Scholar]
- García, I.; Beloki, J.; Zubia, J. An Optical Fiber Bundle Sensor for Tip Clearance and Tip Timing Measurements in a Turbine Rig. Sensors 2013, 13, 7385–7398. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- García, I.; Zubia, J.; Berganza, J. Different Configurations of a Reflective Intensity-Modulated Optical Sensor to Avoid Modal Noise in Tip-Clearance Measurements. J. Lightw. Tech. 2015, 12, 2663–2669. [Google Scholar] [CrossRef]
- García, I.; Przysowa, R.; Amorebieta, J.; Joseba, Z. Tip-Clearance Measurement in the First Stage of the Compressor of an Aircraft Engine. Sensors 2016, 16, 1897. [Google Scholar] [CrossRef] [PubMed]
- Gil-García, J.M.; Solís, A.; Aranguren, G. An Architecture for On-Line Measurement of the Tip Clearance and Time of Arrival of a Bladed Disk of an Aircraft Engine. Sensors 2017, 17, 2162. [Google Scholar] [CrossRef] [PubMed]
- Durana, G.; Amorebieta, J.; Fernandez, R. Design, Fabrication and Testing of a High-Sensitive Fibre Sensor for Tip Clearance Measurements. Sensors 2018, 18, 2610. [Google Scholar] [CrossRef] [PubMed]
- Andreas, K.; Stefan, S.; Thomas, R.; Ken, H. Spatial and temporal high-resolution optical tip-clearance probe for harsh environments. In Proceedings of the 13th International Symposium on Applications of Laser Techniques to Fluid Mechanics, Lisbon, Portugal, 26–29 June 2006. [Google Scholar]
- Mossop, I.A.; Gill, F.D. The measurement of blade-tip clearances in aircraft turbines by a capacitance method. Proc. Ins. Elec. Eng. 1953, 100, 377–386. [Google Scholar]
- Muller, D.; Shear, A.G.; Mozumdar, S.; Johann, E. Capacitive measurement of compressor and turbine blade tip to casing running clearance. In Proceedings of the International Gas Turbine and Aeroengine Congress & Exhibition, Birmingham, UK, 10–13 June 1996. [Google Scholar]
- Chana, K.S.; Cardwell, M.T.; Sullivan, J.S. The development of a hot section eddy current sensor for turbine tip clearance measurement. In Proceedings of the ASME Turbo Expo, San Antonio, TX, USA, 3–7 June 2013. [Google Scholar]
- Chana, K.S.; Sridhar, V.; Singh, D. The use of eddy current sensors for the measurement of rotor blade Tip timing: Development of a new method based on integration. In Proceedings of the ASME Turbo Expo, Seoul, Korea, 13–17 June 2016. [Google Scholar]
- Sridhar, V.; Chana, K.S. Tip-clearnce measurement on an engine high pressure turbine using an eddy current sensor. In Proceedings of the ASME Turbo Expo, Charlotte, NC, USA, 26–30 June 2017. [Google Scholar]
- Sridhar, V.; Chana, K.S. Development of a combined eddy current and pressure sensor for gas turbine blade health monitoring. In Proceedings of the ASME Turbo Expo, Charlotte, NC, USA, 26–30 June 2017. [Google Scholar]
- Du, L.; Zhu, X.L.; Zhe, J. A high sensitivity inductive sensor for blade tip clearance measurement. Smart Mater. Struct. 2014, 6, 065018–065027. [Google Scholar] [CrossRef]
- Han, Y.; Zhong, C.; Zhu, X.L.; Zhe, J. Online monitoring of dynamic tip clearance of turbine blades in high temperature environments. Meas. Sci. Technol. 2018. accepted. [Google Scholar] [CrossRef]
- Lv, Y.T.; Zhu, C.S. High temperature eddy current displacement sensor based on temperature drift compensation. J. Zhejiang Univ. (Eng. Sci.) 2015, 4, 749–753. [Google Scholar]
- Wang, H.B.; Feng, Z.H. Ultrastable and highly sensitive eddy current displacement sensor using self-temperature compensation. Sens. Actuators 2013, 203, 362–368. [Google Scholar] [CrossRef]
- Wheeler, H.A. Simple inductance formulas for radio coils. Proc. Inst. Radio Eng. 1928, 16, 1398–1400. [Google Scholar] [CrossRef]
- Zhao, Z.Y.; Liu, Z.X.; Lyu, Y.G.; Xu, X.X. Verification and design of high precision eddy current sensor for tip clearance measurement. In Proceedings of the ASME Turbo Expo, Oslo, Norway, 11–15 June 2018. [Google Scholar]
- Zhao, Z.Y.; Liu, Z.X.; Lyu, Y.G.; Xu, X.X. Design and verification of high resolution eddy current sensor for blade tip clearance measurement. Chin. J. Sci. Inst. 2018, 6, 132–139. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Clearance (mm) | dV/V0 (−%) |
|---|---|
| 4.95 | 0.465 |
| 4.96 | 0.457 |
| 4.97 | 0.450 |
| 4.98 | 0.442 |
| 4.99 | 0.434 |
| 5.00 | 0.427 |
| Clearance (mm) | Voltage (V) | Repeatibility (%) |
|---|---|---|
| 0.0 | 0.41332 | 0.0327 |
| 0.5 | 0.43260 | 0.0300 |
| 1.0 | 0.44202 | 0.0171 |
| 1.5 | 0.44786 | 0.0288 |
| 2.0 | 0.45032 | 0.0179 |
| 2.5 | 0.45314 | 0.0055 |
| 3.0 | 0.45352 | 0.0311 |
| 3.5 | 0.45458 | 0.0593 |
| 4.0 | 0.45614 | 0.0483 |
| 4.5 | 0.45706 | 0.0378 |
| 5.0 | 0.45781 | 0.0327 |
| p0 | p1 | p2 | |
|---|---|---|---|
| R(T) | 1.9779 | −9.7757 × 10−5 | 3.1143 × 10−7 |
| L(T) | 0.12227 | −2.8571 × 10−9 | / |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Z.; Liu, Z.; Lyu, Y.; Gao, Y. Experimental Investigation of High Temperature-Resistant Inductive Sensor for Blade Tip Clearance Measurement. Sensors 2019, 19, 61. https://doi.org/10.3390/s19010061
Zhao Z, Liu Z, Lyu Y, Gao Y. Experimental Investigation of High Temperature-Resistant Inductive Sensor for Blade Tip Clearance Measurement. Sensors. 2019; 19(1):61. https://doi.org/10.3390/s19010061
Chicago/Turabian StyleZhao, Ziyu, Zhenxia Liu, Yaguo Lyu, and Yajun Gao. 2019. "Experimental Investigation of High Temperature-Resistant Inductive Sensor for Blade Tip Clearance Measurement" Sensors 19, no. 1: 61. https://doi.org/10.3390/s19010061
APA StyleZhao, Z., Liu, Z., Lyu, Y., & Gao, Y. (2019). Experimental Investigation of High Temperature-Resistant Inductive Sensor for Blade Tip Clearance Measurement. Sensors, 19(1), 61. https://doi.org/10.3390/s19010061