Study of Transfer Characteristics of a Molecular Electronic Sensor for Borehole Surveys at High Temperatures and Pressures


Abstract
:1. Introduction
- (1)
- Significantly higher (10 times) sensitivity (in particular at low frequencies. This is very important for seismic applications);
- (2)
- Low noise at low frequencies.
2. Experimental Part
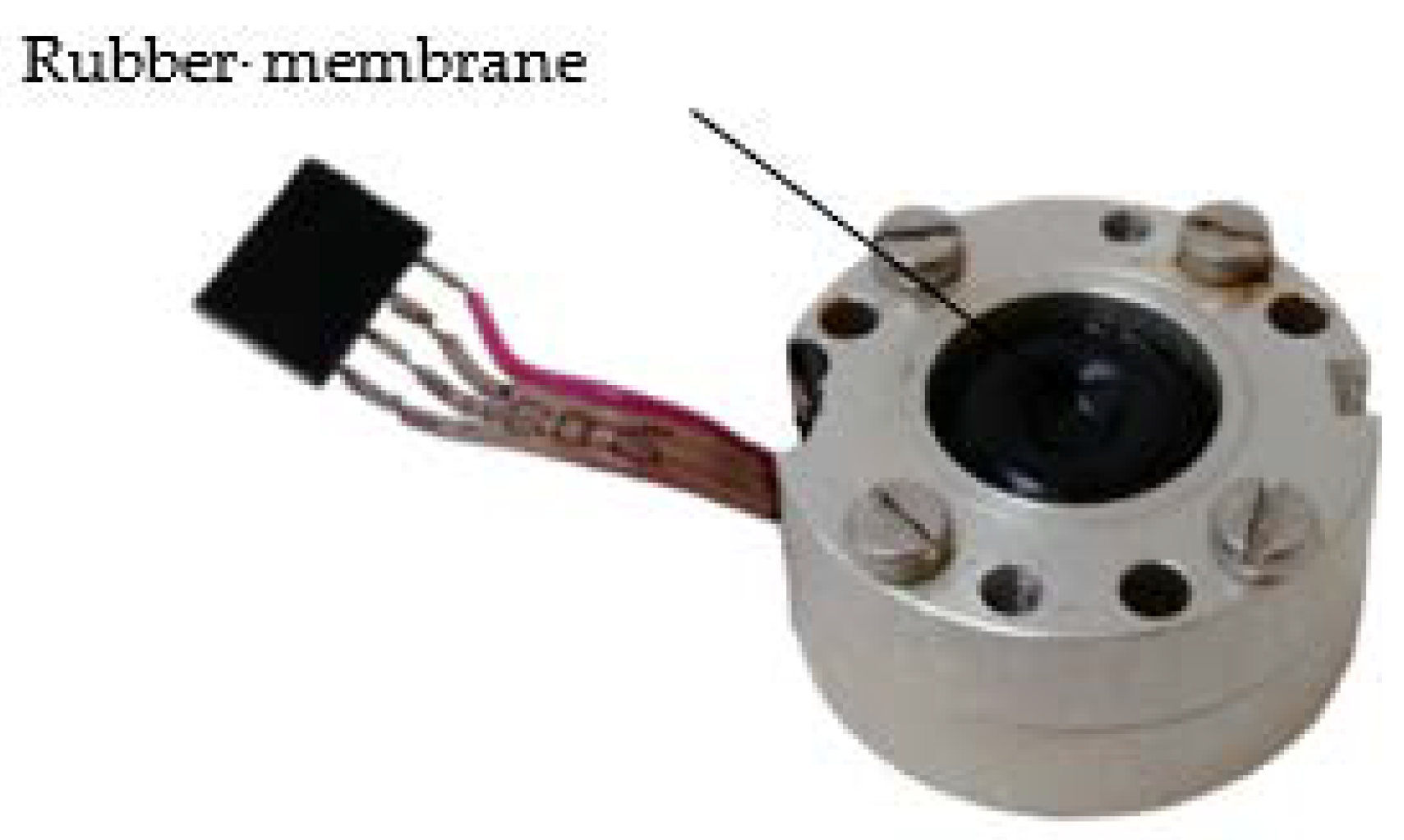
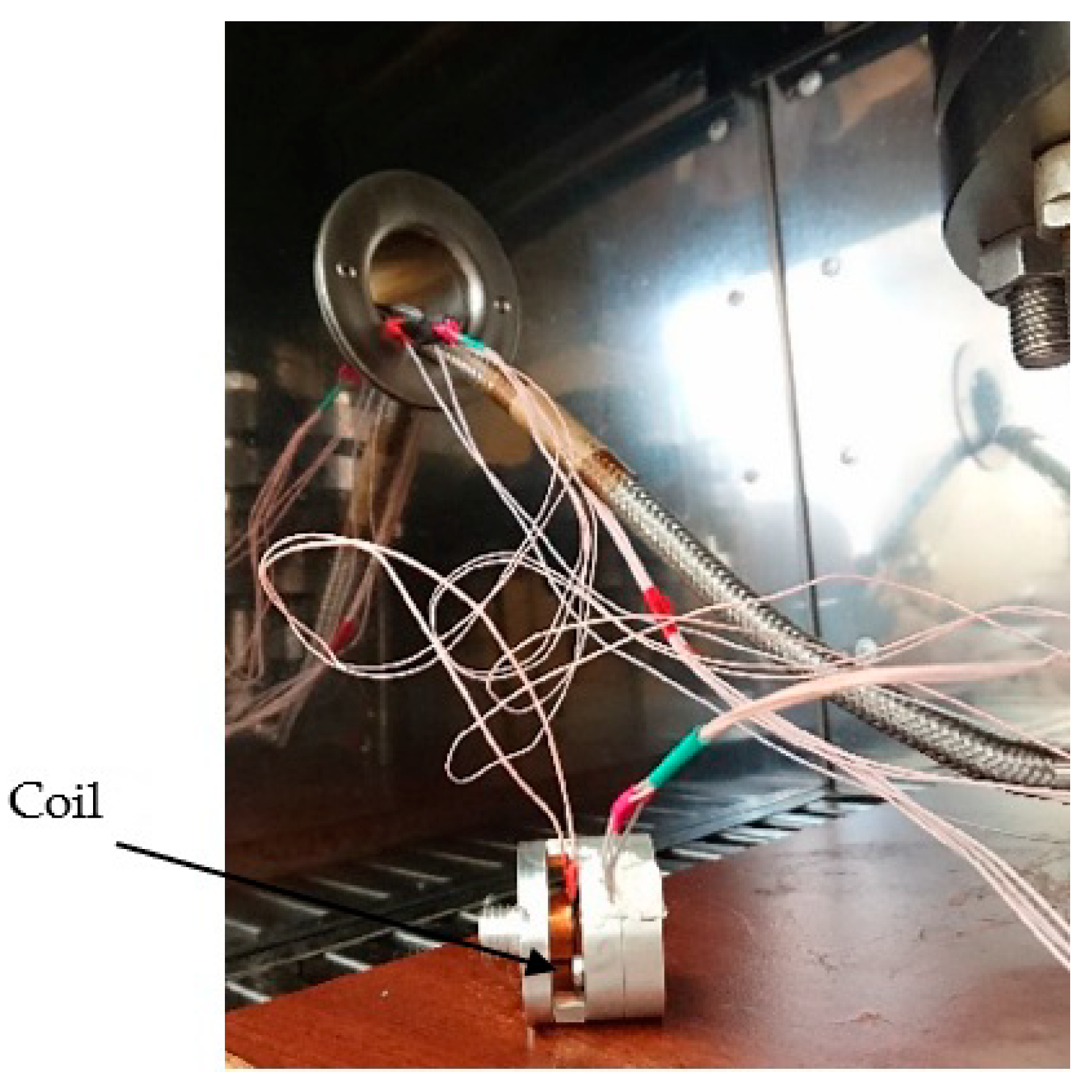
2.1. Experimental Setup
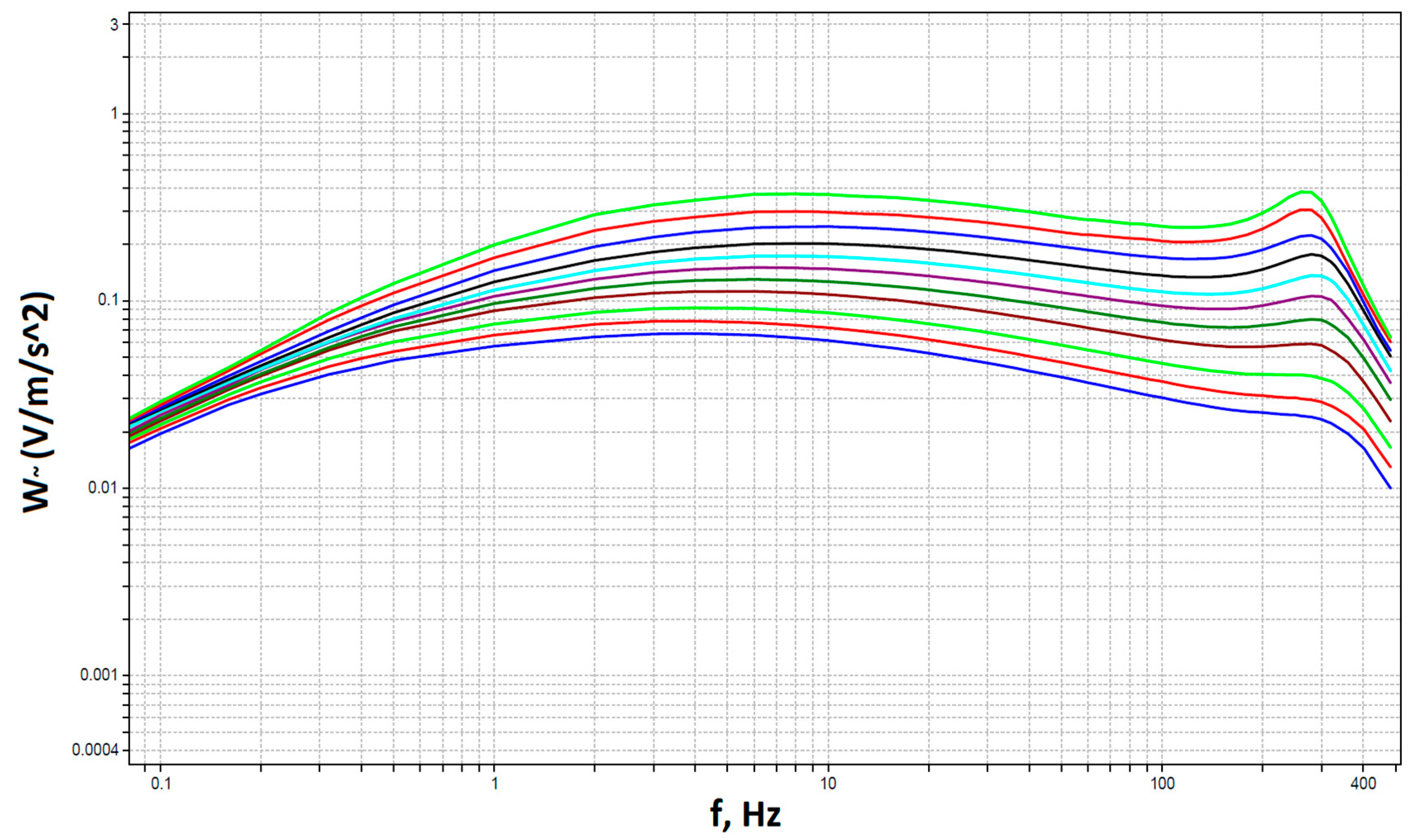
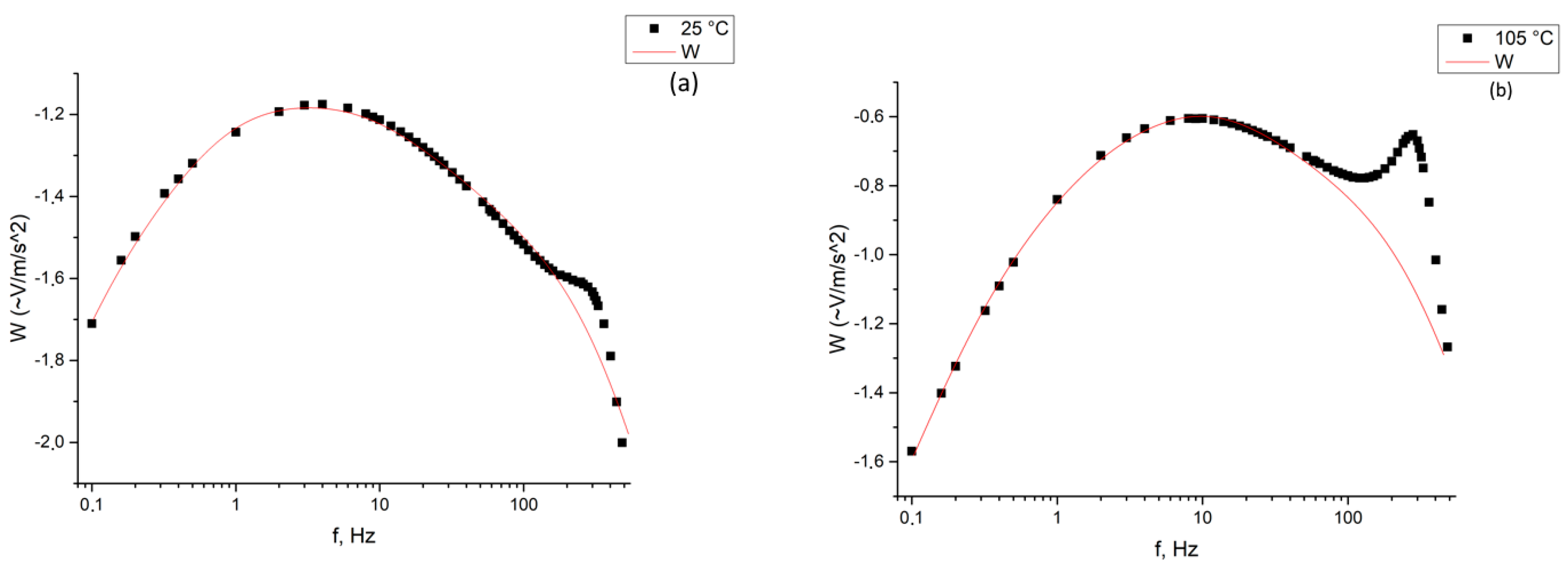
2.2. Experimental Data Processing
3. Verification of Found Patterns
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References and Notes
- Harrison, D.; Parris, M.; James, S.; Mueller, F.; Ray, S.; Riding, M.; Temple, L.; Wutherich, K. High-Pressure, High-Temperature Technologies, Oilfield Review. Available online: https://www.slb.com/~/media/Files/resources/oilfield_review/ors08/aut08/composite.pdf (accessed on 3 June 2019).
- Osman, A. High-Temperature Drilling Pushes the Limits. Available online: https://www.slb.com/~/media/Files/drilling/industry_articles/201801-epo-high-temperature-erd-middle-east.pdf (accessed on 3 June 2019).
- Liu, Y.; Wang, J.; Ji, W.; Luo, G. Temperature Field Finite Element Analysis of the Ultra-High Temperature Borehole Inclinometer Based on FOG and Its Optimization Design. Chem. Eng. Trans. 2016, 51. [Google Scholar] [CrossRef]
- Karrenbach, M.; Yartsev, V.; Emuh, M.; Hardin, E.; LaFlame, L.; Cole, S.; Chavarria, A. Field Testing A Three-Component Fiber-Optic Borehole Seismic Sensor Array. SEG Tech. Prog. Expand. Abstr. 2014, 5019–5023. [Google Scholar] [CrossRef]
- Yu, C.; Lei, S.; Chen, W.; Song, S. Downhole fiber optic temperature-pressure innovative measuring system used in Sanshing geothermal test site. Geothermics 2018, 74, 190–196. [Google Scholar] [CrossRef]
- Zeng, F.; Lu, L.; Zhang, Y.; Guo, S.; Wong, M.; Chau, K. MEMS pressure sensors for high-temperature high-pressure downhole applications. In Proceedings of the 2016 IEEE International Conference on Electron Devices and Solid-State Circuits, EDSSC 2016, Hong Kong, China, 3–5 August 2016; pp. 39–43. [Google Scholar] [CrossRef]
- Gooneratne, C.P.; Li, B.; Moellendick, T.E. Downhole Applications of Magnetic Sensors Chinthaka. Sensors 2017, 17, 2384. [Google Scholar] [CrossRef] [PubMed]
- Blias, E.; Shavina, L. High Frequency VSP Methodology and Its Application to the Detailed Investigation of Near-well Space. In Proceedings of the Society of Exploration Geophysicists Annual Meeting (SEG 1999), Houston, TX, USA, 31 October–5 November 1999. [Google Scholar]
- Rubtsov, A.A.; Efimova, N.I.; Mirzoyan, Y.D. Exploration of Giological Section by PM VSP in High-Temperature Oil and Gas Wells. Available online: http://geovers.com/base/files/gr12/papers/4_gr2012_vsp_RubtsovAA.pdf (accessed on 3 June 2019).
- Kästner, F.; Giese, R.; Planke, S.; Millett, J.M.; Flóvenz, Ó.G. Seismic imaging in the Krafla high temperature geothermal field, NE Iceland, using zero- and far-offset vertical seismic profiling (VSP) data. J. Volcanol. Geotherm. Res. 2018. [Google Scholar] [CrossRef]
- Bugaev, A.S.; Antonov, A.N.; Agafonov, B.M.; Belotelov, K.; Vergeles, S.S.; Dudkin, P.V.; Egorov, E.V.; Egorov, I.V.; Zhevnenko, D.A.; Zhabin, S.N.; et al. Measuring Devices Based on Molecular-Electronic Transducers. J. Commun. Technol. Electron. 2018, 63, 1339–1351. [Google Scholar] [CrossRef]
- Zaitsev, D.; Egor, E.; Shabalina, A. High resolution miniature MET sensors for healthcare and sport applications. In Proceedings of the 2018 12th International Conference on Sensing Technology (ICST), Limerick, Ireland, 4–6 December 2018; pp. 287–292. [Google Scholar] [CrossRef]
- Agafonov, V.; Antonov, A.; Razin, A.; Avdyukhina, S.; Egorov, I.; Neeshpapa, A.; Dmitry, P. Low-frequency sea-bottom seismic station for offshore exploration. In Proceedings of the 9th Congress of the Balkan Geophysical Society, BGS 2017, Antalya, Turkey, 5–9 November 2017. [Google Scholar] [CrossRef]
- Antonov, A.; Shabalina, A.; Razin, A.; Avdyukhina, S.; Egorov, I.; Agafonov, V. Low-Frequency Seismic Node Based on Molecular-Electronic Transfer Sensors for Marine and Transition Zone Exploration. J. Atmos. Ocean. Technol. 2017, 34, 1743–1748. [Google Scholar] [CrossRef]
- Agafonov, V.M.; Avdyukhina, S.Y.; Bugaev, A.S.; Egorov, E.V.; Zaitsev, D.L. A Molecular-Electronic Hydrophone for Low-Frequency Research of Ambient Noise in the World Ocean. Doklady Earth Sci. 2018, 483, 1579–1581. [Google Scholar] [CrossRef]
- Zaitsev, D.L.; Avdyukhina, S.Y.; Ryzhkov, M.A.; Evseev, I.A.; Egorov, E.V.; Agafonov, V.M. Frequency response and self-noise of the MET hydrophone. J. Sens. Sens. Syst. 2018, 7, 443–452. [Google Scholar] [CrossRef] [Green Version]
- Agafonov, V.M. Modeling the Convective Noise in an Electrochemical Motion Transducer. Int. J. Electrochem. Sci. 2018, 13, 11432–11442. [Google Scholar]
- Zaitsev, D.L.; Agafonov, V.M.; Evseev, I.A. Study of Systems Error Compensation Methods Based on Molecular-Electronic Transducers of Motion Parameters. J. Sens. 2018, 2018, 6261384. [Google Scholar] [CrossRef]
- Kozlov, V.A.; Terent’ev, D.A. Transfer Function of a Diffusion Transducer at Frequencies Exceeding the Thermodynamic Frequency. Russ. J. Electrochem. 2003, 39, 401–406. [Google Scholar] [CrossRef]
- Agafonov, V.M.; Krishtop, V.G. Diffusion Sensor of Mechanical Signals: Frequency Response at High Frequencies. Russ. J. Electrochem. 2004, 40, 537–541. [Google Scholar] [CrossRef]
- Krishtop, V.G. Experimental Modeling of the Temperature Dependence of the Transfer Function of Rotational Motion Sensors Based on Electrochemical Transducers. Russ. J. Electrochem. 2014, 50, 350–354. [Google Scholar] [CrossRef]
- Frenkel, Y.I. Kinetic Theory of Liquids; Nauka (Science): Leningrad, Russia, 1975. [Google Scholar]
- Egorov, I.V.; Shabalina, A.S.; Agafonov, V.M. Design and self-noise of MET closed-loop seismic accelerometers. IEEE Sens. J. 2017, 17, 2008–2014. [Google Scholar] [CrossRef]
- Zaitsev, D.L.; Dudkin, P.V.; Krishtop, T.V.; Neeshpapa, A.V.; Popov, V.G.; Uskov, V.V.; Krishtop, V.G. Experimental Studies of Temperature Dependence of Transfer Function of Molecular Electronic Transducers at High Frequencies. IEEE Sens. J. 2016, 16, 7864–7869. [Google Scholar] [CrossRef]
- Huang, H.; Carande, B.; Tang, R.; Oiler, J.; Zaitsev, D.; Agafonov, V.; Yu, H. A micro seismometer based on molecular electronic transducer technology for planetary exploration. Appl. Phys. Lett. 2013, 102, 193512. [Google Scholar] [CrossRef] [Green Version]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| °C | , s−1 | |||||
|---|---|---|---|---|---|---|
| 25 | 0.11 | 0.72 | 19.13 | 357.96 | 0.76 | 29,493 |
| 35 | 0.13 | 0.79 | 21.32 | 362.92 | 0.74 | 30,980 |
| 45 | 0.16 | 0.88 | 24.25 | 355.26 | 0.68 | 29,977 |
| 55 | 0.20 | 1.03 | 29.30 | 347.73 | 0.61 | 28,958 |
| 65 | 0.20 | 1.28 | 34.53 | 345.20 | 0.55 | 29,165 |
| 75 | 0.22 | 1.51 | 39.85 | 338.40 | 0.51 | 28,840 |
| 85 | 0.22 | 1.92 | 42.09 | 331.96 | 0.47 | 28,446 |
| 95 | 0.27 | 2.17 | 47.45 | 325.42 | 0.45 | 27,343 |
| 105 | 0.35 | 2.51 | 46.44 | 312.83 | 0.45 | 25,427 |
| 115 | 0.42 | 2.75 | 48.02 | 292.16 | 0.40 | 24,608 |
| 125 | 0.59 | 2.80 | 50.01 | 297.98 | 0.38 | 24,341 |
| Error | ||
|---|---|---|
| −1730 | 163 | |
| −1820 | 79 | |
| −1230 | 88 | |
| −1850 | 70 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Evseev, I.; Zaitsev, D.; Agafonov, V. Study of Transfer Characteristics of a Molecular Electronic Sensor for Borehole Surveys at High Temperatures and Pressures. Sensors 2019, 19, 2545. https://doi.org/10.3390/s19112545
Evseev I, Zaitsev D, Agafonov V. Study of Transfer Characteristics of a Molecular Electronic Sensor for Borehole Surveys at High Temperatures and Pressures. Sensors. 2019; 19(11):2545. https://doi.org/10.3390/s19112545
Chicago/Turabian StyleEvseev, Ilya, Dmitry Zaitsev, and Vadim Agafonov. 2019. "Study of Transfer Characteristics of a Molecular Electronic Sensor for Borehole Surveys at High Temperatures and Pressures" Sensors 19, no. 11: 2545. https://doi.org/10.3390/s19112545
APA StyleEvseev, I., Zaitsev, D., & Agafonov, V. (2019). Study of Transfer Characteristics of a Molecular Electronic Sensor for Borehole Surveys at High Temperatures and Pressures. Sensors, 19(11), 2545. https://doi.org/10.3390/s19112545