An Improved Capacitive Sensor for Detecting the Micro-Clearance of Spherical Joints

 , ,
, ,  ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Detecting Method
2.1. Structural Design
2.2. Measuring Principle
3. Mathematical Model
3.1. Clearance between the Sensing Platees and the Ball
3.2. Dependence of Differential Capacitance on Eccentric Displacement
3.3. The Capacitive Fringe Effect Analysis
4. Simulation Setup
5. Experimental Setup
6. Results and Discussion
6.1. Effect of Plate Structure on the Capacitive Fringe Effect
6.2. Characteristics of the Capacitive Sensor
7. Conclusions
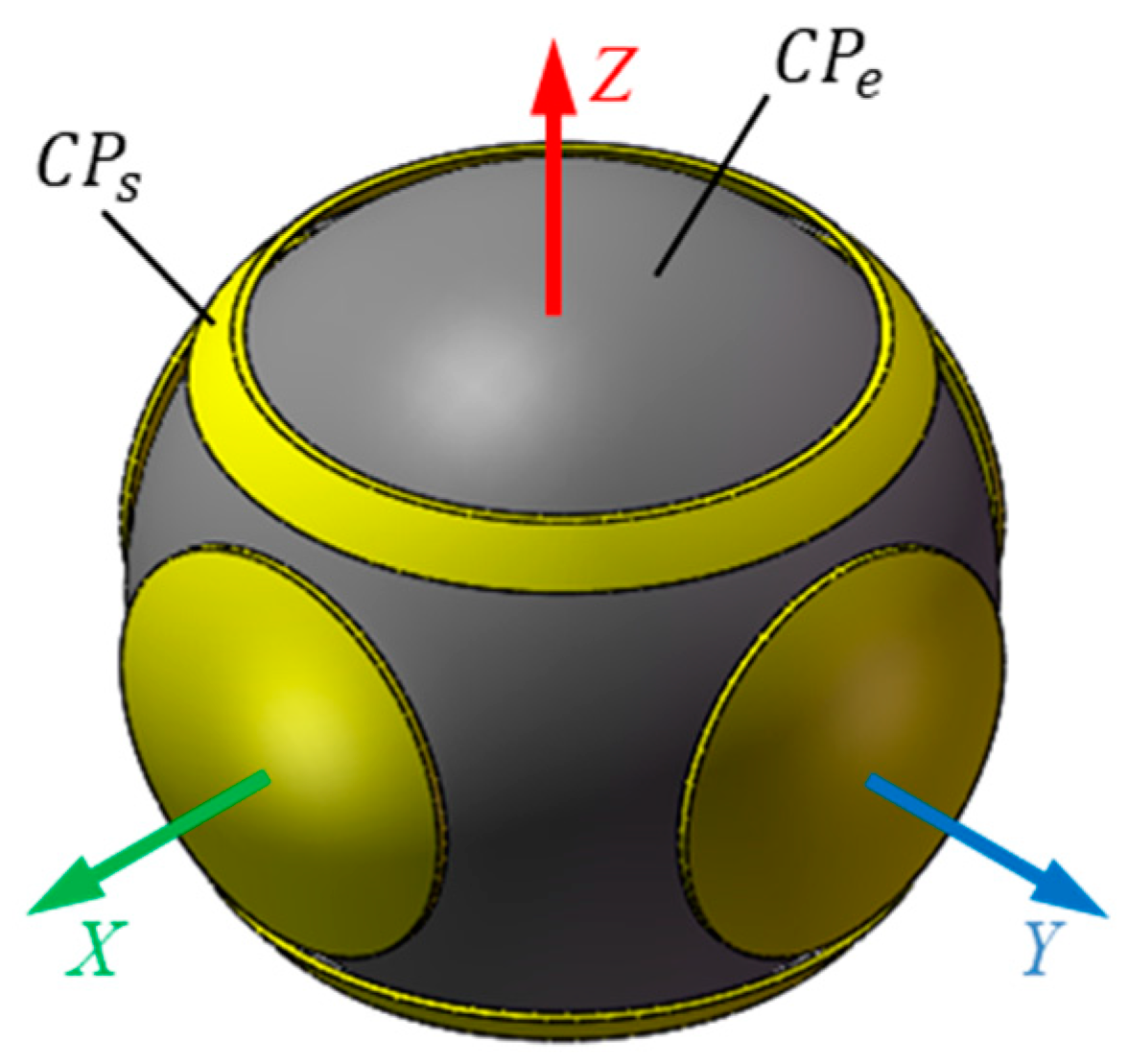
- The proposed capacitive sensor consists of a ball and six spherical-cap plates. The ball is used as a common excitation plate while six spherical-cap plates are deployed as sensing plates. Each sensing plate and the excitation plate produce a capacitor and every two capacitors with a symmetric distribution form a capacitor pair. The eccentric displacement of the ball can be obtained by detecting the differential capacitances of three capacitor pairs.
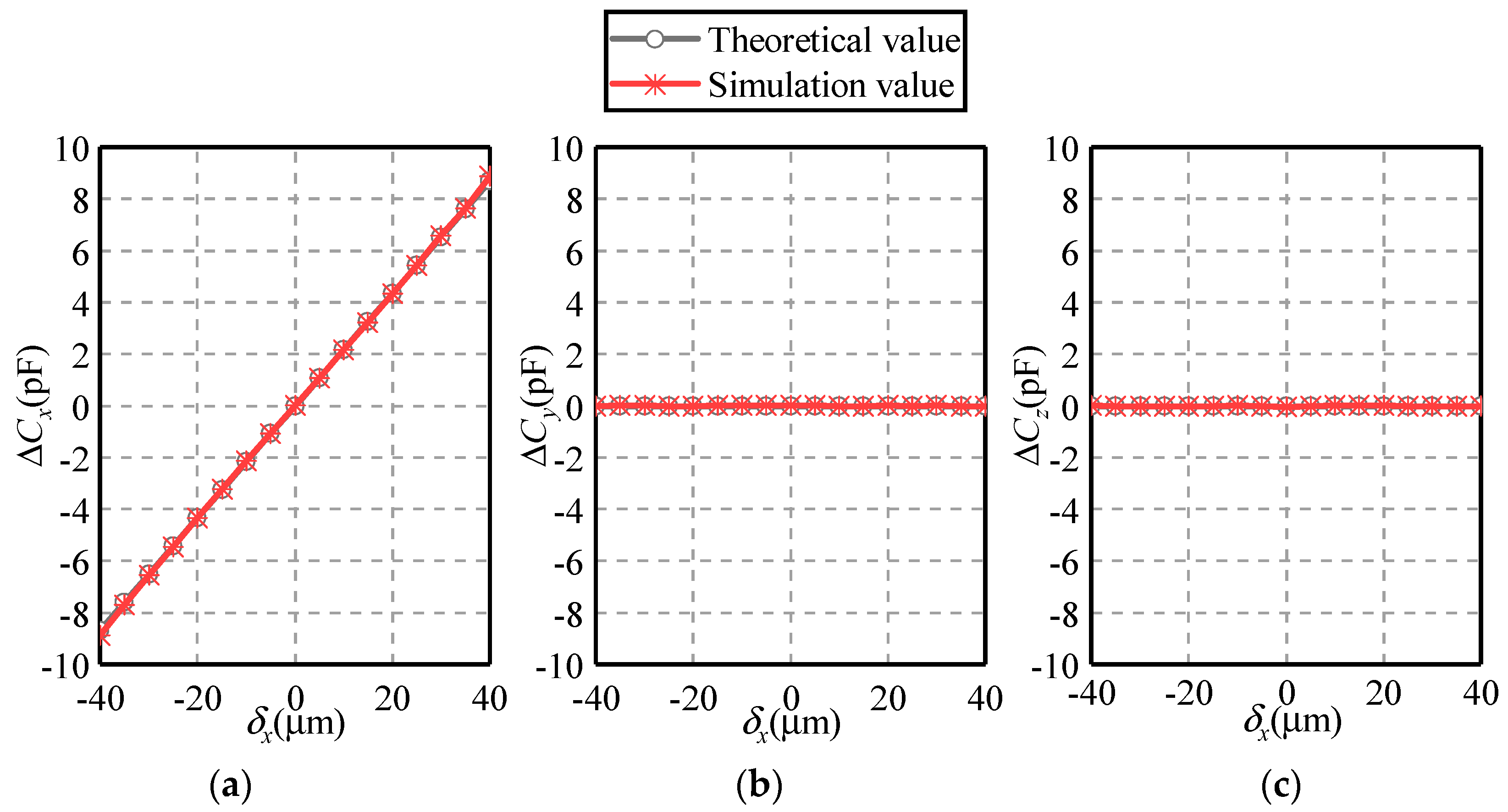
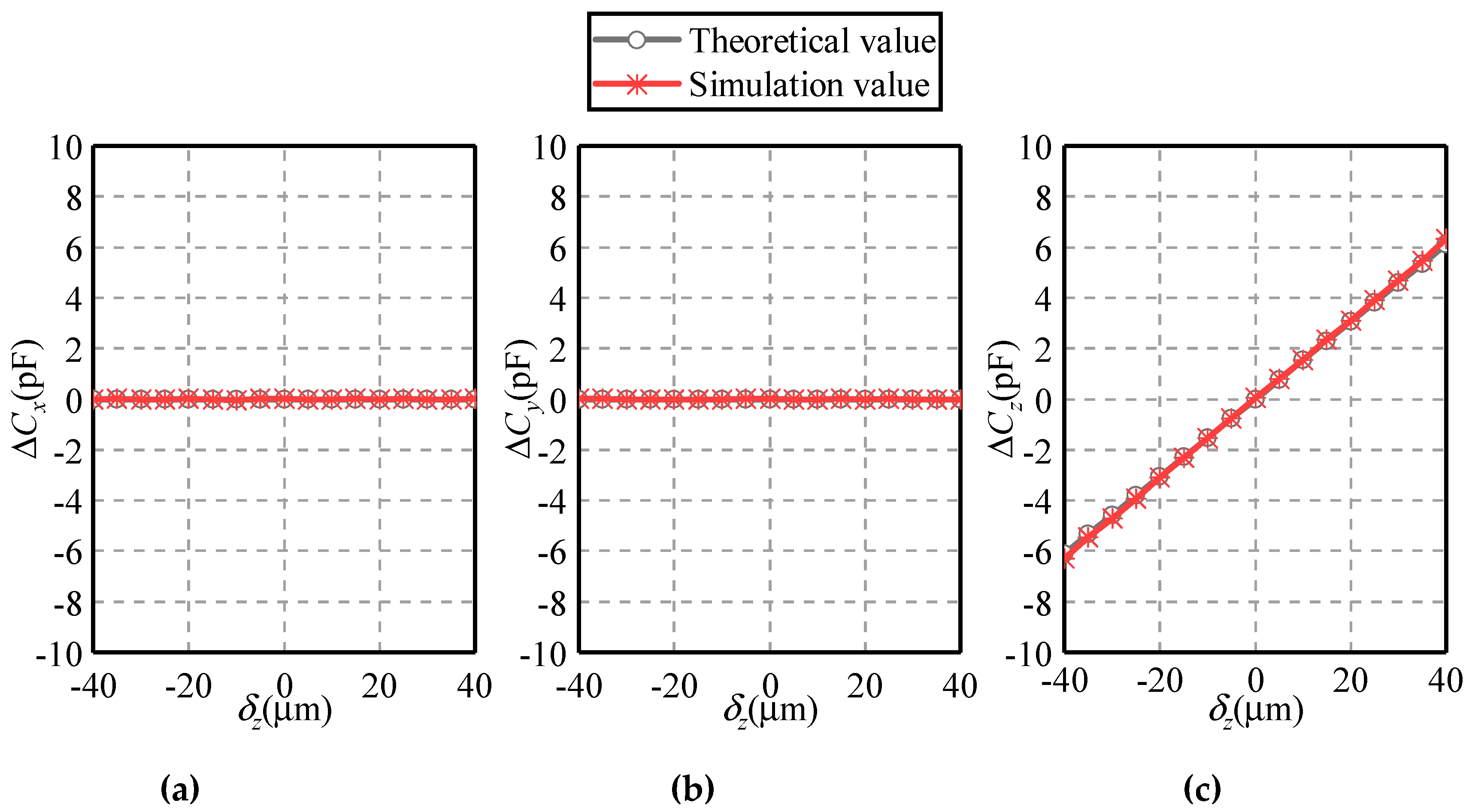
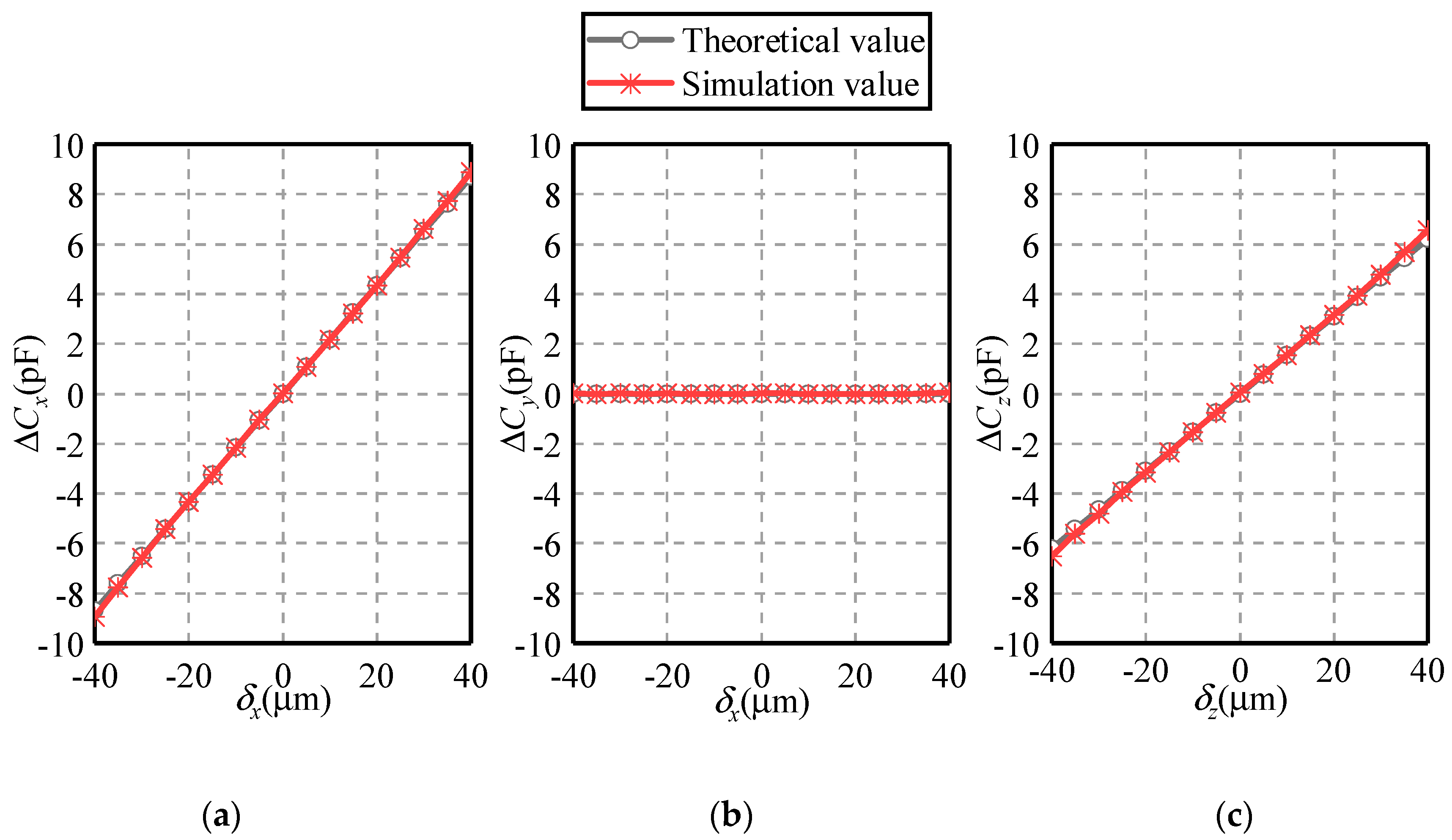
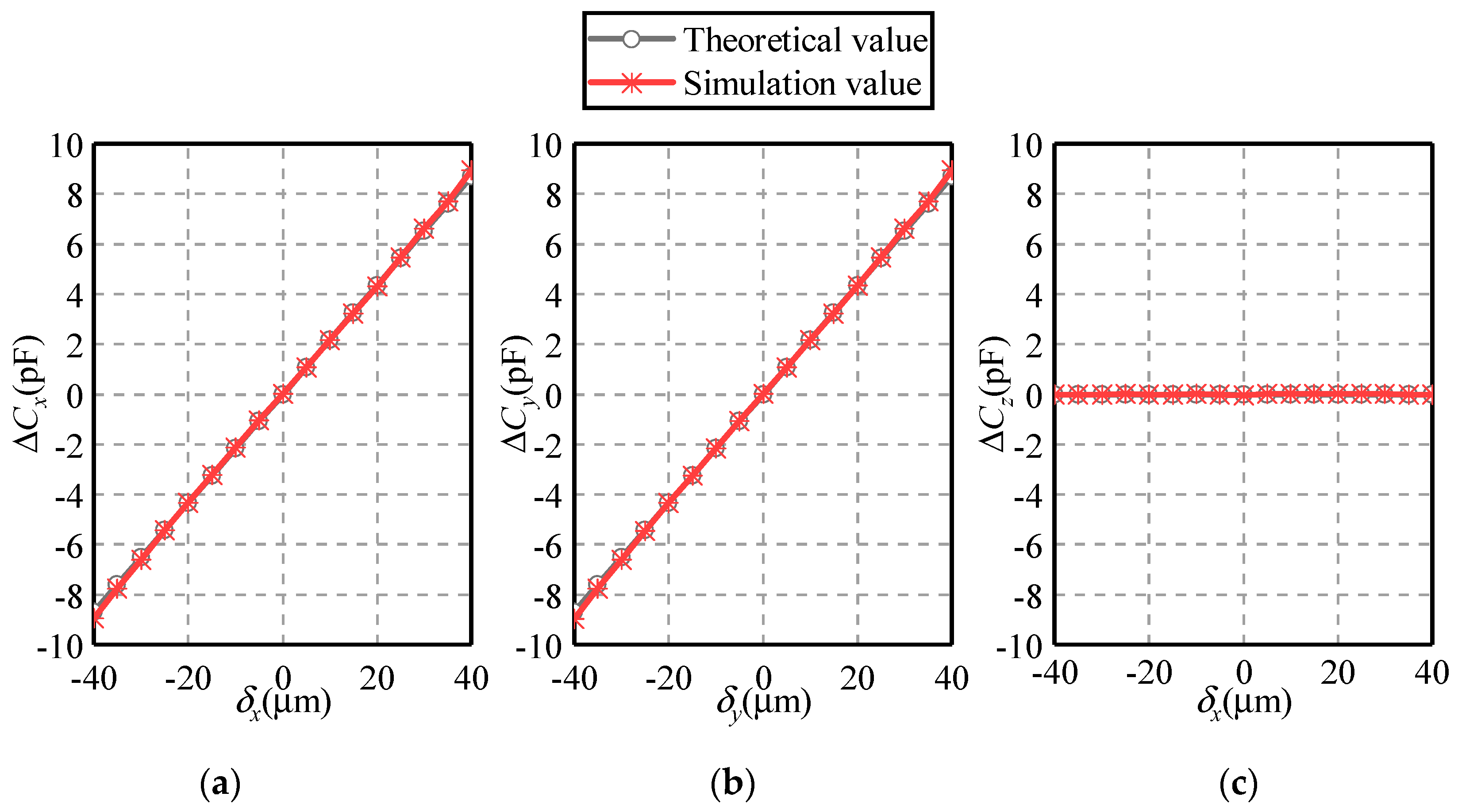
- The mathematical model of the eccentric displacements and the differential capacitances is derived. The nonlinear errors caused by the high-order terms is of 0.88% and 3.62% at the eccentricity of the ball ρ = 0.1 and ρ = 0.2, respectively. Thus, the relation between the differential capacitances (ΔCx, ΔCy and ΔCz) and the eccentric displacements (δx, δy and δz) can be described by linear function, provided that the eccentricity of the ball is less than 0.2.
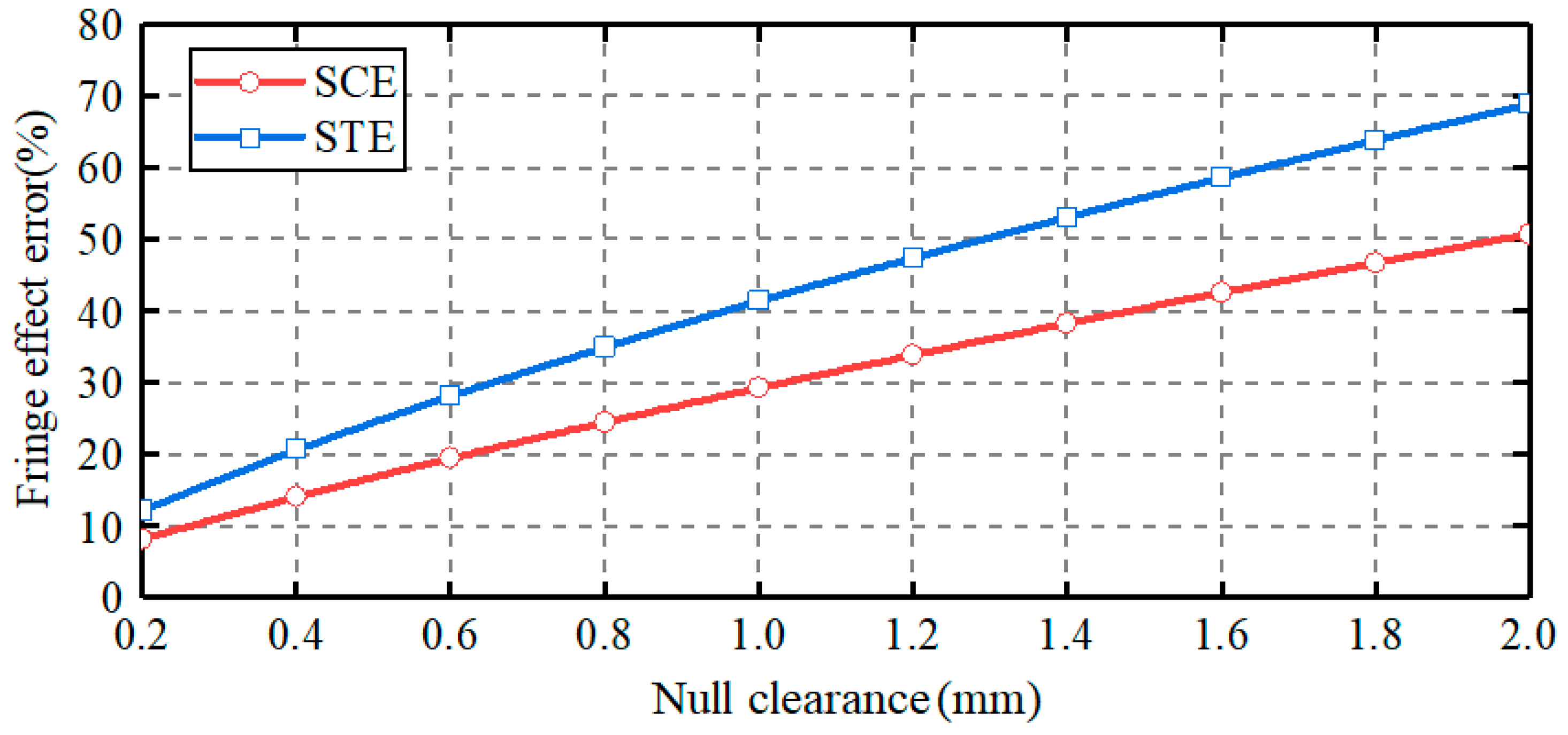
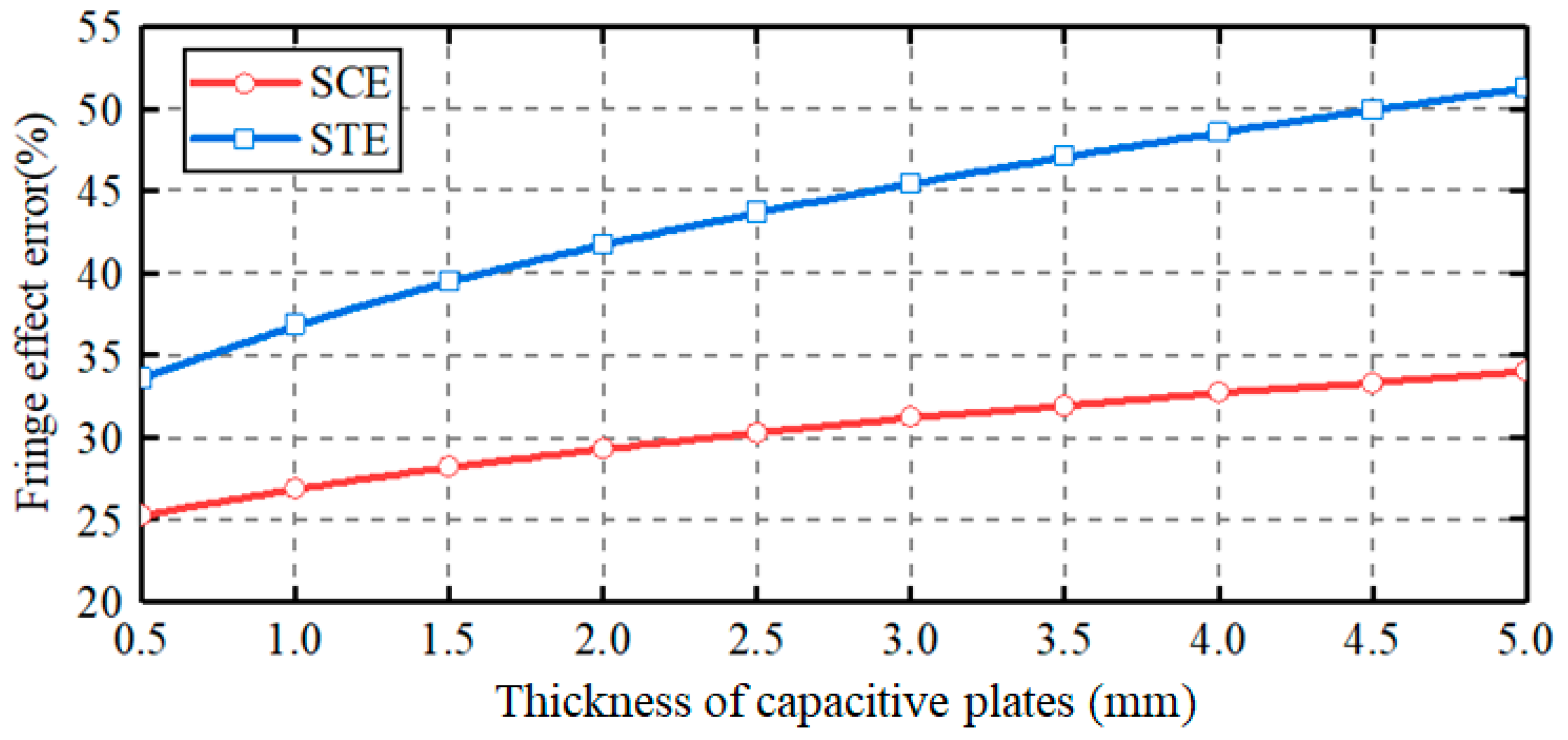
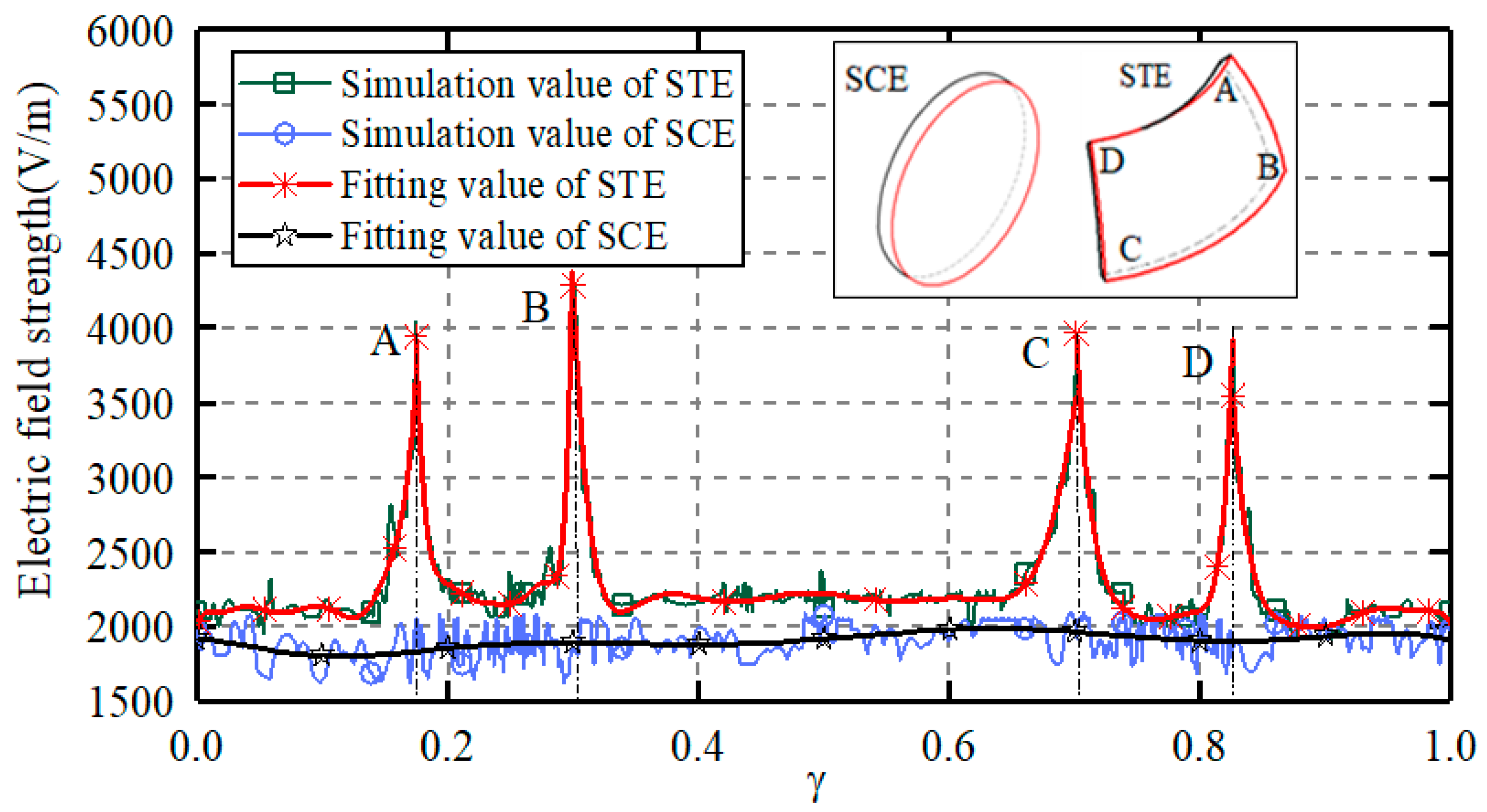
- The capacitance errors caused by the capacitive fringe effect are examined. The capacitive fringe effect could be reduced by reducing the null clearance and plate thickness. In addition, the capacitance error for spherical-cap plate is smaller than that for spherically-trapezoid plate. This indicates that the spherical-cap plate proposed in this work could contribute to the reduction of the capacitive fringe effect, in comparison with the spherically-trapezoid plate.
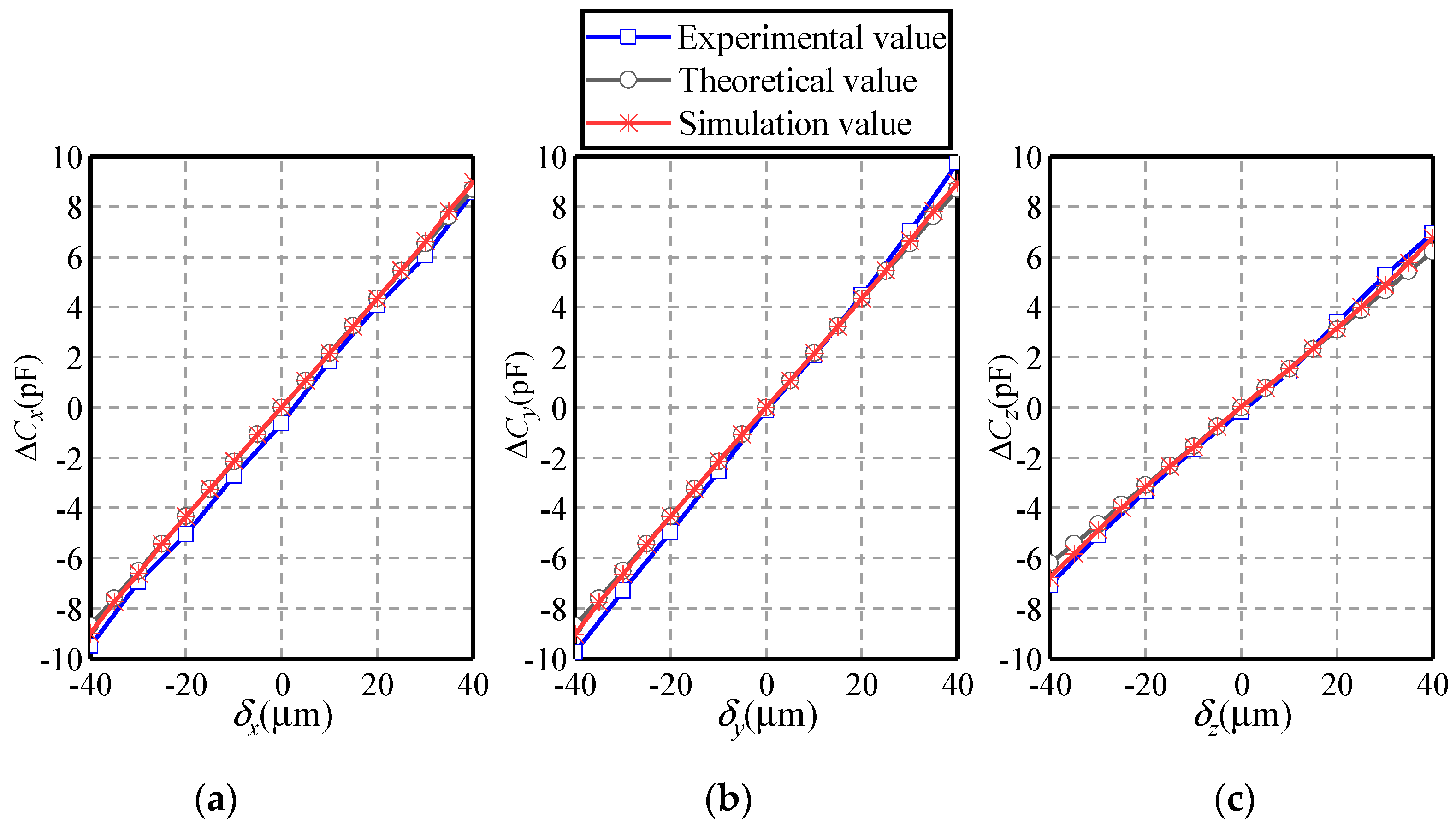
- The simulated and experimental values of the differential capacitance agree well with the theoretical counterparts, exhibiting a linear relation between the eccentric displacement and the differential capacitance. This indicates the feasibility and effectivity of the proposed capacitive sensor.
Author Contributions
Funding
Conflicts of Interest
References
- Robertson, A.P.; Slocum, A.H. Measurement and characterization of precision spherical joints. Precis. Eng. 2006, 30, 1–12. [Google Scholar] [CrossRef]
- Tian, Q.; Flores, P.; Lankarani, H.M. A comprehensive survey of the analytical, numerical and experimental methodologies for dynamics of multibody mechanical systems with clearance or imperfect joints. Mech. Mach. Theory 2018, 122, 1–57. [Google Scholar] [CrossRef]
- Erkaya, S. Clearance-induced vibration responses of mechanical systems: Computational and experimental investigations. J. Braz. Soc. Mech. Sci. Eng. 2018, 40, 90. [Google Scholar] [CrossRef]
- Flores, P.; Ambrosio, J.; Claro, J.C.; Lankarani, H.M. Dynamics of multibody systems with spherical clearance joints. J. Comput. Nonlinear Dyn. 2006, 1, 240–247. [Google Scholar] [CrossRef]
- Erkaya, S. Effects of Joint Clearance on the Motion Accuracy of Robotic Manipulators. J. Mech. Eng. 2018, 64, 82–94. [Google Scholar]
- Erkaya, S. Experimental investigation of flexible connection and clearance joint effects on the vibration responses of mechanisms. Mech. Mach. Theory 2018, 121, 515–529. [Google Scholar] [CrossRef]
- Flores, P.; Lankarani, H.M. Spatial rigid-multibody systems with lubricated spherical clearance joints: Modeling and simulation. Nonlinear Dyn. 2010, 60, 99–114. [Google Scholar] [CrossRef]
- Chen, X.L.; Gao, W.H.; Deng, Y.; Wang, Q. Chaotic characteristic analysis of spatial parallel mechanism with clearance in spherical joint. Nonlinear Dyn. 2018, 94, 2625–2642. [Google Scholar] [CrossRef]
- Varedi-Koulaei, S.M.; Daniali, H.M.; Farajtabar, M.; Fathi, B.; Shafiee-Ashtiani, M. Reducing the undesirable effects of joint clearance on the behavior of the planar 3-RRR parallel manipulators. Nonlinear Dyn. 2016, 86, 1007–1022. [Google Scholar] [CrossRef]
- Muvengei, O.; Kihiu, J.; Ikua, B. Dynamic analysis of planar rigid-body mechanical systems with two-clearance revolute joints. Nonlinear Dyn. 2013, 73, 259–273. [Google Scholar] [CrossRef]
- George, B.; Tan, Z.; Nihtianov, S. Advances in capacitive, eddy current, and magnetic displacement sensors and corresponding interfaces. IEEE Trans. Ind. Electron. 2017, 64, 9595–9607. [Google Scholar] [CrossRef]
- Han, Y.; Zhong, C.; Zhu, X.; Zhe, J. Online monitoring of dynamic tip clearance of turbine blades in high temperature environments. Meas. Sci. Technol. 2018, 29, 045102. [Google Scholar] [CrossRef]
- Lawson, C.P.; Ivey, P.C. Tubomachinery blade vibration amplitude measurement through tip timing with capacitance tip clearance probes. Sens. Actuators A Phys. 2005, 118, 14–24. [Google Scholar] [CrossRef]
- Zhang, J.K.; Wang, R.B.; Deng, Z.Y.; Kang, Y.H. A displacement sensing method based on alternating current magnetic flux measurement. Meas. Sci. Technol. 2018, 29, 085010. [Google Scholar] [CrossRef]
- Ripka, P.; Janosek, M. Advances in magnetic field sensors. IEEE Sens. J. 2010, 10, 1108–1116. [Google Scholar] [CrossRef]
- Podhraški, M.; Trontelj, J. A differential monolithically integrated inductive linear displacement measurement microsystem. Sensors 2016, 16, 384. [Google Scholar] [CrossRef]
- Tseng, V.F.; Xie, H. Resonant inductive coupling-based piston position sensing mechanism for large vertical displacement micromirrors. J. Microelectromec. Syst. 2016, 25, 207–216. [Google Scholar] [CrossRef]
- Nabavi, M.R.; Nihtianov, S.N. Design strategies for eddy-current displacement sensor systems: Review and recommendations. IEEE Sens. J. 2012, 12, 3346–3355. [Google Scholar] [CrossRef]
- Yamaguchi, T.; Ueda, M. An active sensor for monitoring bearing wear by means of an eddy current displacement sensor. Meas. Sci. Technol. 2007, 18, 311–317. [Google Scholar] [CrossRef]
- Ahn, H. A cylindrical capacitive sensor (CCS) for both radial and axial motion measurements. Meas. Sci. Technol. 2006, 17, 2027–2034. [Google Scholar] [CrossRef]
- Hu, P.H.; Lu, Y.C.; Chen, S.Y.; Hu, Y.; Zhu, L.Q. Measurement method of rotation angle and clearance in intelligent spherical hinge. Meas. Sci. Technol. 2018, 29, 64012. [Google Scholar] [CrossRef]
- Wang, W.; Yang, H.; Zhang, M.; Chen, Z.F.; Shi, G.; Lu, K.Q.; Xiang, K.; Ju, B.F. A novel method for the micro-clearance measurement of a precision spherical joint based on a spherical differential capacitive sensor. Sensors 2018, 18, 3366. [Google Scholar] [CrossRef]
- Wang, W.; Wen, Y.H.; Yu, J.P.; Chen, Z. Impact of fringe effect on measuring accuracy of planar capacitive sensors. Sens. Lett. 2011, 9, 1458–1461. [Google Scholar] [CrossRef]
- Wang, W.; Yang, H.; Zhang, M.; Chen, Z.F.; Shi, G.; Lu, K.Q.; Xiang, K.; Ju, B.F. A novel approach for detecting rotational angles of a precision spherical joint based on a capacitive sensor. Micromachines 2019, 10, 280. [Google Scholar] [CrossRef] [PubMed]
- Merlet, J.-P. Parallel Robots; Springer: Dordrecht, The Netherlands, 2002. [Google Scholar]















© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, W.; Qiu, W.; Yang, H.; Wu, H.; Shi, G.; Chen, Z.; Lu, K.; Xiang, K.; Ju, B. An Improved Capacitive Sensor for Detecting the Micro-Clearance of Spherical Joints. Sensors 2019, 19, 2694. https://doi.org/10.3390/s19122694
Wang W, Qiu W, Yang H, Wu H, Shi G, Chen Z, Lu K, Xiang K, Ju B. An Improved Capacitive Sensor for Detecting the Micro-Clearance of Spherical Joints. Sensors. 2019; 19(12):2694. https://doi.org/10.3390/s19122694
Chicago/Turabian StyleWang, Wen, Wenjun Qiu, He Yang, Haimei Wu, Guang Shi, Zhanfeng Chen, Keqing Lu, Kui Xiang, and Bingfeng Ju. 2019. "An Improved Capacitive Sensor for Detecting the Micro-Clearance of Spherical Joints" Sensors 19, no. 12: 2694. https://doi.org/10.3390/s19122694
APA StyleWang, W., Qiu, W., Yang, H., Wu, H., Shi, G., Chen, Z., Lu, K., Xiang, K., & Ju, B. (2019). An Improved Capacitive Sensor for Detecting the Micro-Clearance of Spherical Joints. Sensors, 19(12), 2694. https://doi.org/10.3390/s19122694