An Improved Roadside Parking Space Occupancy Detection Method Based on Magnetic Sensors and Wireless Signal Strength


Abstract
:1. Introduction
2. Characteristics of Magnetic Signals and Received Signal Strengths
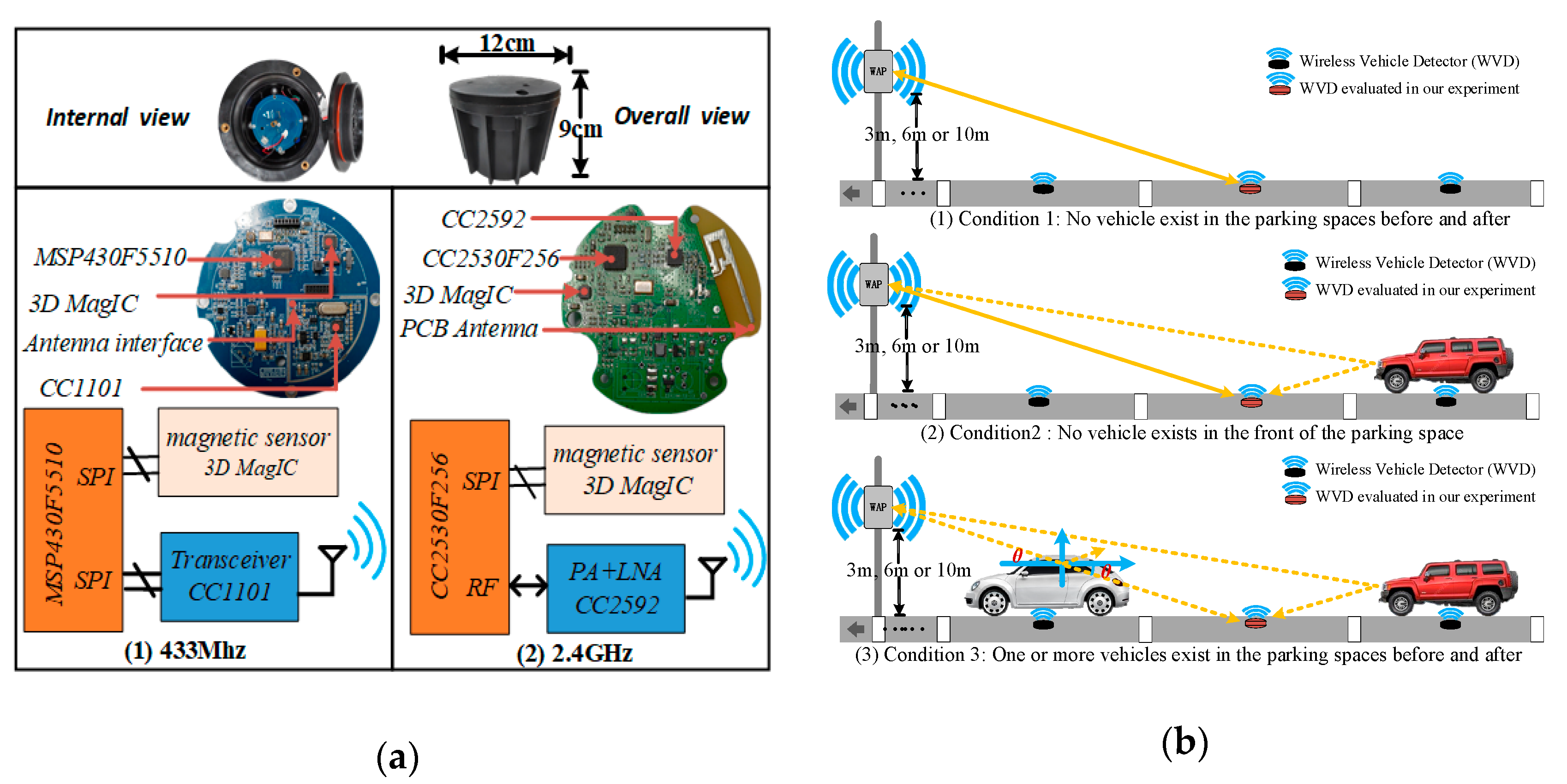
2.1. System Overview
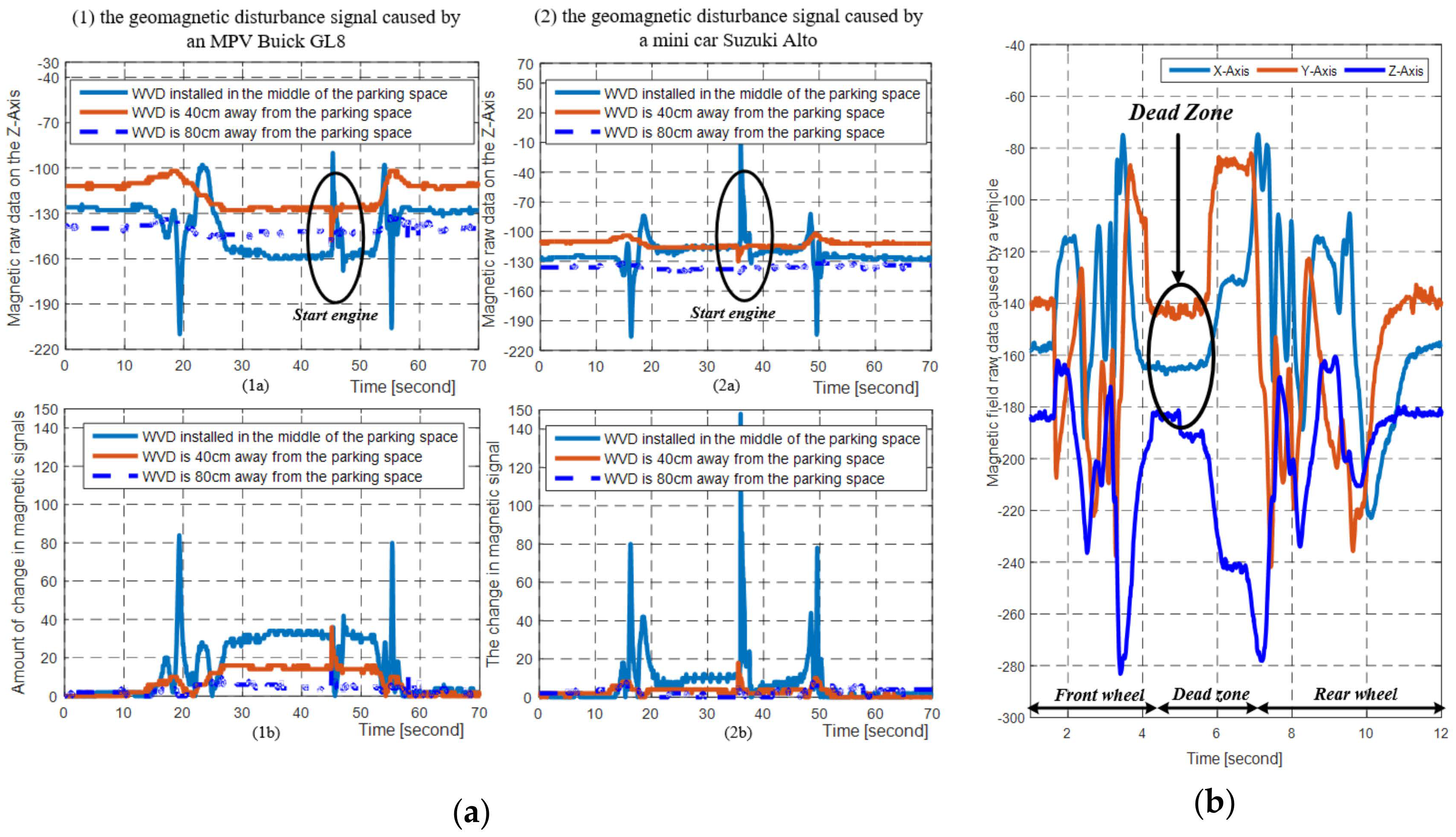
2.2. Defects of WVD Based on Single Magnetic Sensor
2.3. Radio Signal Mathematical Model
3. Implementation of Our Proposed Method
3.1. Hardware Setup of WVD
3.2. Characteristic Analysis of Magnetic Signals and Received Signal Strengths
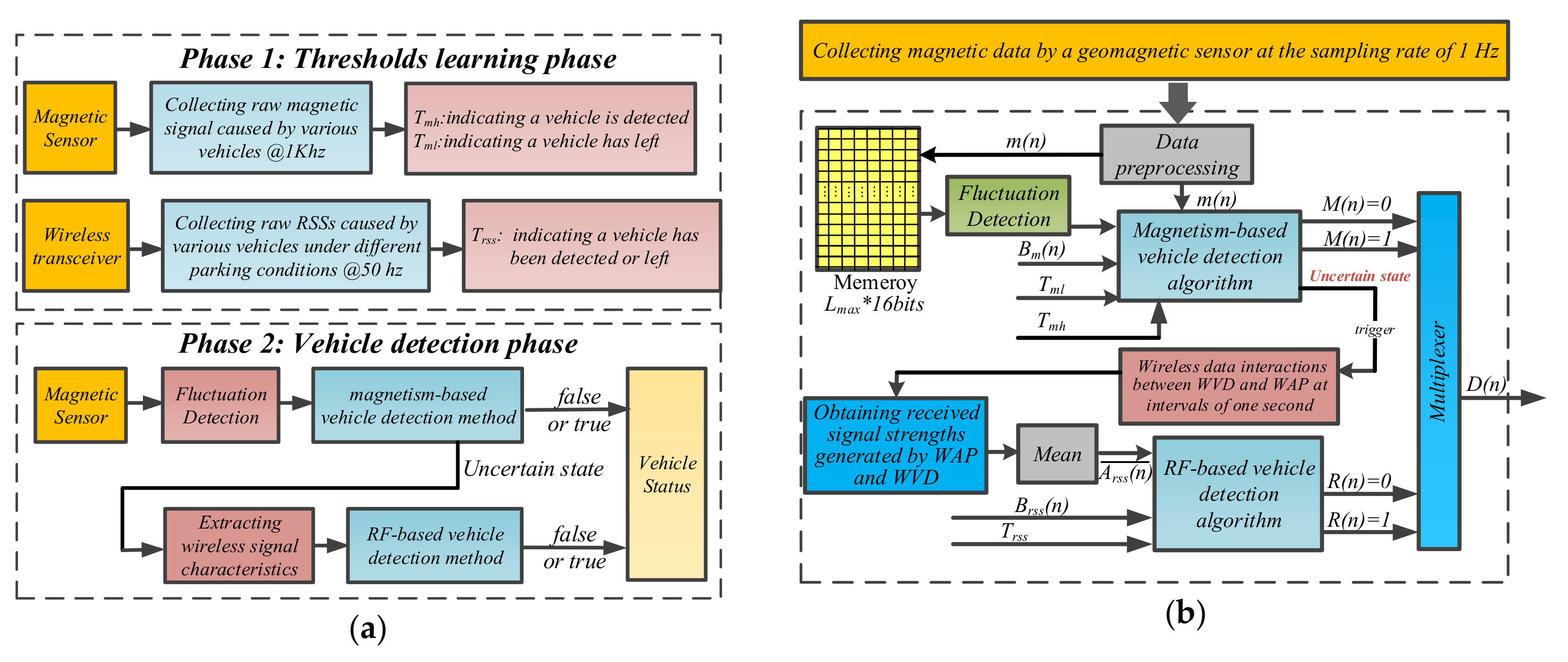
3.3. Overview of Our Proposed Method
3.3.1. Phase 1
3.3.2. Phase 2
3.4. Implementation of Our Proposed Method
3.4.1. Data Preprocessing
3.4.2. Fluctuation Detection
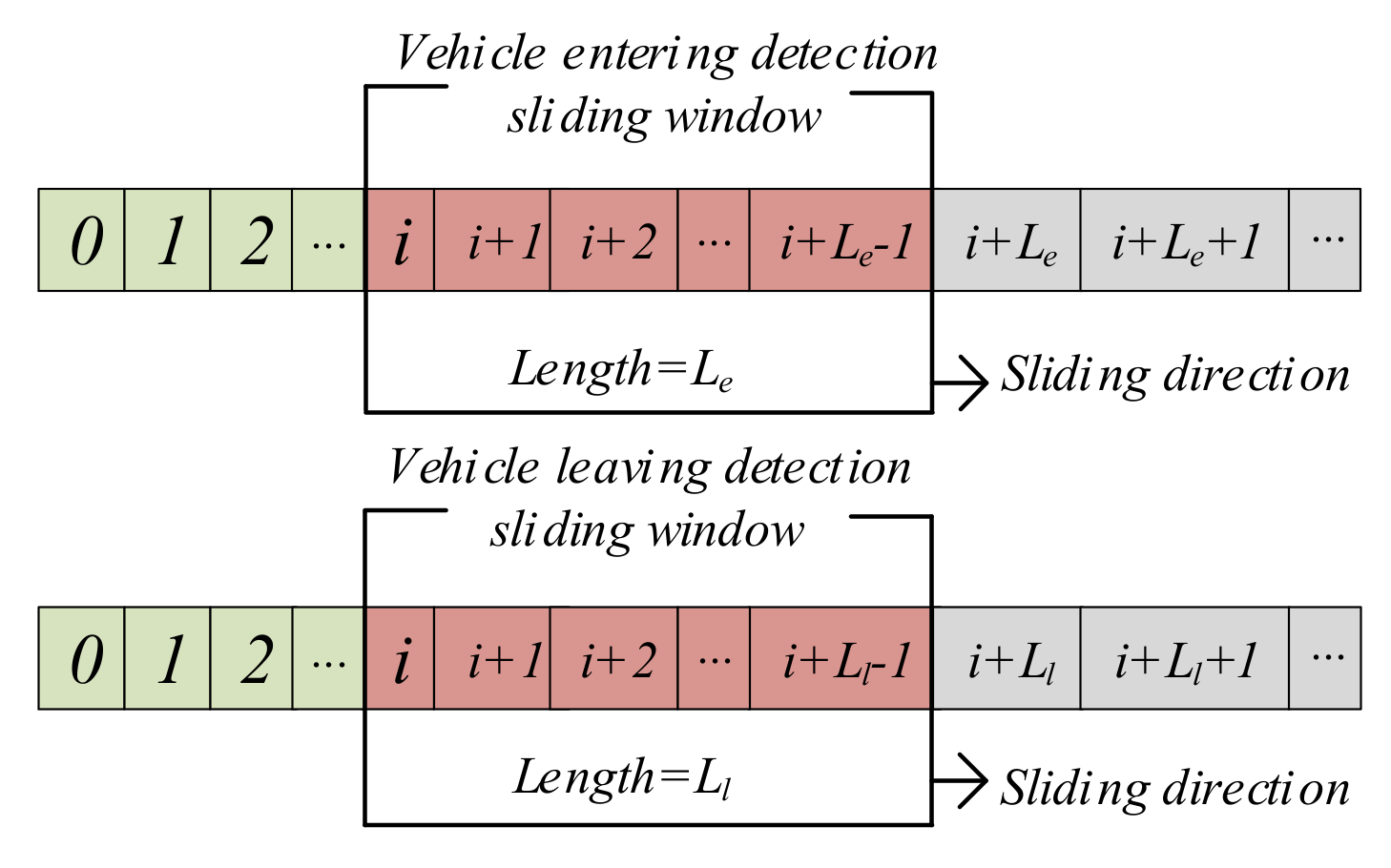
3.4.3. Magnetism-Based Method Design
3.4.4. RF-Based Method Design
3.4.5. Two Methods Fusion Design
3.5. Adaptive Adjustment Algorithm for Reference Baselines
3.5.1. Magnetism-Based Method Reference Background Calculation
3.5.2. RF-Based Method Reference Background Calculation
4. Results
4.1. Experimental Results
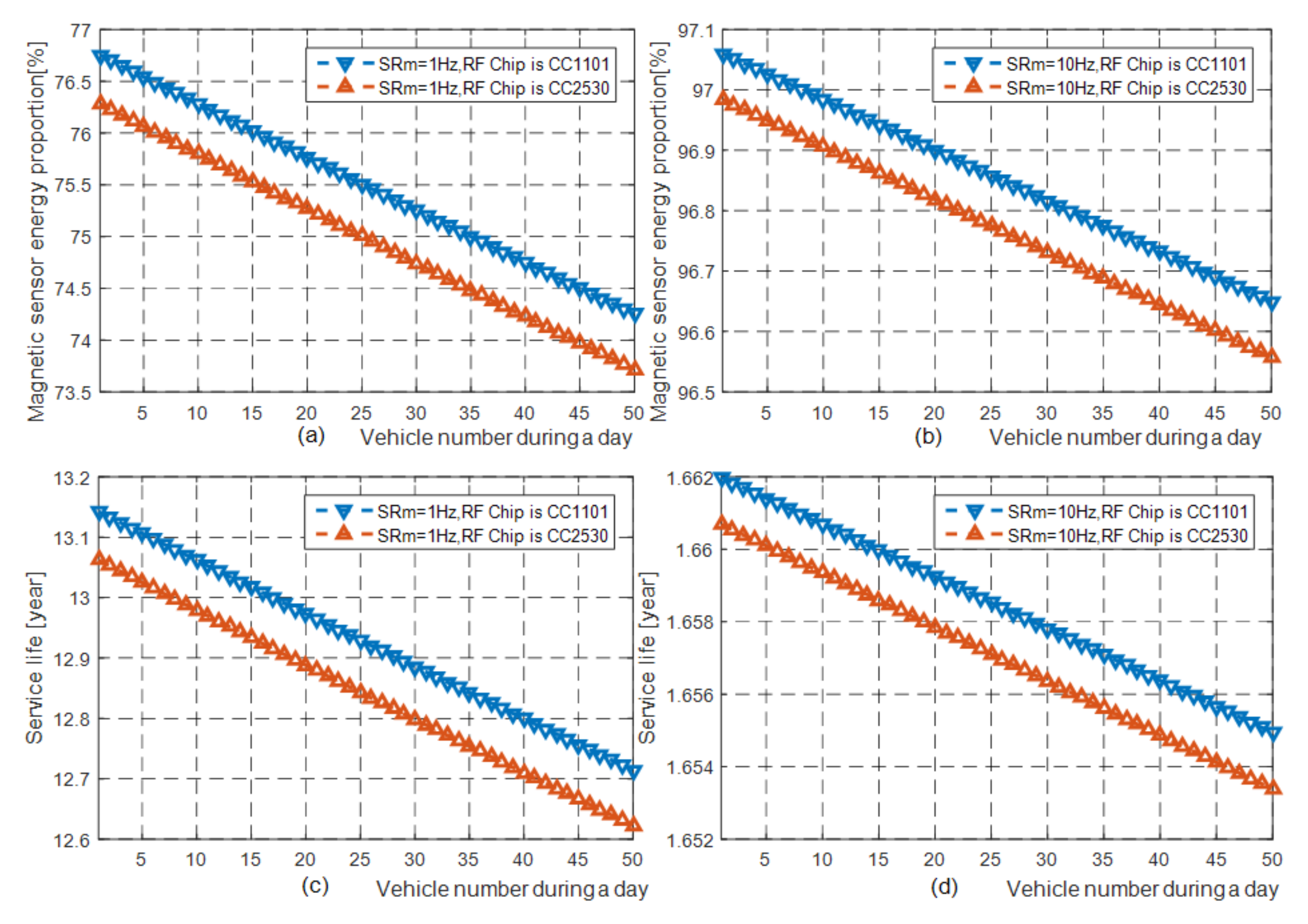
4.2. Power Consumption Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Pham, T.N.; Tsai, M.-F.; Nguyen, D.B.; Dow, C.-R.; Deng, D.-J. A Cloud-Based Smart-Parking System Based on Internet-of-Things Technologies. IEEE Access 2015, 3, 1581–1591. [Google Scholar] [CrossRef]
- Kotb, A.O.; Shen, Y.-C.; Huang, Y. Smart Parking Guidance, Monitoring and Reservations: A Review. IEEE Intell. Transp. Syst. Mag. 2017, 9, 6–16. [Google Scholar] [CrossRef]
- Marszalek, Z.; Zeglen, T.; Sroka, R.; Gajda, J. Inductive Loop Axle Detector based on Resistance and Reactance Vehicle Magnetic Profiles. Sensors 2018, 18, 2376. [Google Scholar] [CrossRef] [PubMed]
- Youngtae, J.; Inbum, J. Analysis of Vehicle Detection with WSN-Based Ultrasonic Sensors. Sensors 2014, 14, 14050–14069. [Google Scholar]
- Lirong, L.; Yunmei, Z.; Shanshan, L.; Chen, Y.; Tianqi, L.; Xinyuan, X. Design of intelligent infrared vehicle detect system based on ZigBee. In Proceedings of the 2015 Chinese Automation Congress (CAC), Wuhan, China, 27–29 November 2015; pp. 1845–1849. [Google Scholar]
- Shih, S.-E.; Tsa, W.-H. A convenient vision-based system for automatic detection of parking spaces in indoor parking lots using wide-angle cameras. IEEE Trans. Veh. Technol. 2014, 63, 2521–2532. [Google Scholar] [CrossRef]
- Huang, C.; Lu, R.; Lin, X.; Shen, X. Secure Automated Valet Parking: A Privacy-Preserving Reservation Scheme for Autonomous Vehicles. IEEE Trans. Veh. Technol. 2018, 67, 11169–11180. [Google Scholar] [CrossRef]
- Wang, X.; Xu, L.; Sun, H.; Xin, J.; Zheng, N. On-road vehicle detection and tracking using MMW radar and mono vision fusion. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2075–2084. [Google Scholar] [CrossRef]
- Trigona, C.; Andò, B.; Sinatra, V.; Vacirca, C.; Rossino, E.; Palermo, L.; Kurukunda, S.; Baglio, S. Implementation and characterization of a smart parking system based on 3-axis magnetic sensors. In Proceedings of the 2016 IEEE International Instrumentation and Measurement Technology Conference, Taipei, Taiwan, 23–26 May 2016; pp. 1–6. [Google Scholar]
- Zhang, Z.; Tao, M.; Yuan, H. A parking occupancy detection algorithm based on AMR sensor. IEEE Sens. J. 2015, 15, 1261–1269. [Google Scholar] [CrossRef]
- Jian, W.; Bin, X. Design and verification of parking space detection based on AMR sensor. In Proceedings of the 2017 4th International Conference on Transportation Information and Safety (ICTIS), Banff, AB, Canada, 8–10 August 2017; pp. 968–973. [Google Scholar]
- Zhu, H.; Feng, S.; Yu, F. Parking Detection Method Based on Finite-State Machine and Collaborative Decision-Making. IEEE Sens. J. 2018, 18, 9829–9839. [Google Scholar] [CrossRef]
- Zhu, H.; Yu, F. A Vehicle Parking Detection Method Based on Correlation of Magnetic Signals. Int. J. Distrib. Sens. Netw. 2015, 11, 1–13. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, X.; Yuan, H.; Yu, F. A street parking system using wireless sensor networks. Int. J. Distrib. Sens. Netw. 2013, 9, 1–10. [Google Scholar] [CrossRef]
- Dong, H.; Wang, X.; Zhang, C.; He, R.; Jia, L.; Qin, Y. Improved Robust Vehicle Detection and Identification Based on Single Magnetic Sensor. IEEE Access 2018, 6, 5247–5255. [Google Scholar] [CrossRef]
- Sifuentes, E.; Casas, O.; Pallas-Areny, R. Wireless Magnetic Sensor Node for Vehicle Detection with Optical Wake-Up. IEEE Sens. J. 2011, 11, 1669–1676. [Google Scholar] [CrossRef]
- Hostettler, R.; Djuric, P.M. Vehicle Tracking Based on Fusion of Magnetometer and Accelerometer Sensor Measurements with Particle Filtering. IEEE Trans. Veh. Technol. 2015, 64, 1. [Google Scholar] [CrossRef]
- Al-Husseiny, A.; Youssef, M. RF-Based Traffic Detection and Identification. In Proceedings of the 2012 IEEE Vehicular Technology Conference (VTC Fall), Quebec City, QC, Canada, 3–6 September 2012; pp. 1–5. [Google Scholar]
- Kassem, N.; Kosba, A.E.; Youssef, M. RF-Based Vehicle Detection and Speed Estimation. In Proceedings of the 2012 IEEE Vehicular Technology Conference (VTC Spring), Yokohama, Japan, 6–9 May 2012; pp. 1–5. [Google Scholar]
- Kumar, D.P.; Amgoth, T.; Annavarapu, C.S.R. Machine learning algorithms for wireless sensor networks: A survey. Inf. Fusion 2019, 49, 1–25. [Google Scholar] [CrossRef]
- Kavitha, M.G.; Sendhilnathan, S. Hidden and exposed nodes in wireless sensor networks. Adv. Nat. Appl. Sci. 2017, 11, 402–408. [Google Scholar]
- Markevicius, V.; Navikas, D.; Zilys, M.; Andriukaitis, D.; Valinevicius, A.; Cepenas, M. Dynamic vehicle detection via the use of magnetic field sensors. Sensors 2016, 16, 78. [Google Scholar] [CrossRef] [PubMed]
- Bao, X.; Li, H.; Xu, D.; Jia, L.; Ran, B.; Rong, J. Traffic Vehicle Counting in Jam Flow Conditions Using Low-Cost and Energy-Efficient Wireless Magnetic Sensors. Sensors 2016, 16, 1868. [Google Scholar] [CrossRef] [PubMed]
- FRIIS Transmission Equation. Available online: https://en.wikipedia.org/wiki/Friis_transmission_equation (accessed on 5 January 2019).
- Log-Distance Path Loss Model. Available online: https://en.wikipedia.org/wiki/Log-distance_path_loss_model (accessed on 5 January 2019).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Description | Value |
|---|---|---|
| vehicle entering decision threshold of magnetism-based detection method | 20 | |
| vehicle leaving decision threshold of magnetism-based detection method | 5 | |
| vehicle decision threshold of RF-based vehicle detection method | 5 |
| Case | Actual Number | Detected Number | RF-Based Method Activated Number | Detection Accuracy | ||||
|---|---|---|---|---|---|---|---|---|
| 50 m | 100 m | 50 m | 100 m | 50 m | 100 m | 50 m | 100 m | |
| no vehicle on both front and behind | 199 | 175 | 199 | 174 | 15 | 18 | 100% | 99.42% |
| some vehicles on the behind | 202 | 195 | 201 | 195 | 21 | 18 | 99.50% | 100% |
| some vehicles on both front and behind | 188 | 169 | 187 | 168 | 17 | 15 | 99.46% | 99.46% |
| overall | 589 | 539 | 587 | 537 | 53 | 51 | 99.66% | 99.62% |
| Parameters | Description | Value |
|---|---|---|
| MCU standby current | 1 μA | |
| Magnetic sensor standby current | 1 μA | |
| CC2530 or CC1101 standby current | 1 μA | |
| Magnetic sensor average operating current when the number of circuit oscillation cycles of the chip is 128 | 0.1 mA | |
| Magnetic sensor operating time when the clock of sensor runs at nominally 32 MHz | 1 ms | |
| Activation probability of RF-based method according to Table 2 | 9.2% | |
| Received signal strength sampling times by the RF-based method | 3 | |
| CC1101 or CC2530 average transmit current | 30 or 154 mA | |
| CC1101 or CC2530 wireless data transmission time when data length is 32 bytes, and the data rates are both 250 kbps | 2 ms | |
| CC1101 or CC2530 average operating current in receive mode | 18 or 30 mA | |
| Number of heartbeat packets per day, and the heartbeat packet transmission period of wireless vehicle detector is 5 minutes. | 288 | |
| Wireless data reception window length | 500 ms |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lou, L.; Zhang, J.; Xiong, Y.; Jin, Y. An Improved Roadside Parking Space Occupancy Detection Method Based on Magnetic Sensors and Wireless Signal Strength. Sensors 2019, 19, 2348. https://doi.org/10.3390/s19102348
Lou L, Zhang J, Xiong Y, Jin Y. An Improved Roadside Parking Space Occupancy Detection Method Based on Magnetic Sensors and Wireless Signal Strength. Sensors. 2019; 19(10):2348. https://doi.org/10.3390/s19102348
Chicago/Turabian StyleLou, Liangliang, Jinyi Zhang, Yong Xiong, and Yanliang Jin. 2019. "An Improved Roadside Parking Space Occupancy Detection Method Based on Magnetic Sensors and Wireless Signal Strength" Sensors 19, no. 10: 2348. https://doi.org/10.3390/s19102348
APA StyleLou, L., Zhang, J., Xiong, Y., & Jin, Y. (2019). An Improved Roadside Parking Space Occupancy Detection Method Based on Magnetic Sensors and Wireless Signal Strength. Sensors, 19(10), 2348. https://doi.org/10.3390/s19102348