Ship Spatiotemporal Key Feature Point Online Extraction Based on AIS Multi-Sensor Data Using an Improved Sliding Window Algorithm


Abstract
:1. Introduction
- (a)
- (b)
- (c)
2. Feature Extraction Method
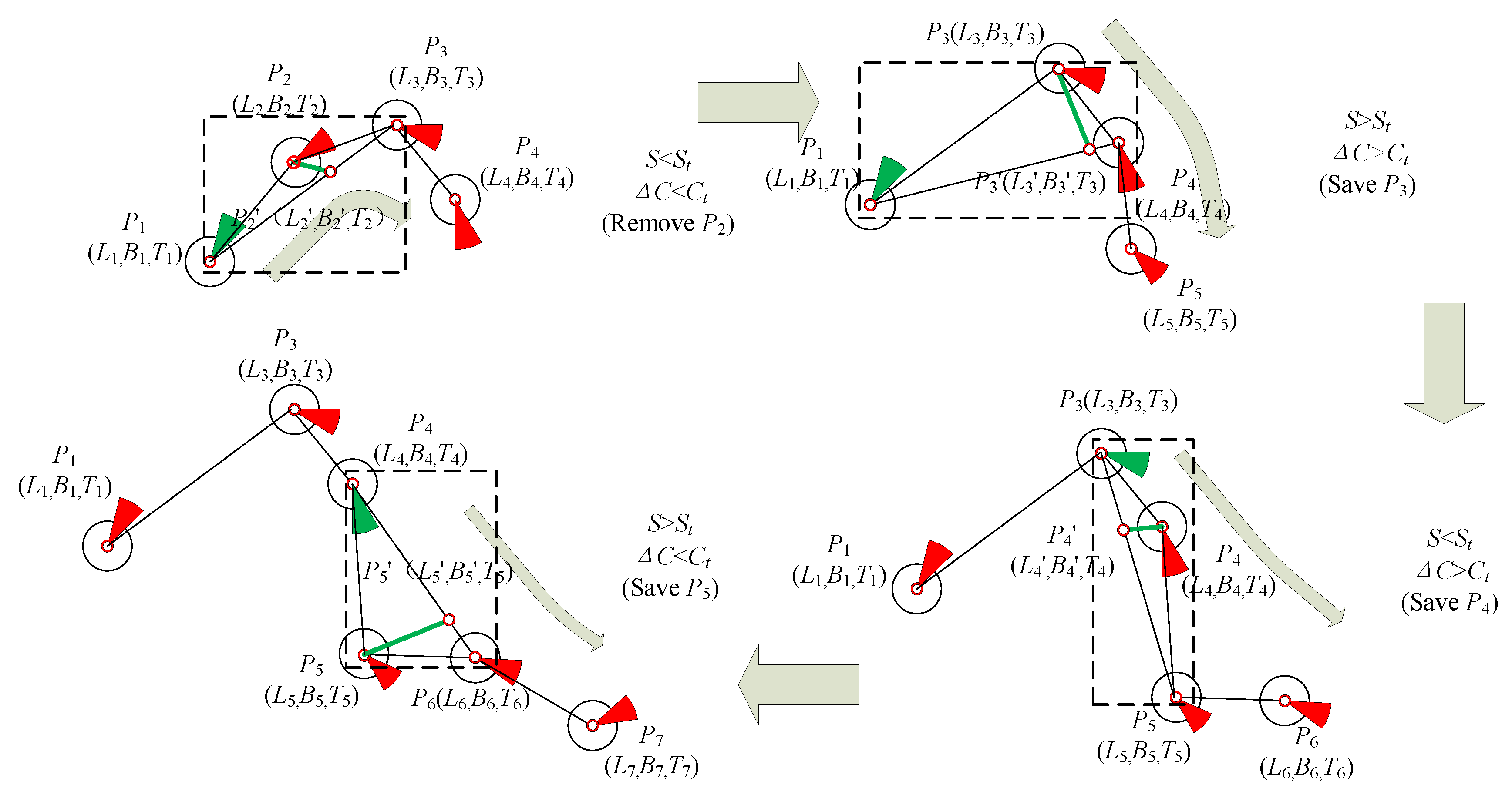
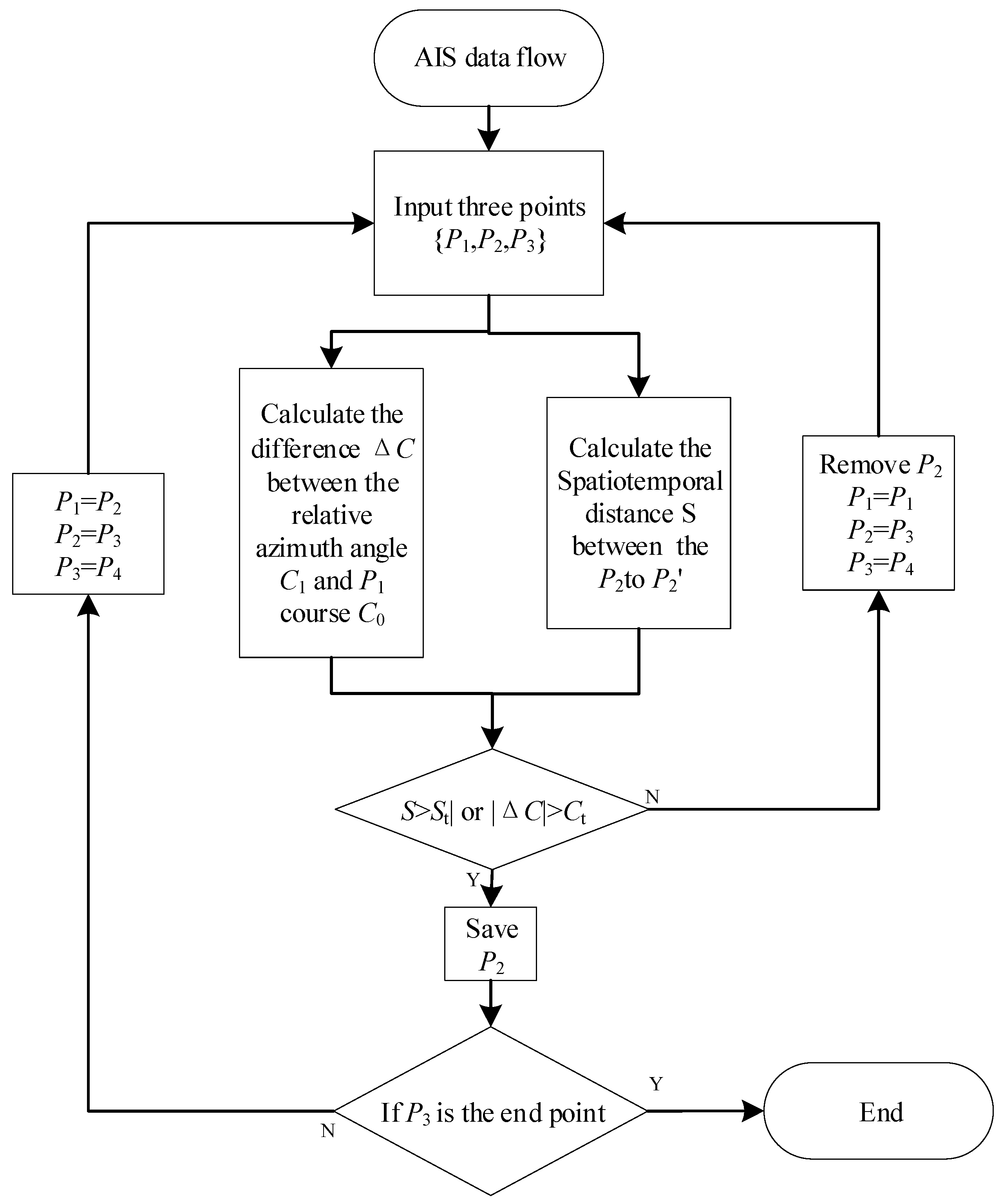
2.1. Improved Sliding Window Algorithm Based on Spatiotemporal Characteristics
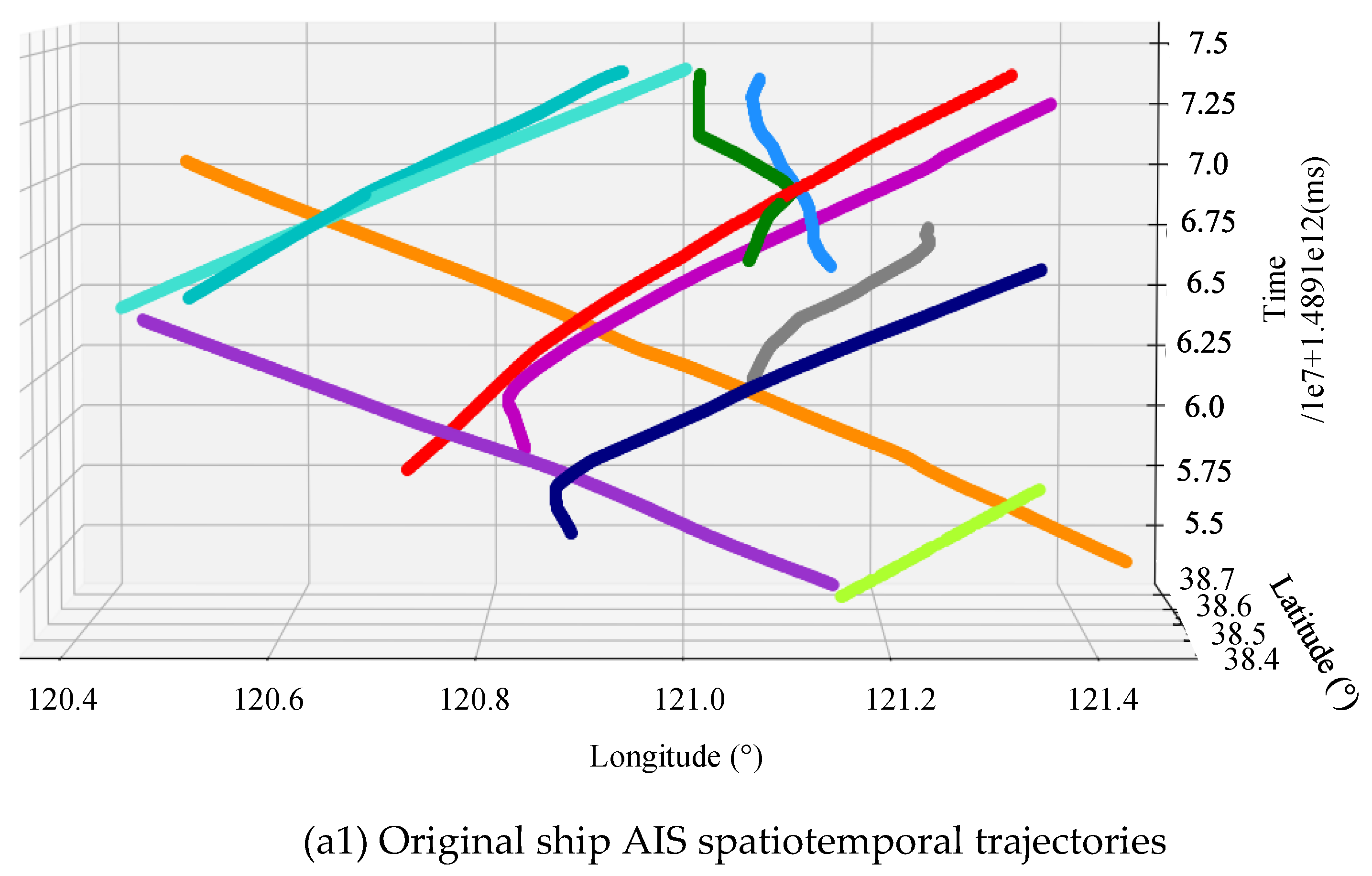
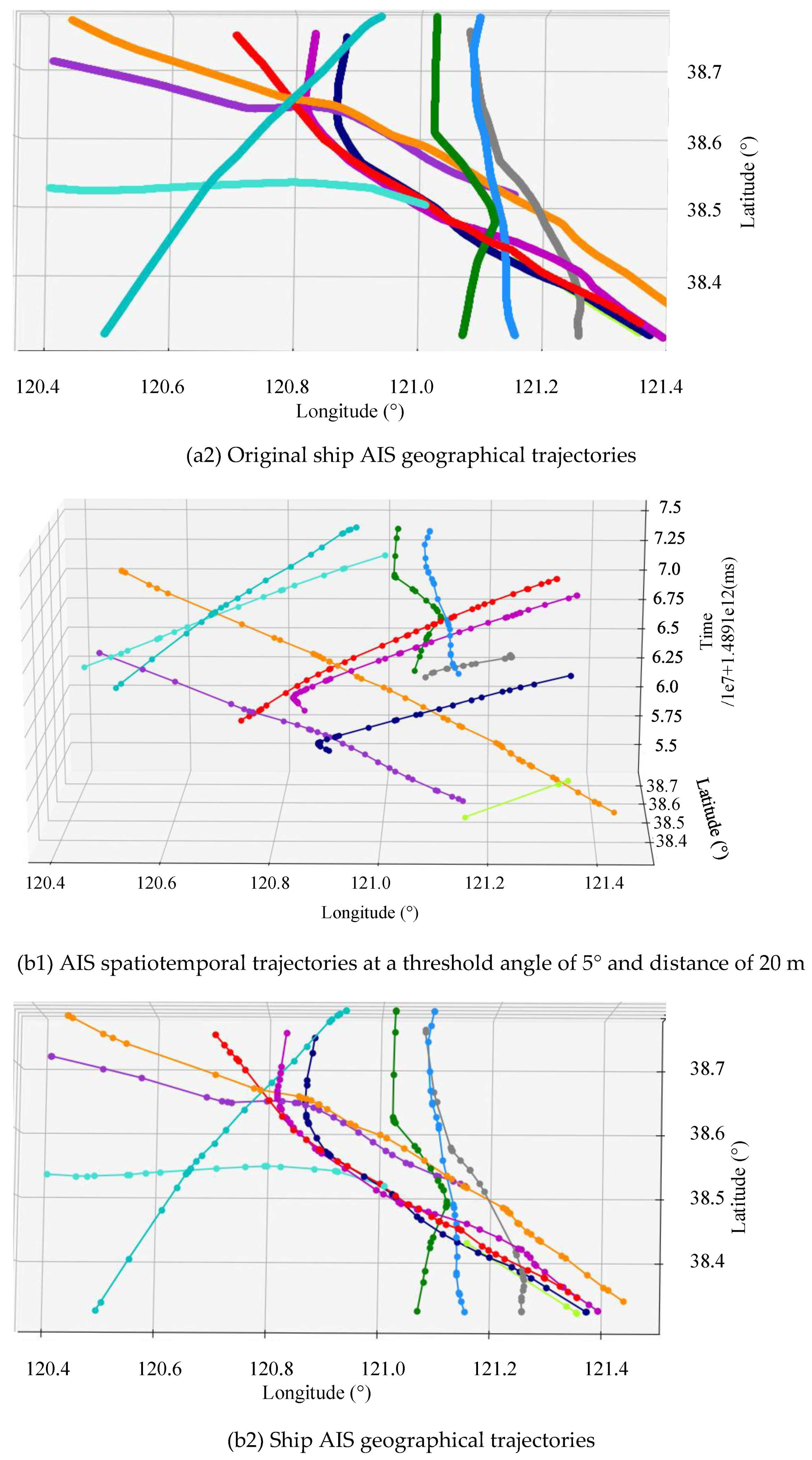
2.2. Feature Extraction Effect Verification
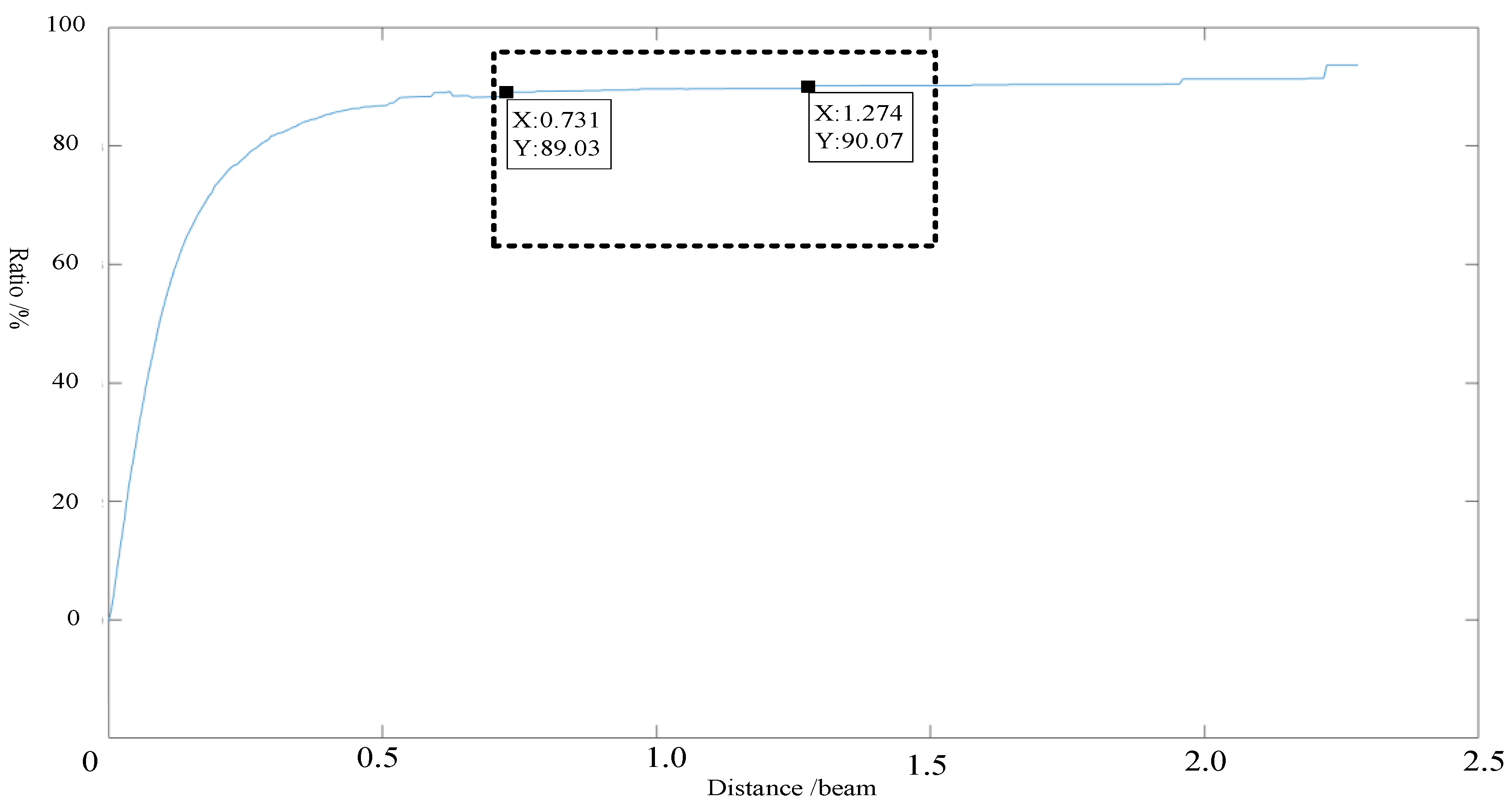
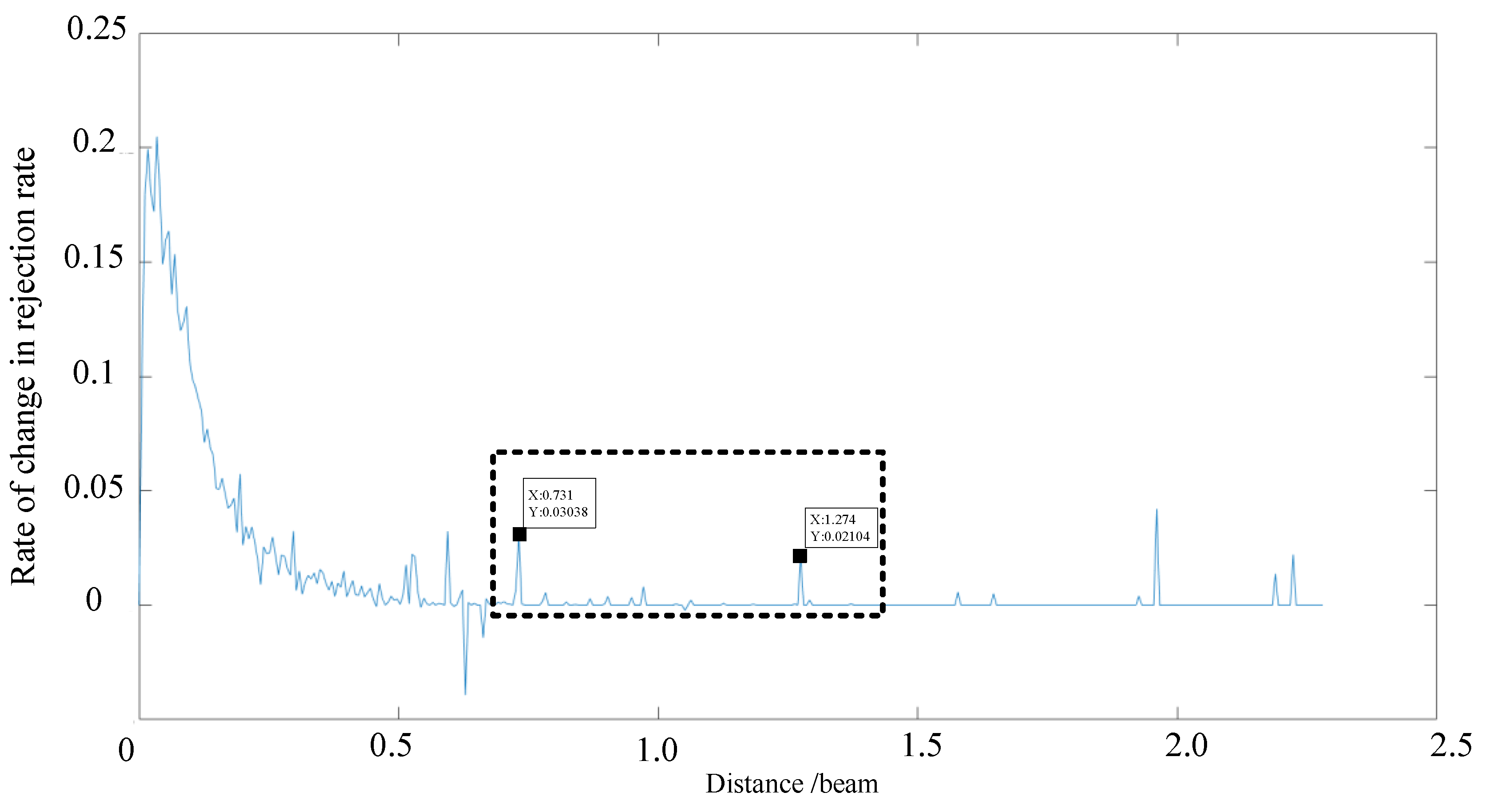
3. Feature Extraction Threshold Determination
4. Results and Discussion of KFP Extraction Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Mou, J.M.; Cees, V.D.T.; Ligteringen, H. Study on collision avoidance in busy waterways by using AIS data. Ocean Eng. 2010, 37, 483–490. [Google Scholar] [CrossRef]
- Wu, X.; Mehta, A.L.; Zaloom, V.A.; Craig, B.N. Analysis of waterway transportation in southeast Texas waterway based on AIS data. Ocean Eng. 2016, 121, 196–209. [Google Scholar] [CrossRef]
- Osborne, M.J.; Pepper, J. Creating Marine Spatial Data Infrastructure for the UK. In Coastal and Marine Geospatial Technologies; Green, D.R., Ed.; Springer: Dordrecht, The Netherlands, 2010; Volume 13, pp. 51–55. [Google Scholar] [CrossRef]
- Pepper, J. Unlocking the marine data treasure chest. In Coastal and Marine Geospatial Technologies; Green, D.R., Ed.; Springer: Dordrecht, The Netherland, 2010; Volume 13, pp. 57–64. [Google Scholar] [CrossRef]
- Piotr, B. The Ship Movement Trajectory Prediction Algorithm Using Navigational Data Fusion. Sensors 2017, 17, 1432. [Google Scholar] [CrossRef]
- Gao, M.; Shi, G.Y.; Li, S. Online Prediction of Ship Behavior with Automatic Identification System Sensor Data Using Bidirectional Long Short-Term Memory Recurrent Neural Network. Sensors 2018, 18, 4211. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; Liu, J.; Liu, R.W.; Xiong, N.; Wu, K.; Kim, T.H. A Dimensionality Reduction-Based Multi-Step Clustering Method for Robust Vessel Trajectory Analysis. Sensors 2017, 17, 1792. [Google Scholar] [CrossRef]
- Sang, L.Z.; Wall, A.; Mao, Z.; Yan, X.P.; Wang, J. A novel method for restoring the trajectory of the inland waterway ship by using AIS data. Ocean Eng. 2015, 110, 183–194. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S.K.; Shi, G.Y.; Liu, Z.J.; Zhao, Z.W.; Wu, Z.L. Data-driven based automatic maritime routing from massive AIS trajectories in the face of disparity. Ocean Eng. 2018, 155, 240–250. [Google Scholar] [CrossRef]
- Zhu, F.X.; Maritime, D. Mining ship spatial trajectory patterns from AIS database for maritime surveillance. In Proceedings of the IEEE International Conference on Emergency Management & Management Sciences, Beijing, China, 8–10 August 2011. [Google Scholar] [CrossRef]
- De Vries, G.K.D.; Van Someren, M. Machine learning for vessel trajectories using compression, alignments and domain knowledge. Expert Syst. Appl. 2012, 39, 13426–13439. [Google Scholar] [CrossRef]
- Takahashi, Y.; Karungaru, S.; Fukumi, M.; Akamatsu, N. Feature Point Extraction in Face Image by Neural Network. In Proceedings of the International Joint International on SICE-ICASE, Busan, Korea, 18–21 October 2006. [Google Scholar] [CrossRef]
- Chen, Z.; Jiang, J.; Jiang, X.; Cai, Z. Spectral-Spatial Feature Extraction of Hyperspectral Images Based on Propagation Filter. Sensors 2018, 18, 1978. [Google Scholar] [CrossRef]
- Kim, S.K.; Park, Y.J.; Toh, K.A.; Lee, S. SVM-based feature extraction for face recognition. Pattern Recognit. 2010, 43, 2871–2881. [Google Scholar] [CrossRef]
- Weber, C.; Hahmann, S.; Hagen, H. Sharp Feature Detection in Point Clouds. In Proceedings of the Shape Modeling International Conference, Aix-en-Provence, France, 21–23 June 2010; IEEE Computer Society: Washington, DC, USA, 2010. [Google Scholar] [CrossRef]
- Park, M.K.; Lee, S.J.; Lee, K.H. Multi-scale tensor voting for feature extraction from unstructured point clouds. Graph. Models 2012, 74, 197–218. [Google Scholar] [CrossRef]
- Jun, J.; Ogle, J.; Guensler, R. Relationships Between Crash Involvement and Temporal-Spatial Driving Behavior Activity Patterns: Use of Data for Vehicles with Global Positioning Systems. Transp. Res. Rec. 2007, 2019, 246–255. [Google Scholar] [CrossRef]
- Castro, D.; Nunes, U.; Ruano, A. Feature Extraction for Moving Objects Tracking System in Indoor Environments. Proc. Ifac/Euron Symp. Intell. Auton. Veh. 2004, 37, 5–7. [Google Scholar] [CrossRef]
- Jiang, S.; Wang, D.; Qu, Z.; Hu, H. Extraction and Calibration of Trajectory Characteristics of vehicles at Intersections. J. Southwest Jiaotong Univ. 2012, 47, 784–789. [Google Scholar] [CrossRef]
- Wang, W.; Ji, Y.; Lin, X. A novel fusion-based ship detection method from, Pol-SAR images. Sensors 2015, 15, 25072–25089. [Google Scholar] [CrossRef] [PubMed]
- Tu, W.; Zhong, S.; Incecik, A.; Fu, X. Defect feature extraction of marine protective coatings by terahertz pulsed imaging. Ocean Eng. 2018, 155, 382–391. [Google Scholar] [CrossRef] [Green Version]
- Mi, J.; Huang, J. Flow Monitoring Method Based on Quantitative Recursive Feature Extraction. J. Xinyang Norm. Univ. (Nat. Sci. Ed.) 2016, 29, 456–460. [Google Scholar] [CrossRef]
- Stefani, F.D.; Bottalico, S.; Pinizzotto, A. 1997. In Proceedings of the Ship Feature Extraction from Maritime Radar Data, Edinburgh, UK, 14–16 October 1997. [Google Scholar] [CrossRef]
- Wang, X.; Zeng, Y. Study on Vehicles Travel Path Extraction Based on Close Range Photogrammetry. Sci. Technol. Eng. 2012, 12, 5105–5108. (In Chinese) [Google Scholar] [CrossRef]
- Fu, P.; Wang, H.; Liu, K.; Hu, X.; Zhang, H. Finding Abnormal Vessel Trajectories Using Feature Learning. IEEE Access 2017, 5, 7898–7909. [Google Scholar] [CrossRef]
- Sheng, K.; Liu, Z.; Zhou, D.; He, A.; Feng, C. Research on ship classification based on trajectory features. J. Navig. 2018, 71, 17. [Google Scholar] [CrossRef]
- Li, Y.; Liu, R.W.; Liu, J.; Zhang, X.K.; Shi, G.Y.; Cai, Y. Trajectory compression-guided visualization of spatio-temporal AIS vessel density. In Proceedings of the International Conference on Wireless Communications & Signal Processing, Yangzhou, China, 13–15 October 2016. [Google Scholar] [CrossRef]
- Zhang, S.K.; Liu, Z.J.; Zhang, X.K.; Shi, G.Y.; Cai, Y. A method for AIS track data compression based on Douglas-Peucker algorithm. J. Harbin Eng. Univ. 2015, 5, 595–599. [Google Scholar] [CrossRef]
- Zhang, S.K.; Yang, J.X.; Cai, Y.; Shi, G.Y. A Method for Automatic Routing Based on AIS Tracks and Douglas-Peucker. J. Chongqing Jiaotong Univ. (Natural Science) 2014, 79–82, 117. (In Chinese) [Google Scholar] [CrossRef]
- Zhang, S.K.; Liu, Z.J.; Cai, Y.; Wu, Z.L.; Shi, G.Y. AIS Trajectories Simplification and Threshold Determination. J. Navig. 2016, 69, 729–744. [Google Scholar] [CrossRef]
- Zhao, L.B.; Shi, G.Y. A method for simplifying ship trajectory based on improved Douglas–Peucker algorithm. Ocean Eng. 2018, 166, 37–46. [Google Scholar] [CrossRef]
- Zhao, L.B.; Shi, G.Y. A trajectory clustering method based on Douglas-Peucker compression and density for marine traffic pattern recognition. Ocean Eng. 2019, 172, 456–467. [Google Scholar] [CrossRef]
- Mou, J.M.; Chen, P.F.; He, Y.X.; Zhang, X.J.; Zhu, J.F.; Rong, H. Fast self-tuning spectral clustering algorithm for AIS ship trajectory. J. Harbin Eng. Univ. 2018, 39, 428–432. [Google Scholar] [CrossRef]
- Ren, Y.; Yang, C.; Yu, Z.; Wang, P. A Way to Speed up Buffer Generalization by Douglas-Peucker Algorithm. In Proceedings of the IEEE International Geoscience & Remote Sensing Symposium, Anchorage, AK, USA, 20–24 September 2004. [Google Scholar] [CrossRef]
- Zhu, M.; Sun, J. GPS Trajectory Data Compression Algorithm Based on MBR. J. Xinyang Coll. Agric. For. 2016, 26, 117–120, 123. (In Chinese) [Google Scholar] [CrossRef]
- Dutta, S.; Bhattacherjee, S.; Narang, A. Towards “intelligent compression” in streams: A biased reservoir sampling based Bloom filter approach. In Proceedings of the 15th International Conference on Extending Database Technology, Berlin, Germany, 26–30 March 2011; pp. 228–238. [Google Scholar] [CrossRef]
- Yang, L.; Yang, G.; Yin, Y.; Xiao, R. Sliding window-based region of interest extraction for finger vein images. Sensors 2013, 13, 3799–3815. [Google Scholar] [CrossRef]
- Keogh, E.; Chu, S.; Pazzani, M. An online algorithm for segmenting time series. In Proceedings of the 2001 IEEE International Conference on Data Mining, San Jose, CA, USA, 29 November–2 December 2001; pp. 289–296. [Google Scholar] [CrossRef]
- Otsuka, K.; Horikoshi, T.; Suzuki, S.; Fujii, M. Feature extraction of temporal texture based on spatiotemporal motion trajectory. In Proceedings of the International Conference on Pattern Recognition. Computer Society, Brisbane, Queensland, Australia, 20 August 1998. [Google Scholar] [CrossRef]
- Cao, H.; Wolfson, O.; Trajcevski, G. Spatio-temporal data reduction with deterministic error bounds. VLDB J. 2006, 15, 211–228. [Google Scholar] [CrossRef]
- Satoh, Y.; Nakagawa, T.; Okatani, T.; Deguchi, K. A motion tracking by extracting 3D feature of moving objects with binocular cooperative fixation. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots & Systems, Lausanne, Switzerland, 30 September–4 October 2002. [Google Scholar] [CrossRef]
- Sandu, P.I.; Zeitouni, K.; Oria, V.; Kharrat, A. Spatio-temporal compression of trajectories in road networks. GeoInformatica 2015, 19, 117–145. [Google Scholar] [CrossRef]
- Xiu, S.; Wen, Y.Q.; Yuan, H.W.; Xiao, C.S.; Zhan, W.Q.; Zou, X.; Zhou, C.H.; Sayed, C.S. A Multi-Feature and Multi-Level Matching Algorithm Using Aerial Image and AIS for Vessel Identification. Sensors 2019, 19, 1317. [Google Scholar] [CrossRef] [PubMed]
- Hershkovits, Y.; Ziv, J. On sliding-window universal data compression with limited memory. IEEE Trans. Inf. Theory 2002, 44, 66–78. [Google Scholar] [CrossRef]
- Chou, J.S.; Ngo, N.T. Time series analytics using sliding window metaheuristic optimization-based machine learning system for identifying building energy consumption patterns. Appl. Energy 2016, 177, 751–770. [Google Scholar] [CrossRef]
- Serfozo, R. Basics of Applied Stochastic Processes; Springer Science & Business Media: Berlin, Gemany, 2009; pp. 1–99, 241–242. [Google Scholar] [CrossRef]
- Wang, J.; Zhu, C.; Zhou, Y.; Zhang, W. Vessel Spatio-Temporal Knowledge Discovery with AIS Trajectories Using Co-Clustering. J. Navig. 2017, 70, 18. [Google Scholar] [CrossRef]
- Fuji, J.; Tanaka, K. Traffic Capacity. J. Navig. 1971, 24, 543–552. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DP Algorithm | Improved Sliding Window Algorithm (For Angle Threshold of 4.5°) | |||
|---|---|---|---|---|
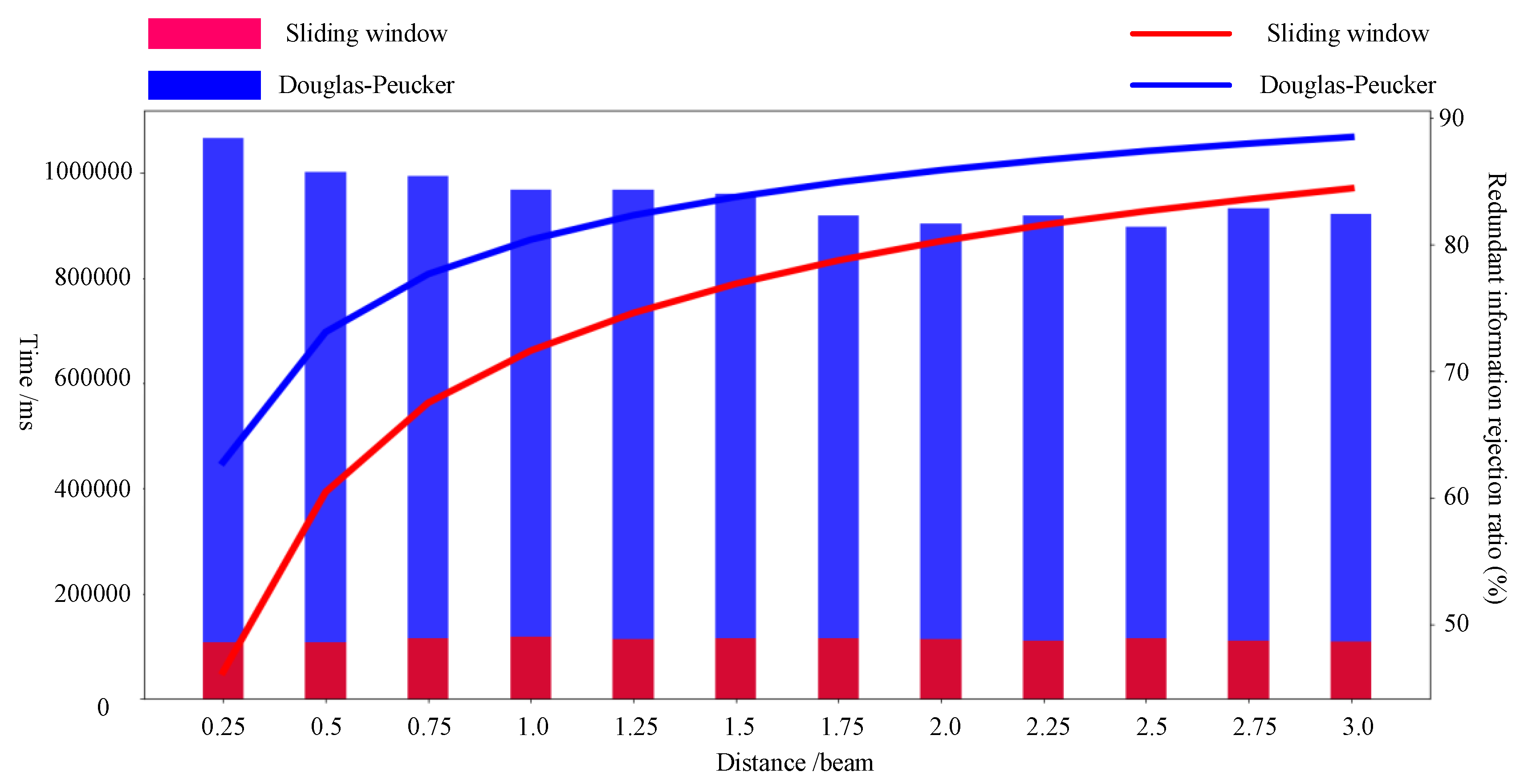
| Distance Threshold (/beam) | Time (ms) | Redundant Information Rejection Ratio (%) | Time (ms) | Redundant Information Rejection Ratio (%) |
| 0.25 | 1,065,880 | 62.8326 | 106,738 | 46.2627 |
| 0.5 | 1,001,909 | 73.1039 | 107,405 | 60.4662 |
| 0.75 | 993,541 | 77.6836 | 115,015 | 67.5149 |
| 1 | 968,285 | 80.4005 | 117,772 | 71.6335 |
| 1.25 | 967,549 | 82.3278 | 114,028 | 74.6086 |
| 1.5 | 960,610 | 83.7742 | 114,211 | 76.9160 |
| 1.75 | 919,216 | 84.9347 | 114,143 | 78.7610 |
| 2 | 903,670 | 85.8901 | 113,539 | 80.2842 |
| 2.25 | 918,580 | 86.6922 | 110,629 | 81.5669 |
| 2.5 | 897,767 | 87.3986 | 114,095 | 82.6549 |
| 2.75 | 932,628 | 87.9897 | 110,449 | 83.5983 |
| 3 | 921,720 | 88.5085 | 108,568 | 84.4530 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, M.; Shi, G.-Y. Ship Spatiotemporal Key Feature Point Online Extraction Based on AIS Multi-Sensor Data Using an Improved Sliding Window Algorithm. Sensors 2019, 19, 2706. https://doi.org/10.3390/s19122706
Gao M, Shi G-Y. Ship Spatiotemporal Key Feature Point Online Extraction Based on AIS Multi-Sensor Data Using an Improved Sliding Window Algorithm. Sensors. 2019; 19(12):2706. https://doi.org/10.3390/s19122706
Chicago/Turabian StyleGao, Miao, and Guo-You Shi. 2019. "Ship Spatiotemporal Key Feature Point Online Extraction Based on AIS Multi-Sensor Data Using an Improved Sliding Window Algorithm" Sensors 19, no. 12: 2706. https://doi.org/10.3390/s19122706
APA StyleGao, M., & Shi, G. -Y. (2019). Ship Spatiotemporal Key Feature Point Online Extraction Based on AIS Multi-Sensor Data Using an Improved Sliding Window Algorithm. Sensors, 19(12), 2706. https://doi.org/10.3390/s19122706