A Robust, Non-Cooperative Localization Algorithm in the Presence of Outlier Measurements in Ocean Sensor Networks



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
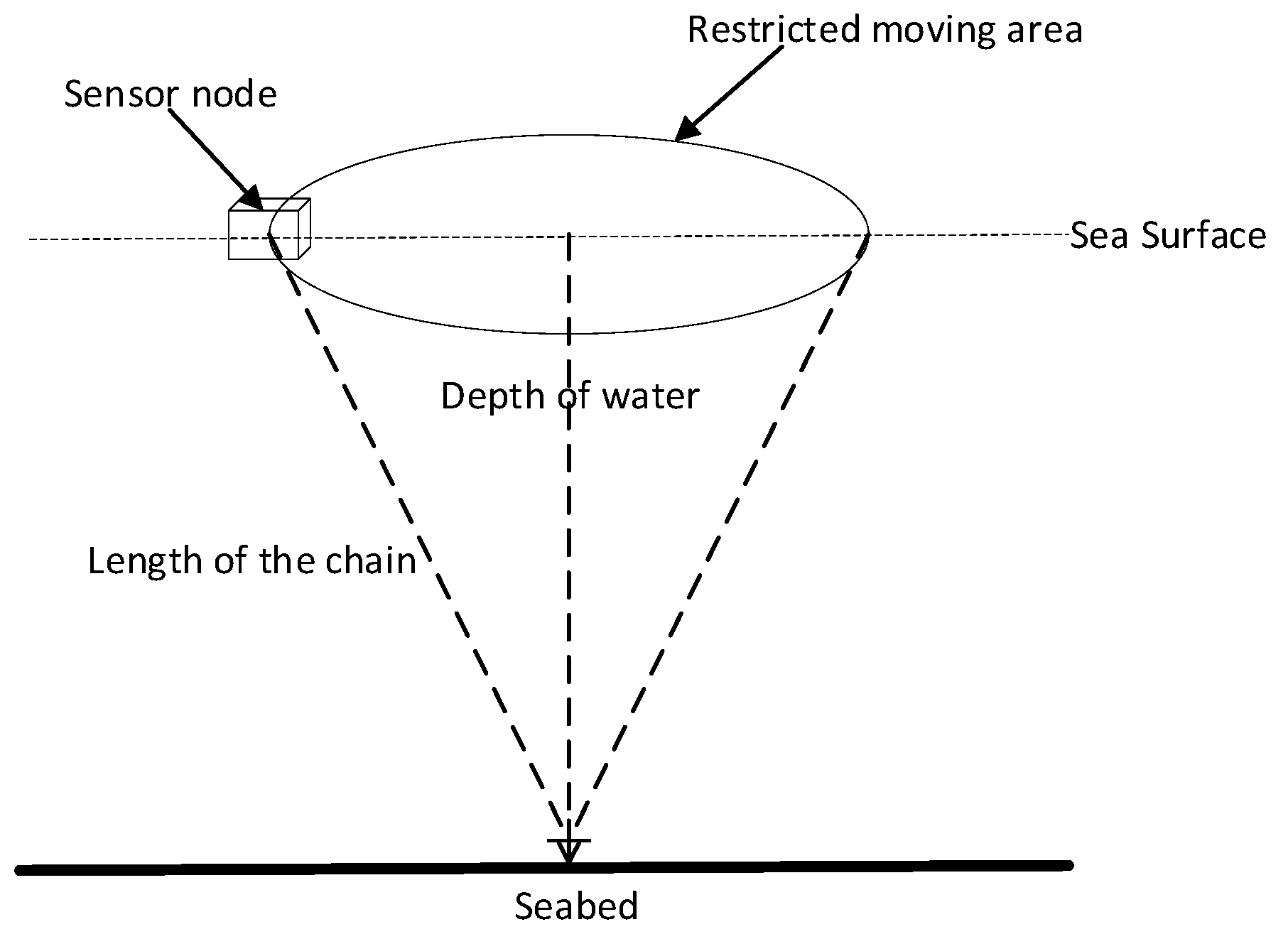
2. Problem Formulation
3. Proposed Algorithm
3.1. Generalized Trust Region Subproblem (GTRS)
3.2. German-McClure (GM) Function with Huber Norm in GTRS
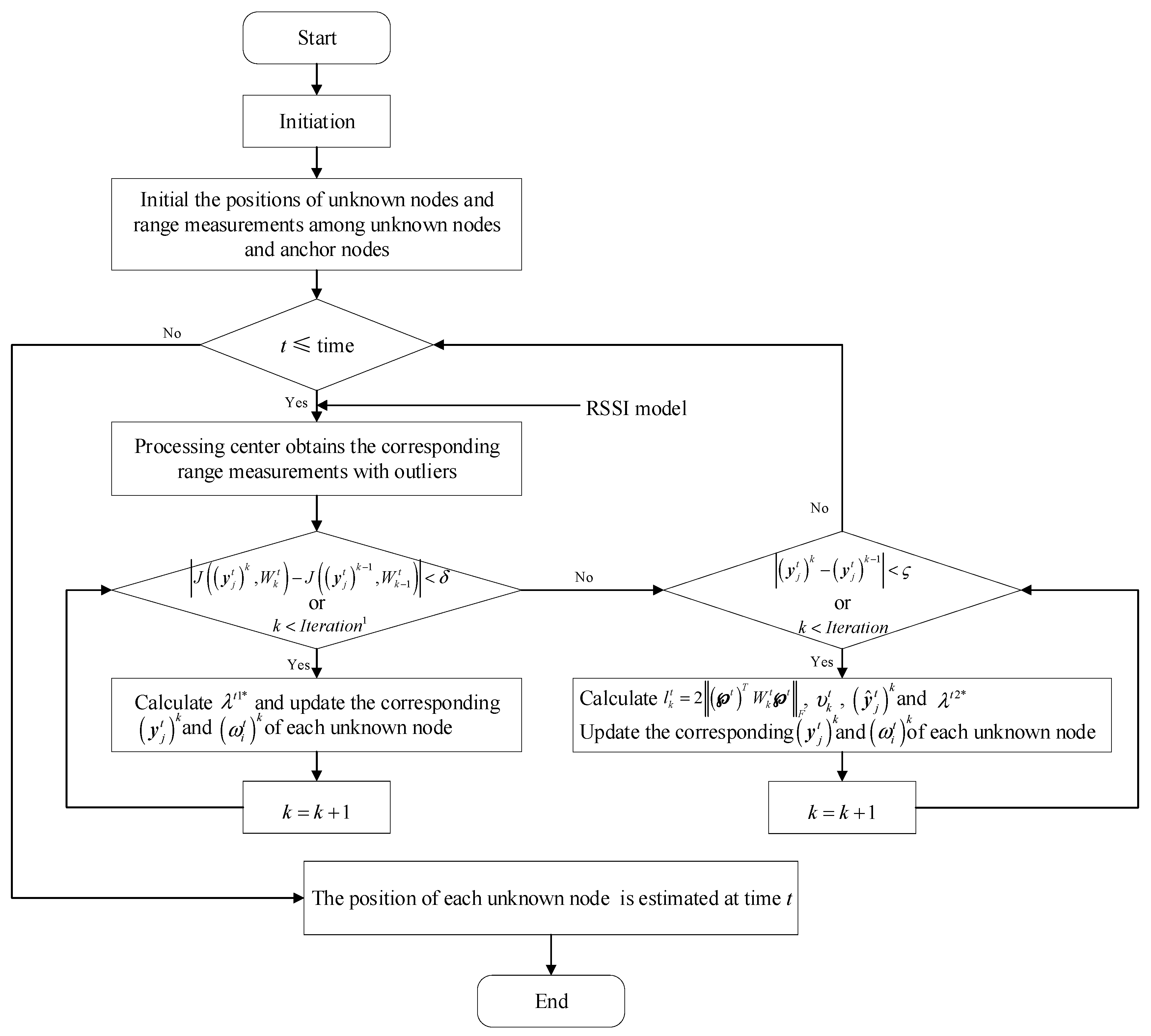
3.3. Robust, Non-Cooperative Localization Algorithm (RNLA)
| Algorithm 1. Algorithm for RNLA |
| 1. Initiation: , , maximum number of iterations , the convergence tolerance and , and |
| 2. Calculate the range measurement matrix |
| 3. for do |
| 4. for do |
| 5. for do |
| 6. Calculate , , , and according to Equation (11) |
| 7. end |
| 8. Let and |
| 9. while STOP = FALSE do |
| 10. Solve Equation (19) with Equation (20) using the bisection approach to figure out . |
| 11. Update according to Equation (20) |
| 12. Update according to Equation (17) |
| 13. if or reach the number of then |
| 14. STOP←True |
| 15. else |
| 16. end |
| 17. Let , |
| 18. while STOP = FALSE do |
| 19. Calculate |
| 20. Calculate and according to Equations (23) and (24) |
| 21. Figure out according to Equation (26) |
| 22. Update according to Equation (25) |
| 23. Update according to Equation (17) |
| 24. if or reach the number of then |
| 25. STOP←True |
| 26. else |
| 27. end |
| 28. end |
| 29. end |
3.4. Cramer–Rao Low Bound (CRLB)
3.5. Complexity Analysis
4. Numerical Simulations
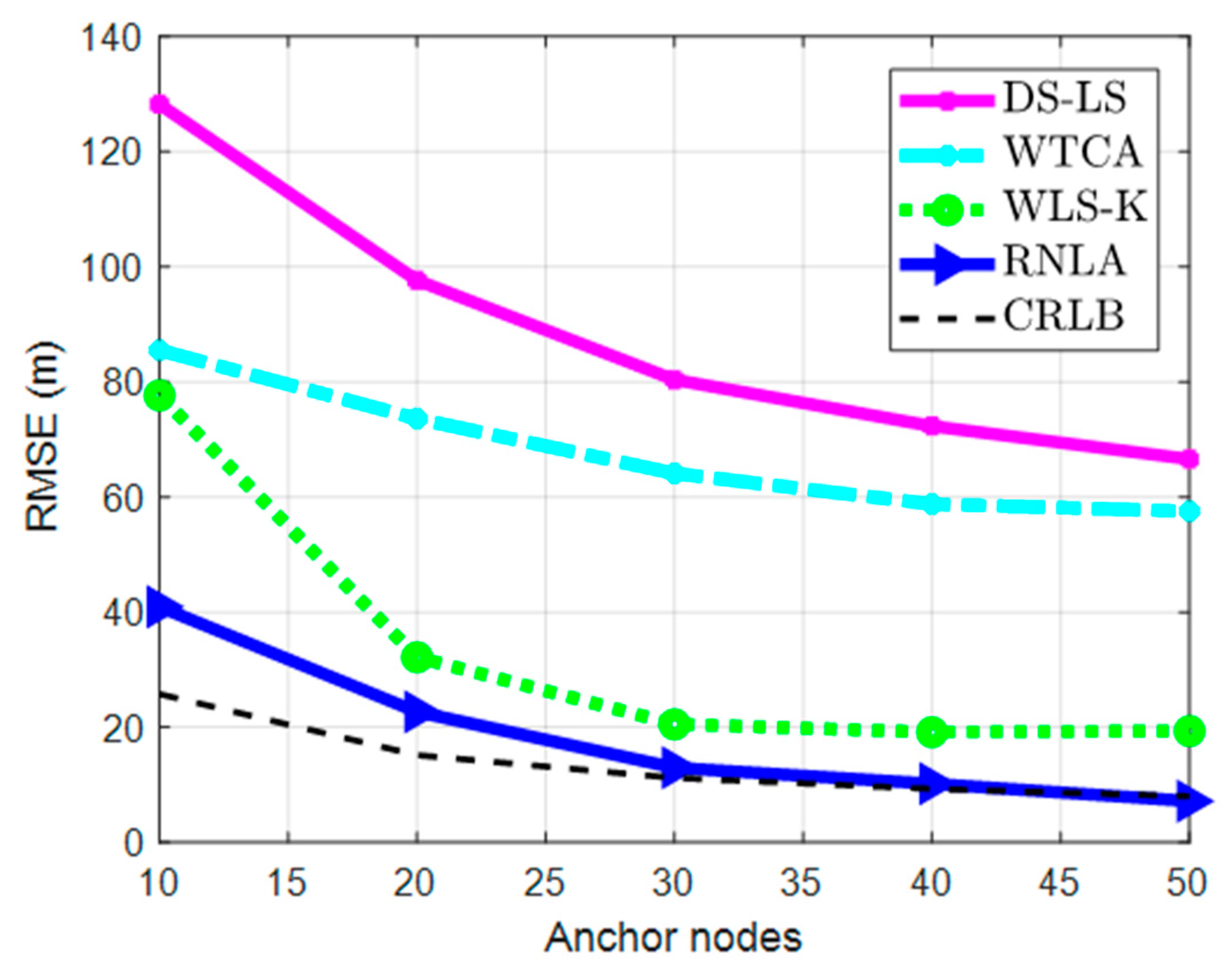
4.1. Scenario with Variable Anchor Nodes
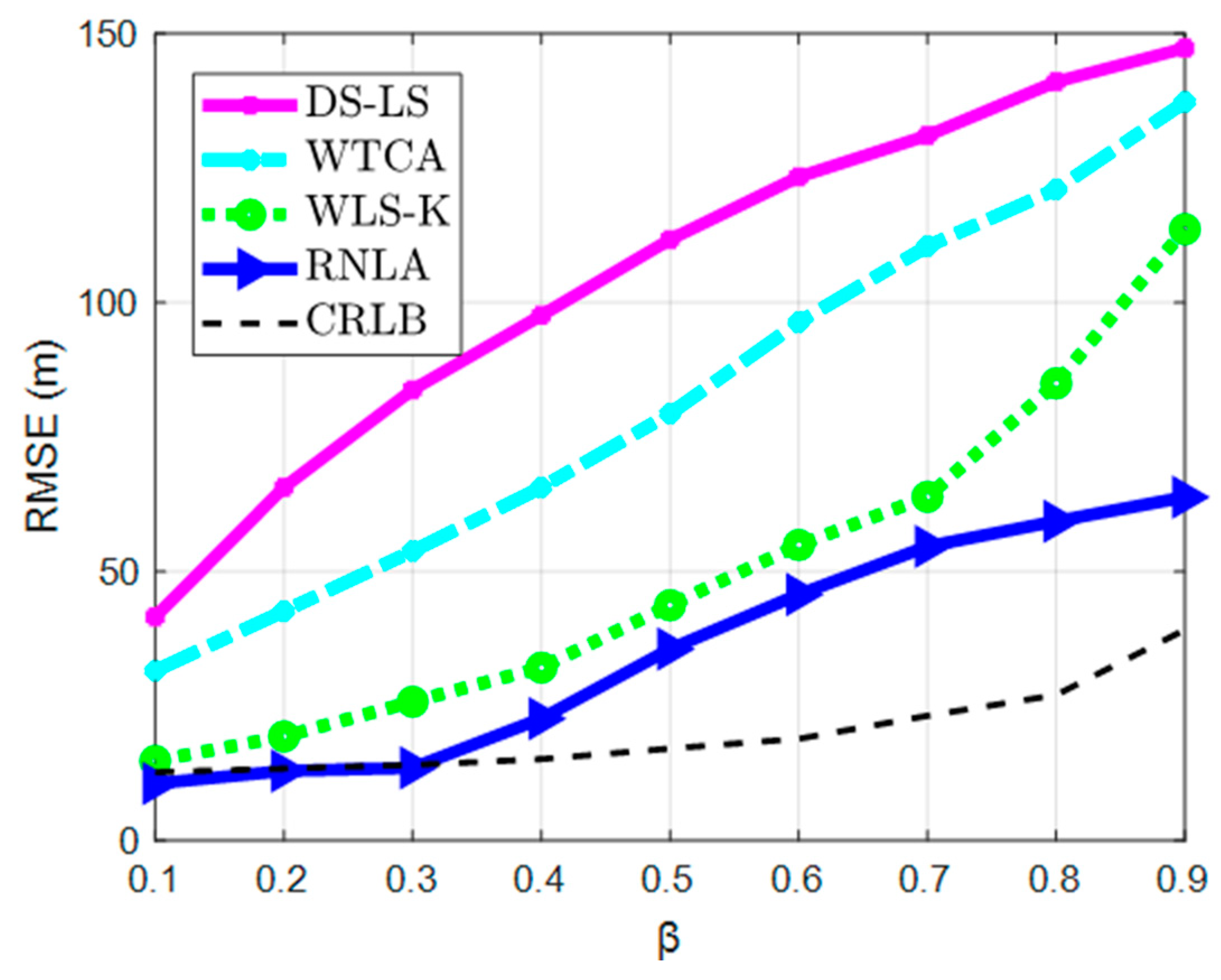
4.2. Scenario with Variable
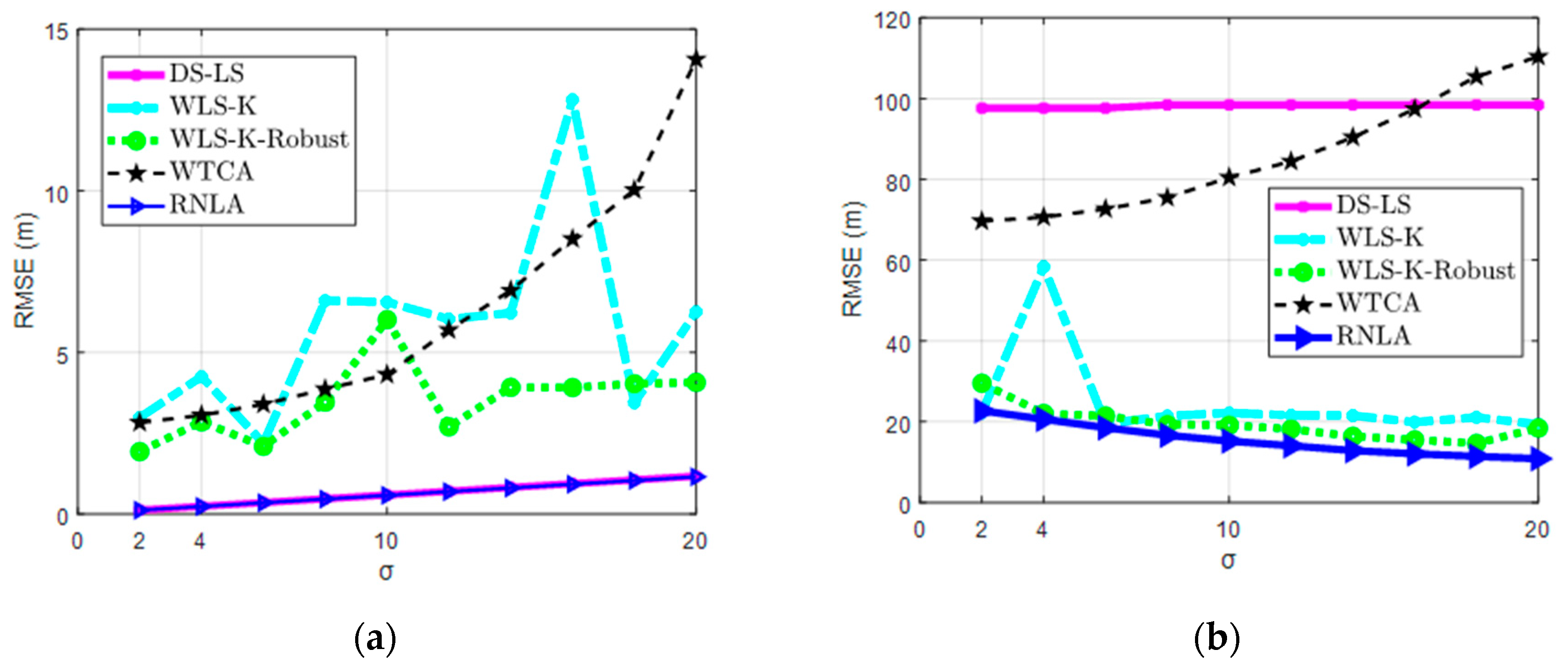
4.3. Scenario with Variable
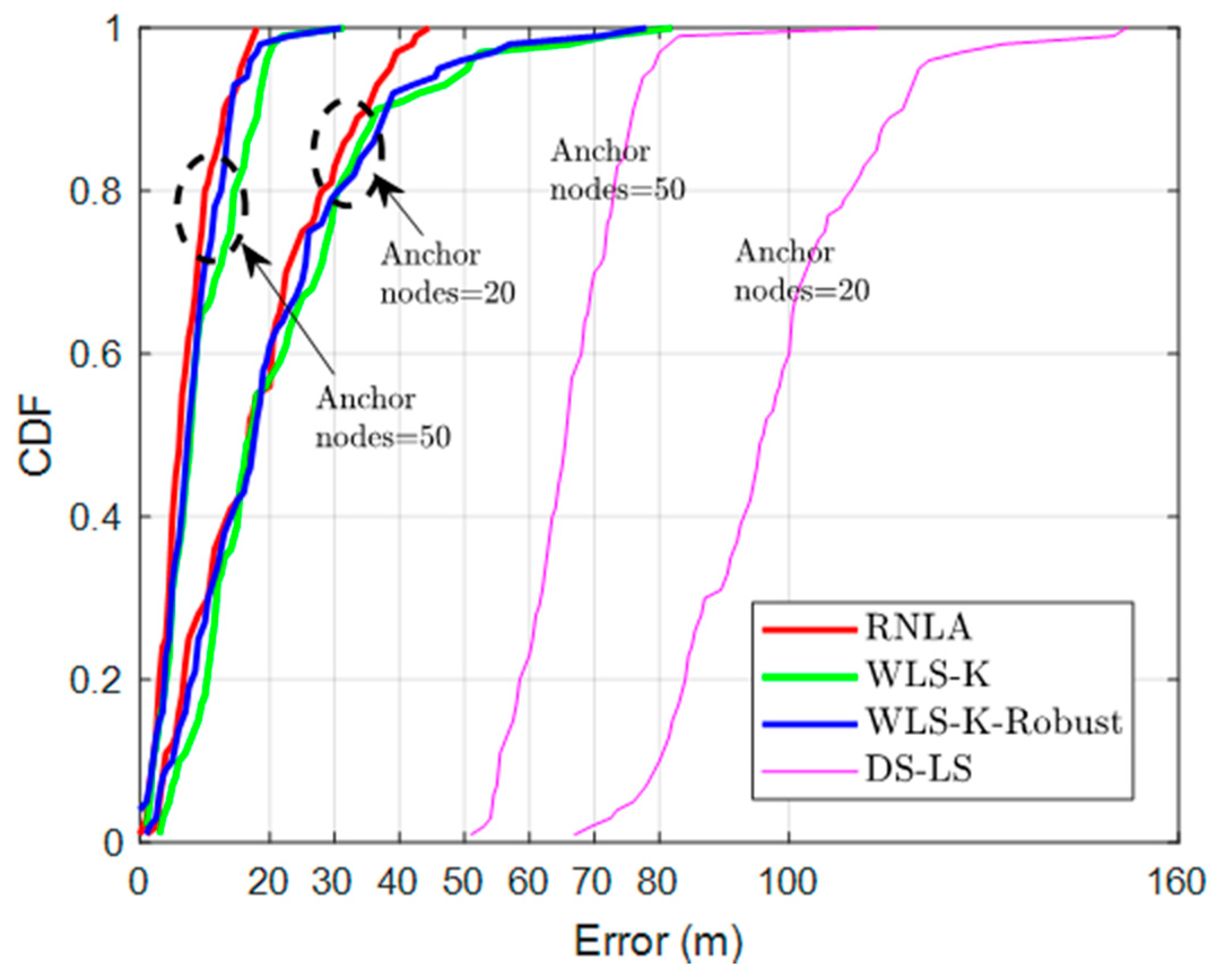
4.4. Cumulative Distribution Function (CDF)
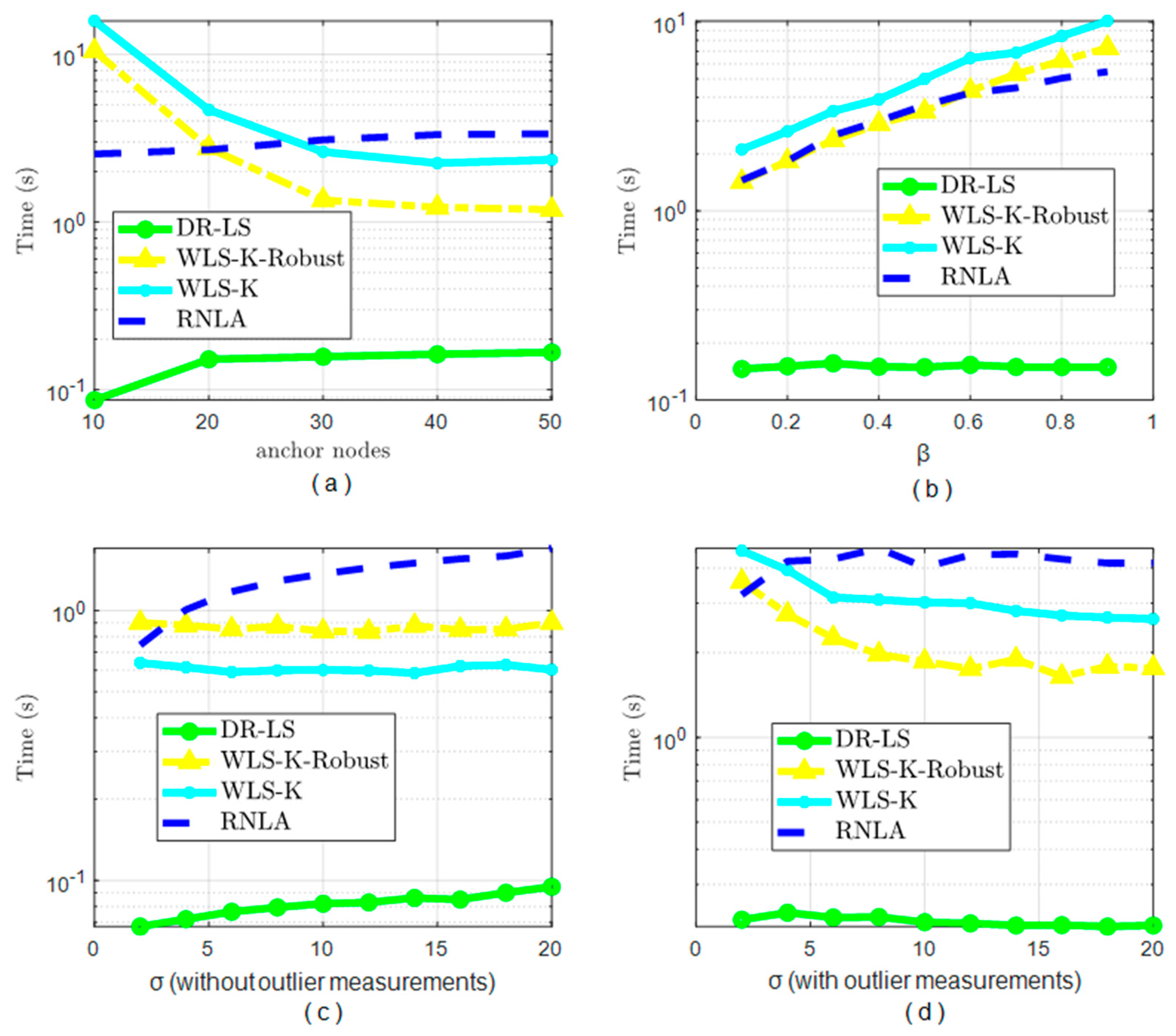
4.5. Computation Time
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Yue, Y.G.; He, P. A Comprehensive Survey on the Reliability of Mobile Wireless Sensor Networks: Taxonomy, Challenges, and Future Directions. Inf. Fusion 2018, 44, 188–204. [Google Scholar] [CrossRef]
- Wu, H.; Xian, J.; Mei, X.; Zhang, Y.; Wang, J.; Cao, J.; Mohapatra, P. Efficient target detection in maritime search and rescue wireless sensor network using data fusion. Comput. Commun. 2019, 136, 53–62. [Google Scholar] [CrossRef]
- Wu, H.; Xian, J.; Wang, J.; Khandge, S.; Mohapatra, P. Missing data recovery using reconstruction in ocean wireless sensor networks. Comput. Commun. 2018, 132, 1–9. [Google Scholar] [CrossRef]
- Chen, X.; Wang, S.; Shi, C.; Wu, H.; Zhao, J.; Fu, J. Robust Ship Tracking via Multi-view Learning and Sparse Representation. J. Navig. 2019, 72, 176–192. [Google Scholar] [CrossRef]
- Russell, J. Ocean sensors can track progress on climate goals. Nature 2018, 555, 287. [Google Scholar] [CrossRef] [PubMed]
- John, P.; Supriya, M.H.; Pillai, P.R.S. Cost effective sensor buoy for ocean environmental monitoring. In Proceedings of the OCEANS 2010 MTS/IEEE SEATTLE, Seattle, WA, USA, 20–23 September 2010; pp. 1–5. [Google Scholar]
- Chen, P.; Ma, H.; Gao, S.; Huang, Y. SSL: Signal Similarity-Based Localization for Ocean Sensor Networks. Sensors 2015, 15, 29702–29720. [Google Scholar] [CrossRef] [Green Version]
- Shit, R.C.; Sharma, S.; Puthal, D.; Zomaya, A.Y. Location of Things (LoT): A Review and Taxonomy of Sensors Localization in IoT Infrastructure. IEEE Commun. Surv. Tutor. 2018, 20, 2028–2061. [Google Scholar] [CrossRef]
- Luo, J.; Fan, L.; Wu, S.; Yan, X. Research on Localization Algorithms Based on Acoustic Communication for Underwater Sensor Networks. Sensors 2018, 18, 67. [Google Scholar] [CrossRef]
- Wu, H.; Mei, X.; Chen, X.; Li, J.; Wang, J.; Mohapatra, P. A novel cooperative localization algorithm using enhanced particle filter technique in maritime search and rescue wireless sensor network. ISA Trans. 2018, 78, 39–46. [Google Scholar] [CrossRef]
- Poursheikhali, S.; Zamiri-Jafarian, H. Received signal strength based localization in inhomogeneous underwater medium. Signal Process. 2019, 154, 45–56. [Google Scholar] [CrossRef]
- Mridula, K.M.; Ameer, P.M. Localization under anchor node uncertainty for underwater acoustic sensor networks. Int. J. Commun. Syst. 2018, 31, e3445. [Google Scholar] [CrossRef]
- Moreno-Salinas, D.; Pascoal, A.; Aranda, J. Optimal Sensor Placement for Acoustic Underwater Target Positioning With Range-Only Measurements. IEEE J. Ocean. Eng. 2016, 41, 620–643. [Google Scholar] [CrossRef]
- Yan, J.; Zhang, X.; Luo, X.; Wang, Y.; Chen, C.; Guan, X. Asynchronous Localization With Mobility Prediction for Underwater Acoustic Sensor Networks. IEEE Trans. Veh. Technol. 2018, 67, 2543–2556. [Google Scholar] [CrossRef]
- Guo, Y.; Han, Q.; Wang, J.; Yu, X. Energy-aware localization algorithm for Ocean Internet of Things. Sens. Rev. 2018, 38, 129–136. [Google Scholar] [CrossRef]
- Emokpae, L.E.; DiBenedetto, S.; Potteiger, B.; Younis, M. UREAL: Underwater Reflection-Enabled Acoustic-Based Localization. IEEE Sens. J. 2014, 14, 3915–3925. [Google Scholar] [CrossRef]
- Yan, Y.; Wang, H.; Shen, X.; Leng, B.; Li, S. Efficient Convex Optimization for Energy-Based Acoustic Sensor Self-Localization and Source Localization in Sensor Networks. Sensors 2018, 18, 1646. [Google Scholar] [CrossRef]
- Moreno-Salinas, D.; Pascoal, A.M.; Aranda, J. Multiple underwater target positioning with optimally placed acoustic surface sensor networks. Int. J. Distrib. Sens. Netw. 2018, 14. [Google Scholar] [CrossRef] [Green Version]
- Mortazavi, E.; Javidan, R.; Dehghani, M.J.; Kavoosi, V. A robust method for underwater wireless sensor joint localization and synchronization. Ocean Eng. 2017, 137, 276–286. [Google Scholar] [CrossRef]
- Chang, S.; Li, Y.; He, Y.; Hui, W. Target Localization in Underwater Acoustic Sensor Networks Using RSS Measurements. Appl. Sci. 2018, 8, 225. [Google Scholar] [CrossRef]
- Lefort, R.; Real, G.; Drémeau, A. Direct regressions for underwater acoustic source localization in fluctuating oceans. Appl. Acoust. 2017, 116, 303–310. [Google Scholar] [CrossRef]
- Gong, Z.; Cheng, L.; Fan, J. AUV-Aided Joint Localization and Time Synchronization for Underwater Acoustic Sensor Networks. IEEE Signal Process. Lett. 2018, 25, 477–481. [Google Scholar] [CrossRef]
- Luo, J.; Fan, L. A Two-Phase Time Synchronization-Free Localization Algorithm for Underwater Sensor Networks. Sensors 2017, 17, 726. [Google Scholar] [CrossRef] [PubMed]
- Das, A.P.; Thampi, S.M. Fault-resilient localization for underwater sensor networks. Ad Hoc Netw. 2017, 55, 132–142. [Google Scholar] [CrossRef]
- Li, Y.; Wang, Y.; Guan, X. Belief Propagation Based Multi-AUV Cooperative Localization in Anchor-free Environments. In Proceedings of the 2018 Fourth Underwater Communications and Networking Conference (UComms), Lerici, Italy, 28–30 August 2018. [Google Scholar]
- Mei, X.; Wu, H.; Chen, Y.; Jiang, E. Ship tracking of wireless sensor network based on improved adaptive particle filter. J. Shanghai Marit. Univ. 2018, 39, 12–16. [Google Scholar]
- Zaeemzadeh, A.; Joneidi, M.; Shahrasbi, B.; Rahnavard, N. Robust Target Localization Based on Squared Range Iterative Reweighted Least Squares. In Proceedings of the 2017 IEEE 14th International Conference on Mobile Ad Hoc and Sensor Systems (MASS), Orlando, FL, USA, 22–25 October 2017; pp. 380–388. [Google Scholar]
- Pinheiro, B.C.; Moreno, U.F.; De Sousa, J.T.B.; Rodriguez, O.C. Kernel-Function-Based Models for Acoustic Localization of Underwater Vehicles. IEEE J. Ocean. Eng. 2017, 42, 603–618. [Google Scholar] [CrossRef]
- Saeed, N.; Al-Naffouri, T.Y.; Alouini, M.S. Outlier Detection and Optimal Anchor Placement for 3-D Underwater Optical Wireless Sensor Network Localization. IEEE Trans. Commun. 2019, 67, 611–622. [Google Scholar] [CrossRef]
- Soares, C.; Gomes, J.; Ferreira, B.Q.; Costeira, J.P. LocDyn: Robust Distributed Localization for Mobile Underwater Networks. IEEE J. Ocean. Eng. 2017, 42, 1063–1074. [Google Scholar] [CrossRef] [Green Version]
- Brockett, P.L.; Hinich, M.; Wilson, G.R. Nonlinear and non-Gaussian ocean noise. J. Acoust. Soc. Am. 1987, 82, 1386. [Google Scholar] [CrossRef]
- More, J.J. Generalizations of the trust region problem. Optim. Methods Softw. 1993, 2, 21. [Google Scholar] [CrossRef]
- Peng, H.; Fan, Y. A General Framework for Sparsity Regularized Feature Selection via Iteratively Reweighted Least Square Minimization. In Proceedings of the Thirty-First AAAI Conference on Artificial Intelligence, San Francisco, CA, USA, 4–9 February 2017. [Google Scholar]
- Lerman, G.; Maunu, T. Fast, Robust and Non-convex Subspace Recovery. arXiv 2018, arXiv:1406.6145. [Google Scholar] [CrossRef]
- Huber, P.J. Robust statistics. J. Am. Stat. Assoc. 2011, 78, 1248–1251. [Google Scholar]
- Xu, Y.; Yin, W. A Globally Convergent Algorithm for Nonconvex Optimization Based on Block Coordinate Update. J. Sci. Comput. 2017, 72, 700–734. [Google Scholar] [CrossRef] [Green Version]
- Sengupta, S.K. Fundamentals of Statistical Signal Processing: Estimation Theory. Technometrics 1995, 37, 465–466. [Google Scholar] [CrossRef]
- Tomic, S.; Beko, M.; Dinis, R. 3-D Target Localization in Wireless Sensor Networks Using RSS and AoA Measurements. IEEE Trans. Veh. Technol. 2017, 66, 3197–3210. [Google Scholar] [CrossRef]
- López-Rubio, E. Restoration of images corrupted by Gaussian and uniform impulsive noise. Pattern Recognit. 2010, 43, 1835–1846. [Google Scholar] [CrossRef]
- Lathuilière, S.; Mesejo, P.; Alameda-Pineda, X.; Horaud, R. DeepGUM: Learning Deep Robust Regression with a Gaussian-Uniform Mixture Model. arXiv 2018, arXiv:1808.09211. [Google Scholar]
- De Angelis, A.; De Angelis, G.; Carbone, P. Using Gaussian-Uniform Mixture Models for Robust Time-Interval Measurement. IEEE Trans. Instrum. Meas. 2015, 64, 3545–3554. [Google Scholar] [CrossRef]
- Nagy, I.; Suzdaleva, E. Clustering Non-Gaussian Data Using Mixture Estimation with Uniform Components BT—Practical Issues of Intelligent Innovations. In Practical Issues of Intelligent Innovations; Sgurev, V., Jotsov, V., Kacprzyk, J., Eds.; Springer International Publishing: Cham, Switzerland, 2018; pp. 313–330. ISBN 978-3-319-78437-3. [Google Scholar]
- Wu, H.; Yang, L.; Liu, L.; Xu, M.; Guan, X. Real-time localization algorithm for maritime search and rescue wireless sensor network. Int. J. Distrib. Sens. Netw. 2013, 2013, 188–192. [Google Scholar] [CrossRef]







© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mei, X.; Wu, H.; Xian, J.; Chen, B.; Zhang, H.; Liu, X. A Robust, Non-Cooperative Localization Algorithm in the Presence of Outlier Measurements in Ocean Sensor Networks. Sensors 2019, 19, 2708. https://doi.org/10.3390/s19122708
Mei X, Wu H, Xian J, Chen B, Zhang H, Liu X. A Robust, Non-Cooperative Localization Algorithm in the Presence of Outlier Measurements in Ocean Sensor Networks. Sensors. 2019; 19(12):2708. https://doi.org/10.3390/s19122708
Chicago/Turabian StyleMei, Xiaojun, Huafeng Wu, Jiangfeng Xian, Bowen Chen, Hao Zhang, and Xia Liu. 2019. "A Robust, Non-Cooperative Localization Algorithm in the Presence of Outlier Measurements in Ocean Sensor Networks" Sensors 19, no. 12: 2708. https://doi.org/10.3390/s19122708
APA StyleMei, X., Wu, H., Xian, J., Chen, B., Zhang, H., & Liu, X. (2019). A Robust, Non-Cooperative Localization Algorithm in the Presence of Outlier Measurements in Ocean Sensor Networks. Sensors, 19(12), 2708. https://doi.org/10.3390/s19122708