Analysis of Electrical Resistance and Impedance Change of Magnetorheological Gels with DC and AC Voltage for Magnetometer Application


Abstract
:1. Introduction
2. Experimental Methods
2.1. MRG Sample Preparation
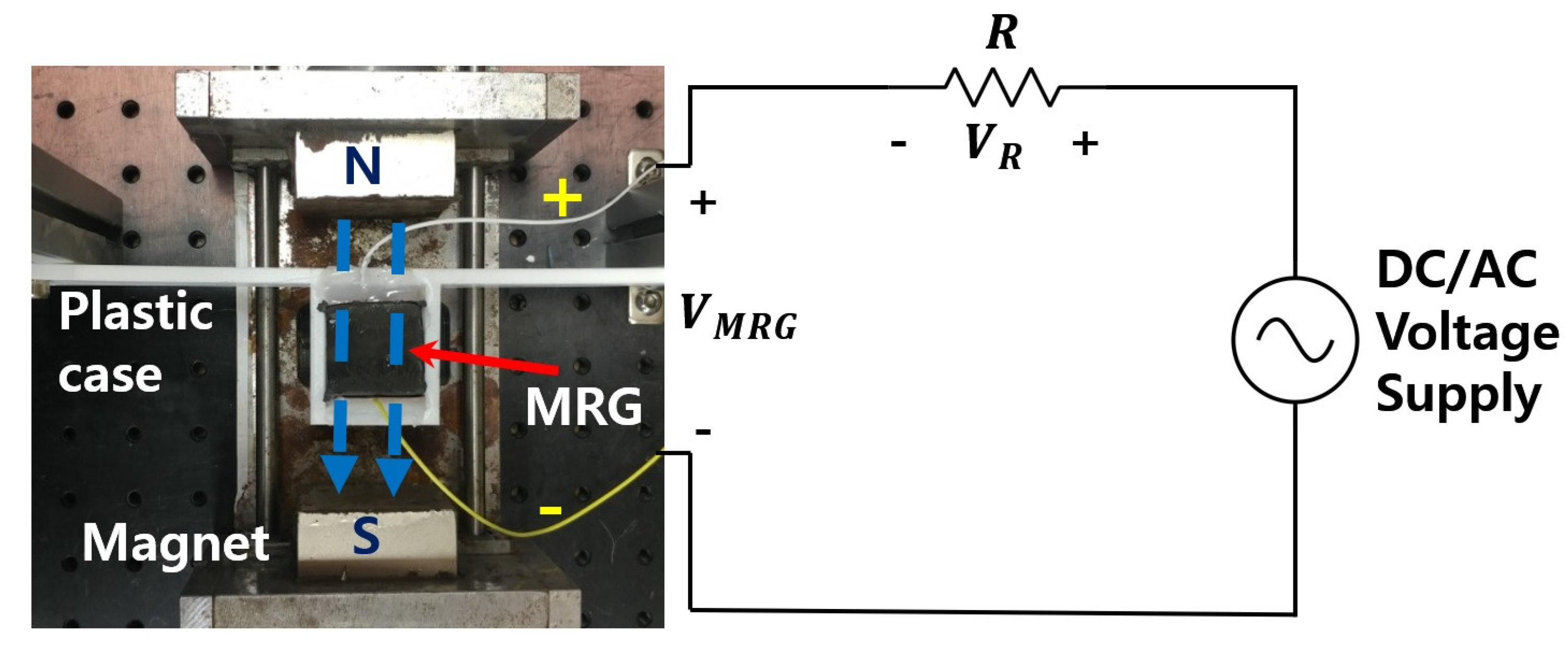
2.2. Experimental Setup
3. Variation of Electrical Resistance with DC Input Voltage and Magnetic Field
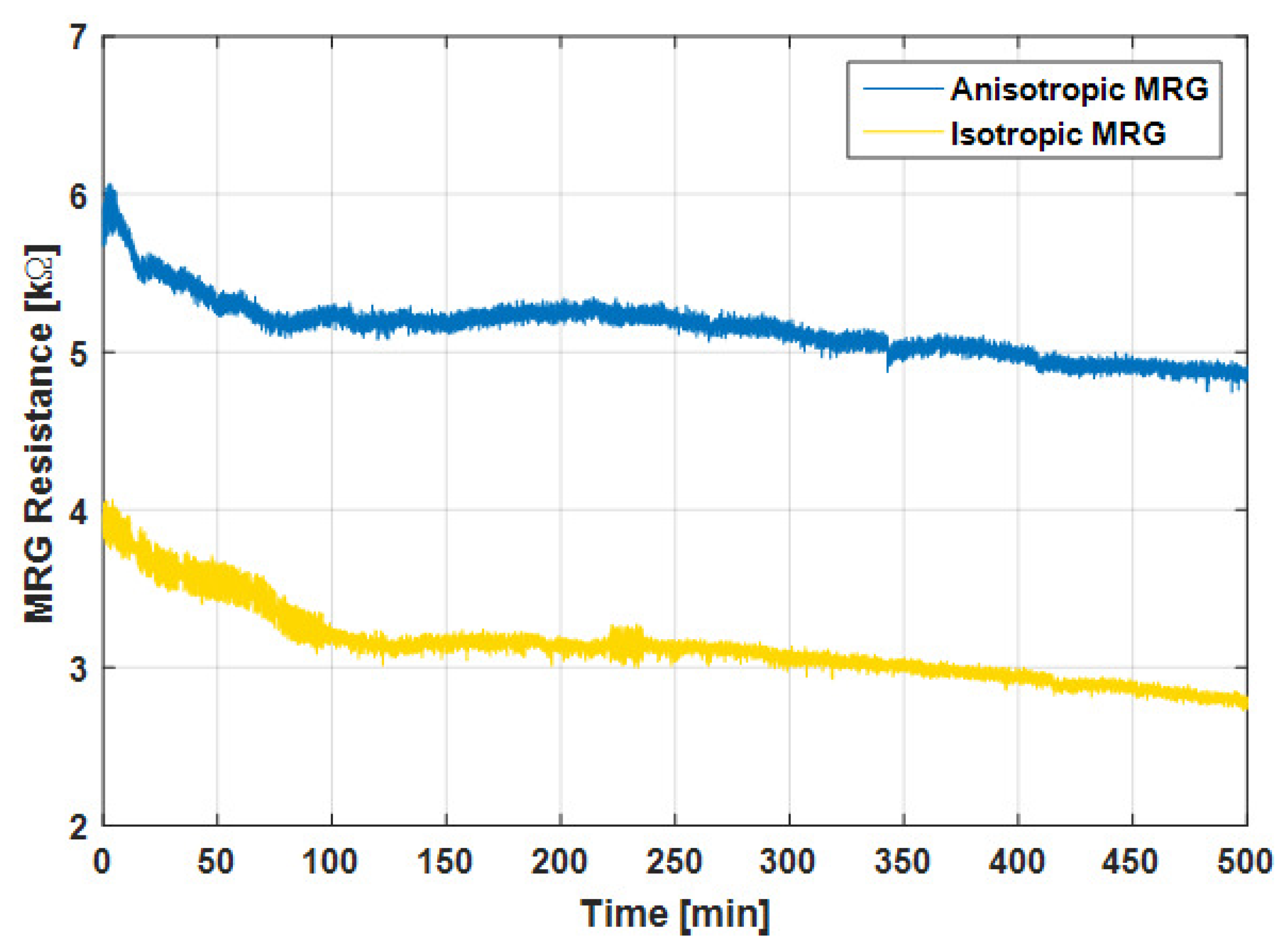
3.1. Effect of Chain Structure on MRG Resistance Change
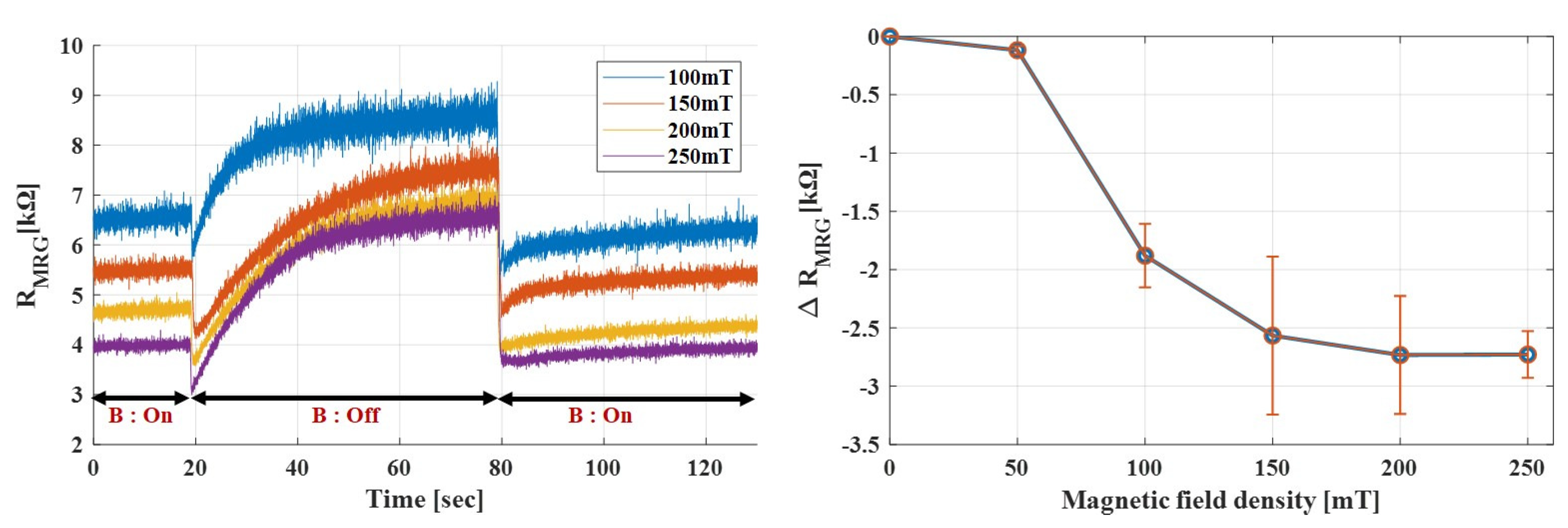
3.2. Effect of Magnetic Field on MRG Resistance under DC Input Voltage
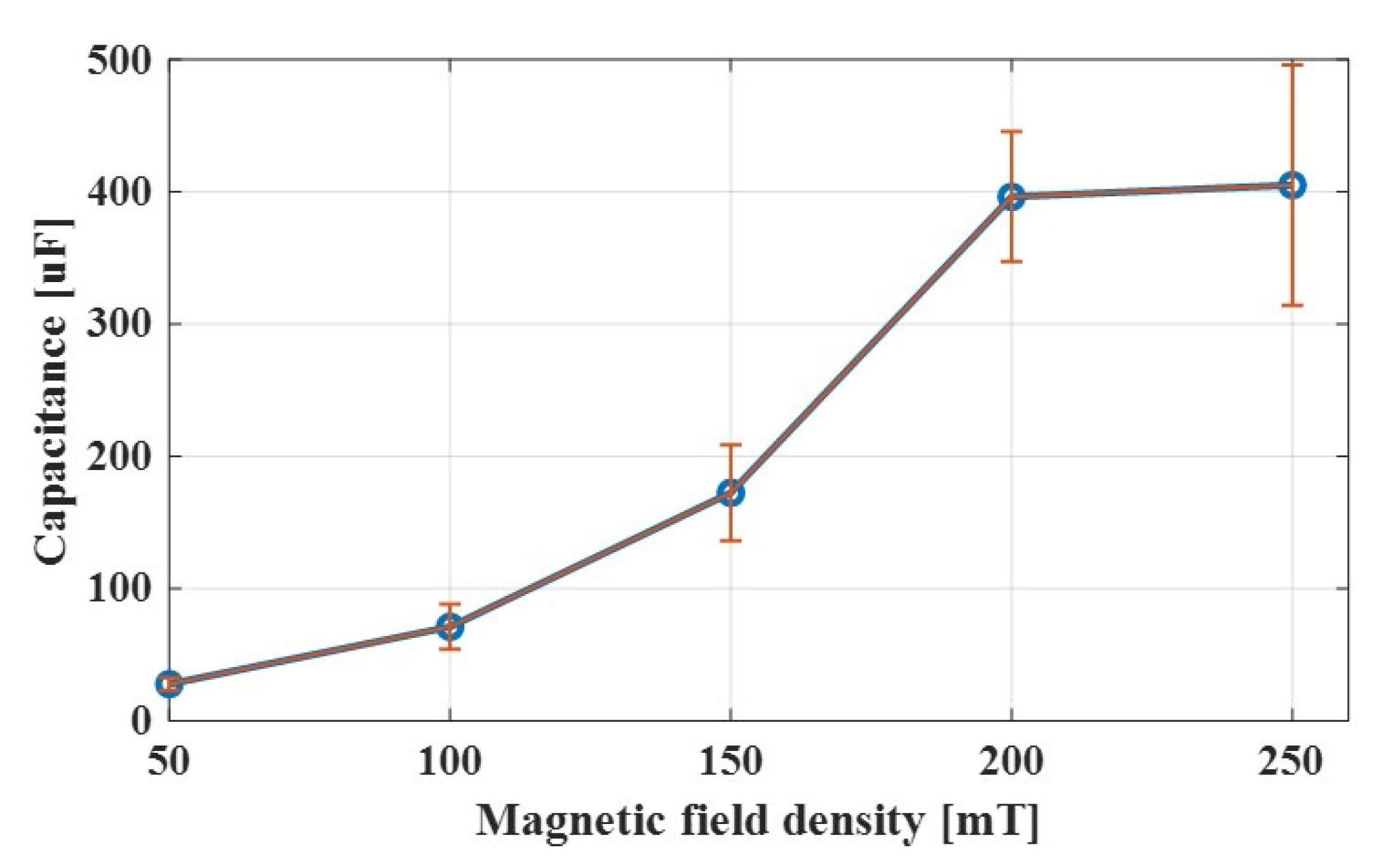
3.3. Effect of Magnetic Field on MRG Capacitance
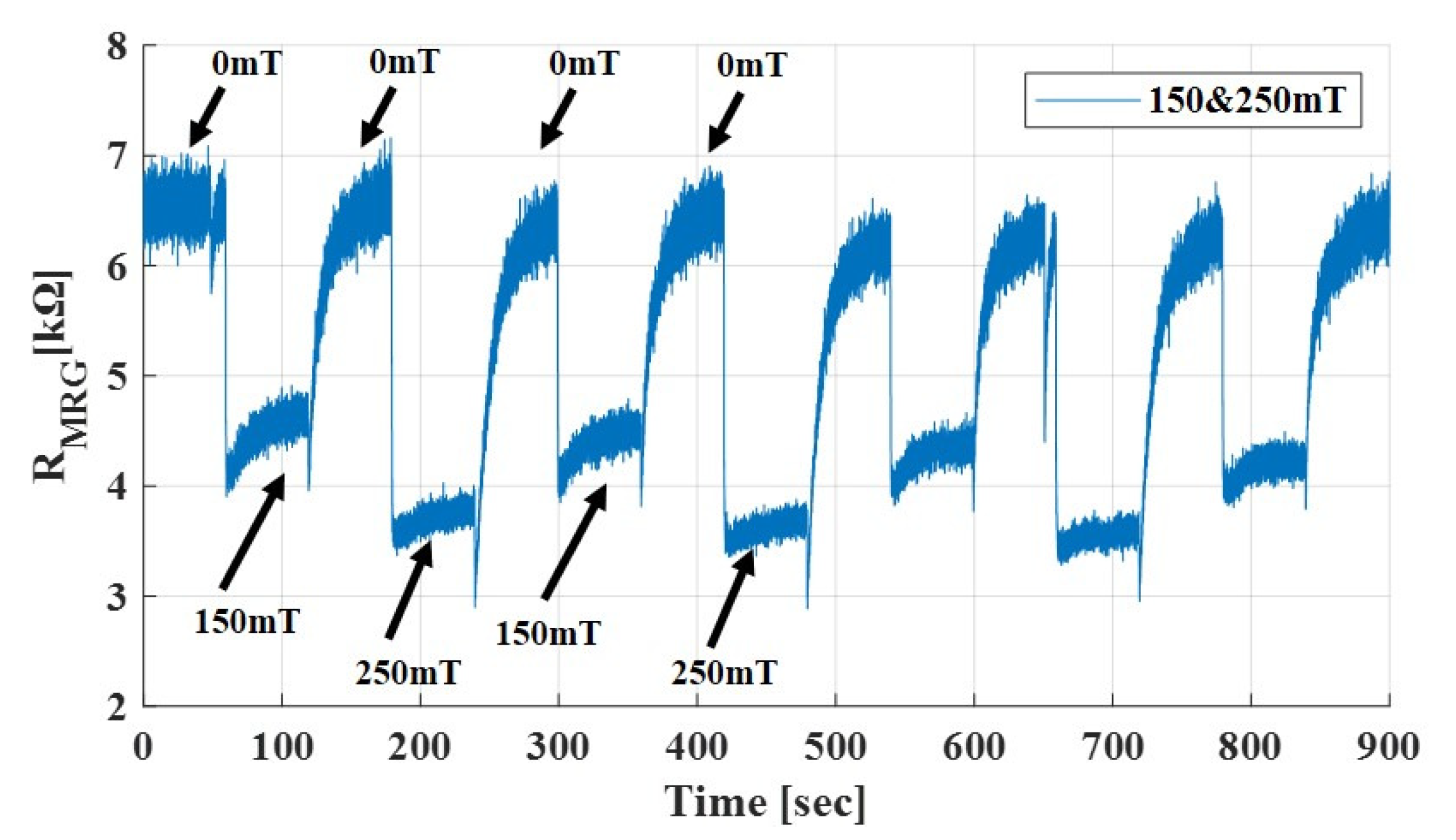
3.4. Repeatability of MRG Resistance under DC Voltage
4. Effect of Magnetic Field on MRG Impedance Change under AC Input Voltage
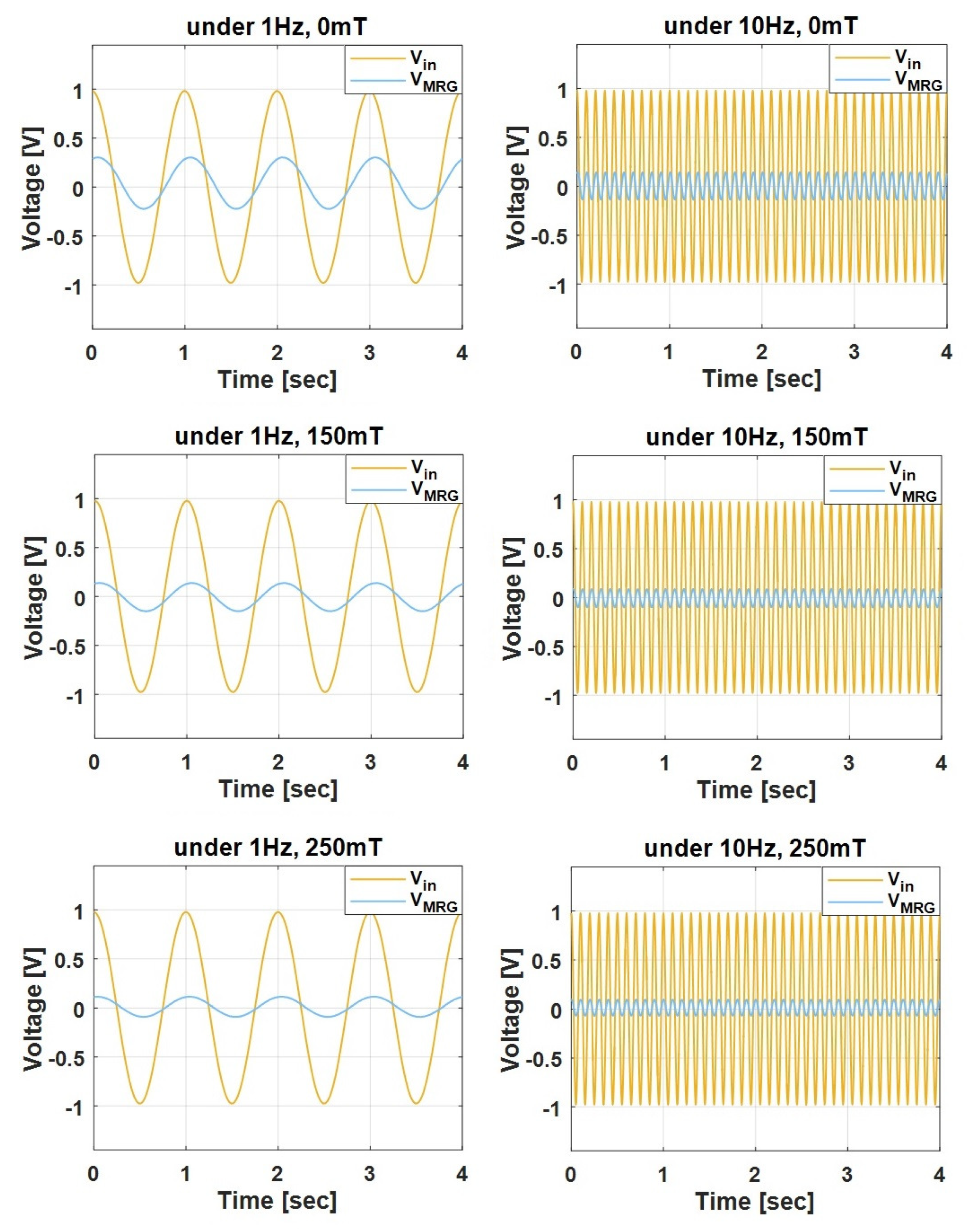
4.1. MRG Impedance under a Constant AC Frequency
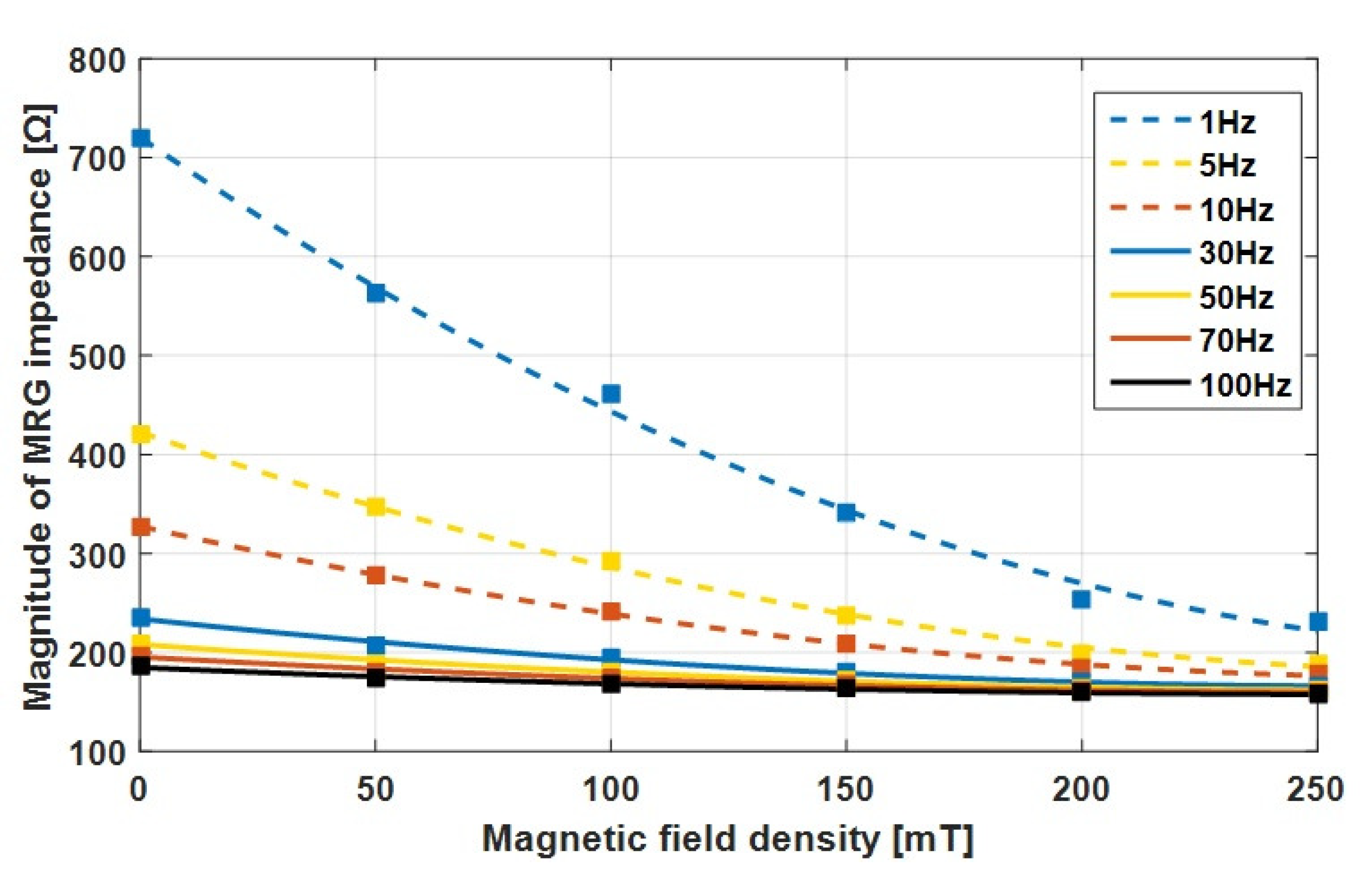
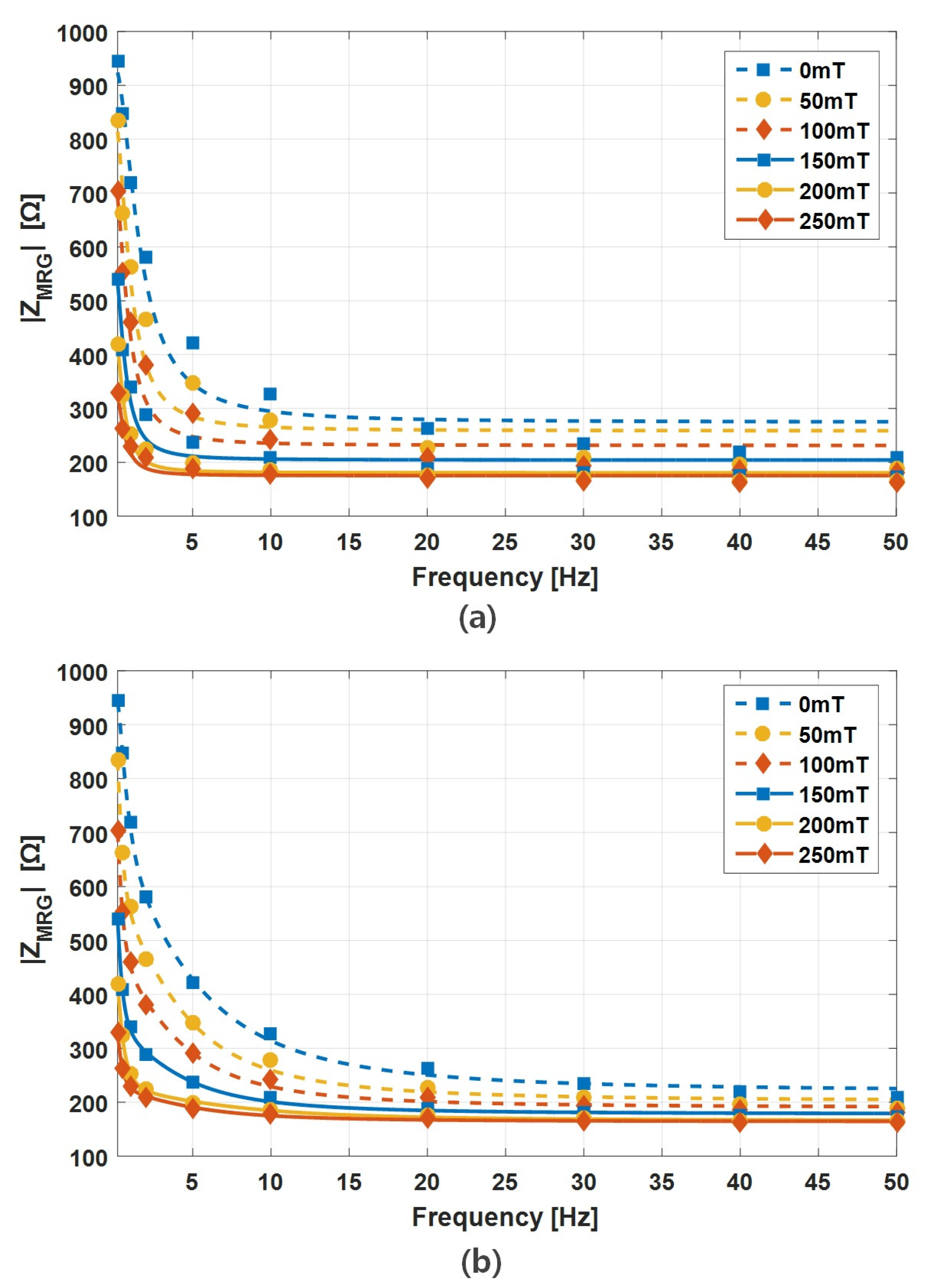
4.2. MRG Impedance under Various AC Frequency
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Shin, B.C.; Yoon, J.H.; Kim, Y.K.; Kim, K.S. Note: Vibration suppression using tunable vibration absorber based on stiffness variable magneto-rheological gel. Rev. Sci. Instrum. 2015, 86, 106106. [Google Scholar] [CrossRef] [PubMed]
- Wilson, M.J.; Fuchs, A.; Gordaninejad, F. Development and characterization of magnetorheological polymer gels. J. Appl. Polym. Sci. 2002, 84, 2733–2742. [Google Scholar] [CrossRef]
- Fuchs, A.; Gordaninejad, F.; Blattman, D.; Hamann, G.H. Magnetorheological Polymer Gels. U.S. Patent 6,527,972, 4 March 2003. [Google Scholar]
- Fuchs, A.; Xin, M.; Gordaninejad, F.; Wang, X.; Hitchcock, G.H.; Gecol, H.; Evrensel, C.; Korol, G. Development and characterization of hydrocarbon polyol polyurethane and silicone magnetorheological polymeric gels. J. Appl. Polym. Sci. 2004, 92, 1176–1182. [Google Scholar] [CrossRef]
- Negami, K.; Mitsumata, T. Magnetorheological behaviour of magnetic carrageenan gels against shear and compression strains. e-Polymers 2011, 11, 382–388. [Google Scholar] [CrossRef] [Green Version]
- Xu, Y.; Gong, X.; Xuan, S. Soft magnetorheological polymer gels with controllable rheological properties. Smart Mater. Struct. 2013, 22, 075029. [Google Scholar] [CrossRef]
- Kim, Y.K.; Koo, J.; Kim, K.S.; Kim, S. Suppressing harmonic vibrations of a miniature cryogenic cooler using an adaptive tunable vibration absorber based on magneto-rheological elastomers. Rev. Sci. Instrum. 2011, 82, 035103. [Google Scholar] [CrossRef] [PubMed]
- Kim, Y.K.; Bae, H.I.; Koo, J.H.; Kim, K.S.; Kim, S. Note: Real time control of a tunable vibration absorber based on magnetorheological elastomer for suppressing tonal vibrations. Rev. Sci. Instrum. 2012, 83, 046108. [Google Scholar] [CrossRef] [PubMed]
- Deng, H.X.; Gong, X.L.; Wang, L.H. Development of an adaptive tuned vibration absorber with magnetorheological elastomer. Smart Mater. Struct. 2006, 15, N111. [Google Scholar] [CrossRef]
- Komatsuzaki, T.; Inoue, T.; Iwata, Y. Experimental investigation of an adaptively tuned dynamic absorber incorporating magnetorheological elastomer with self-sensing property. Exp. Mech. 2016, 56, 871–880. [Google Scholar] [CrossRef]
- Xu, Z.; Gong, X.; Liao, G.; Chen, X. An active-damping-compensated magnetorheological elastomer adaptive tuned vibration absorber. J. Intell. Mater. Syst. Struct. 2010, 21, 1039–1047. [Google Scholar] [CrossRef]
- Kim, H.K.; Kim, H.S.; Kim, Y.K. Stiffness control of magnetorheological gels for adaptive tunable vibration absorber. Smart Mater. Struct. 2016, 26, 015016. [Google Scholar] [CrossRef]
- Bica, I. Influence of the transverse magnetic field intensity upon the electric resistance of the magnetorheological elastomer containing graphite microparticles. Mater. Lett. 2009, 63, 2230–2232. [Google Scholar] [CrossRef]
- Bica, I. Influence of the magnetic field on the electric conductivity of magnetorheological elastomers. J. Ind. Eng. Chem. 2010, 16, 359–363. [Google Scholar] [CrossRef]
- Wang, X.; Gordaninejad, F.; Calgar, M.; Liu, Y.; Sutrisno, J.; Fuchs, A. Sensing behavior of magnetorheological elastomers. J. Mech. Des. 2009, 131, 091004. [Google Scholar] [CrossRef]
- Komatsuzaki, T.; Inoue, T.; Iwata, Y. MRE-Based Adaptive-Tuned Dynamic Absorber with Self-Sensing Function for Vibration Control of Structures. In ASME 2014 Conference on Smart Materials, Adaptive Structures and Intelligent Systems; American Society of Mechanical Engineers: New York, NY, USA, 2014; p. V001T03A011. [Google Scholar]
- Sun, S.; Yang, J.; Li, W.; Deng, H.; Du, H.; Alici, G. Development of an MRE adaptive tuned vibration absorber with self-sensing capability. Smart Mater. Struct. 2015, 24, 095012. [Google Scholar] [CrossRef]
- Yu, M.; Ju, B.; Fu, J.; Liu, S.; Choi, S.B. Magnetoresistance characteristics of magnetorheological gel under a magnetic field. Ind. Eng. Chem. Res. 2014, 53, 4704–4710. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 0 | 50 mT | 100 mT | 150 mT | 200 mT | 250 mT | ||
|---|---|---|---|---|---|---|---|
| 1 Hz | 579.8 | 465.4 | 380.2 | 287.9 | 225.2 | 209 | |
| 31.9 | 31.0 | 27.8 | 23.3 | 17.8 | 16.0 | ||
| 10 Hz | 262.7 | 227.7 | 208.1 | 189.1 | 174.4 | 169.7 | |
| 28.9 | 26.0 | 20.8 | 13.9 | 8.7 | 7.3 |
| Voltage Freq. | Adjusted R-Square | |||
|---|---|---|---|---|
| 1 Hz | 5166 | −3286 | 720.4 | 0.9934 |
| 5 Hz | 2793 | −1646 | 422.7 | 0.9967 |
| 10 Hz | 1871 | −1072 | 327.6 | 0.9977 |
| 30 Hz | 941.8 | −507.6 | 234 | 0.9920 |
| 50 Hz | 628.5 | −341.5 | 208.1 | 0.9823 |
| 70 Hz | 495.1 | −266.2 | 195.5 | 0.9791 |
| 100 Hz | 369.6 | −201 | 184.8 | 0.9777 |
| Magnetic Flux Density | Adjusted R-Square | |||
|---|---|---|---|---|
| 0 mT | 274.4 | 661.0 | 0.0002 | 0.9814 |
| 50 mT | 258.4 | 581.5 | 0.0004 | 0.9543 |
| 100 mT | 231.2 | 487.0 | 0.0005 | 0.9615 |
| 150 mT | 204.2 | 362.0 | 0.0008 | 0.9663 |
| 200 mT | 180.6 | 270.6 | 0.0013 | 0.9856 |
| 250 mT | 175.2 | 171.2 | 0.0019 | 0.9599 |
| Magnetic Flux Density | Adjusted R-Square | |||||
|---|---|---|---|---|---|---|
| 0 mT | 219.0 | 445.4 | 302.9 | 0.0005 | 0.0001 | 0.9993 |
| 50 mT | 202.0 | 431.5 | 288.1 | 0.0011 | 0.0002 | 0.9985 |
| 100 mT | 189.9 | 382.9 | 204.0 | 0.0012 | 0.0002 | 0.9986 |
| 150 mT | 178.0 | 316.7 | 114.7 | 0.0016 | 0.0003 | 0.9988 |
| 200 mT | 165.4 | 254.2 | 44.59 | 0.0017 | 0.0005 | 0.9996 |
| 250 mT | 163.9 | 160.7 | 46.45 | 0.0033 | 0.0007 | 0.9983 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, J.-E.; Yun, G.-E.; Jang, D.-I.; Kim, Y.-K. Analysis of Electrical Resistance and Impedance Change of Magnetorheological Gels with DC and AC Voltage for Magnetometer Application. Sensors 2019, 19, 2510. https://doi.org/10.3390/s19112510
Park J-E, Yun G-E, Jang D-I, Kim Y-K. Analysis of Electrical Resistance and Impedance Change of Magnetorheological Gels with DC and AC Voltage for Magnetometer Application. Sensors. 2019; 19(11):2510. https://doi.org/10.3390/s19112510
Chicago/Turabian StylePark, Jae-Eun, Ga-Eun Yun, Dae-Ik Jang, and Young-Keun Kim. 2019. "Analysis of Electrical Resistance and Impedance Change of Magnetorheological Gels with DC and AC Voltage for Magnetometer Application" Sensors 19, no. 11: 2510. https://doi.org/10.3390/s19112510
APA StylePark, J. -E., Yun, G. -E., Jang, D. -I., & Kim, Y. -K. (2019). Analysis of Electrical Resistance and Impedance Change of Magnetorheological Gels with DC and AC Voltage for Magnetometer Application. Sensors, 19(11), 2510. https://doi.org/10.3390/s19112510