1. Introduction
Flight vehicles are considered as one of the key flight equipment types in the 21st century since they can fly at ultra-high-speed in the near space and have the functions of aircraft, carriers and spacecraft, etc. [
1]. The surface of flight vehicles (such as aerospace vehicle, Low Earth Orbit (LEO) satellites, near-space aircrafts, Unmanned Aerial Vehicles (UAVs) and drones) suffer the micro-pressure from high-altitude thin air when they are flying at high speed. Long-term effect of this pressure can deform the surface components, which could lead to a serious accident [
2]. Therefore, it is important to develop sensor to measure this kind of micro-pressure.
An aerospace vehicle primarily flies in the atmosphere of the troposphere, the stratosphere and the mesosphere (especially the stratosphere and the mesosphere) at the height of about 20–70 km [
3]. The height where spacecraft is located still exists the impact of thin atmosphere and harsh ambient temperature. It can lead to components wearing out or even being damaged after many hours of service.
When the spacecraft is static in the stratosphere, the ambient temperature is approximately from −53.2 °C to 0 °C and the flying height range is about 20–50 km. Pressure (P) equals 5.46 kPa at the height of 20 km, and the pressure is close to 0.5 kPa at the height of 50 km. When the aerospace vehicle is in the mesosphere, the ambient temperature changes from −55 °C to 0 °C and the altitude is about 50–70 km. The air at this altitude is very thin. According to the atmospheric temperature vertical profile [
3], the maximum pressure reaches 0.5 kPa and the lowest is 0.05 kPa.
An aerospace vehicle has a high speed when flying dynamically. The effect of the thin air in near space will generate a dynamic resistance
[
4], which can be calculated by
where
is the air resistance coefficient,
is the velocity of the object relative to the fluid,
is the windward area of the object, and
is the air density at the current altitude (the
of normal dry air is 1.293 kg/m
3). The air density at the current altitude
can be calculated by
where
is the current altitude pressure,
is the standard atmospheric pressure,
is the Kelvin temperature at zero degrees, and
is the current altitude Kelvin temperature. The air resistance coefficient
of the spacecraft is
and the velocity
, which is less than that in airplane because of the thinner air in near space, is 200–700 km/h. Substituting the parameters
and
into Equations (
1) and (
2), the result is about 0.165 kPa.
In summary, according to analysis of the pressure distribution, temperature change and flight resistance of the aerospace vehicle, we obtain the result that the pressure range is 0–6 kPa and the minimum temperature is −55 °C when an aerospace vehicle flying. The pressure sensor for aerospace vehicle should detect a range of 0–6 kPa micro-pressure at an extreme temperature of −55 °C.
Many pressure sensors have been developed and applied in the process of spacing pressure measurement. In principle, these sensors can be divided into the following types: resistance [
5,
6,
7,
8,
9], piezoelectric [
10,
11], magnetic [
12], fiber optic [
13,
14,
15,
16], resonant [
17] and capacitive [
18,
19,
20].
Resistance sensors measure micro-pressure according to piezoresistive effect of pressure sensitive materials. Liwei Lin et al. [
5] designed a MEMS pressure sensor based on piezoresistive sensing principle. The sensor has a thickness of 2 µm, 100 µm width and a measurement range of 100 Pa with a maximum linearity error of ±1%. This sensor has been applied in aerospace for micro-pressure measurement but it is rigid. Jianli Cui et al. [
6] and Yin He et al. [
7] presented flexible pressure sensors based on CNTs-PDMS composite and m-MWNTs-PU films, respectively. These sensors are flexible but still have challenge in sensitive for micro-pressure measurement. Huang et al. [
8] produced a piezoresistive micro-pressure sensor using conductive carbon black/graphene and polymer sponge with a high sensitivity of 0.38 kPa
−1 at 0–1 kPa. Y Jung et al. [
9] proposed a piezoresistive sensor based on flexible core and four elastomers. The sensor has a high-sensitivity of 0.165 kPa
−1 in the shear direction and 0.0173 kPa
−1 in the normal direction. However, these sensors still have difficulty measuring micro-pressure for aerospace in a harsh environment (low atmospheric pressure, and high and low temperature).
Piezoelectric sensors measure micro-pressure according to piezoelectric effect of piezoelectric materials. Yu-Jen Hsu et al. [
10] and Ping Yu et al. [
11] presented flexible piezoelectric pressure sensors based on PVDF. These sensors have a high sensitivity and good flexibility but bad static characteristics of linearity and measurement range.
Many other types of sensors (magnetic [
12], fiber optic [
13,
14,
15,
16] and resonant [
17], etc.) have also been presented for micro-pressure measurement. However, these sensor still have challenges of flexibility and miniaturization.
Capacitance sensors [
18,
19,
20], which have the advantages of temperature insensitivity and micro size, have been applied to measure micro-pressure. X. Lu et al. [
18] presented a three interfacial stress capacitance sensor for planta and prosthesis pressure measurement. Lixin Chen et al. [
19] presented a
capacitive pressure tactile sensor fabricated with new materials. Shigeru Toyama et al. [
20] also presented a sheet-type shear force sensor and a measurement system based on liquid electrolyte and elastic rubber ring. However, few works discuss the possibility to aerospace vehicle application due to complicated environment (low atmospheric pressure, high and low temperature, etc.) and strict requirements (flexible, simple structure, highly sensitive, simple fabrication, reliable, etc.).
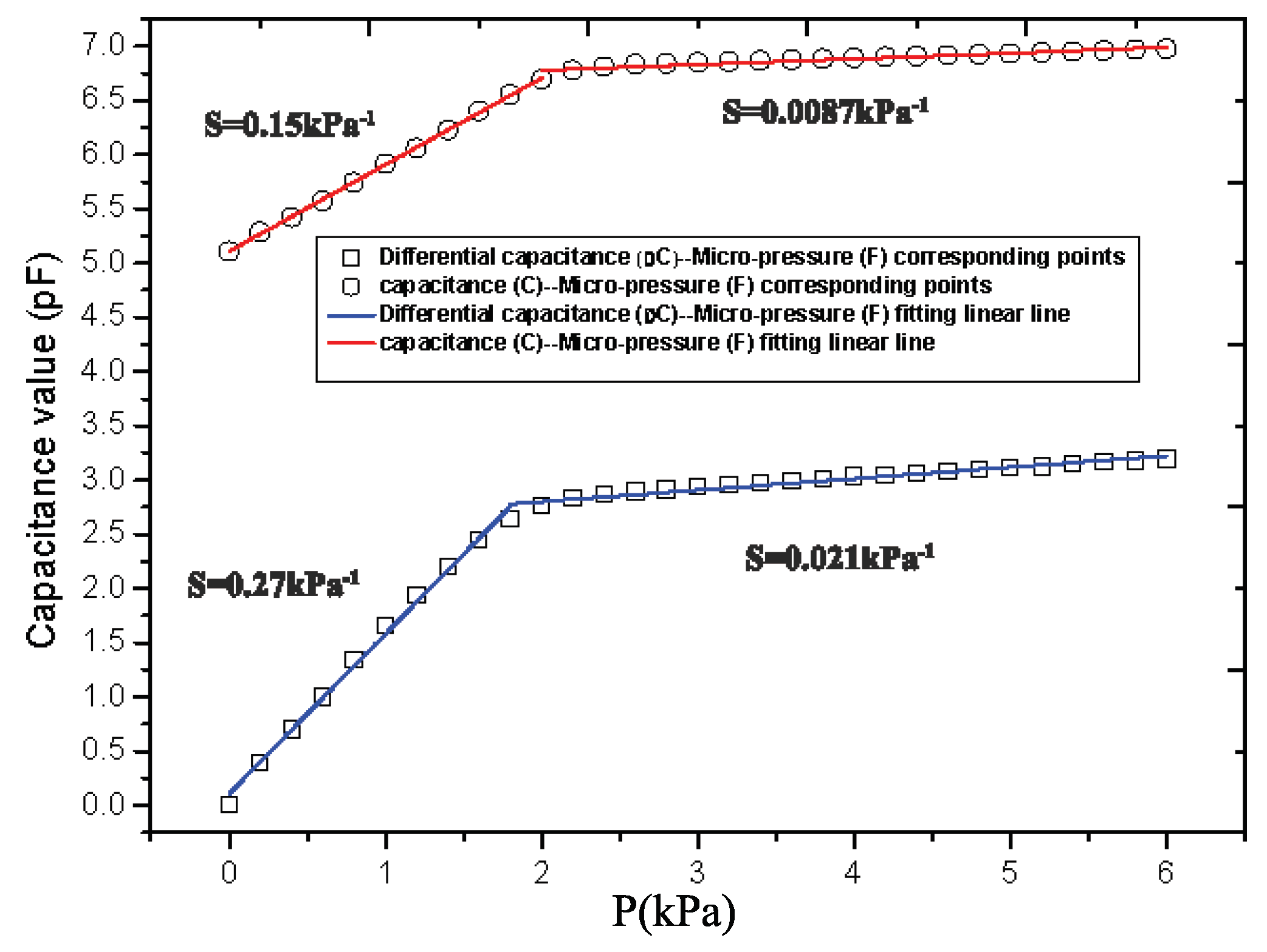
Aiming at this problem, this paper presents a sensitivity-compensated micro-pressure flexible sensor based on plate parallel capacitance and hyper-elastic plastic material for aerospace vehicle application. We propose the principle of sensitivity-compensated micro-pressure flexible sensor based on parallel plate capacitance. We present the structure design and fabrication of the sensor. We investigated the flight environment of high speed aircraft. We present the application of the sensor in this environment. We conducted experiments to obtain the static characteristic curve between micro-pressure and output capacitance. We also compared the performance of the sensor before and after sensitivity compensation to verify the effectiveness of sensitivity compensation. The conclusion is presented at the end. By using this sensor structure, our sensor has higher sensitivity (in the range of 0–2 kPa and 2–6 kPa with a sensitivity of 0.27 kPa−1 and 0.021 kPa−1), higher linearity (1.39% and 2.88%), and has potential application in aerospace vehicles, LEO satellites, near-space aircrafts, Unmanned Aerial vehicles (UAVs) and drones to measure the micro-pressure caused by high-altitude thin air.
2. Methods
2.1. The Measurement Principle of the Flexible Micro-Pressure Sensor
The micro-pressure sensor for aerospace vehicles presented in this work is based on the principle of parallel plate capacitance. The capacitance of parallel plate capacitor without considering the edge effect is , where is the overlap area between the plates, is the spacing between the parallel plates, is dielectric constant of the vacuum and is the relative dielectric permittivity of the dielectric layer.
Supposing the initial spacing between the plate of the sensor is a constant, the initial value of the capacitor is
. If the spacing between the plates changes,
, the capacitance value (
) will be
When
, that is, the range is much smaller than the initial distance between the plates, Equation (
1) can be simplified as
According to the elastic mechanics, the Young’s modulus
of an elastic material can be calculated by
where
is the stress and
means the force per unit area.
is the strain and
means relative deformation under external force. Equation (
5) can also be written as
Substituting Equation (
6) into Equation (
4), we can obtain:
The relative change in capacitance
is now
The sensitivity (
S) of the measuring method can be obtained as
The relative nonlinear error
of the measurement method based on single capacitance is
As Equation (
7) shows,
,
,
, and
can be determined if the material, structure and size of the sensor are determined. The micro-pressure
can be detected according to the output capacitance
. Therefore, we can design the micro-pressure sensor based on parallel plate capacitance according to Equation (
7).
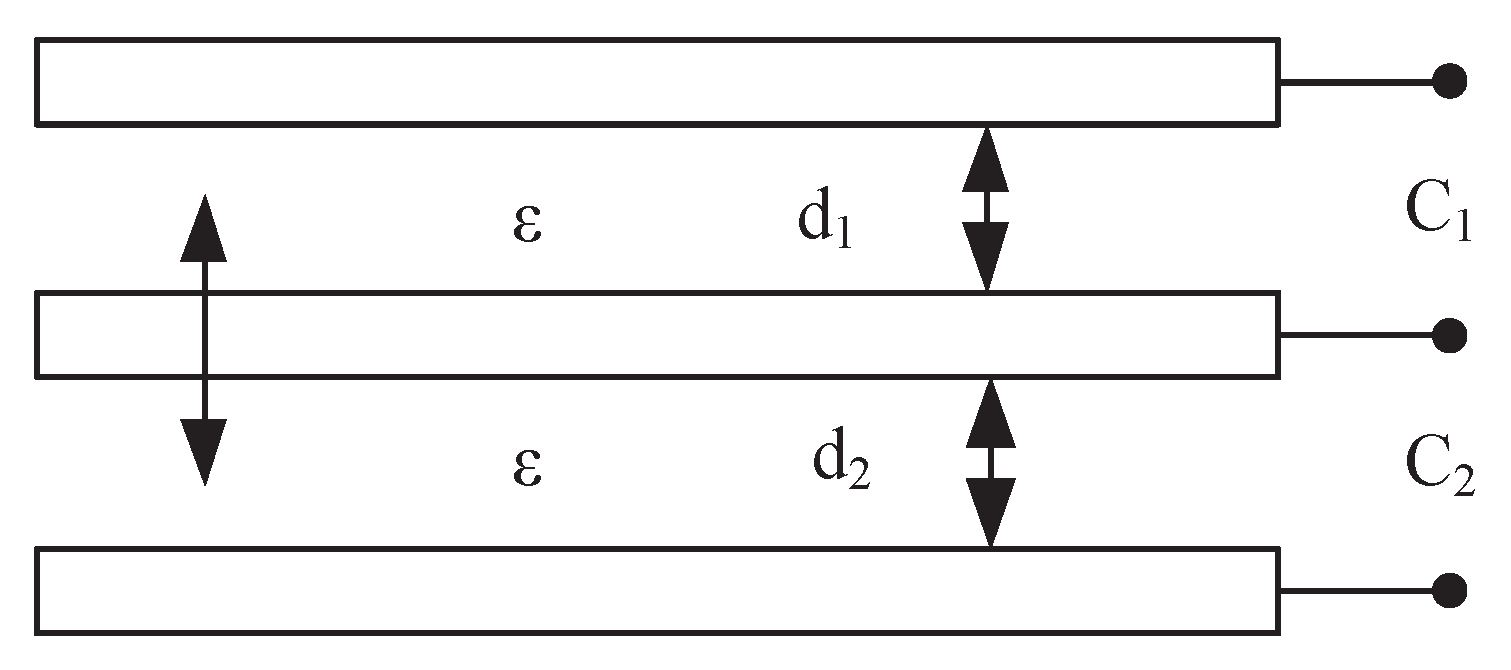
In practical applications, due to the high requirement to sensitivity and linearity in the aerospace vehicle micro-pressure measurement, the micro-pressure sensor with the principle of single parallel plate capacitance is easily influenced by electromagnetic attraction, electrostatic attraction, ambient temperature and other factors of interference. It is difficult for the single parallel plate capacitance based sensor to achieve micro-pressure measurement of high sensitivity, high linearity and high stability requirements. Therefore, to compensate sensitivity for the micro-pressure sensor based on the single parallel plate capacitance, we use a differential parallel plate capacitance structure to compensate the sensitivity, linearity and stability of the sensor. The principle of the sensitivity-compensated micro-pressure sensor based on differential parallel plate capacitance is shown in
Figure 1. If we set the differential parallel plate capacitance of the sensitivity-compensated micro-pressure sensor in initial position (i.e.,
), the upper and lower initial capacitors are equal and the spacing between the plates changes; the plate spacing between
and
becomes,
and
respectively. We can obtain
When
, that is, the range is much smaller than the initial distance between the plates, we can obtain the series expansion of the total capacitance change
Omitting the higher term, we can obtain
Substituting Equation (
6) into Equation (
14), we can obtain
Therefore, the sensitivity of the measurement method (
) of the sensitivity-compensated micro-pressure sensor based on the differential plate capacitance is
The relative nonlinear error (
) of the sensitivity-compensated micro-pressure sensor based on differential plate capacitance is
As Equation (
15) shows,
,
, and
can be determined if the material, structure and size of the sensitivity-compensated micro-pressure sensor based on parallel plate capacitance are determined. The micro-pressure (
F) can be measured according to the output capacitance (
). Comparing Equations (
9) and (
16) with Equations (
10) and (
17), we found that the sensitivity and linearity of micro-pressure sensor based on differential parallel plate capacitance are significantly higher than that of the micro-pressure sensor based on single parallel plate capacitance. Therefore, we can measure the micro-pressure with sensitivity-compensated micro-pressure sensor based on differential parallel plate capacitance.
2.2. Structure Design of the Sensitivity-Compensated Micro-Pressure Flexible Sensor
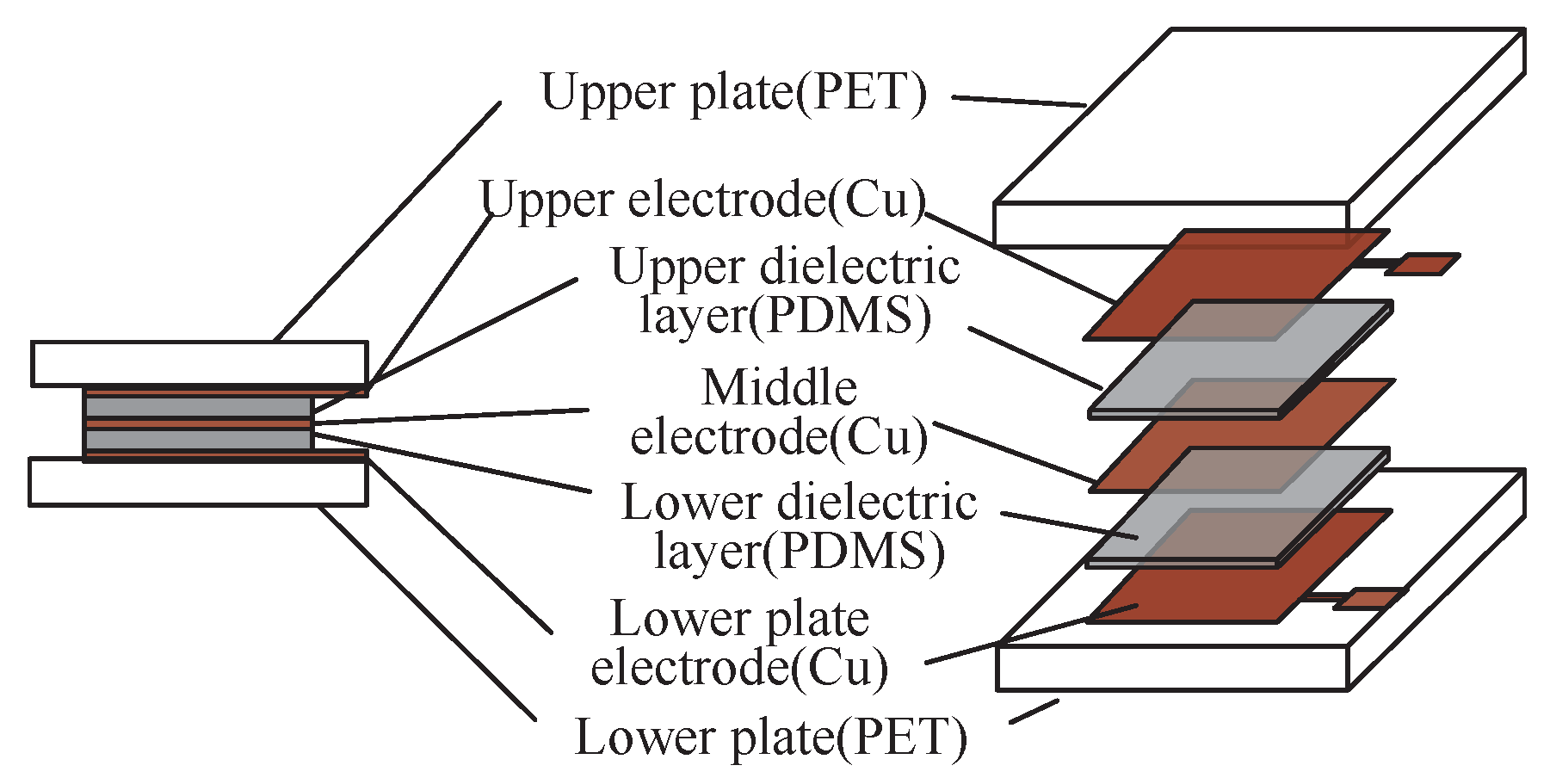
To realize the sensitivity-compensated micro-pressure flexible sensor presented above, we design a sensor, as shown in
Figure 2. The sensor is composed of upper plate, upper plate electrode, upper capacitance dielectric layer, middle electrode, lower dielectric layer, lower plate electrode and lower plate. Two electrodes are on the upper and lower substrate, respectively. An electrode is located between two electrodes separated by two dielectric layers. The upper and lower plates are made of polyethylene terephthalate (PET), because it has excellent physical and mechanical properties, high flexural strength and high Young’s modulus (4000 MPa) to deposit metal electrodes and concentrate the applied micro-pressure [
21]. The upper, middle and lower plate electrodes are copper (Cu), because copper has excellent electrical conductivity (
m) to produce the plate capacitors. The upper and lower capacitance dielectric layers are composed of polydimethylsiloxane (PDMS) because the sensitivity of the sensor can be effectively improved by using the characteristics of low Young’s modulus (0.55 MPa) with high mass ratio [
22] and, for many aeronautical applications, pressure sensors that can be applied on curved surfaces, e.g., on airfoil models, are needed [
23]. The working temperature ranges of PDMS, Cu, and PET are −45 °C to 200 °C, up to 1083 °C, and −70 °C to 86 °C, respectively.
Considering the requirement for miniaturization of our sensor, we analyzed the effect of physical dimensions on sensor sensitivity. The initial capacitance value of sensor (
) is:
where
A is the overlap area between the plates,
is the initial distance between the parallel plates,
is dielectric constant of the vacuum and
is the relative dielectric permittivity of the dielectric layer. When the sensor is subjected to a micro-pressure, the distance between the parallel plates decreases,
. The capacitance
can be written as
The predicted pressure (
P) of the thin atmosphere can be converted into force (
F) by the pressure formula:
By substituting
F into the definition of Young’s modulus of PDMS, we have
By substituting
into Equation (
19), we have
The sensitivity of the sensor can be written as
When
, the range is much smaller than the initial distance between the plates. Thus,
Similarly, the sensitivity can be written as
The output capacitance of the sensor is related to the Young’s modulus of the dielectric layer (), the thickness of the dielectric layer () and the overlap area of the dielectric layer (A). The lower the Young’s modulus () gets, the higher sensitivity of the sensor (S) will be. The smaller the thickness of the dielectric layer () is, the smaller the output capacitance of the sensor will be, and, under the same Young’s modulus, the higher the sensitivity (S) will be. The smaller the dielectric layer area (A) is, the smaller the changes of output capacitance will be. Therefore, considering the requirements of miniaturization, flexibility and the application scenarios of the sensor, we designed the overlapping area (A), the thickness () of the dielectric layer, and the PDMS mixing ratio to be 10 mm × 10 mm, 500 µm, and , respectively.
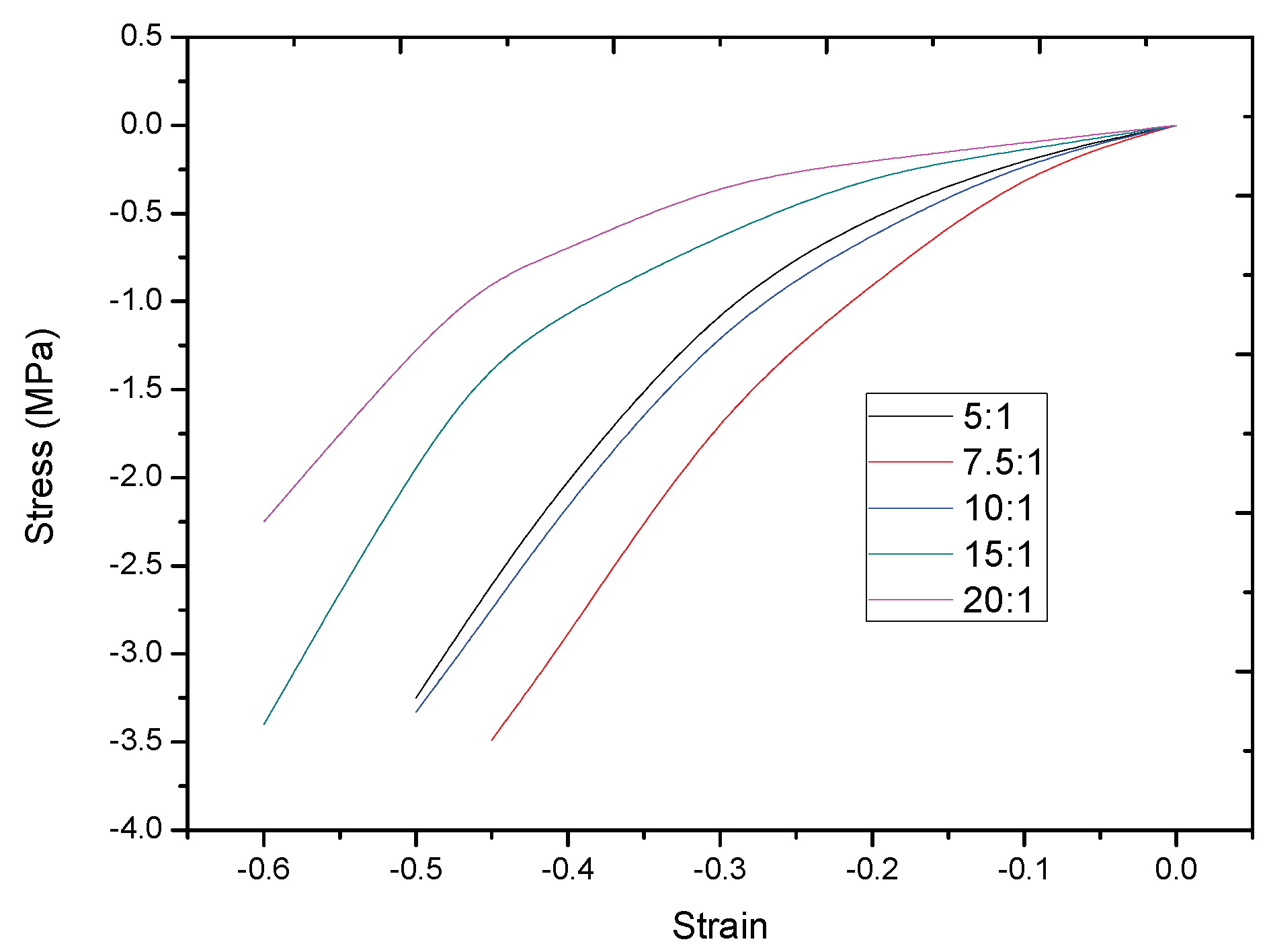
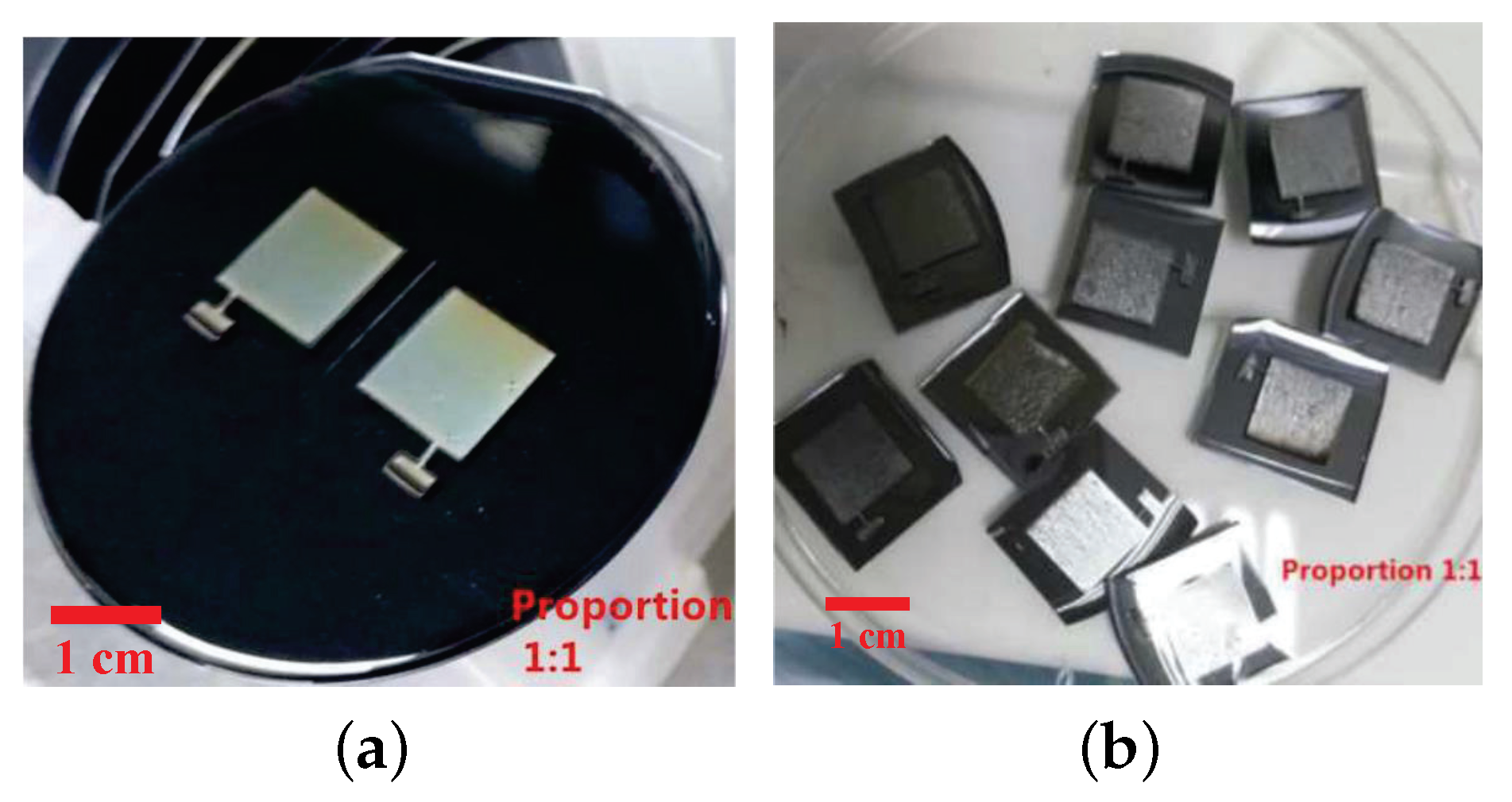
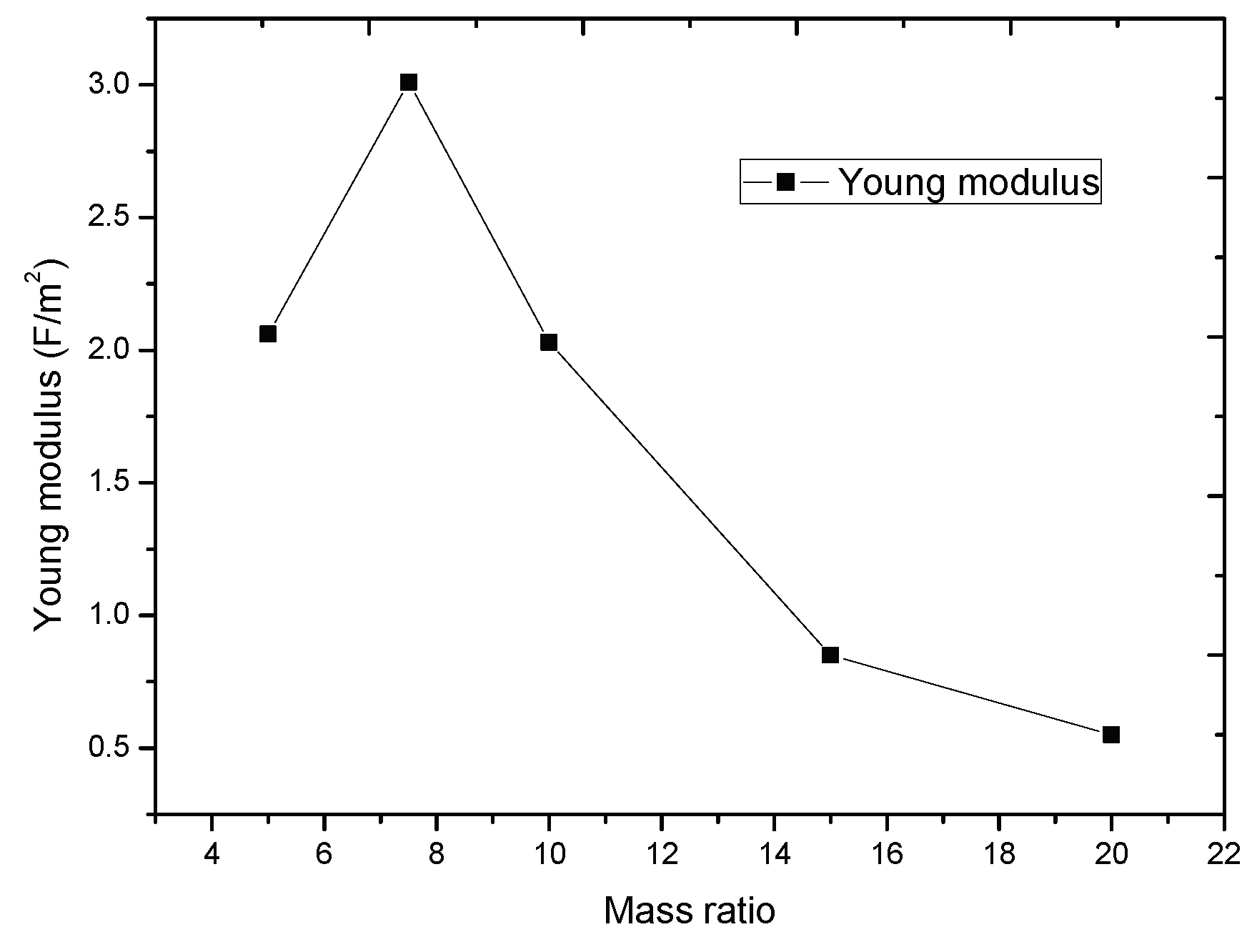
Compared with other flexible materials (PET, PI, PC, PMMA, etc.), we chose PDMS (Sylgard 184, Dow Corning Co., Midland, MI, USA) as the dielectric layer because PDMS has a low Young’s modulus. The specific Young’s modulus of PDMS is related with the ratio of the base and curing. To chose a proper ratio between the base and curing of PDMS, we tested the stress–strain relation of uniaxial tensile compression of PDMS with different base material and curing material ratio (see
Figure 3). From the result, we obtained that the modulus will be smaller if the ratio is bigger. In this work, we chose a small ratio of
to make the sensor more sensitive, and the Young’s modulus is 0.55 MPa.
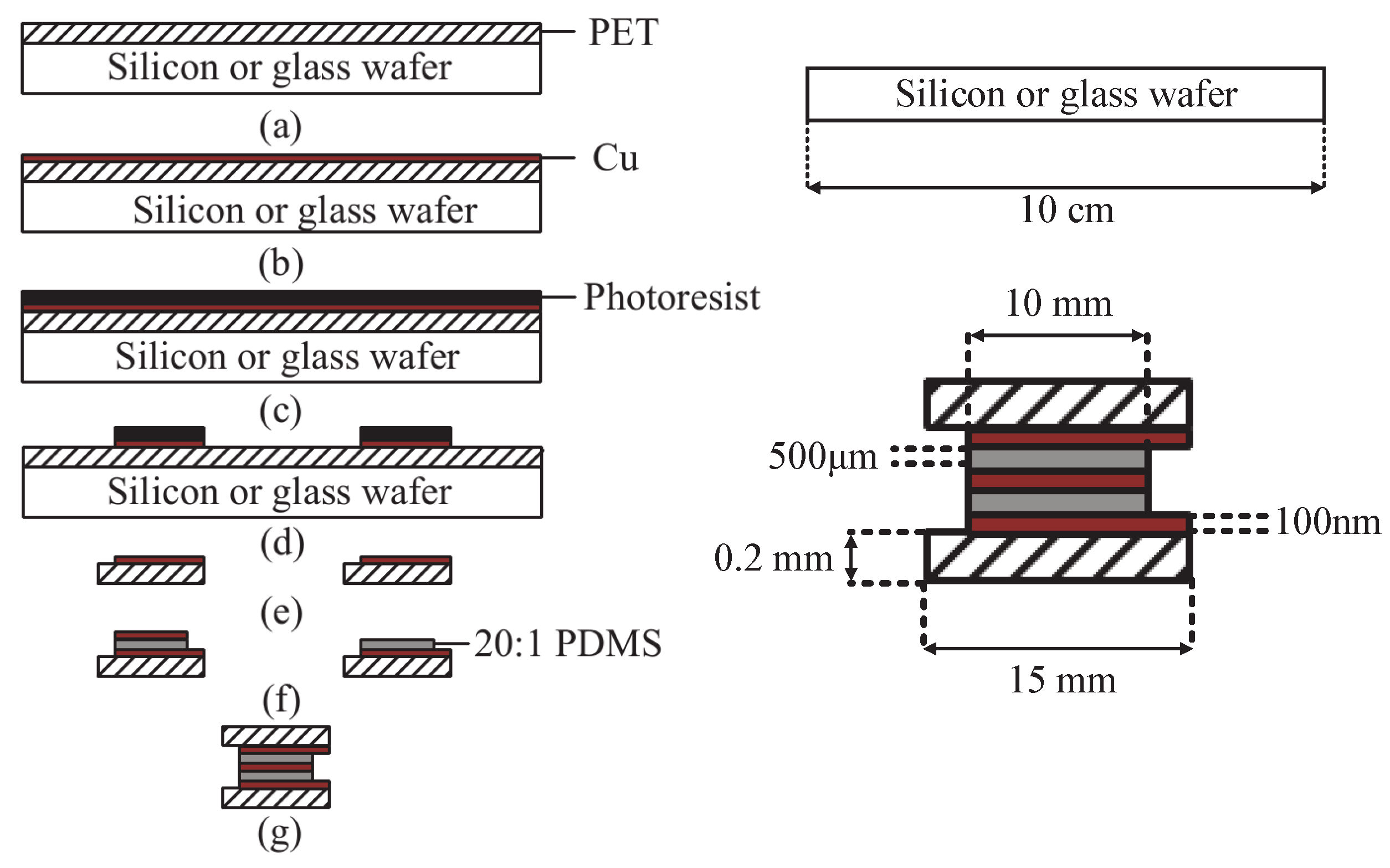
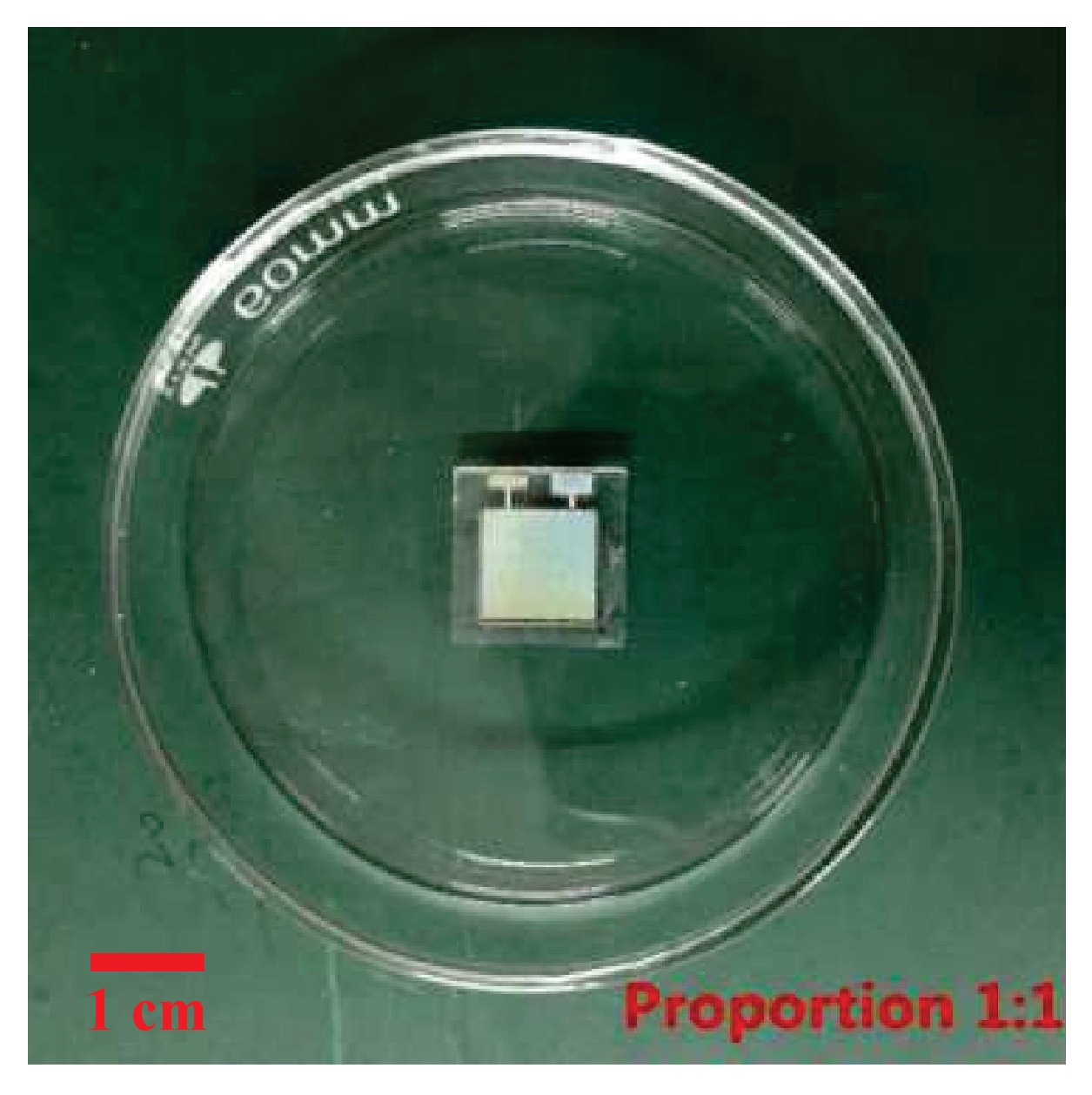
Because the sensor will be applied in a narrow space of aerospace vehicle and suffer a micro-pressure in near space, the size of the sensor should meet the requirement of miniaturization and flexibility. Compared with decreasing the thickness of the dielectric layer (), it is more difficult to measure the tiny output capacitance changes when decreasing the dielectric layer area (A). However, we cannot satisfy the miniaturization requirement of the sensor if the area of the dielectric layer (A) is too large. Comprehensively considering the requirement of miniaturization and high sensitivity, we selected the dielectric layer area (A) and the thickness () with the size of 1 cm × 1 cm and 500 µm, respectively.
We chose polyethylene terephthalate (PET) as the upper and lower substrates because PET has a high Young’s modulus, and can reduce the absorption of the micro-pressure applied to the sensor. The upper and lower substrates were designed for data measurement and performance analysis with the size of 1.5 cm × 1.5 cm and 0.2 mm, respectively, because of the requirement of the follow-up measurements with lead wire [
24]. The electrodes were prepared by MEMS preparation process, and the photolithography precision is up to 0.3 µm. We used a high-precision cutter to cut PET with accuracy up to 0.5 mm.
Therefore, we used the 20 : 1 mass ratio of PDMS as the dielectric layer of the micro-pressure sensor, which has a low Young’s modulus (E) of 0.55 × 106 F/m2. The upper and lower capacitance dielectric has an area (A) of 1.0 cm × 1.0 cm and thickness () of 500 µm. The area of electrode is same with the dielectric layer 1.0 cm × 1.0 cm and the thickness of the electrode is 100 nm cite. The upper and lower substrates were designed with the size of 1.5 cm × 1.5 cm and 0.2 mm, respectively, to facilitate lead wire.

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}












