Research on Attitude Models and Antenna Phase Center Correction for Jason-3 Satellite Orbit Determination



Abstract
:1. Introduction
2. Model for Attitude, Antenna PCO/PCV and Its POD Strategies
2.1. Jason-3 Satellite Attitude
2.1.1. Jason-3 Attitude Model
2.1.2. Models of PCO Estimation and PCO Correction
2.2. Jason-3 Receiver PCVs
2.3. Jason-3 POD Models and Strategies
3. Experiments for Jason-3 Attitude Modes and Receiver PCVs Calibration
3.1. Effect of Jason-3 Attitude Modes on Receiver PCO and POD
3.1.1. Effect of Jason-3 Attitude Modes on PCO Estimation
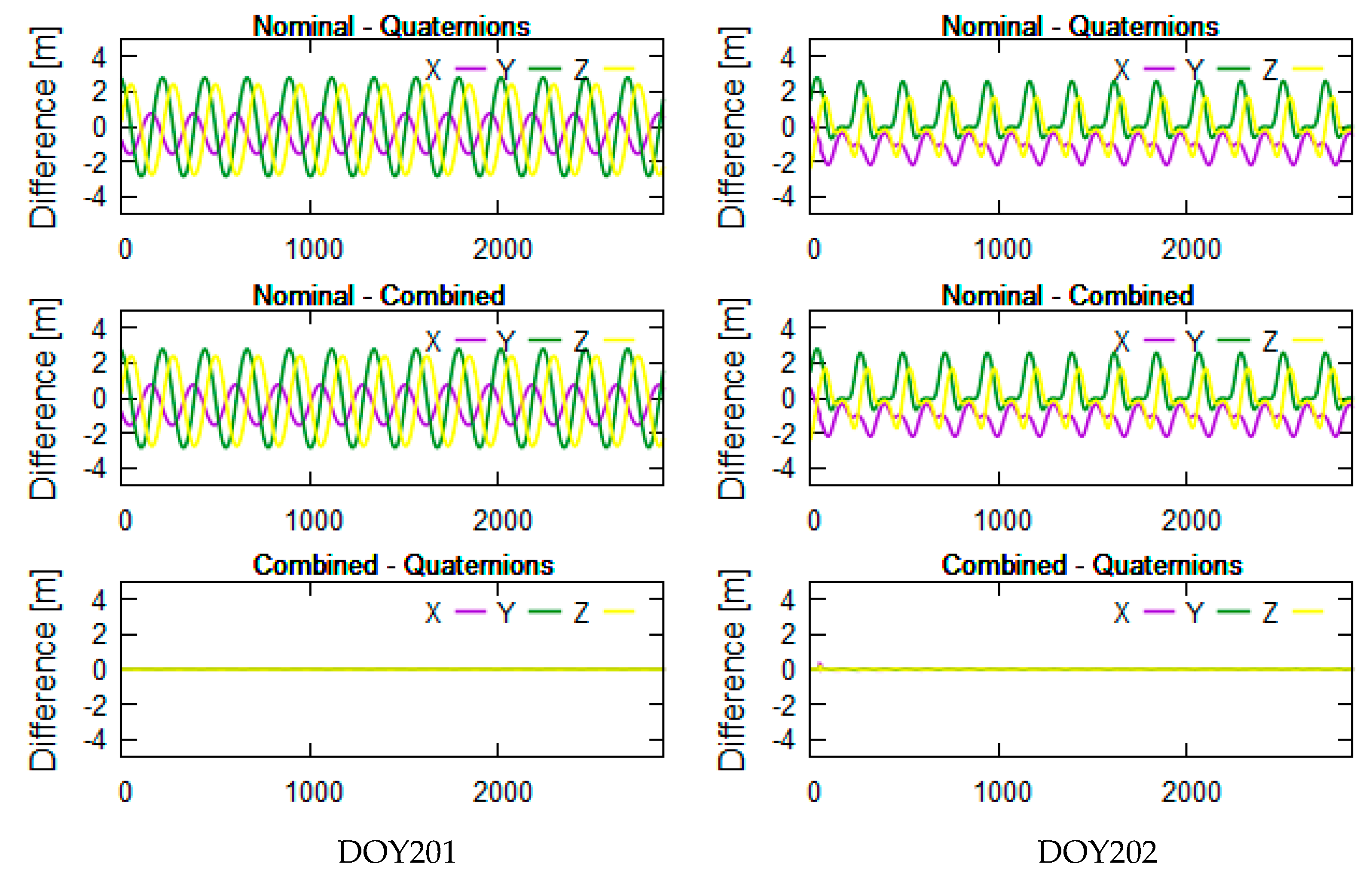
3.1.2. Effect of Different Attitude Modes on PCO Correction (Modeling Analysis of the Combined Attitude)
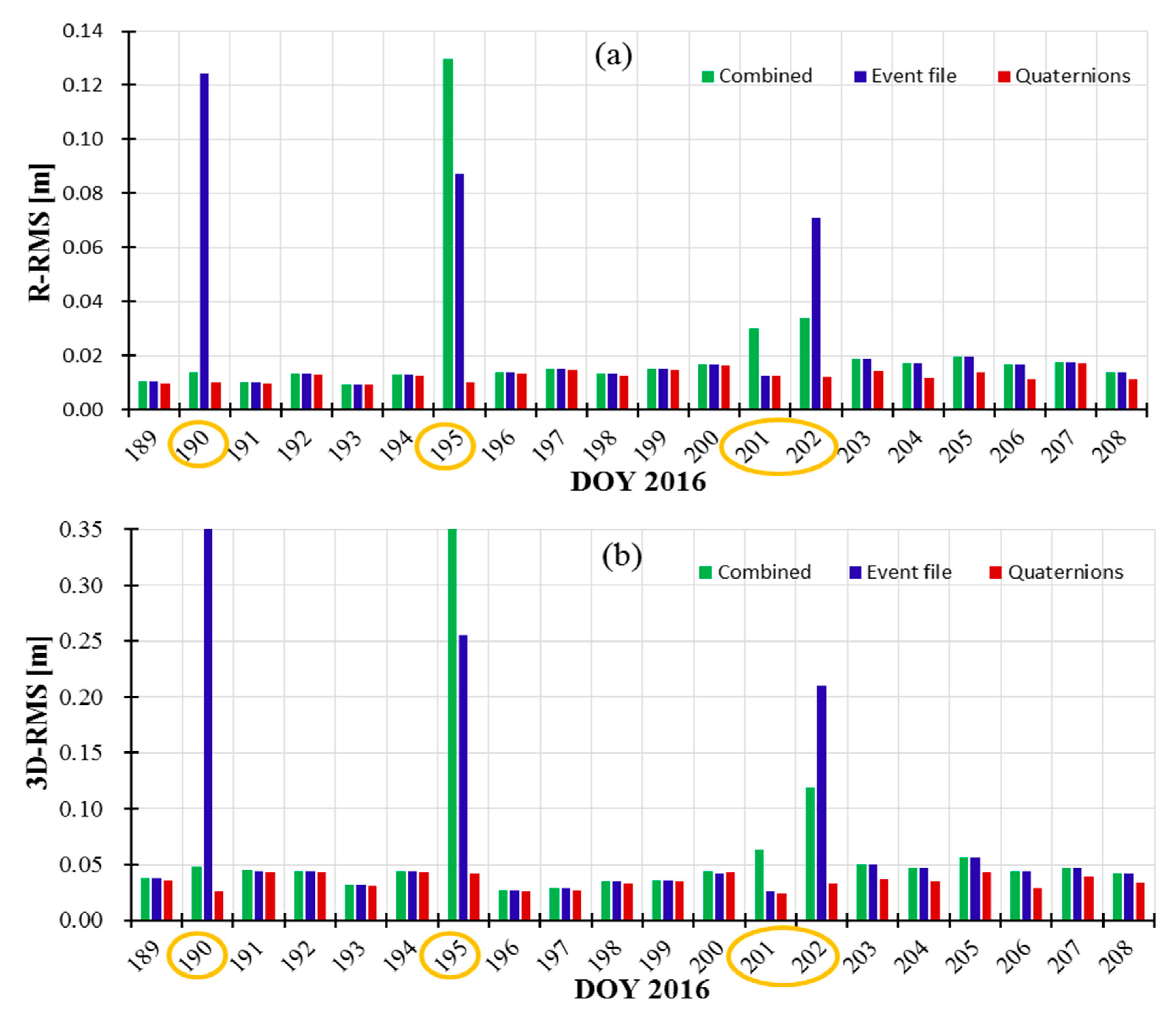
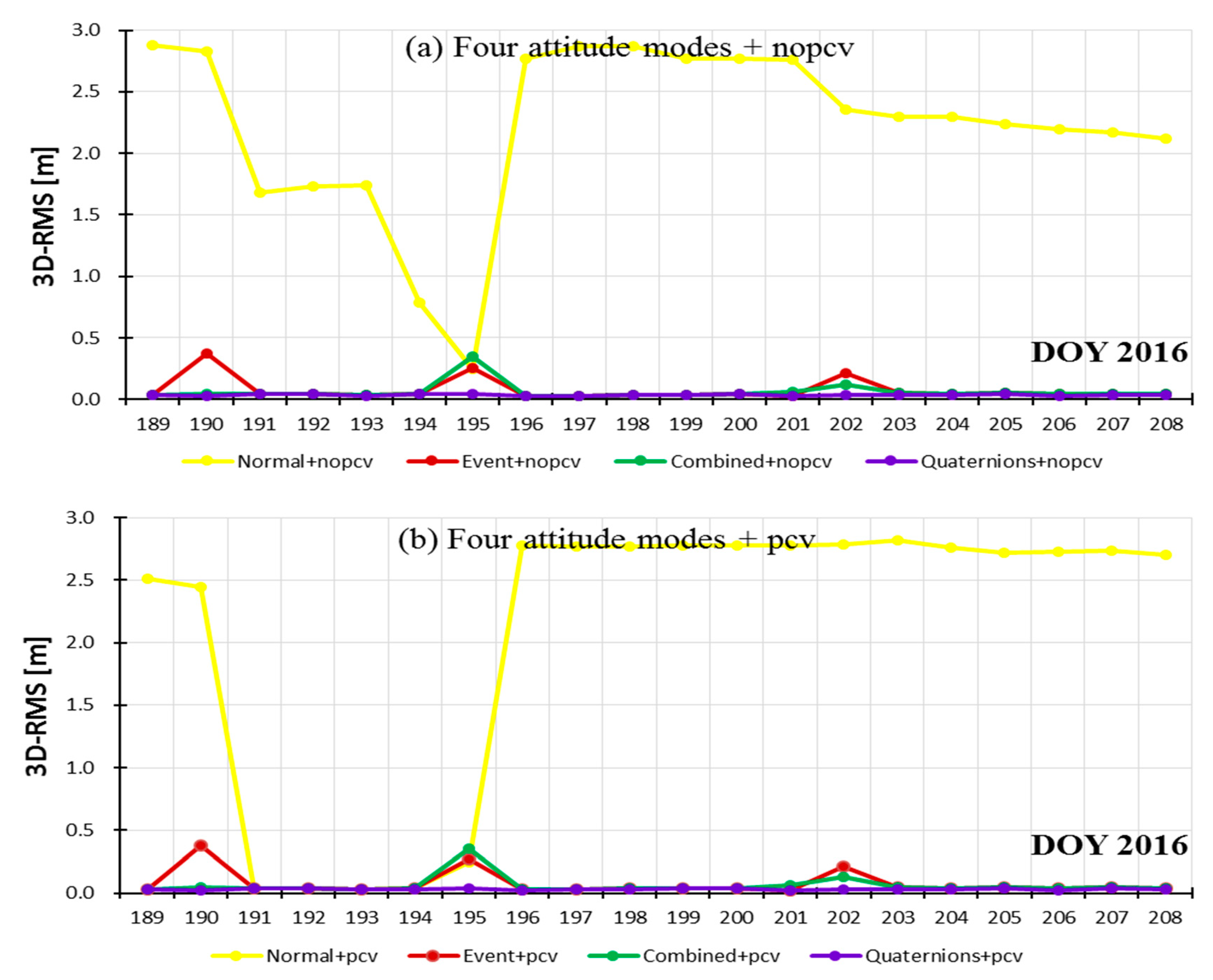
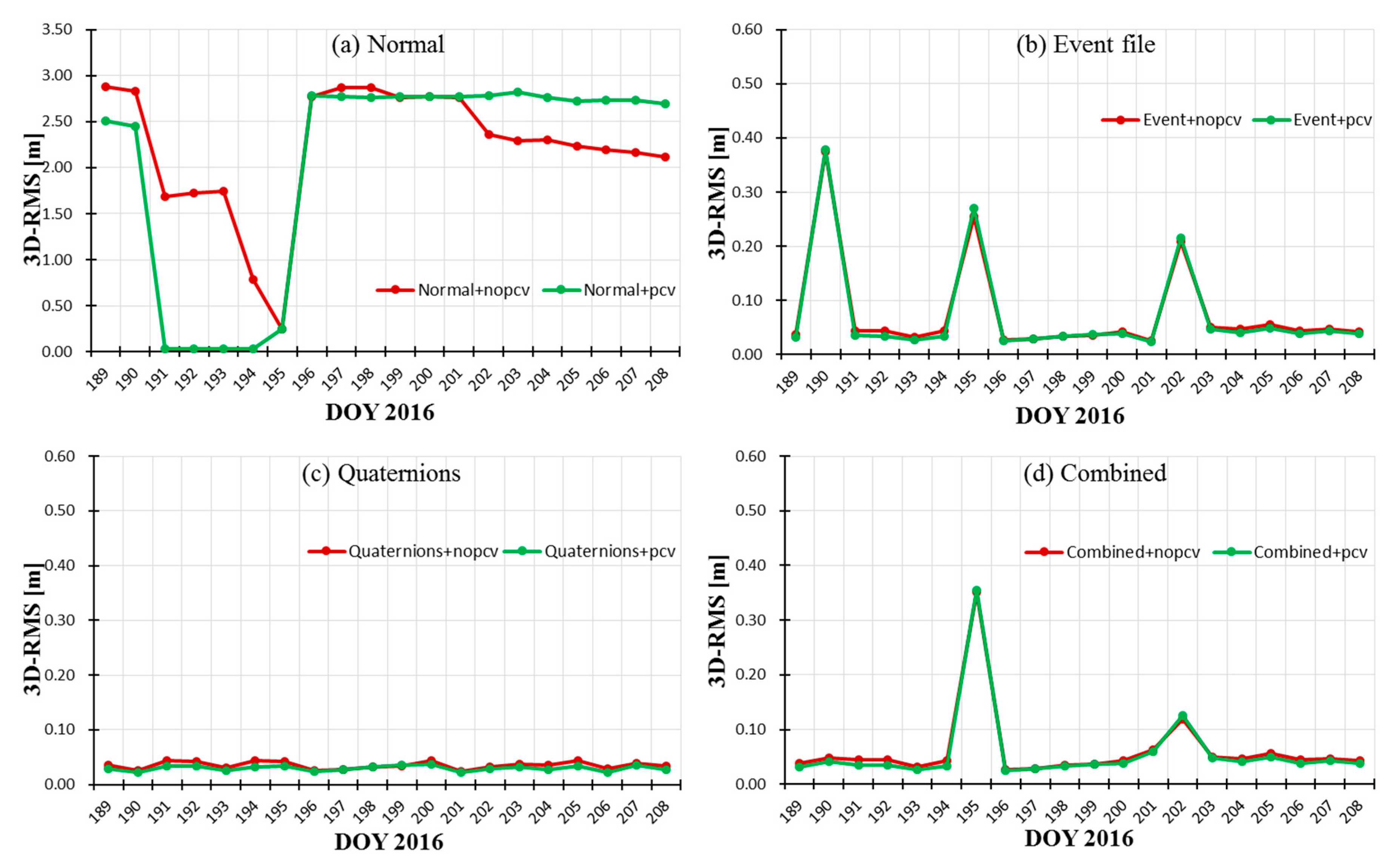
3.1.3. Orbital Accuracy Validation with Different Attitude Modes
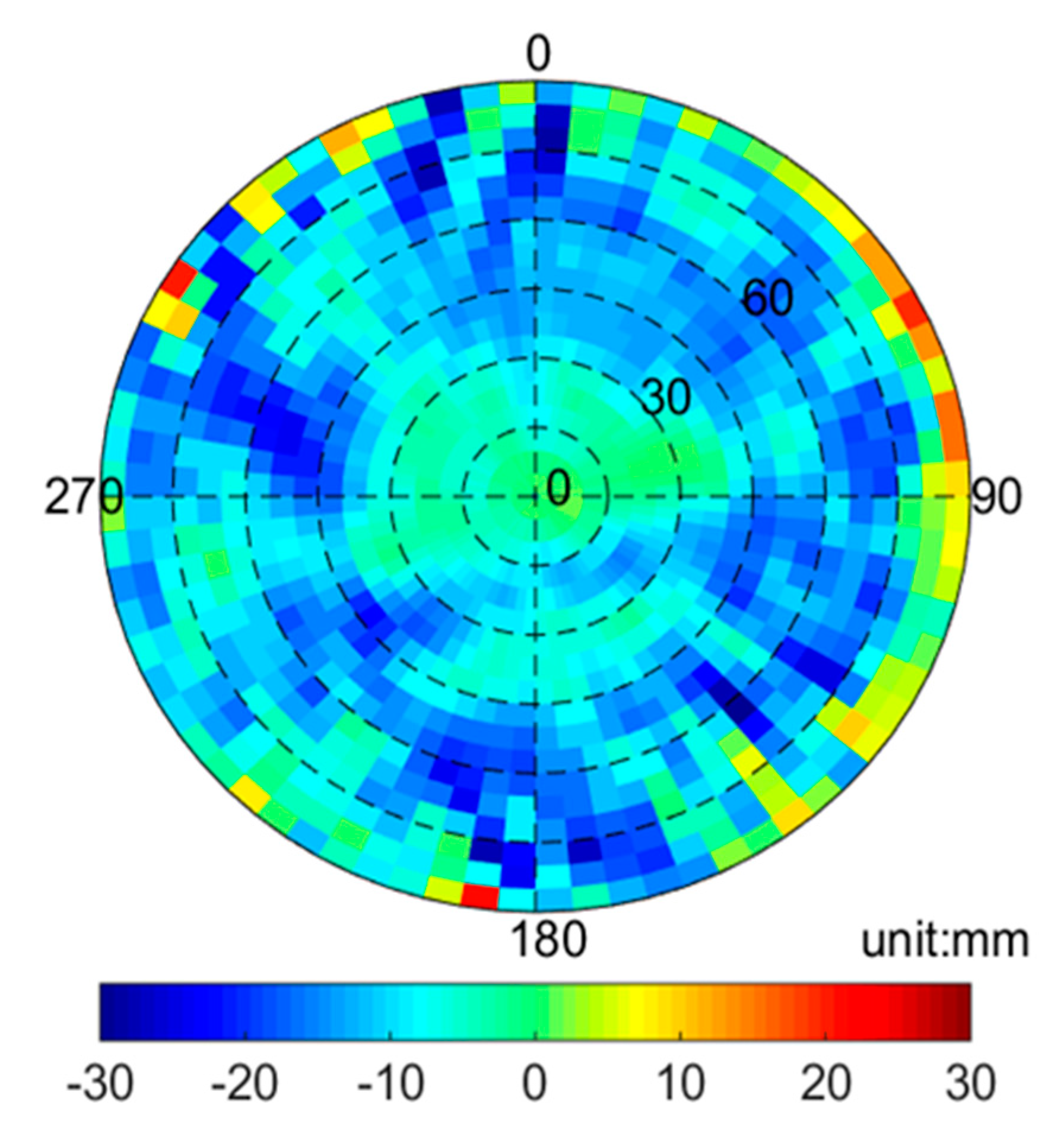
3.2. Experiments of Receiver PCV Correction
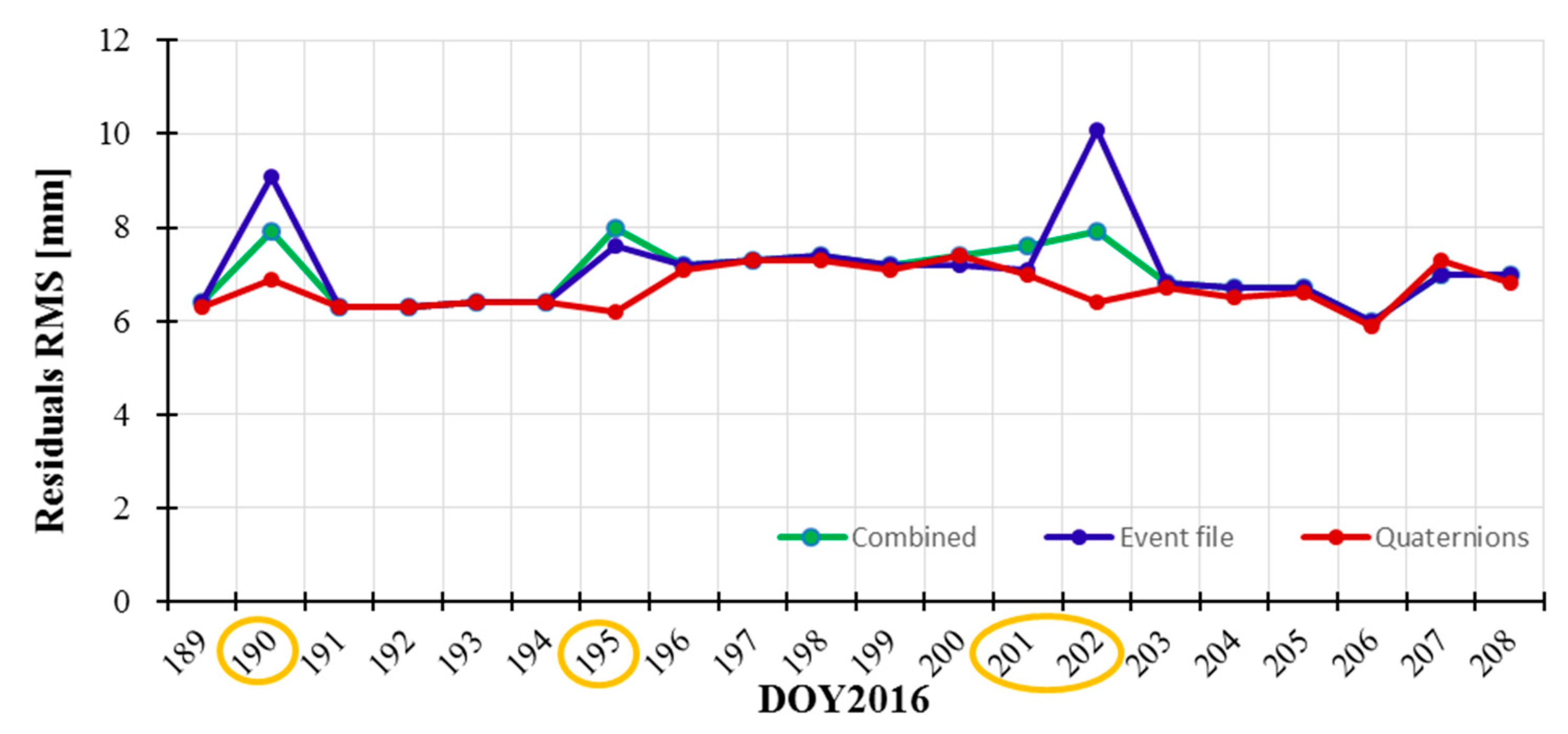
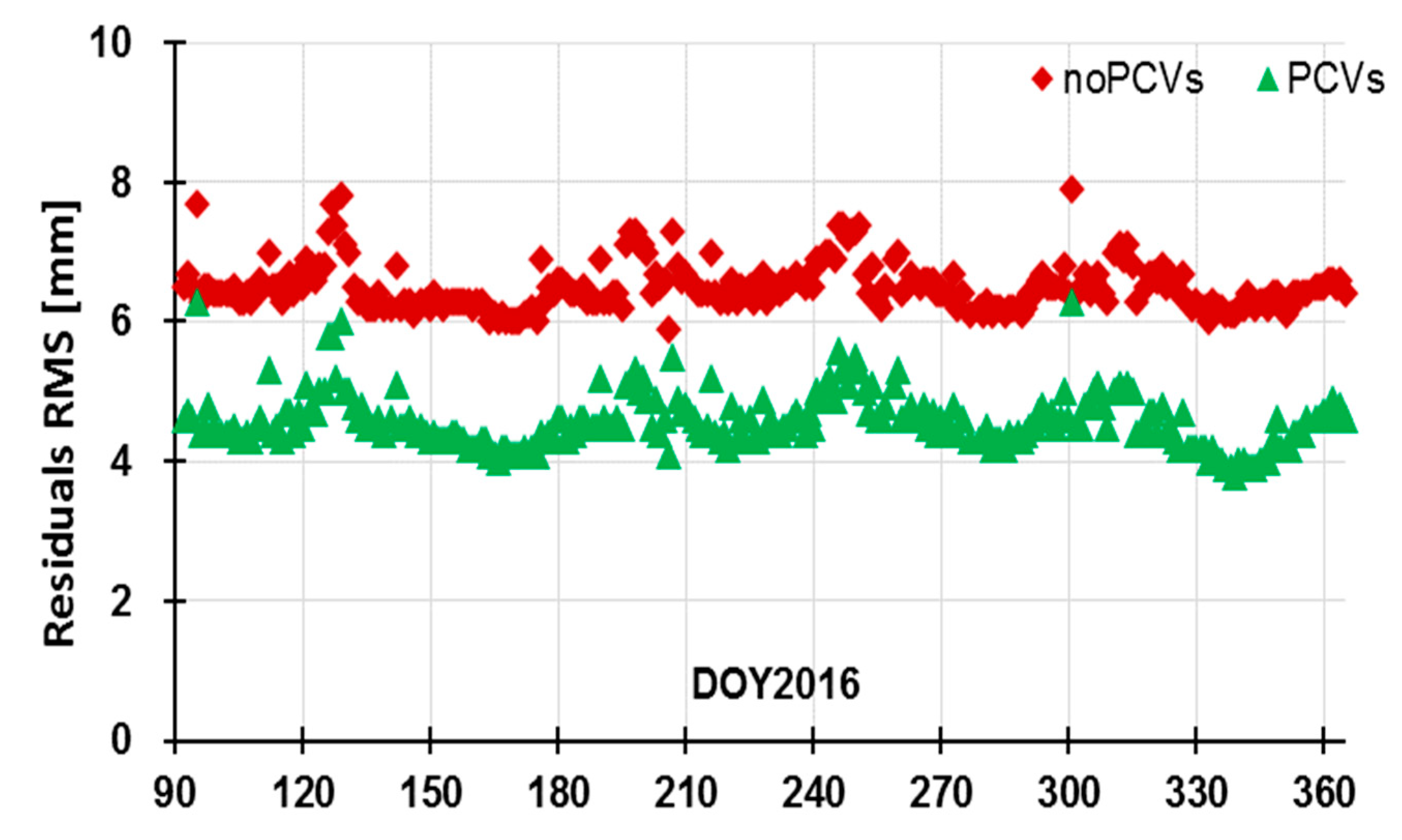
3.2.1. Residuals Comparison
3.2.2. External Orbits Validation
3.2.3. SLR Validation
4. Integrated Experiments
5. Conclusions
- (1)
- A combined attitude model based on experimental analysis was designed as the alternative or revision of event file for Jason-3 POD. To validate the feasibility of the combined attitude mode, we analyzed the effects of different attitude modes on PCO estimation, PCO correction and POD. The differences in PCO correction provided a method to define the transition threshold of combined attitude and a validation way for attitude modes. The PCO estimation with combined model are better than those with nominal attitude and slightly worse than those with quaternions. The POD results showed that the orbital accuracy with the combined attitude is slightly more stable than that of event file.
- (2)
- The receiver PCO was estimated in-orbit and the PCVs are modeled by residual approach for Jason-3 satellite. By introducing receiver PCVs map, the orbital accuracy can be improved by millimeter level, in which the mean residuals RMS reduced by 1.9 mm, the 3D-RMS position difference is improved by 5.7 mm, and accuracy of equivalent distance error by SLR validation is improved by 4.1 mm.
- (3)
- The eight schemes were designed to integratedly verify the feasibility of the combined attitude mode and receiver PCVs. The orbital accuracy with receiver PCVs map using nominal attitude, event file, the combined attitude, and quaternions are approximately 197.98 cm, 7.28 cm, 5.70 cm, and 2.97 cm, respectively. The accuracy using the combined attitude is higher than that of event file, which also prove the feasibility of the combined attitude in integrated POD. The integrated effects of attitude modes and receiver PCVs for POD accuracy and stability are almost consistent with the effect of a single variable.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Dumont, J.P.; Rosmorduc, V.; Carrere, L.; Picot, N.; Bronner, E.; Couhert, A.; Guillot, A.; Desai, S.; Bonekamp, H.; Figa, J.; et al. Jason-3 Products Handbook; 2015. Available online: https://www.ospo.noaa.gov/Products/documents/hdbk_j3.pdf (accessed on 26 May 2019).
- Lemoine, F.G.; Zelensky, N.P.; Chinn, D.S.; Pavlis, D.E.; Rowlands, D.D.; Beckley, B.D.; Luthcke, S.B.; Willis, P.; Ziebart, M.; Sibthorpe, A.; et al. Towards development of a consistent orbit series for TOPEX, Jason-1, and Jason-2. Adv. Space Res. 2010, 46, 1513–1540. [Google Scholar] [CrossRef]
- Haines, B.; Bar-Sever, Y.; Bertiger, W.; Desai, S.; Willis, P. One-Centimeter Orbit Determination for Jason-1: New GPS-Based Strategies. Mar. Geod. 2004, 27, 299–318. [Google Scholar] [CrossRef]
- Kang, Z.; Tapley, B.; Bettadpur, S.; Ries, J.; Nagel, P.; Pastor, R. Precise orbit determination for the GRACE mission using only GPS data. J. Geod. 2006, 80, 322–331. [Google Scholar] [CrossRef]
- Wu, S.C.; Yunck, T.P.; Thornton, C.L. Reduced-dynamic technique for precise orbit determination of low earth satellites. J. Guid. Control Dyn. 1991, 14, 24–30. [Google Scholar] [CrossRef]
- Beutler, G.; Jäggi, A.; Hugentobler, U.; Mervart, L. Efficient satellite orbit modelling using pseudo-stochastic parameters. J. Geod. 2006, 80, 353–372. [Google Scholar] [CrossRef] [Green Version]
- Montenbruck, O.; Andres, Y.; Bock, H.; van Helleputte, T.; van den Ijssel, J.; Loiselet, M.; Marquardt, C.; Silvestrin, P.; Visser, P.; Yoon, Y. Tracking and orbit determination performance of the GRAS instrument on MetOp-A. GPS Solut. 2008, 12, 289–299. [Google Scholar] [CrossRef] [Green Version]
- Vaze, P.; Neeck, S.; Green, J. The Jason-3 Mission: Completing the transition of ocean altimetry from research to operations. Proc. SPIE 2010, 7826, 1351–1359. [Google Scholar]
- Jäggi, A.; Hugentobler, U.; Beutler, G. Pseudo-Stochastic Orbit Modeling Techniques for Low-Earth Orbiters. J. Geod. 2006, 80, 47–60. [Google Scholar] [CrossRef] [Green Version]
- Kouba, J. A simplified yaw-attitude model for eclipsing GPS satellites. GPS Solut. 2008, 13, 1–12. [Google Scholar] [CrossRef]
- Zhang, B.; Ou, J.; Yuan, Y.; Zhong, S. Yaw attitude of eclipsing GPS satellites and its impact on solutions from precise point positioning. Chin. Sci. Bull. 2010, 55, 3687–3693. [Google Scholar] [CrossRef]
- Montenbruck, O.; Schmid, R.; Mercier, F.; Steigenberger, P.; Noll, C.; Fatkulin, R.; Kogure, S.; Ganeshan, A.S. GNSS satellite geometry and attitude models. Adv. Space Res. 2015, 56, 1015–1029. [Google Scholar] [CrossRef] [Green Version]
- Dai, X.; Ge, M.; Lou, Y.; Shi, C.; Wickert, J.; Schuh, H. Estimating the yaw-attitude of BDS IGSO and MEO satellites. J. Geod. 2015, 89, 1005–1018. [Google Scholar] [CrossRef]
- Montenbruck, O.; Steigenberger, P.; Hugentobler, U. Enhanced solar radiation pressure modeling for Galileo satellites. J. Geod. 2014, 89, 283–297. [Google Scholar] [CrossRef]
- Hwang, C.; Tseng, T.-P.; Lin, T.; Švehla, D.; Schreiner, B. Precise orbit determination for the FORMOSAT-3/COSMIC satellite mission using GPS. J. Geod. 2008, 83, 477–489. [Google Scholar] [CrossRef]
- Cerri, L.; Berthias, J.P.; Bertiger, W.I.; Haines, B.J.; Lemoine, F.G.; Mercier, F.; Ries, J.C.; Willis, P.; Zelensky, N.P.; Ziebart, M. Precision Orbit Determination Standards for the Jason Series of Altimeter Missions. Mar. Geod. 2010, 33, 379–418. [Google Scholar] [CrossRef]
- Sheng, C.; Gan, W.; Zhao, C.; Sun, B.; Liang, S.; Chen, W.; Xiao, G. Assessment of Precise Orbit Determination of Jason-2 Satellite Using Different Observation Technologies. Acta Geod. Cartogr. Sin. 2014, 43, 796–802. [Google Scholar]
- Schmid, R.; Steigenberger, P.; Gendt, G.; Ge, M.; Rothacher, M. Generation of a consistent absolute phase center correction model for GPS receiver and satellite antennas. J. Geod. 2007, 81, 781–798. [Google Scholar] [CrossRef]
- Guo, J.; Xu, X.; Zhao, Q.; Liu, J. Precise orbit determination for quad-constellation satellites at Wuhan University: Strategy, result validation, and comparison. J. Geod. 2016, 90, 143–159. [Google Scholar] [CrossRef]
- Huang, G.; Yan, X.; Zhang, Q.; Liu, C.; Wang, L.; Qin, Z. Estimation of antenna phase center offset for BDS IGSO and MEO satellites. GPS Solut. 2018, 22, 49. [Google Scholar] [CrossRef]
- Montenbruck, O.; Garcia-Fernandez, M.; Yoon, Y.; Schön, S.; Jäggi, A. Antenna phase center calibration for precise positioning of LEO satellites. GPS Solut. 2008, 13, 23–34. [Google Scholar] [CrossRef]
- Jäggi, A.; Dach, R.; Montenbruck, O.; Hugentobler, U.; Bock, H.; Beutler, G. Phase center modeling for LEO GPS receiver antennas and its impact on precise orbit determination. J. Geod. 2009, 83, 1145–1162. [Google Scholar] [CrossRef] [Green Version]
- Tu, J.; Gu, D.; Wu, Y.; Yi, D. Phase Residual Estimations for PCVs of Spaceborne GPS Receiver Antenna and Their Impacts on Precise Orbit Determination of GRACE Satellites. Chin. J. Aeronaut. 2012, 25, 631–639. [Google Scholar] [CrossRef] [Green Version]
- Bock, H.; Jäggi, A.; Meyer, U.; Dach, R.; Beutler, G. Impact of GPS antenna phase center variations on precise orbits of the GOCE satellite. Adv. Space Res. 2011, 47, 1885–1893. [Google Scholar] [CrossRef]
- van den Ijssel, J.; Encarnação, J.; Doornbos, E.; Visser, P. Precise science orbits for the Swarm satellite constellation. Adv. Space Res. 2015, 56, 1042–1055. [Google Scholar] [CrossRef]
- Guo, J.; Zhao, Q.; Li, M.; Hu, Z. Centimeter Level Orbit Determination for HY2A Using GPS Data. Geomat. Inf. Sci. Wuhan Univ. 2013, 38, 52–55. [Google Scholar]
- Yuan, J.; Zhao, C.; Wu, Q. Phase Center Offset and Phase Center Variation Estimation In-flight for ZY-3 01 and ZY-3 02 Spaceborne GPS Antennas and the Influence on Precision Orbit Determination. Acta Geod. Cartogr. Sin. 2018, 47, 672–682. [Google Scholar]
- Bertiger, W.; Desai, S.D.; Dorsey, A.; Haines, B.J.; Harvey, N.; Kuang, D.; Sibthorpe, A.; Weiss, J.P. Sub-Centimeter Precision Orbit Determination with GPS for Ocean Altimetry. Mar. Geod. 2010, 33, 363–378. [Google Scholar] [CrossRef]
- Melachroinos, S.A.; Lemoine, F.G.; Zelensky, N.P.; Rowlands, D.D.; Luthcke, S.B.; Klosko, S.M.; Dimarzio, J.; Pavlis, D.E.; Bordyugov, O. Status of Precise Orbit Determination for Jason-2 using GPS. In Proceedings of the Ocean Surface Topography Science Team Meeting, San Diego, CA, USA, 19 October 2011. [Google Scholar]
- Bar-Sever, Y.E. A new model for GPS yaw attitude. J. Geod. 1996, 70, 714–723. [Google Scholar] [CrossRef]
- Gu, D.; Lai, Y.; Liu, J.; Ju, B.; Tu, J. Spaceborne GPS receiver antenna phase center offset and variation estimation for the Shiyan 3 satellite. Chin. J. Aeronaut. 2016, 29, 1335–1344. [Google Scholar] [CrossRef] [Green Version]
- Guo, J.; Zhao, Q.; Guo, X.; Liu, X.; Liu, J.; Zhou, Q. Quality assessment of onboard GPS receiver and its combination with DORIS and SLR for Haiyang 2A precise orbit determination. Sci. Chin.-Earth Sci. 2014, 58, 138–150. [Google Scholar] [CrossRef]
- Yoon, Y.T.; Eineder, M.; Yague-Martinez, N.; Montenbruck, O. TerraSAR-X Precise Trajectory Estimation and Quality Assessment. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1859–1868. [Google Scholar] [CrossRef]
- Li, K.; Zhou, X.; Wang, W.; Gao, Y.; Zhao, G.; Tao, E.; Xu, K. Centimeter-Level Orbit Determination for TG02 Spacelab Using Onboard GNSS Data. Sensors 2018, 18, 2671. [Google Scholar] [CrossRef] [PubMed]
- Arnold, D.; Meindl, M.; Beutler, G.; Dach, R.; Schaer, S.; Lutz, S.; Prange, L.; Sośnica, K.; Mervart, L.; Jäggi, A. CODE’s new solar radiation pressure model for GNSS orbit determination. J. Geod. 2015, 89, 775–791. [Google Scholar] [CrossRef]
- Pearlman, M.R.; Degnan, J.J.; Bosworth, J.M. The International Laser Ranging Service. Adv. Space Res. 2002, 30, 135–143. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Module/Parameter | Selection/Description |
|---|---|
| Force | |
| Gravity model | EIGEN-6S4 |
| N-body perturbation | JPL DE405 |
| Solid earth tide | TIDE2000 |
| Ocean tide | FES2004 |
| Solar radiation pressure | ECOM2 model [35] |
| Atmosphere drag | Pseudo-stochastic pulse |
| Data parameter | |
| Data type | Code and phase observation of ionosphere-free combination |
| Data interval | 30 s |
| Cut-off elevation angle | 7° |
| Arc length | 24 h |
| Satellite ephemeris and clock | CODE precise products |
| Attitude | Attitude model/Quaternions |
| Receiver antenna PCO/PCV | Direct/Residuals approach |
| Estimation parameter | |
| Initial state parameters | Six Keplerian osculating elements |
| Solar radiation pressure | ECOM2 parameters |
| Receiver clock error | One per epoch as process noise |
| Pseudo-stochastic pulse | One group per 6 min in the RTN directions |
| Ambiguities | Float solutions of ionosphere-free combination |
| Attitude Mode | Initial Bias | Estimation Bias | Initial Bias | Estimation Bias |
|---|---|---|---|---|
| Nominal | −24.4 | 36.2 (148.4%) | −100.2 | 124.8 (124.6%) |
| Combined | −24.4 | −18.8 (77.0%) | −100.2 | −62.8 (62.7%) |
| Quaternion | −24.4 | −3.5 (14.3%) | −100.2 | 5.1 (5.1%) |
| Our Orbits-CNES | R-RMS | T-RMS | N-RMS | 3D-RMS |
|---|---|---|---|---|
| No PCVs | 11.3 | 27.7 | 14.5 | 33.2 |
| PCVs | 11.3 | 21.7 | 12.7 | 27.5 |
| Mean | STD | RMS | Mean | STD | RMS | ||
|---|---|---|---|---|---|---|---|
| no PCVs | 1.1 | 14.4 | 14.7 | no PCVs | 3.3 | 20.1 | 21.7 |
| PCVs | −3.7 | 13.2 | 14.0 | PCVs | −0.8 | 17.2 | 17.6 |
| Scheme | CNES Orbits Validation | SLR Validation | |||||
|---|---|---|---|---|---|---|---|
| R-RMS | T-RMS | N-RMS | 3D-RMS | Mean | STD | RMS | |
| 1 (Normal + nopcv) | 35.89 | 179.61 | 78.72 | 199.36 | 9.45 | 71.54 | 72.62 |
| 2 (Event file + nopcv) | 2.66 | 6.65 | 2.36 | 7.54 | 0.23 | 2.22 | 2.43 |
| 3 (Combined + nopcv) | 2.22 | 5.22 | 2.16 | 6.07 | 0.27 | 2.21 | 2.44 |
| 4 (Quaternions + nopcv) | 1.26 | 2.83 | 1.50 | 3.44 | −0.09 | 1.93 | 2.11 |
| 5 (Normal + pcv) | 35.94 | 178.14 | 78.55 | 197.98 | 8.89 | 71.58 | 72.58 |
| 6 (Event file + pcv) | 2.79 | 6.38 | 2.13 | 7.28 | −0.32 | 2.12 | 2.29 |
| 7 (Combined + pcv) | 2.34 | 4.86 | 1.85 | 5.70 | −0.27 | 2.07 | 2.26 |
| 8 (Quaternions + pcv) | 1.33 | 2.38 | 1.17 | 2.97 | −0.44 | 1.76 | 2.01 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, M.; Yuan, Y.; Ou, J.; Chai, Y. Research on Attitude Models and Antenna Phase Center Correction for Jason-3 Satellite Orbit Determination. Sensors 2019, 19, 2408. https://doi.org/10.3390/s19102408
Liu M, Yuan Y, Ou J, Chai Y. Research on Attitude Models and Antenna Phase Center Correction for Jason-3 Satellite Orbit Determination. Sensors. 2019; 19(10):2408. https://doi.org/10.3390/s19102408
Chicago/Turabian StyleLiu, Mingming, Yunbin Yuan, Jikun Ou, and Yanju Chai. 2019. "Research on Attitude Models and Antenna Phase Center Correction for Jason-3 Satellite Orbit Determination" Sensors 19, no. 10: 2408. https://doi.org/10.3390/s19102408
APA StyleLiu, M., Yuan, Y., Ou, J., & Chai, Y. (2019). Research on Attitude Models and Antenna Phase Center Correction for Jason-3 Satellite Orbit Determination. Sensors, 19(10), 2408. https://doi.org/10.3390/s19102408