SAFE-MAC: Speed Aware Fairness Enabled MAC Protocol for Vehicular Ad-hoc Networks †


Abstract
:1. Introduction
1.1. Contributions of the Paper
- We propose and design a Speed Aware Fairness Enabled MAC (SAFE-MAC) protocol to ensure fairness in V2I communications.
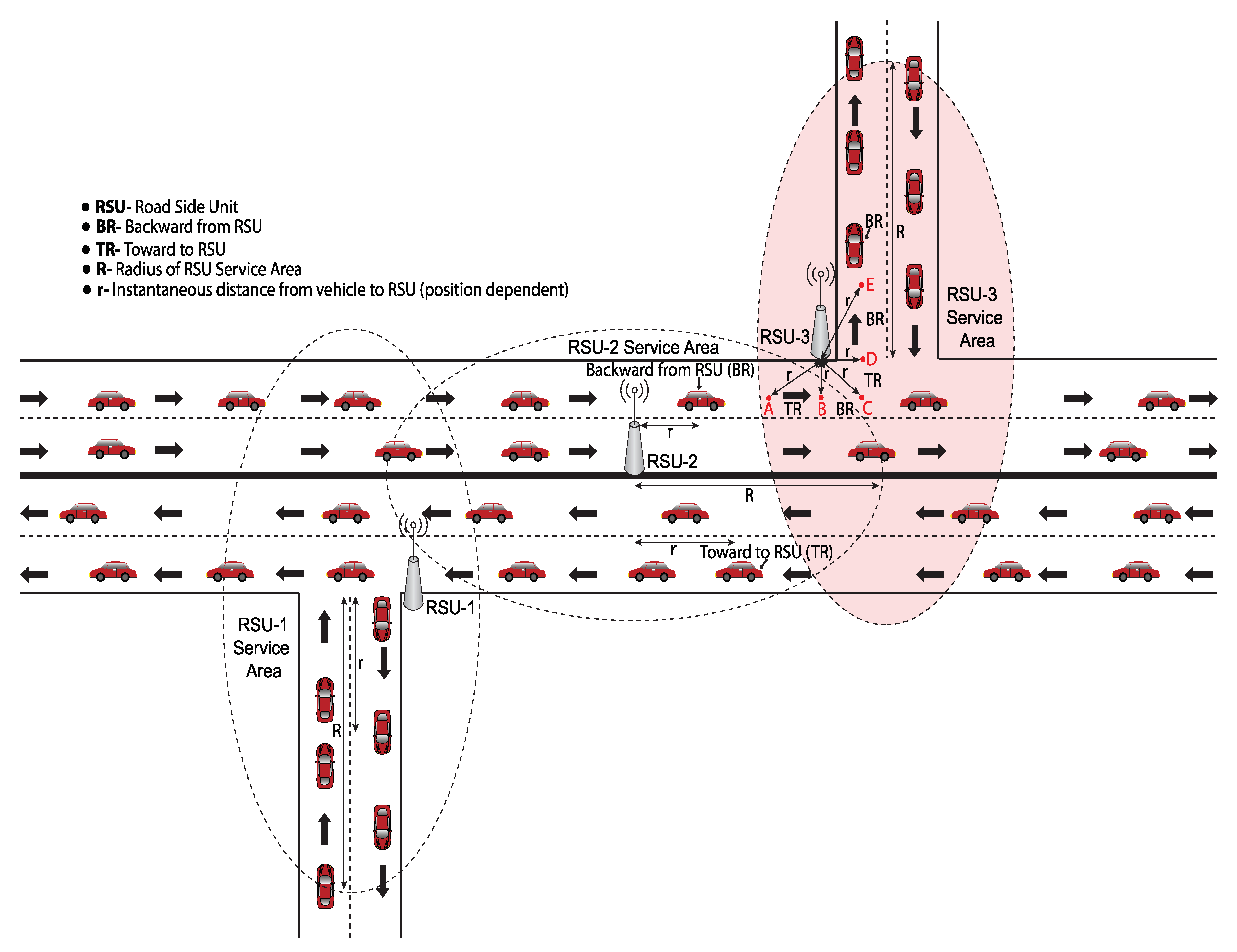
- We introduce a new algorithm to calculate residence time of a vehicle in the service area of a RSU using direction, position, and speed of vehicles for both straight road and intersection road scenarios.
- We propose a new batch selection and update algorithm which uses instantaneous residence time of the vehicles to ensure proportional fairness.
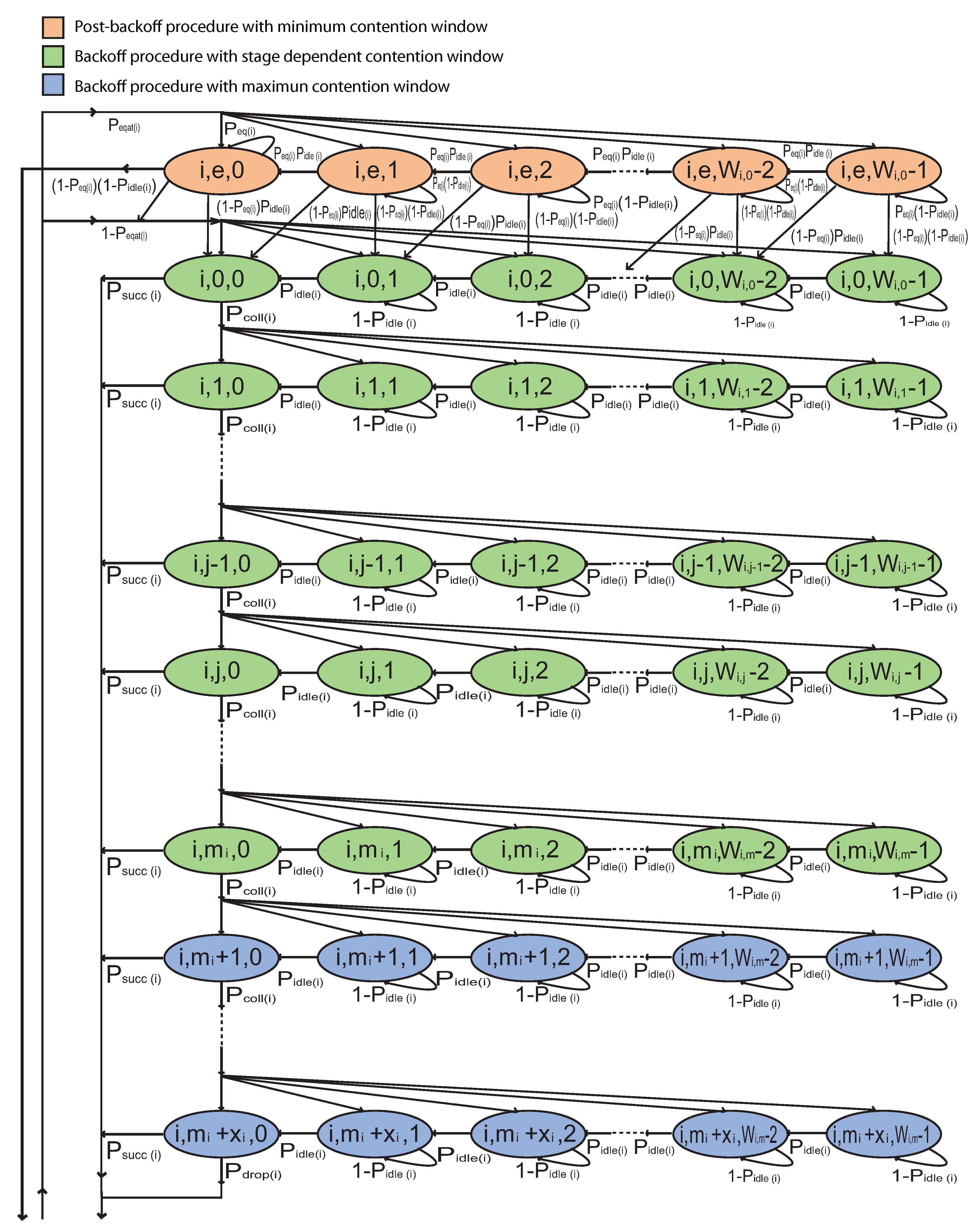
- We develop an analytical model using 2-D Markov chain and derive some equations from this model for the proposed SAFE-MAC protocol under consideration for both saturated and non-saturated conditions of the vehicle queue.
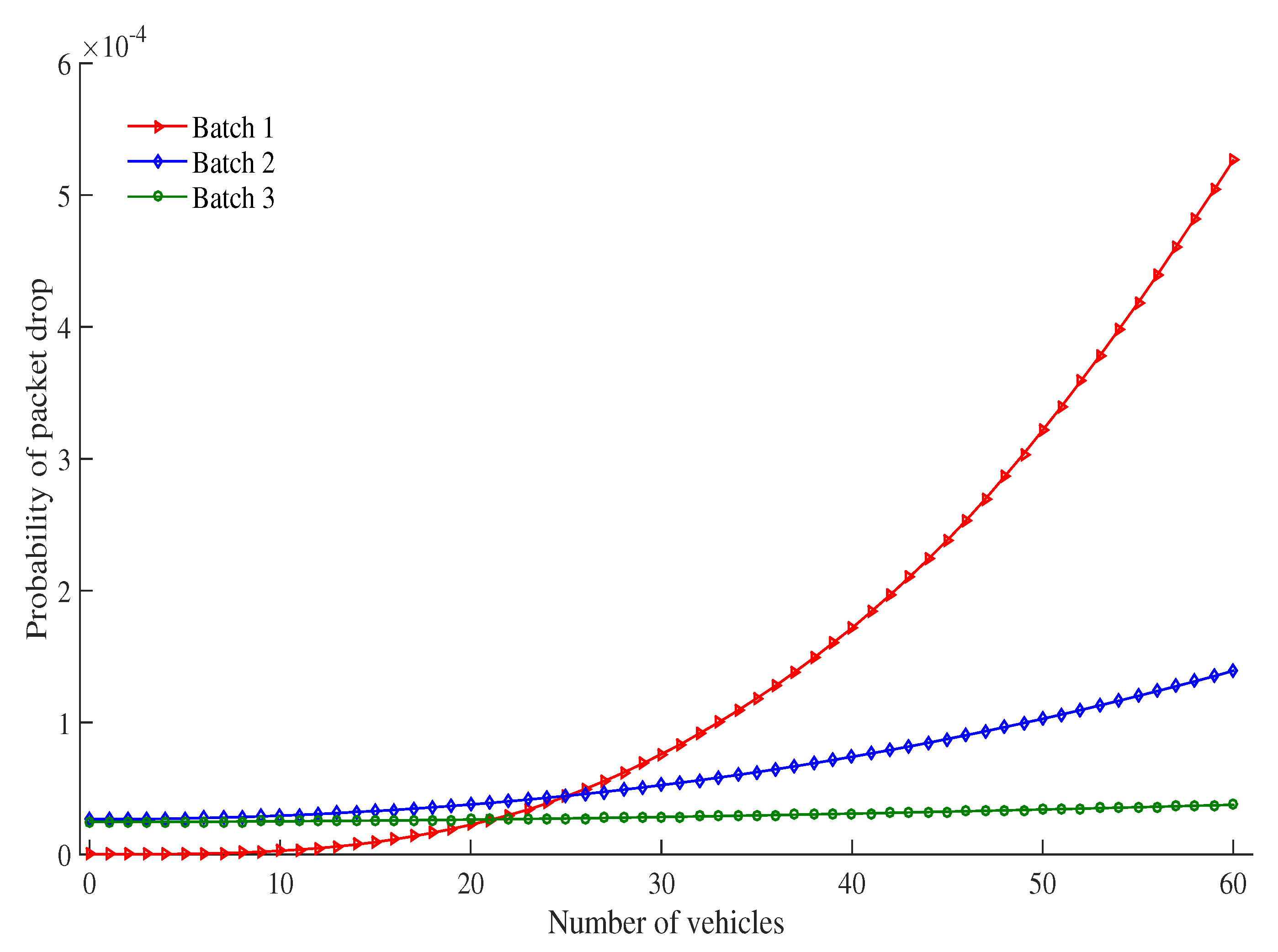
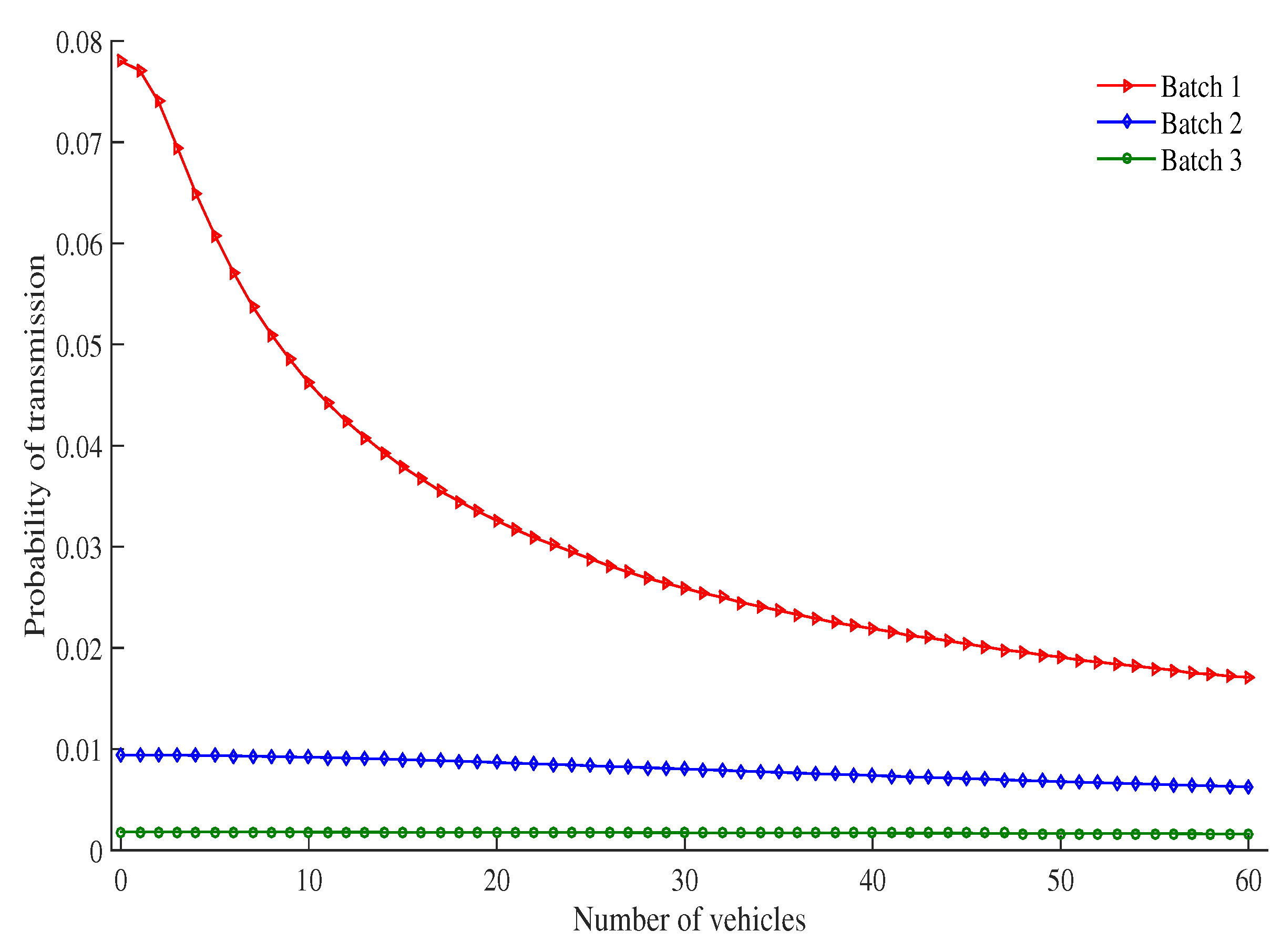
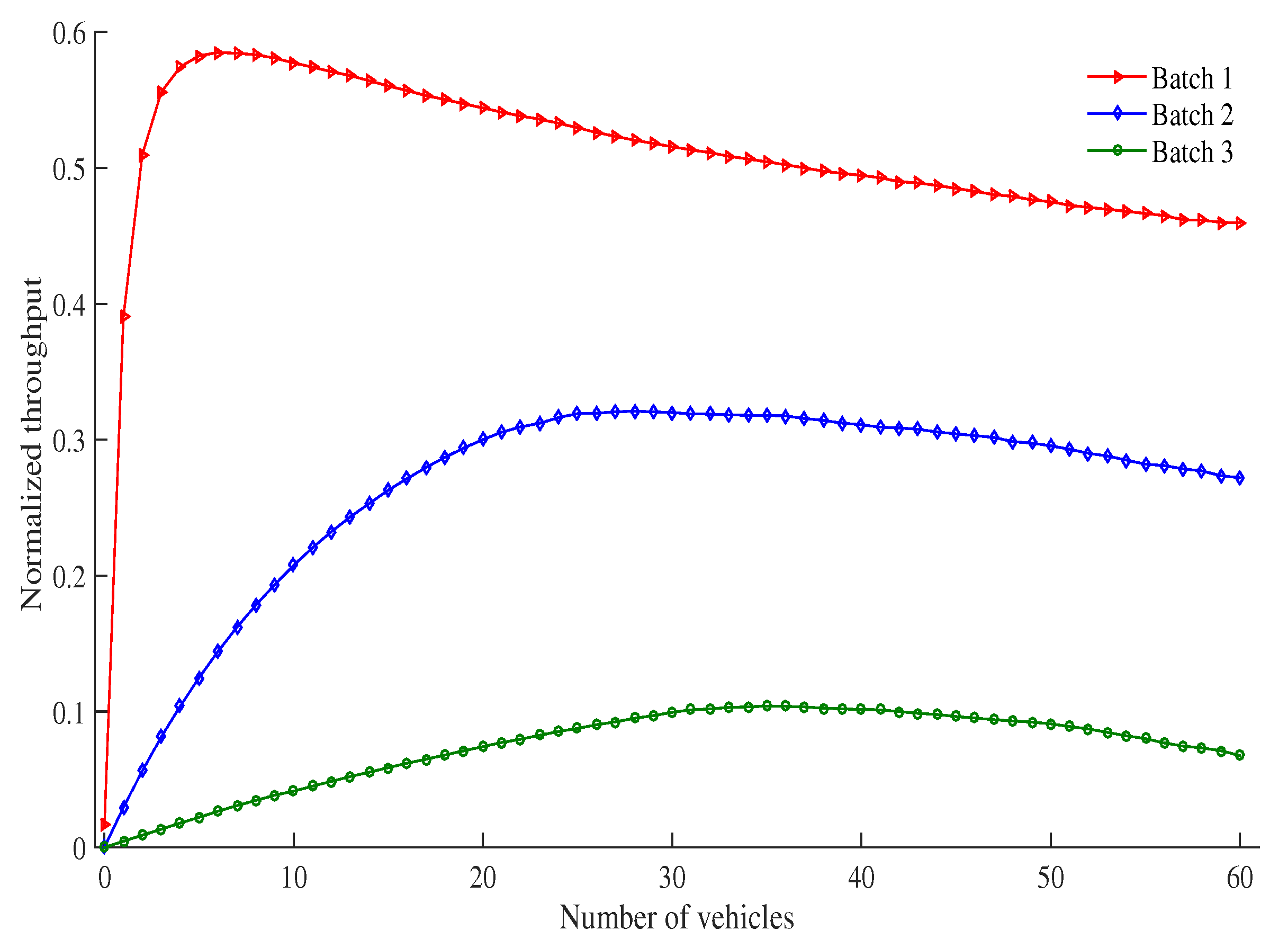
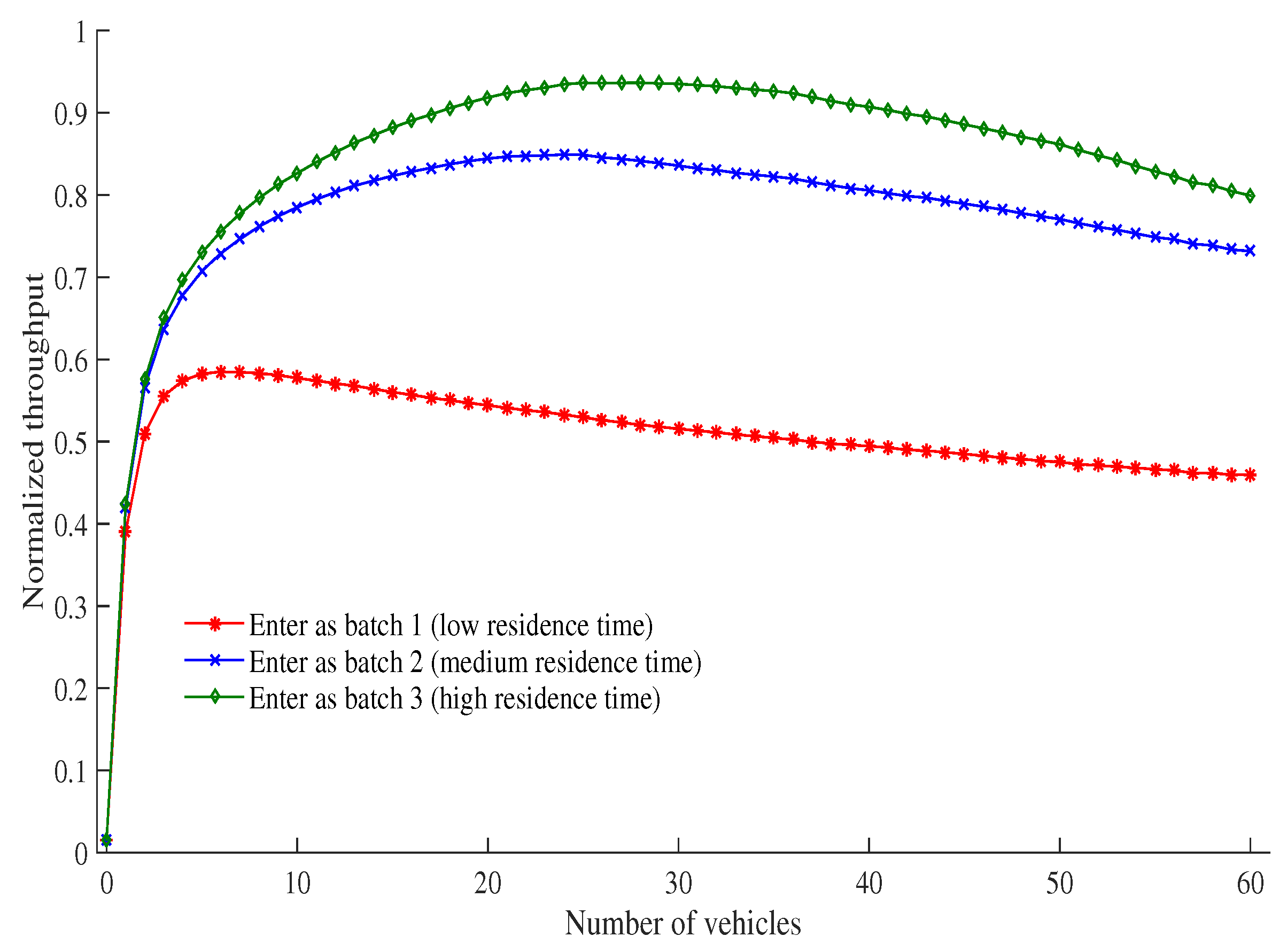
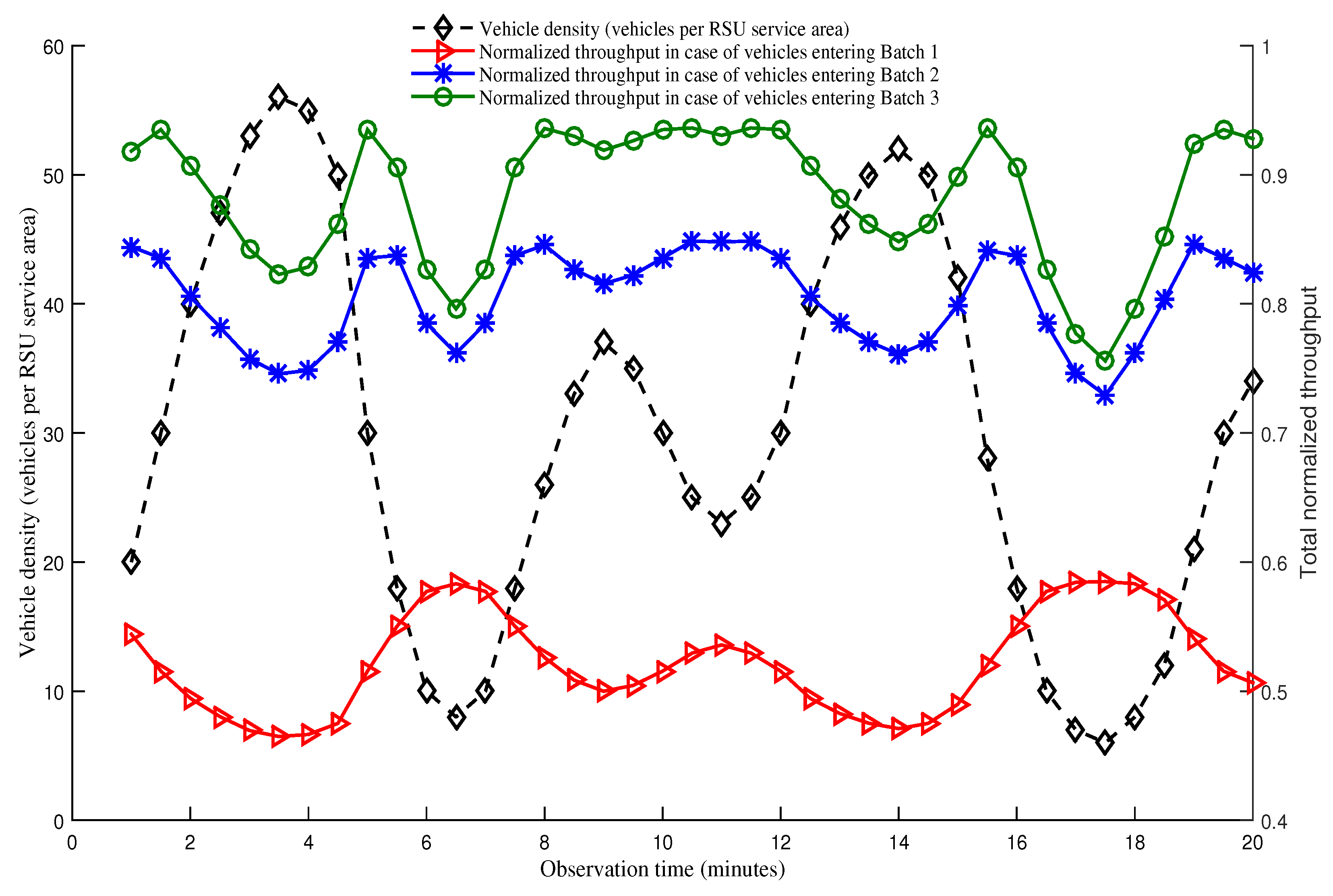
- We evaluate our proposed protocol in terms of collision probability, channel idle probability, successful probability, packet drop probability, transmission probability, normalized throughput, and total normalized throughput while considering a dense network that resembles an urban scenario. We also investigate the effect of vehicle density on the total normalized throughput.
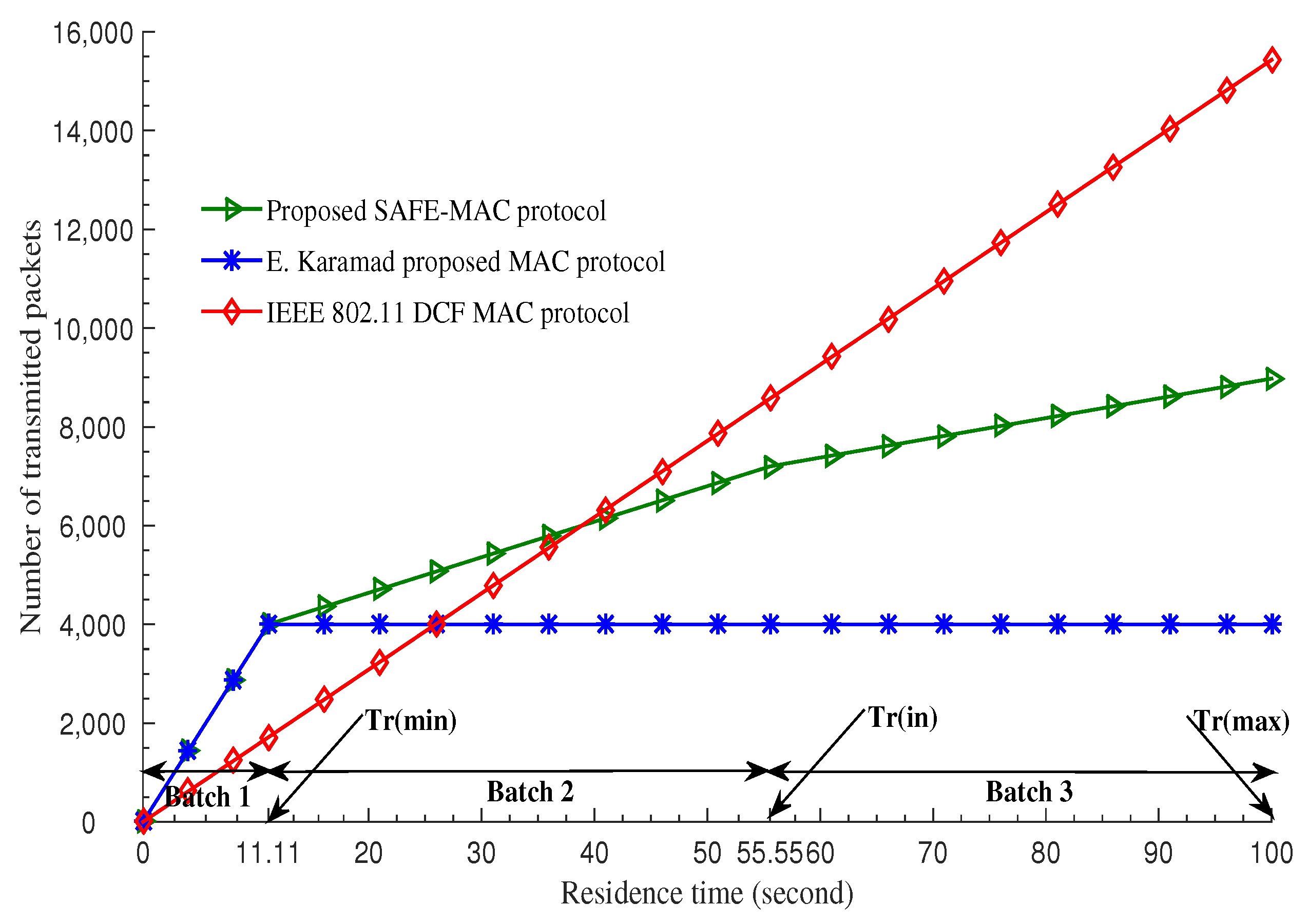
- Last but not least, we present a comprehensive view of the comparisons that describes the percentage of transmitted packets of different batches under different MAC protocols including the proposed SAFE-MAC protocol.
1.2. Organization of the Paper
2. Background
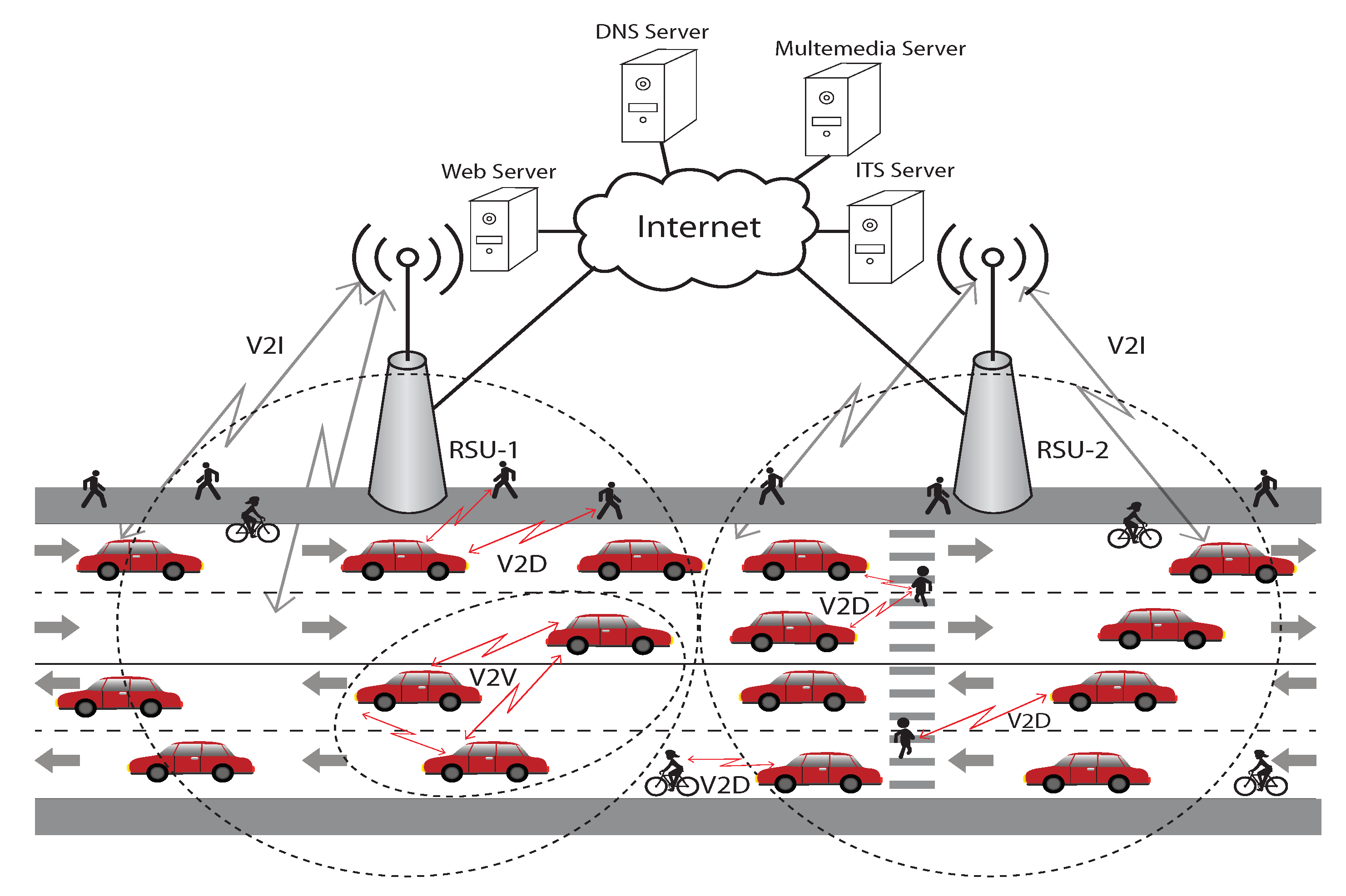
2.1. VANET System Architecture and Components
2.2. Fairness in Resource Allocation
2.3. Problem Statement
3. Previous Works
- Every node of the network always has at least one packet to transmit.
- There are no hidden or exposed terminals in the network, and there is no capture effect.
- Each packet collides with constant probability that is independent of the node state and other packets.
- Transmission channel is ideal and transmission errors occur due to packet collision only.
- Vehicles arrive in the service area of an RSU in batches with respect to Poisson process with constant arrival rate.
- The vehicles in each batch have the same average velocity which stays the same throughout the entire duration of the residence time of a particular RSU.
- Vehicles do not change direction, and batch numbers stay fixed for each vehicle during the entire residence time.
4. Proposed Speed Aware Fairness Enabled MAC (SAFE-MAC) Protocol
4.1. System Model and Assumptions
- Vehicles will arrive in an RSU service area according to a Poisson process and there will be no transmission error due to defective channels.
- Vehicle to RSU links are symmetric and the effects of hidden terminals, exposed terminals, and channel capture are ignored.
- Vehicles are able to measure their own positions, moving directions, and speeds.
- Two non-overlapping channels are used by neighboring RSUs, and these channels will not interfere with each other.
- Vehicles are equipped with IEEE 802.11 enabled communication devices.
- All vehicles and RSUs have some unique identification number.
- Within the service area of an RSU, the RSU and the vehicles operate at the same frequency.
- Errors may occur because of packet collisions. We define a packet collision to be the case when two packets arrive at the same vehicle or RSU at the same time.
4.2. Proposed SAFE-MAC Protocol
- At first, every vehicle will enter into the service area of a particular RSU and associate with that RSU.
- Vehicles will compute their moving direction, speed, and position within the network using a GPS receiver on their OBUs. Vehicles will then compute their residence time using Algorithm 1. Based on their residence time, vehicles will be associated as a member of Batch i. The detailed procedure of batch selection and batch update are given in Algorithm 2.
- Every vehicle will listen to the channel to determine if it is idle. In the case that the time the channel sits idle reaches the DIFS time for a particular vehicle, that vehicle will enter the backoff procedure and execute steps from 5.
- If the channel is perceived to be busy, the vehicle will do nothing and continue to listen to the channel for idleness. In the case that the time that the channel has been idle reaches the DIFS time for a particular vehicle, that vehicle will execute steps from 5.
- Every vehicle will check the queue. If the vehicle has at least one packet in the queue, the backoff instant will enter the backoff procedure. If the vehicle has no packets to transmit, the backoff instant will enter into the post-backoff procedure.
- In the post-backoff procedure, the backoff instant of the vehicles will start a backoff counter with an initial value randomly selected from , where . After this, the vehicle will execute the steps from 8.
- In the backoff procedure, the backoff instant of the vehicle will start a backoff counter with an initial value randomly selected from , where . After this, the vehicle will execute the steps from 10.
- During the post-backoff procedure, if the channel is perceived to be busy and the queue becomes empty, the backoff counter will stop at its current value. When the channel has become idle and stayed that way for DIFS time, the backoff counter will resume. If the channel is perceived to be idle in a time slot () and the queue becomes empty, the backoff counter will be decremented by one. When the backoff counter reaches zero, the queue will wait to receive a packet, and wait a predefined time interval. After this, the vehicles will execute from 2.
- During the post-backoff procedure, if the channel is perceived to be busy and the queue has at least one packet to transmit, the backoff instance moves to the backoff procedure without changing the backoff counter. If the channel is perceived to be idle and the queue has at least one packet to transmit, the backoff instant moves to the backoff procedure and the backoff counter will be decremented by one. After that, the vehicle continues to the next steps.
- During the backoff procedure, if the channel is perceived to be busy, the backoff counter will stop at its current value and the vehicle will continue to listen on the channel until the channel has been idle for up to the DIFS time. After this, the backoff counter will resume. Then If the channel is perceived to be idle in a time slot (), the backoff counter will be decremented by one. When the backoff counter reaches 0, the packet will be transmitted.
- If the transmission is successful, the vehicle executes the steps from 2.
- If the vehicle is not successful in sending its packet, the packet will be retransmitted. At the end of the retransmission, the backoff instant of the vehicle will start a new backoff counter, setting its value randomly from , where and j is the number of retransmission. After this, the vehicle executes the steps from 2.
- If the value of reaches , the backoff instant keeps the contention window size . Then the vehicle will try to retransmit up to the retransmission limit () without changing the contention window size using step 10. After the () times unsuccessful transmissions, the packet will be dropped and the vehicle will execute steps from 2.
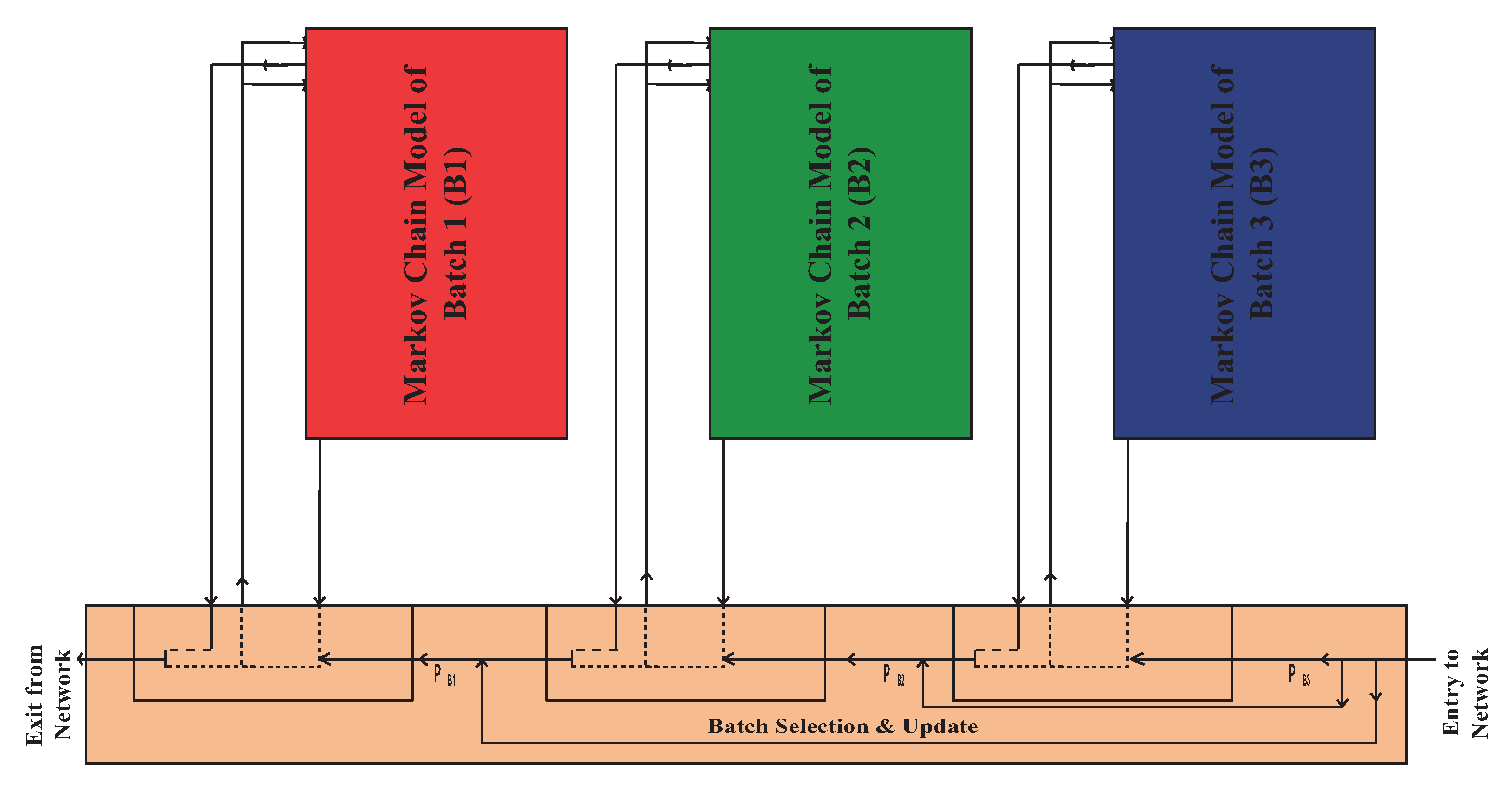
- When the residence time of the vehicle becomes zero, the vehicle will exit from the service area of the RSU and continue the above procedure under the next RSU. The channel access mechanism with batch update procedure is shown in Figure 3.
| Algorithm 1 Residence time calculation |
|
| Algorithm 2 Batch selection and update |
|
5. Modeling of the Proposed SAFE-MAC Protocol
5.1. Batch Selection
5.2. Markov Chain Analysis
5.3. Normalized Throughput Analysis
6. Analytical Results
7. Conclusions & Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Atallah, R.; Khabbaz, M.; Assi, C. Throughout analysis of IEEE 802.11p-based multi-hop V2I communications. In Proceedings of the IEEE International Symposium on a World of Wireless, Mobile and Multimedia Networks, Boston, MA, USA, 14–17 June 2015; pp. 1–6. [Google Scholar]
- Cavalcanti, E.R.; de Souza, J.A.R.; Spohn, M.A.; de Morais Gomes, R.C.; da Costa, A.F.B.F. VANETs’ research over the past decade: Overview, credibility, and trends. ACM SIGCOMM Comput. Commun. Rev. 2018, 48, 31–39. [Google Scholar] [CrossRef]
- Karamad, E.; Ashtiani, F. A modified 802.11-based MAC Scheme to Assure Fair Access for Vehicle to Roadside Communications. Comput. Commun. 2008, 31, 2898–2906. [Google Scholar] [CrossRef]
- Ren, M.; Khoukhi, L.; Labiod, H.; Zhang, J.; Vèque, V. A mobility-based scheme for dynamic clustering in vehicular ad-hoc networks (VANETs). Veh. Commun. 2017, 9, 233–241. [Google Scholar] [CrossRef]
- Zheng, L.; Wu, Y.; Xu, Z.; Lin, X. A Novel MAC Protocol for VANET based on Improved Generalized Prime Sequence. In Proceedings of the 2014 IEEE 7th International Conference on Advanced Infocomm Technology, IEEE/ICAIT 2014, Fuzhou, China, 14–16 November 2014; pp. 1–7. [Google Scholar]
- Atallah, R.; Khabbaz, M.; Assi, C. Modelling of Multi-hop Inter-vehicular Path formation for Connecting far Vehicles to RSUs. In Proceedings of the Wireless Communications and Networking Conference (WCNC), New Orleans, LA, USA, 9–12 March 2015; pp. 1954–1959. [Google Scholar]
- Bariah, L.; Shehada, D.; Salahat, E.; Yeun, C.Y. Recent Advances in VANET Security: A Survey. In Proceedings of the Vehicular Technology Conference (VTC Fall), Honolulu, HI, USA, 22–25 September 2019; pp. 1–7. [Google Scholar]
- Atallah, R.; Khabbaz, M.; Assi, C. Multihop V2I Communications: A Feasibility Study, Modeling, and Performance Analysis. IEEE Trans. Veh. Technol. 2017, 66, 2801–2810. [Google Scholar] [CrossRef]
- Dharsandiya, A.N.; Patel, R.M. A review on MAC Protocols of Vehicular Ad Hoc Networks. In Proceedings of the Wireless Communications, Signal Processing and Networking (WiSPNET), Chennai, India, 23–25 March 2016; pp. 1040–1045. [Google Scholar]
- Gupta, N.; Prakash, A.; Tripathi, R. Medium Access Control Protocols for Safety Applications in Vehicular Ad Hoc Network: A Classification and Comprehensive Survey. Veh. Commun. 2015, 2, 223–237. [Google Scholar] [CrossRef]
- Jiang, X.; Du, D.H. PTMAC: A Prediction-Based TDMA MAC Protocol for Reducing Packet Collisions in VANET. IEEE Trans. Veh. Technol. 2016, 65, 9209–9223. [Google Scholar] [CrossRef]
- Balador, A.; Böhm, A.; Calafate, C.T.; Cano, J.C. A Reliable Token-based MAC Protocol for V2V Communication in Urban VANET. In Proceedings of the the 2016 IEEE 27th International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Valencia, Spain, 4–7 Sepember 2016; pp. 1–6. [Google Scholar]
- Yu, B.; Xu, C. Vehicular Ad hoc Networks: An Information-centric Perspective. ZTE Commun. 2010, 8, 42–49. [Google Scholar]
- Sam, D.; Velanganni, C.; Evangelin, T.E. A vehicle control system using a time synchronized Hybrid VANET to reduce road accidents caused by human error. Veh. Commun. 2016, 6, 17–28. [Google Scholar] [CrossRef]
- Kushner, H.J.; Whiting, P.A. Convergence of proportional-fair sharing algorithms under general conditions. IEEE Trans. Wirel. Commun. 2004, 3, 1250–1259. [Google Scholar] [CrossRef]
- Miao, G.; Zander, J.; Sung, K.W.; Slimane, S.B. Fundamentals of Mobile Data Networks; Cambridge University Press, University Printing House: Cambridge, UK, 2016. [Google Scholar]
- IEEE 802.11p Working Group. IEEE Standard for Information Technology-Local and Metropolitan Area Networks-Specific Requirements-part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications Amendment 6: Wireless Access in Vehicular Environments. In IEEE Std; IEEE: Piscataway, NJ, USA, 2010; 11p. [Google Scholar]
- Karamad, E.; Ashtiani, F. Performance analysis of IEEE 802.11 DCF and 802.11e EDCA based on queueing networks. IET Commun. 2009, 3, 871–881. [Google Scholar] [CrossRef]
- Nguyen, V.; Pham, C.; Oo, T.Z.; Tran, N.H.; Huh, E.N.; Hong, C.S. MAC protocols with dynamic interval schemes for VANETs. Veh. Commun. 2019, 15, 40–62. [Google Scholar] [CrossRef]
- IEEE 802.11 Working Group. IEEE Standard for Information Technology-Telecommunications and Information Exchange between Systems-Local and Metropolitan Area Networks-Specific Requirements Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications. In IEEE Std; IEEE: Piscataway, NJ, USA, 2002; Volume 802. [Google Scholar]
- Siddik, M.A.; Moni, S.S.; Alam, M.S. An efficient MAC protocol for provisioning fairness in vehicle to roadside communications. In Proceedings of the 2016 9th International Conference on Electrical and Computer Engineering (ICECE), Dhaka, Bangladesh, 20–22 December 2016; pp. 475–478. [Google Scholar]
- Shi, H.; Prasad, R.V.; Onur, E.; Niemegeers, I. Fairness in Wireless Networks: Issues, Measures and Challenges. IEEE Commun. Surv. Tutor. 2014, 16, 5–24. [Google Scholar]
- Jain, R.; Chiu, D.M.; Hawe, W.R. A Quantitative Measure of Fairness and Discrimination for Resource Allocation in Shared Computer System; Eastern Research Laboratory, Digital Equipment Corporation: Hudson, MA, USA, 1984; Volume 38. [Google Scholar]
- Shannon, C.E. The Mathematical Theory of Communication. Bell Syst. Tech. J. 1948, 27, 379–423. [Google Scholar] [CrossRef]
- Radunović, B.; Boudec, J.Y.L. A Unified Framework for Max-min and Min-max Fairness with Applications. IEEE/ACM Trans. Netw. 2007, 15, 1073–1083. [Google Scholar] [CrossRef]
- Wu, Q.; Zheng, J. Performance modeling and analysis of IEEE 802.11 DCF based fair channel access for vehicle-to-roadside communication in a non-saturated state. Wirel. Netw. 2015, 21, 1–11. [Google Scholar] [CrossRef]
- Harigovindan, V.P.; Babu, A.V.; Jacob, L. Ensuring Fair Access in IEEE 802.11p-Based Vehicle to Infrastructure Networks. EURASIP J. Wirel. Commun. Netw. 2012, 2012, 168–185. [Google Scholar] [CrossRef]
- Hoeft, M.; Rak, J. How to Provide fair Service for V2I Communications in VANETs? Ad Hoc Netw. 2016, 37, 283–294. [Google Scholar] [CrossRef]
- Zhang, L.; Liu, Y.; Wang, Z.; Guo, J.; Huo, Y. Mobility and QoS Oriented 802.11p MAC Scheme for Vehicle to Infrastructure Communications. Telecommun. Syst. 2015, 60, 107–117. [Google Scholar] [CrossRef]
- Hussain, S.A.; Iqbal, M.; Saeed, A.; Raza, I.; Raza, H.; Ali, A.; Bashir, A.K.; Baig, A. An efficient channel access scheme for vehicular ad hoc networks. Mob. Inf. Syst. 2017, 2017, 1–10. [Google Scholar] [CrossRef]
- Wu, Q.; Xia, S.; Fan, P.; Fan, Q.; Li, Z. Velocity-Adaptive V2I Fair-Access Scheme Based on IEEE 802.11 DCF for Platooning Vehicles. Sensors 2018, 18, 4198. [Google Scholar] [CrossRef]
- Alasmary, W.; Zhuang, W. Mobility Impact in IEEE 802.11p Infrastructureless Vehicular Networks. Ad Hoc Netw. 2012, 10, 222–230. [Google Scholar] [CrossRef]
- Bianchi, G. Performance Analysis of the IEEE 802.11 Distributed Coordination Function. IEEE J. Sel. Areas Commun. 2000, 18, 535–547. [Google Scholar] [CrossRef]
- Zhao, H.; Garcia-Palacios, E.; Wang, S.; Wei, J.; Ma, D. Evaluating the impact of network density, hidden nodes and capture effect for throughput guarantee in multi-hop wireless networks. Ad Hoc Netw. 2013, 11, 54–69. [Google Scholar] [CrossRef]
- Zhao, H.; Garcia-Palacios, E.; Song, A.; Wei, J. Calculating end-to-end throughput capacity in wireless networks with consideration of hidden nodes and multi-rate terminals. In Proceedings of the 2011 IEEE 73rd Vehicular Technology Conference (VTC Spring), Budapest, Hungary, 15–18 May 2011; pp. 1–5. [Google Scholar]
- Son, I.K.; Mao, S.; Hur, S.M. Medium access control for opportunistic concurrent transmissions under shadowing channels. Sensors 2009, 9, 4824–4844. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, V.; Kim, O.T.T.; Pham, C.; Oo, T.Z.; Tran, N.H.; Hong, C.S.; Huh, E.N. A survey on adaptive multi-channel MAC protocols in VANETs using Markov models. IEEE Access 2018, 6, 16493–16514. [Google Scholar] [CrossRef]
- Zheng, J.; Wu, Q. Performance Modeling and Analysis of the IEEE 802.11p EDCA Mechanism for VANET. IEEE Trans. Veh. Technol. 2016, 65, 2673–2687. [Google Scholar] [CrossRef]
- Liu, X.; Saadawi, T.N. IEEE 802.11e (EDCA) analysis in the presence of hidden stations. J. Adv. Res. 2011, 2, 219–225. [Google Scholar] [CrossRef] [Green Version]
- Engelstad, P.E.; Østerbø, O.N. Non-saturation and saturation analysis of IEEE 802.11e EDCA with starvation prediction. In Proceedings of the 8th ACM international symposium on Modeling, analysis and simulation of wireless and mobile systems, Montréal, QC, Canada, 10–13 October 2005; pp. 224–233. [Google Scholar]
- Bae, Y.H.; Kim, K.J.; Moon, M.N.; Choi, B.D. Analysis of IEEE 802.11 Non-saturated DCF by Matrix Analytic Methods. Ann. Oper. Res. 2008, 162, 3–18. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Instantaneous Residence Time () | Batch No () | Maximum Residence Time () | Priority (i) |
|---|---|---|---|
| 0 < ≤ | High | ||
| < ≤ | Medium | ||
| < ≤ | Low |
| Notation | Definition |
|---|---|
| Probability of a vehicle of Batch i | |
| is in backoff stage k with backoff counter value k | |
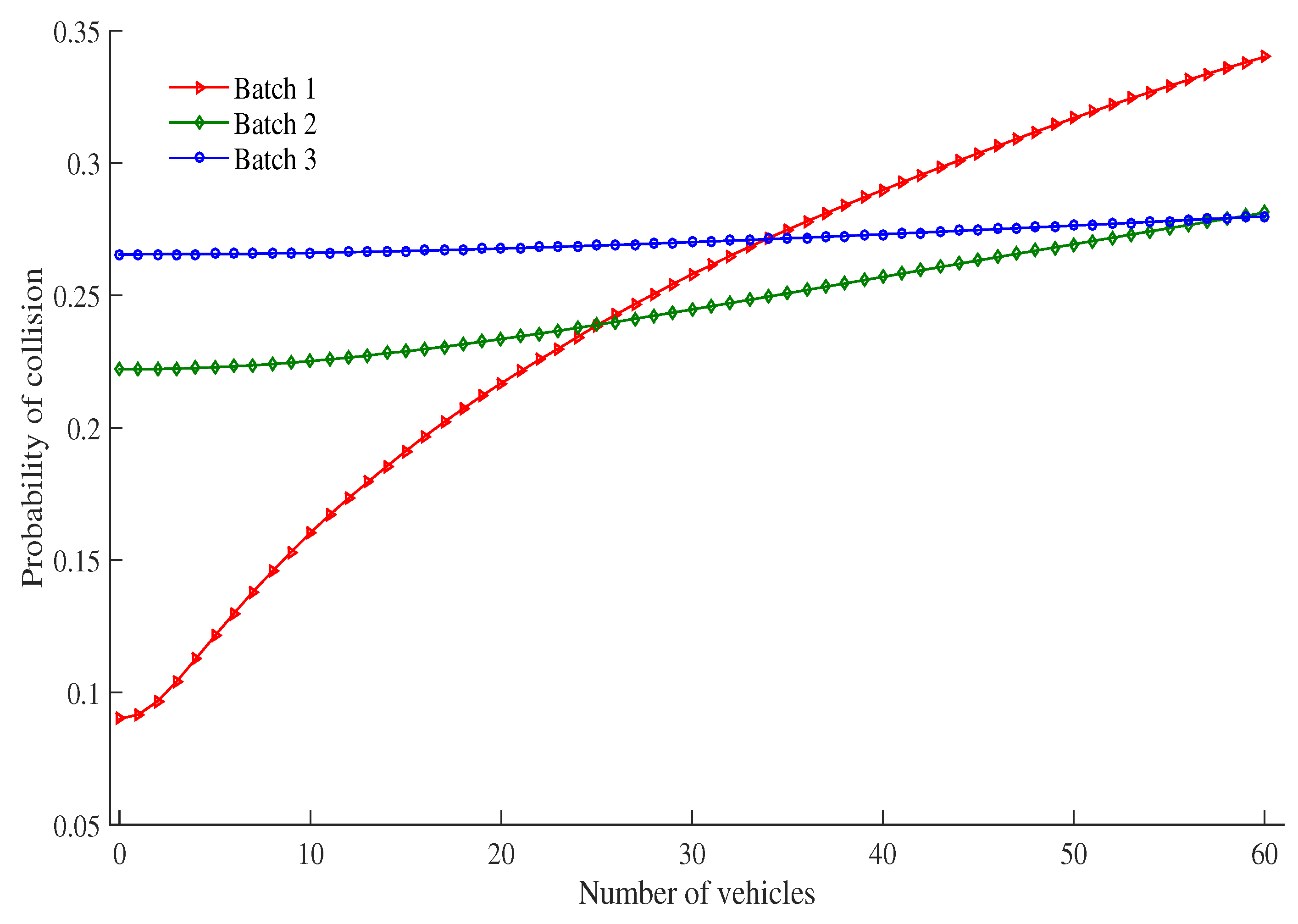
| Collision probability of Batch i | |
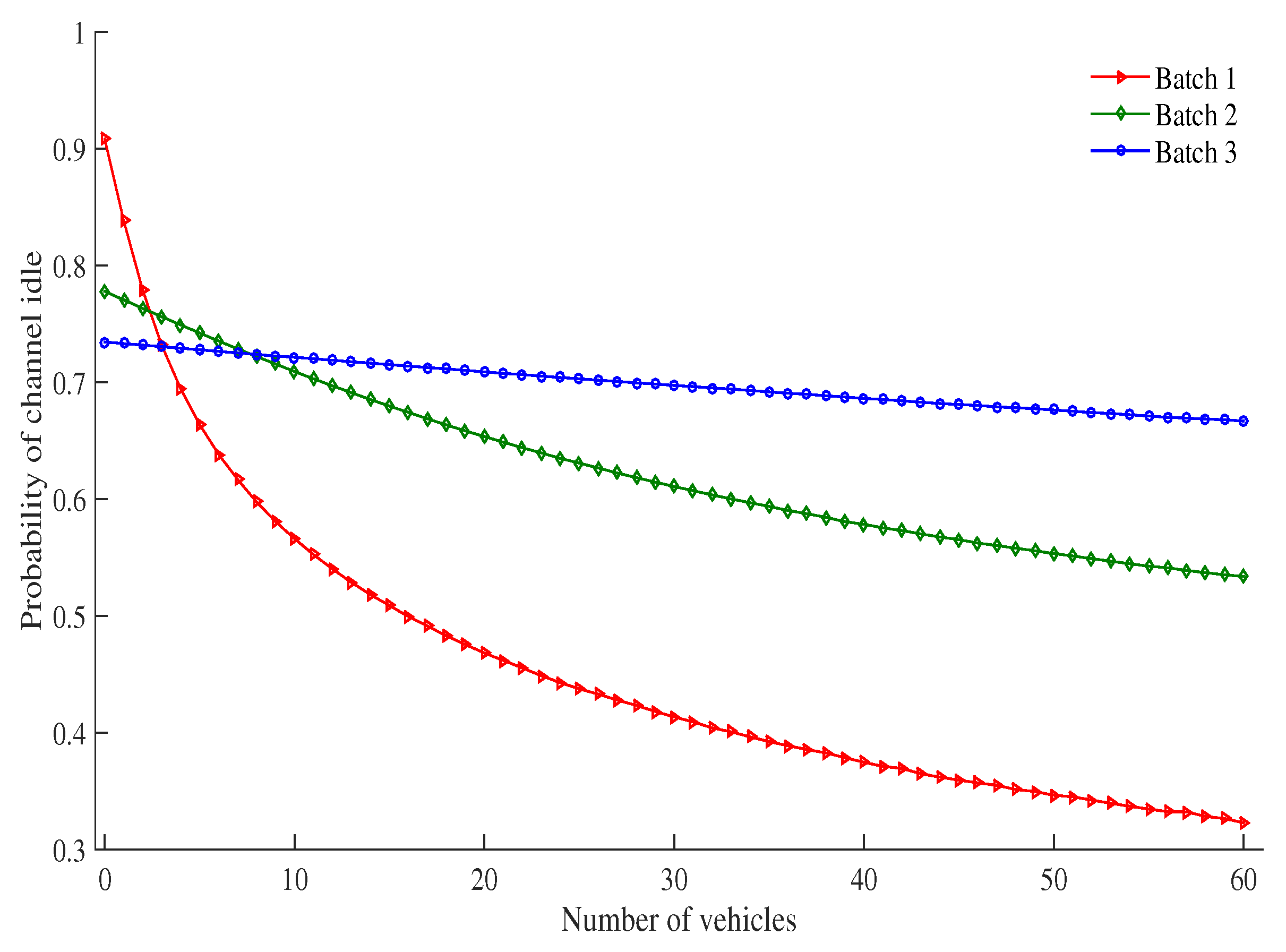
| Channel idle probability when Batch i has a packet to transmit | |
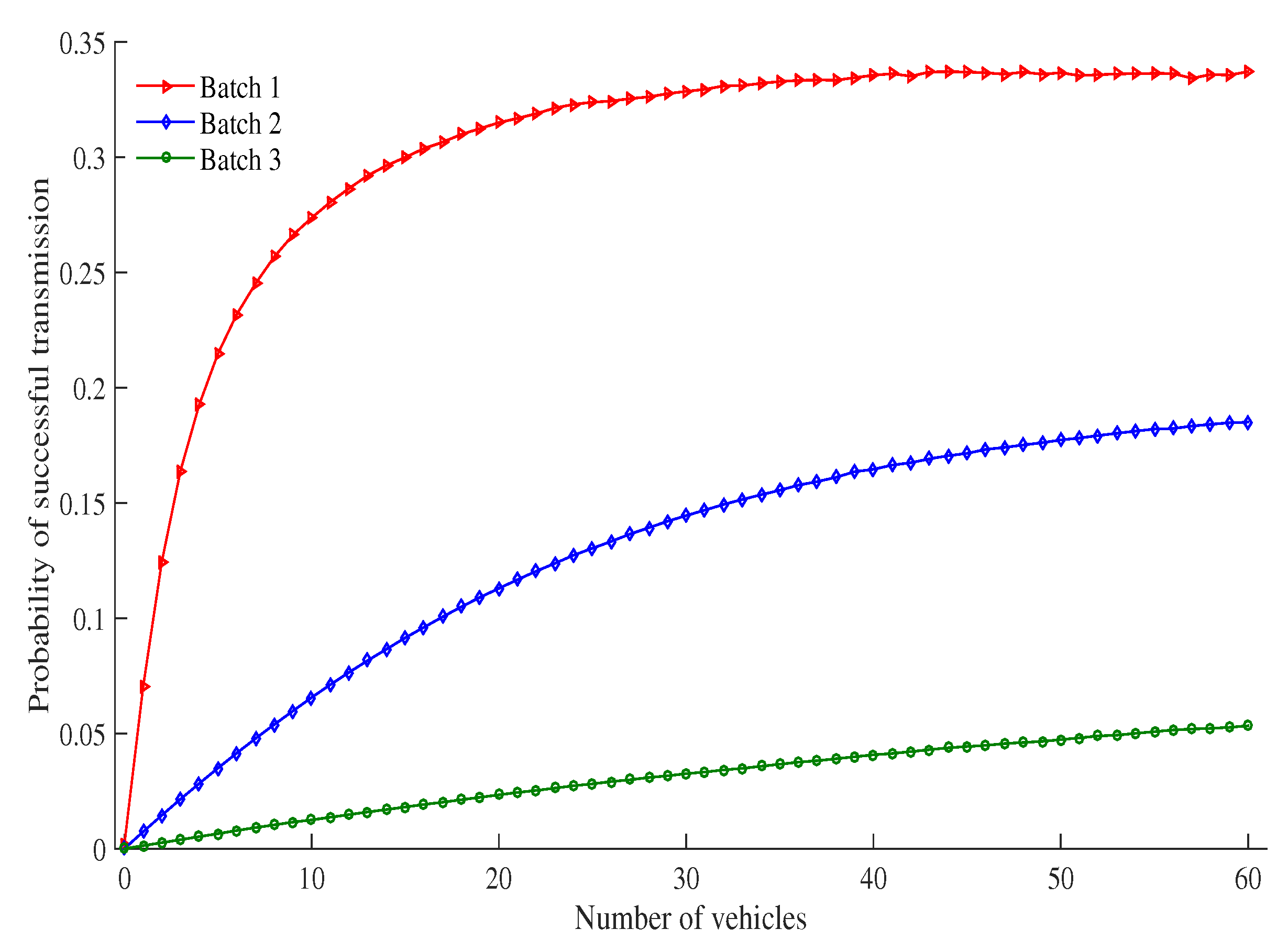
| Probability of successful transmission of Batch i | |
| Packet drop probability of Batch i | |
| Probability that an vehicle of Batch i has empty queue after | |
| successful transmission or packet drop | |
| Probability that an vehicle of Batch i has empty queue | |
| Contention window size of Batch i at backoff stage j | |
| Minimum contention window size of Batch i | |
| Maximum contention window size of Batch i | |
| Maximum stage of Batch i beyond which the | |
| contention window will not be increased | |
| Retransmission limit of Batch i | |
| Transmission probability of Batch i | |
| Average number of vehicle of Batch i | |
| Average time of a successful transmission | |
| Average time of a collision | |
| Duration of a empty CSMA slot | |
| Average packet length in time | |
| Average residence time of Batch i | |
| Normalized throughput of Batch i | |
| Packet transmission rate of Batch i |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 8184 | H | 0.8 | |
| 8972 | 1 | ||
| 8713 | 216 | ||
| 50 | 500 | ||
| 28 | 4000 | ||
| 128 | 45 | ||
| 240 | 5 |
| Parameters | Batch 1 (B1) | Batch 2 (B2) | Batch 3 (B3) |
|---|---|---|---|
| 3 | 9 | 30 | |
| 12 | 112 | 1280 | |
| 2 | 4 | 7 | |
| 4 | 2 | 0 |
| Instantaneous Residence Time () (Sec.) | Batch No () |
|---|---|
| 0 < ≤ 11.11 | |
| 11.11 < ≤ 55.55 | |
| 55.55 < ≤ 100 |

| Standard IEEE 802.11 DCF MAC | E. Karamad & F. Ashtiani Proposed Protocol | Proposed SAFE-MAC Protocol | |
|---|---|---|---|
| Speed varies between 5 and 35 |  |  |  |
| Speed varies between 5 and 45 |  |  |  |
| Speed varies between 5 and 65 |  |  |  |
| Speed varies between 5 and 85 |  |  |  |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Siddik, M.A.; Moni, S.S.; Alam, M.S.; Johnson, W.A. SAFE-MAC: Speed Aware Fairness Enabled MAC Protocol for Vehicular Ad-hoc Networks. Sensors 2019, 19, 2405. https://doi.org/10.3390/s19102405
Siddik MA, Moni SS, Alam MS, Johnson WA. SAFE-MAC: Speed Aware Fairness Enabled MAC Protocol for Vehicular Ad-hoc Networks. Sensors. 2019; 19(10):2405. https://doi.org/10.3390/s19102405
Chicago/Turabian StyleSiddik, Md. Abubakar, Shafika Showkat Moni, Mohammad Shah Alam, and William A. Johnson. 2019. "SAFE-MAC: Speed Aware Fairness Enabled MAC Protocol for Vehicular Ad-hoc Networks" Sensors 19, no. 10: 2405. https://doi.org/10.3390/s19102405
APA StyleSiddik, M. A., Moni, S. S., Alam, M. S., & Johnson, W. A. (2019). SAFE-MAC: Speed Aware Fairness Enabled MAC Protocol for Vehicular Ad-hoc Networks. Sensors, 19(10), 2405. https://doi.org/10.3390/s19102405