Two-Stage Latent Dynamics Modeling and Filtering for Characterizing Individual Walking and Running Patterns with Smartphone Sensors

Abstract
:1. Introduction
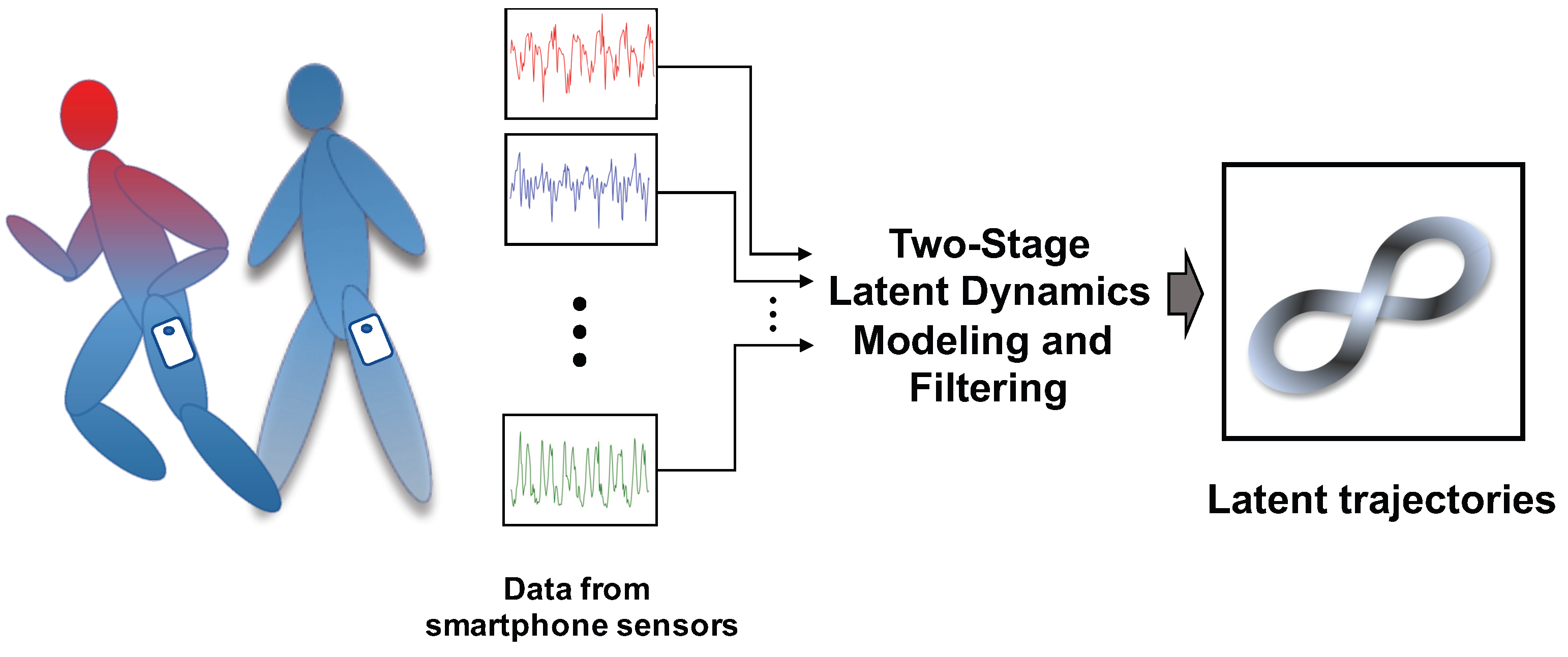
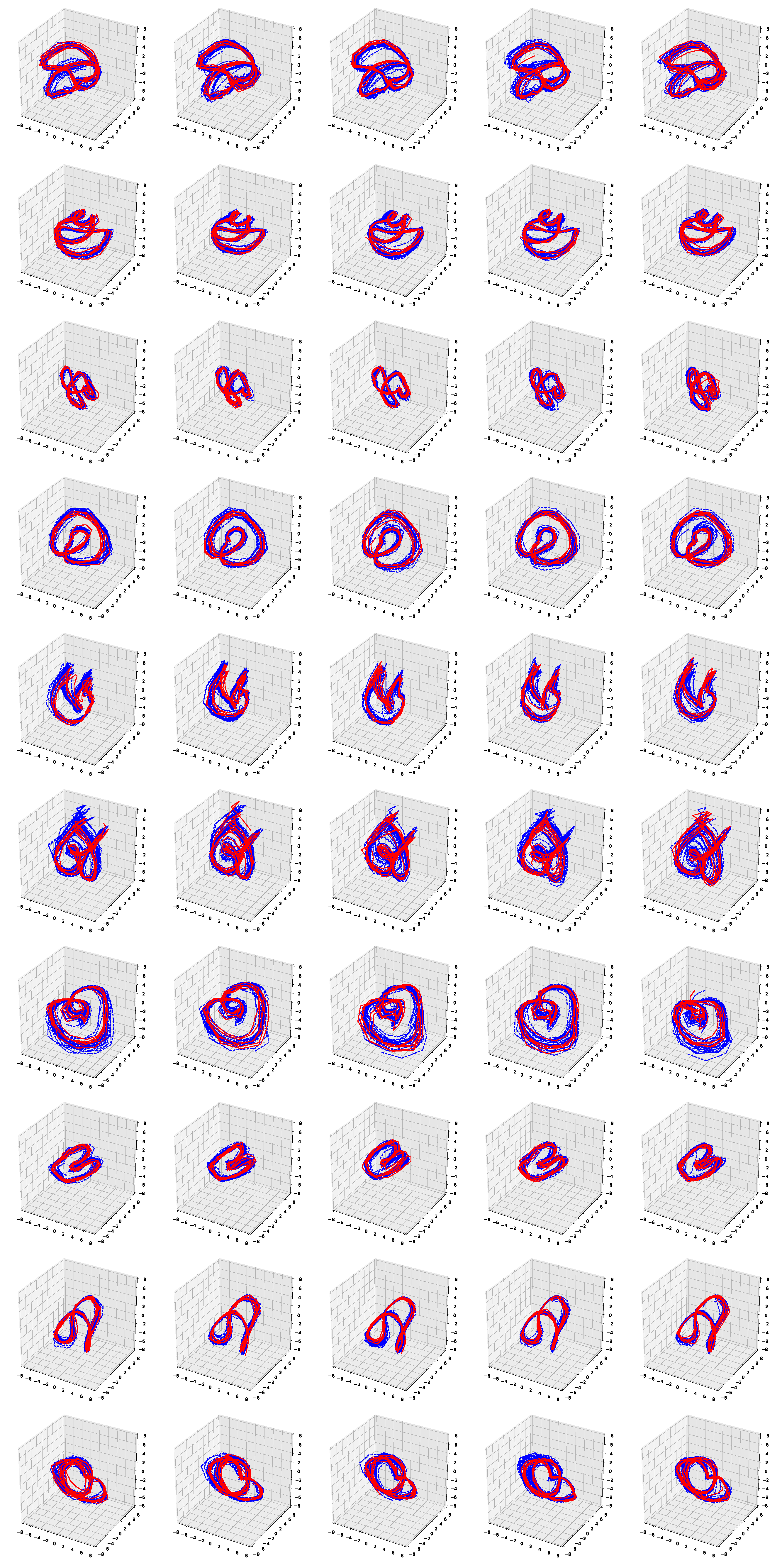
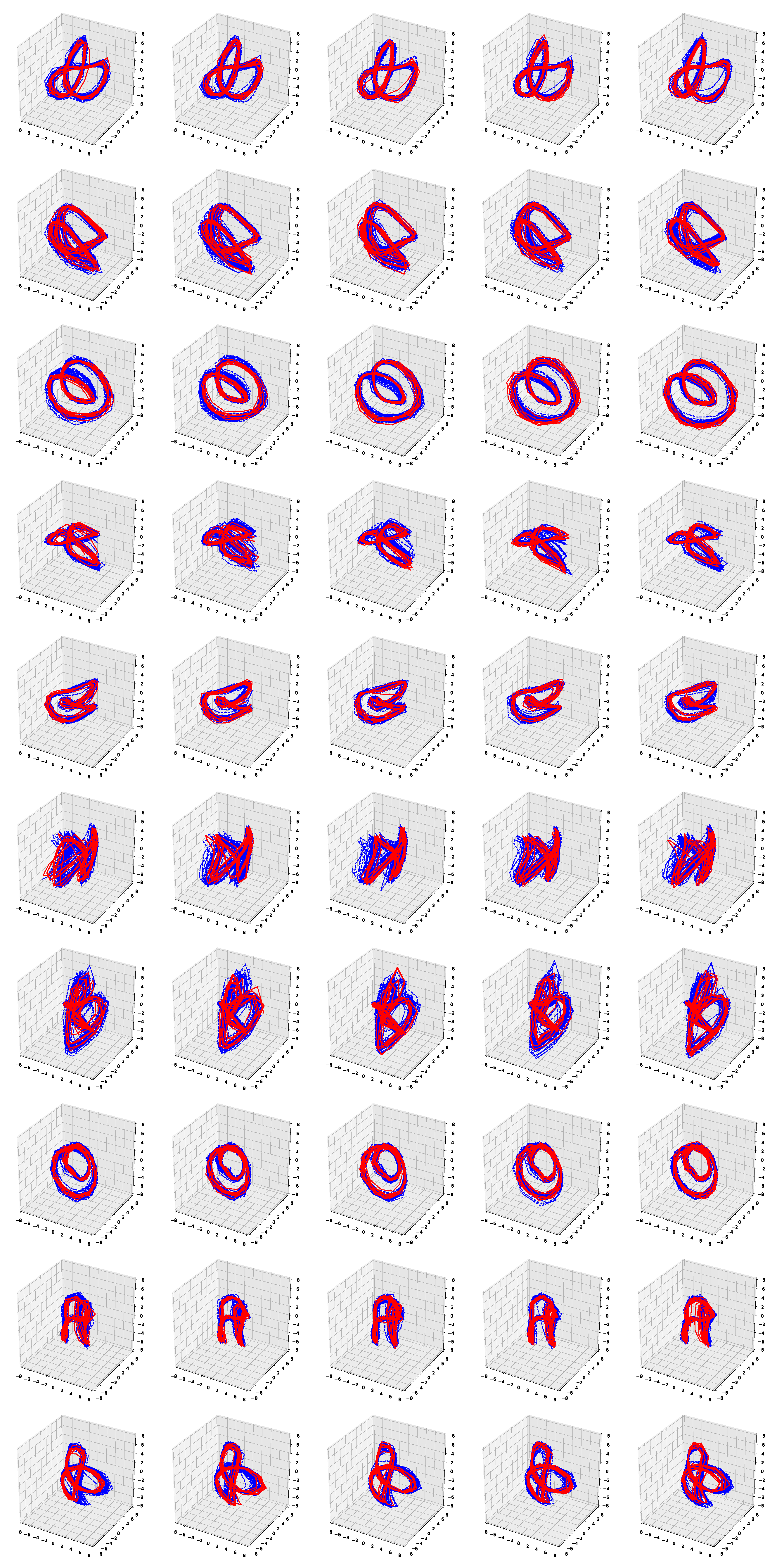
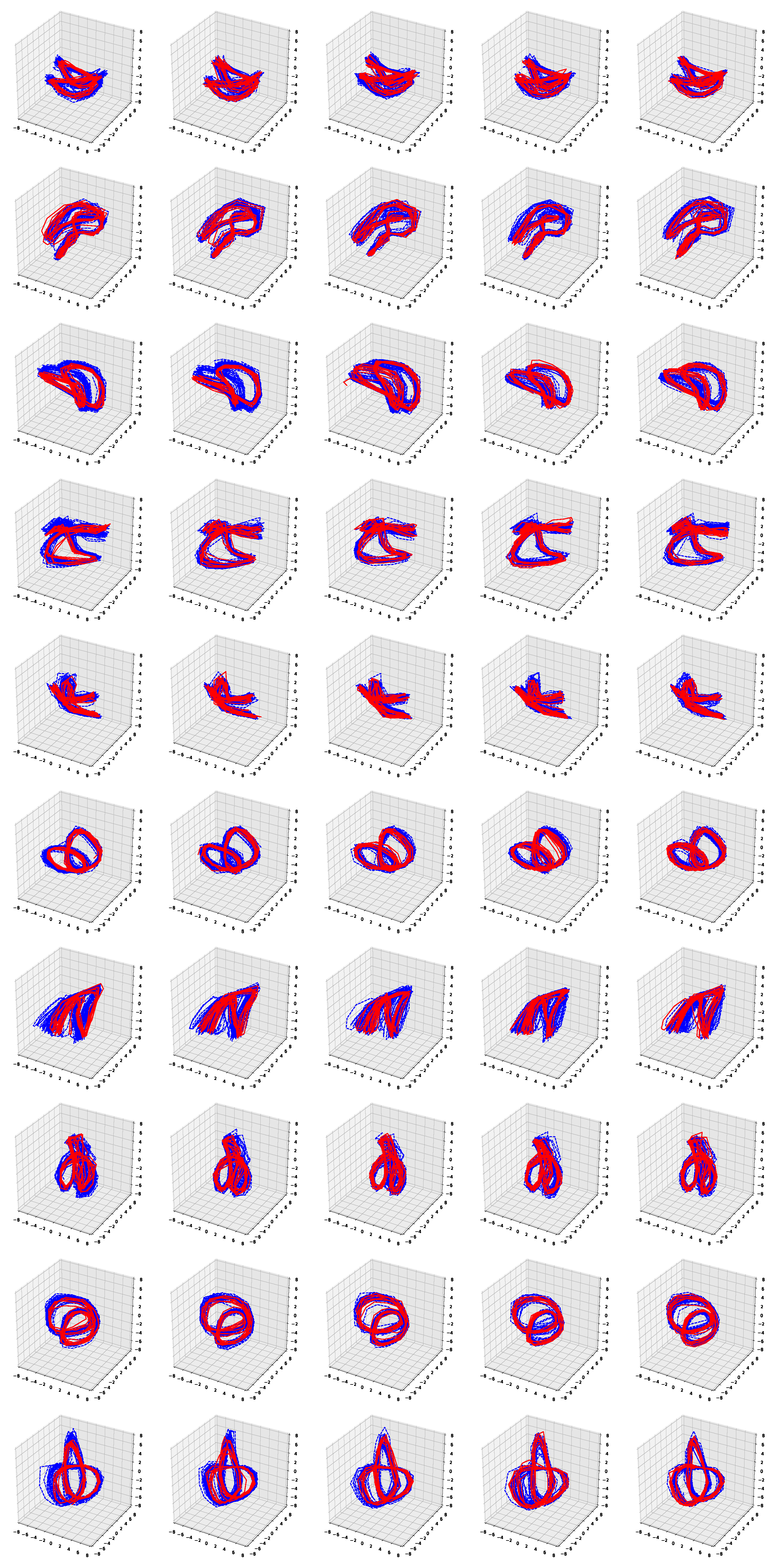
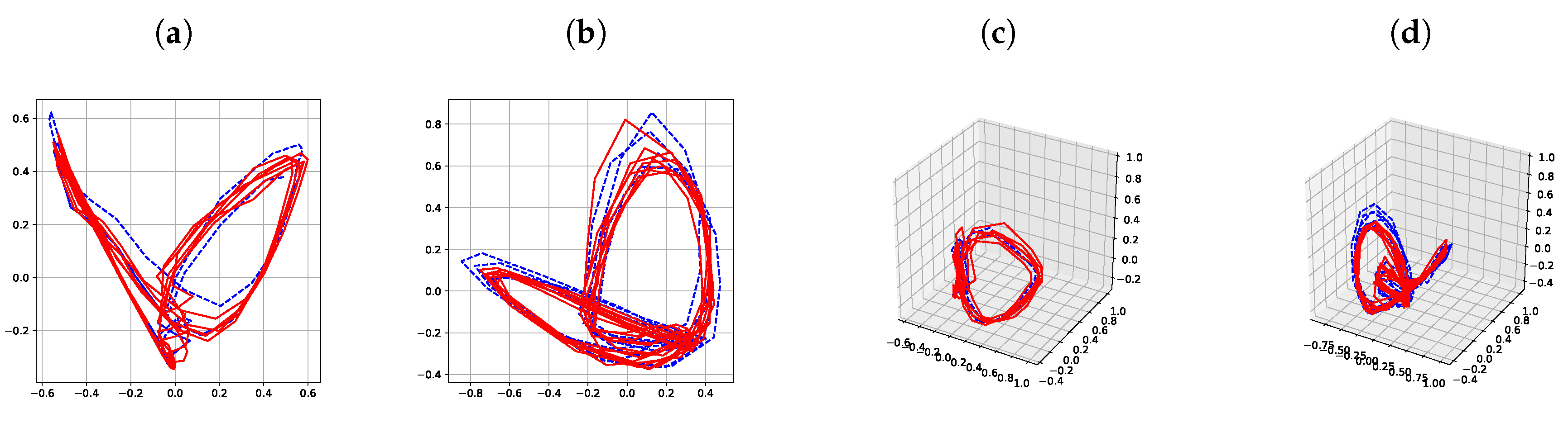
- In order to obtain low-dimensional intrinsic trajectories associated with walking and running data, we propose a novel method referred to as ’two-stage latent dynamics modeling and filtering’, which combines a latent dynamics modeling stage together with non-linear incremental filtering stage.
- The proposed method can yield simple and intrinsic representation in latent spaces for walking and running. Providing simple and intrinsic representation in latent spaces for human movements is a great help in a variety of application fields such as the entertainment, healthcare, and medical domains.
- Our works are based on smartphone data, which ensures easy accessibility and convenient deployment in real applications.
2. Methods
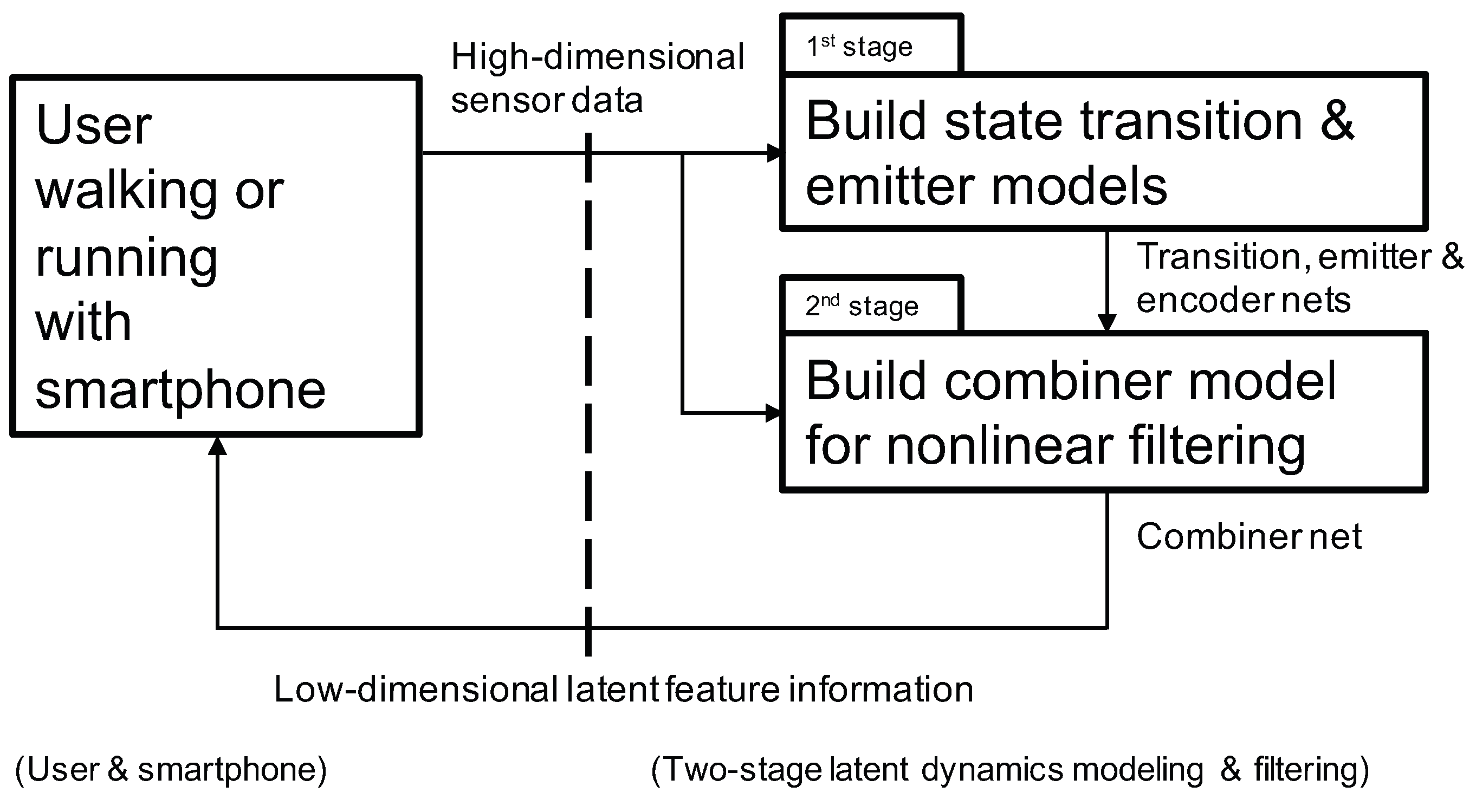
2.1. Backbone Structure of TS-LDMF
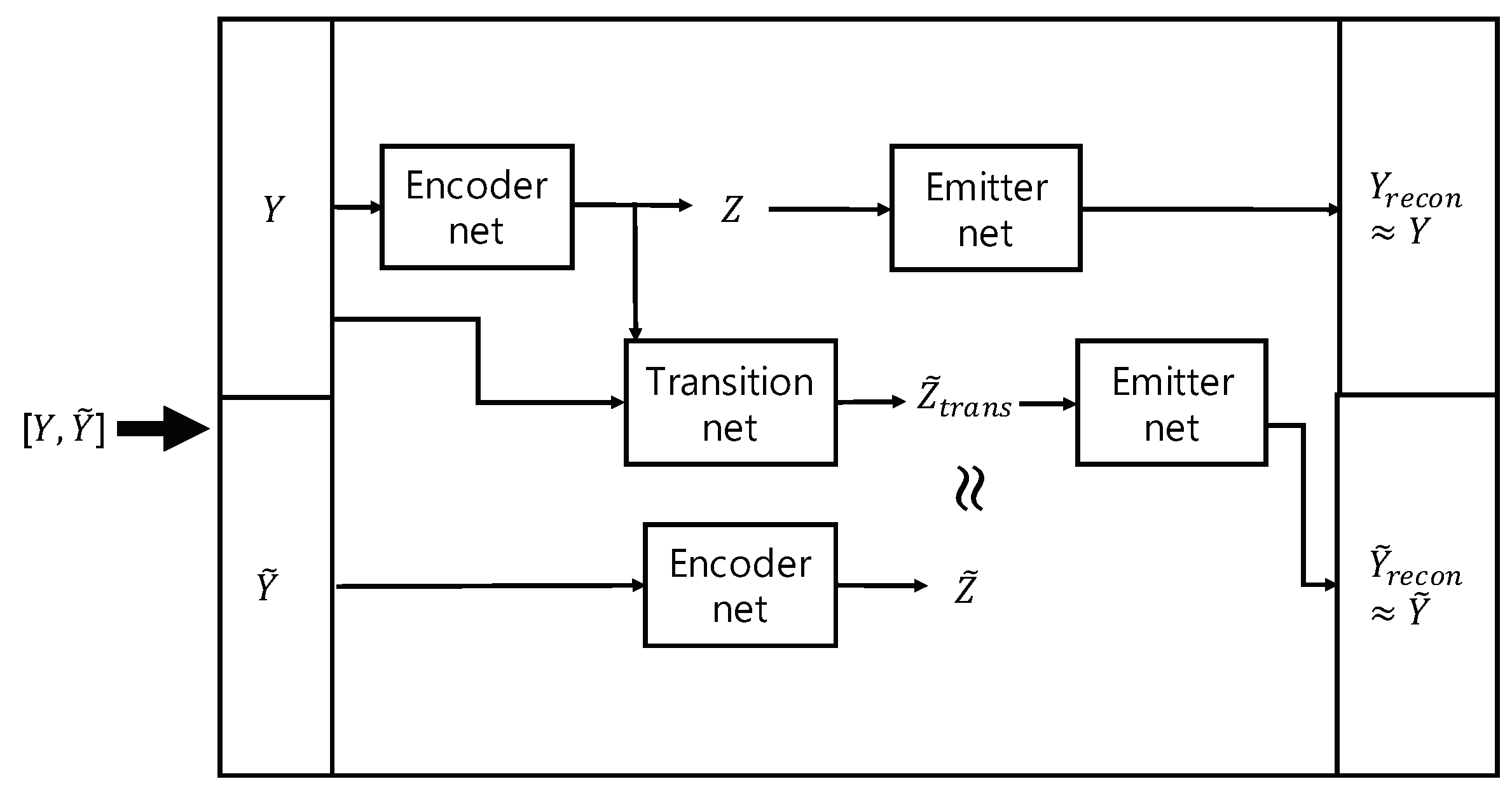
2.2. First Stage of TS-LDMF for Modeling Latent Dynamics
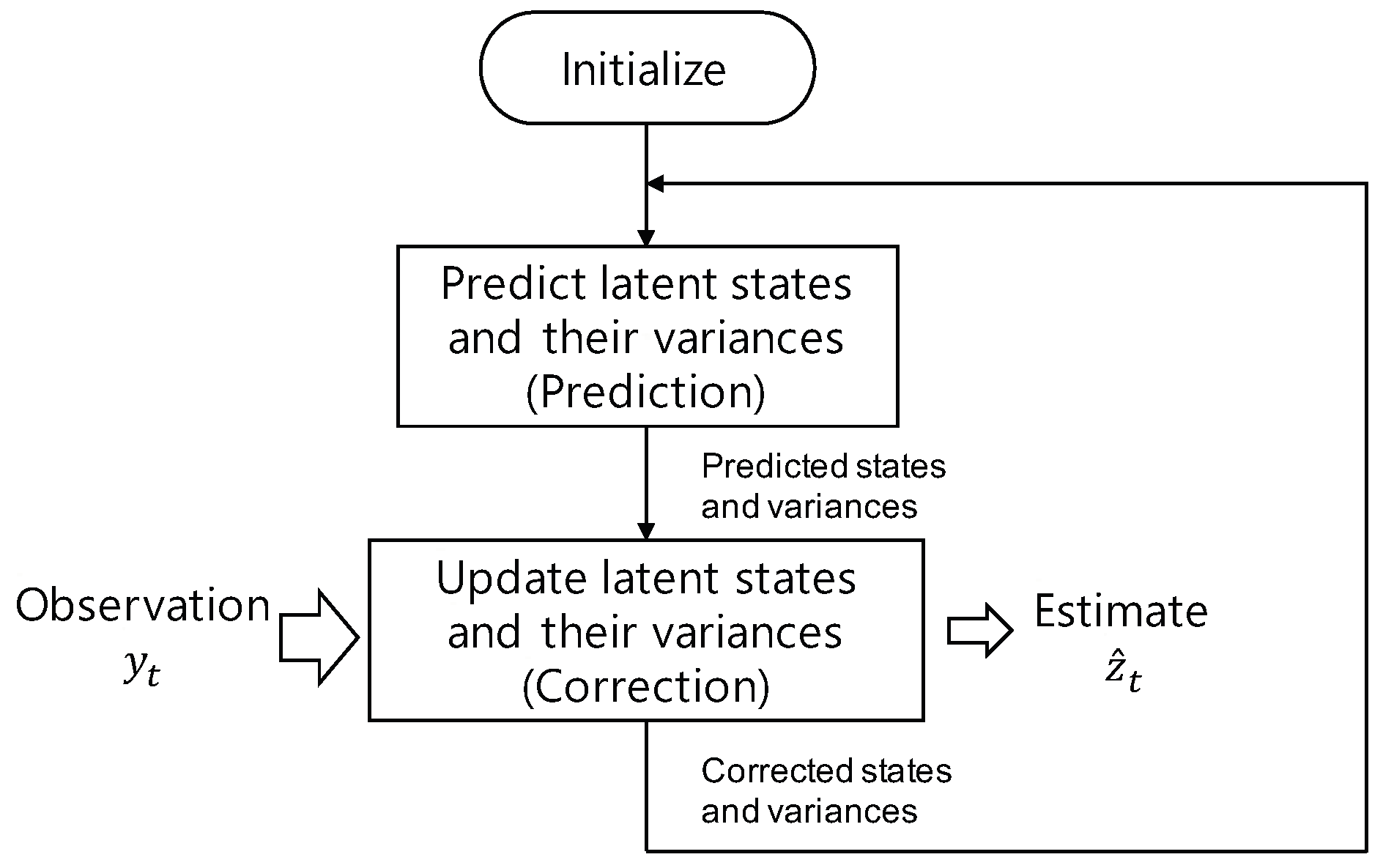
2.3. Second Stage of TS-LDMF for Estimating Latent Variables
3. Experimental Results
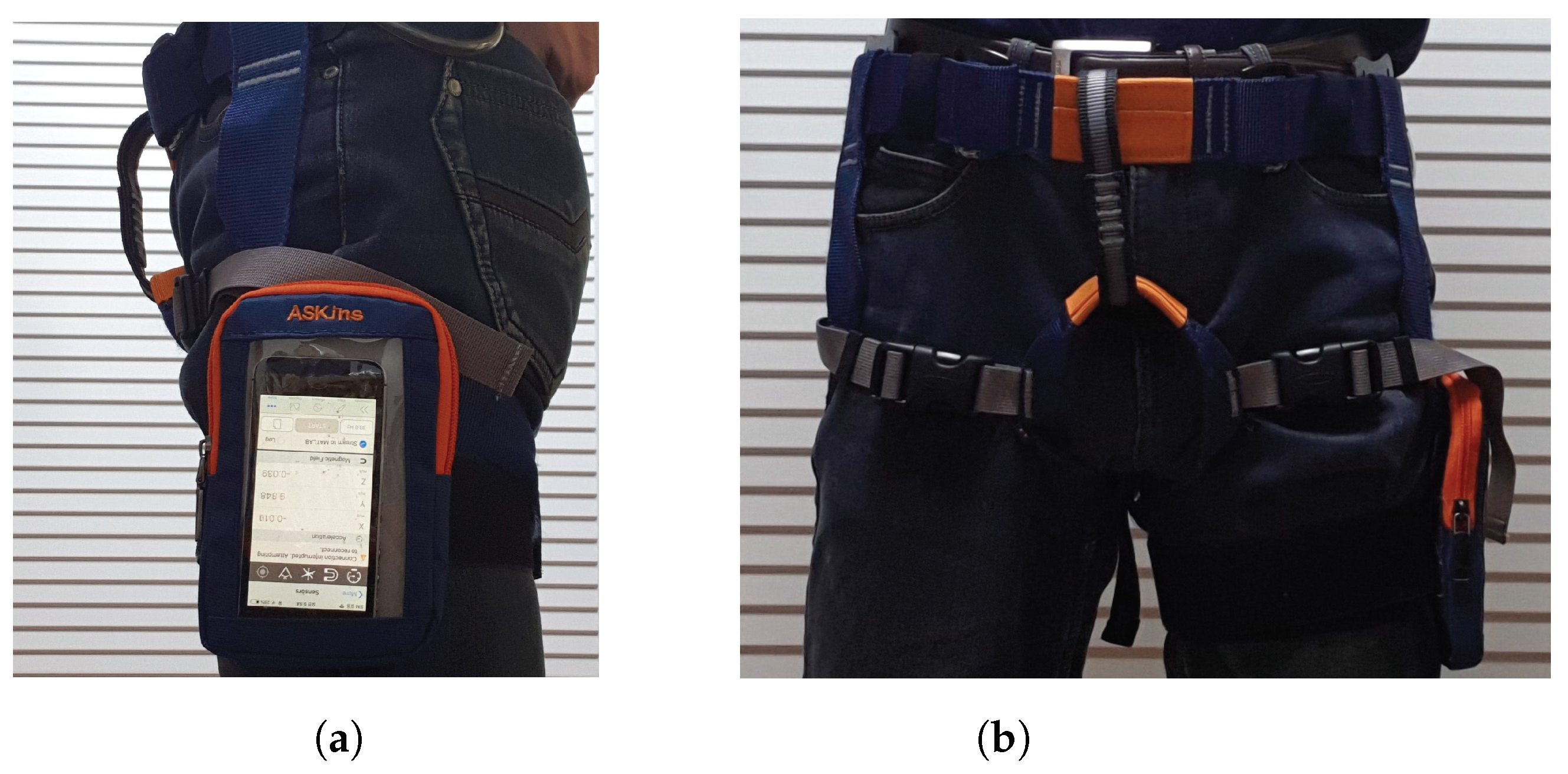
3.1. Data Collection
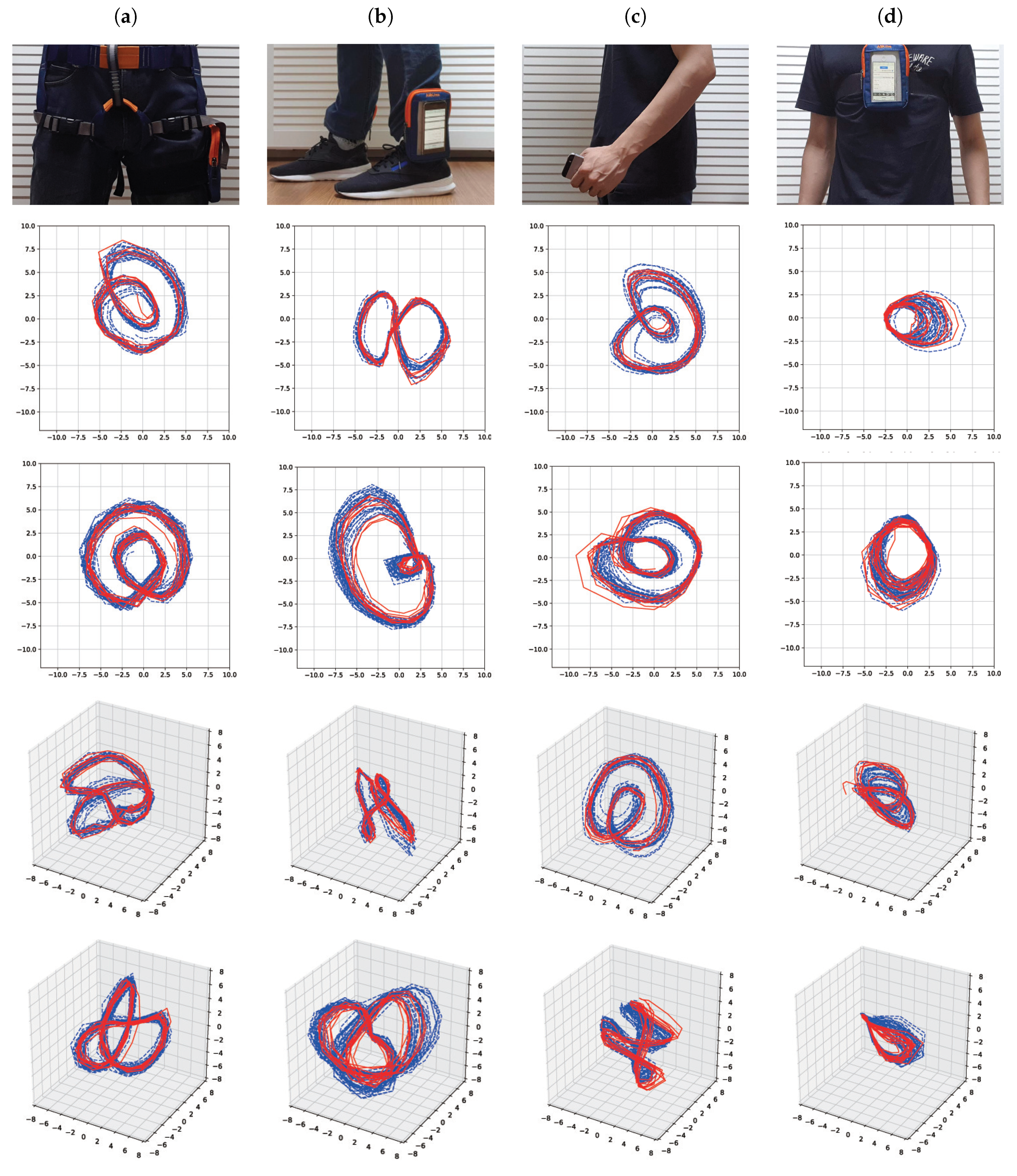
- (a)
- Set the predefined course for walking and running.
- (b)
- Set parameter (sampling rate: 30 Hz, data collection time: 60 s) with help of MATLAB Support Package for Apple iOS Sensors.
- (c)
- Run Matlab Mobile on the iPhone.
- (d)
- Connect the iPhone to the desktop on the same Wifi network.
- (e)
- Position the iPhone to the predefined location and position.
- (f)
- Instruct the subject to walk on the predefined course.
- (g)
- Initiate the countdown prior to the data recording.
- (h)
- Let the subject begin walking before completing the countdown.
- (i)
- Upon completion of the data recording, have the subject stop.
- (j)
- Save the recorded data (angular velocity around the x, y, z-direction; acceleration along the x, y, z-direction) and conduct preprocessing for data (total magnitude of angular velocity and total magnitude of acceleration) on the desktop.
- (k)
- Repeat steps (d) through (j) for running.
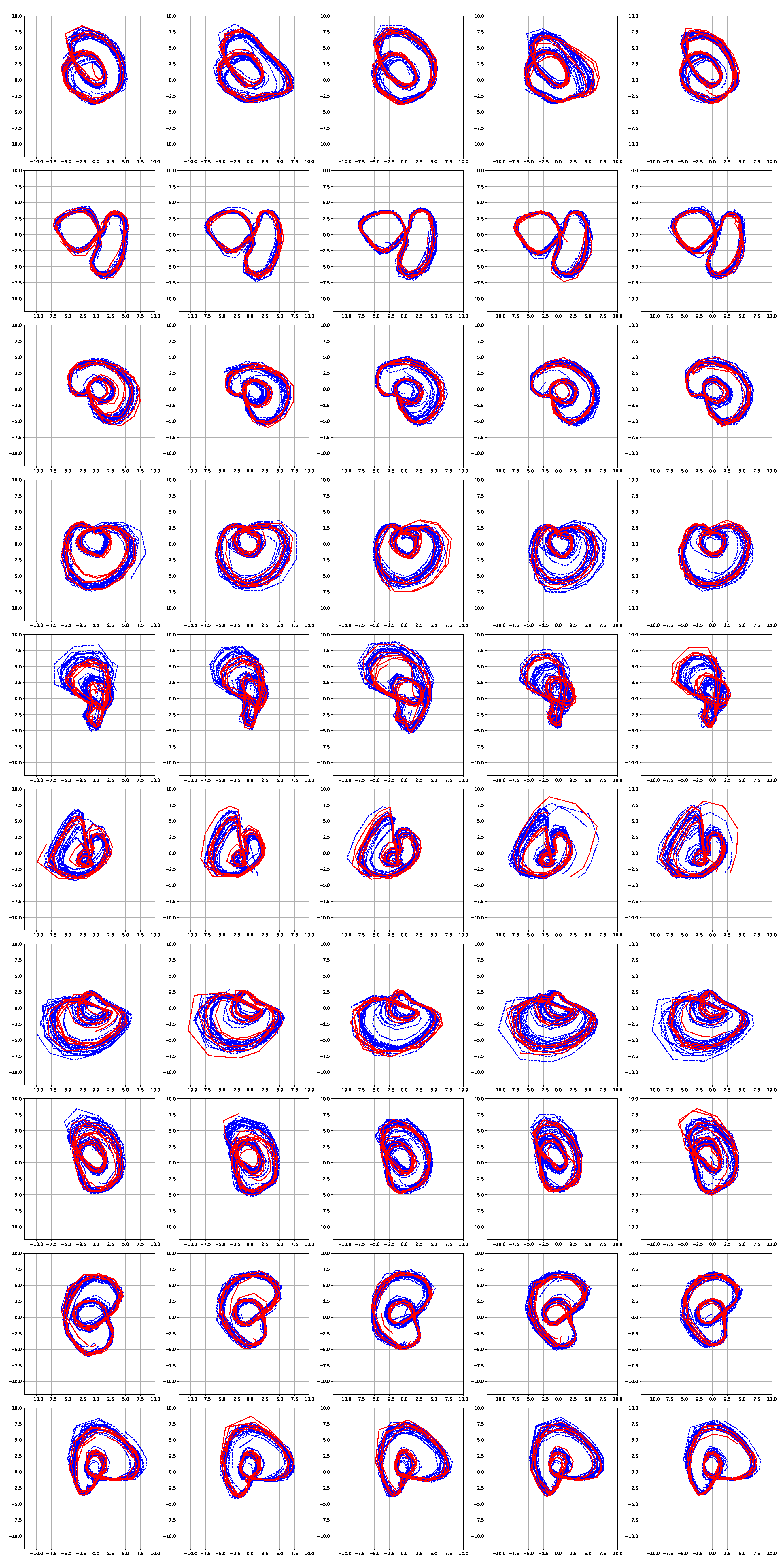
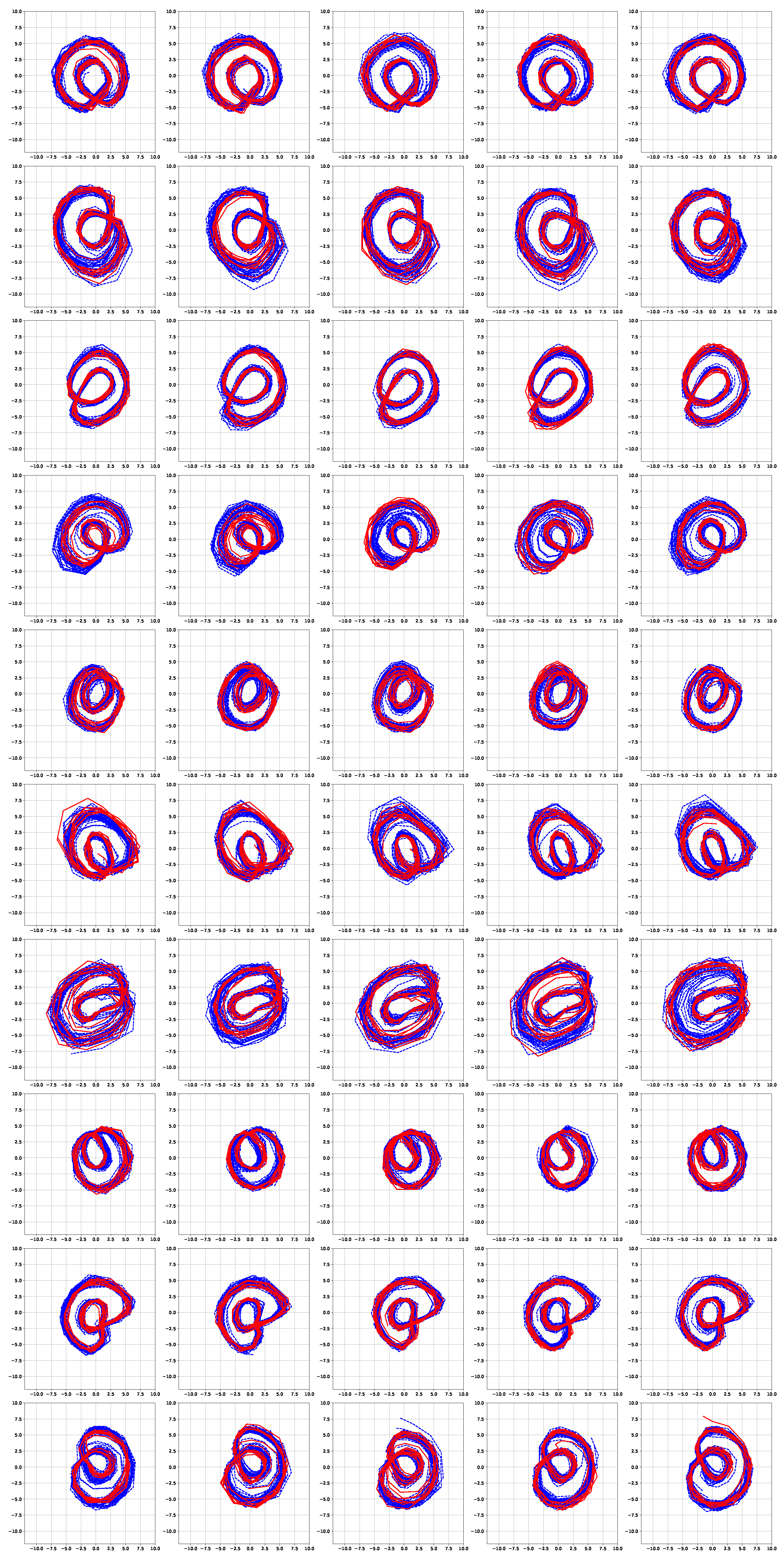
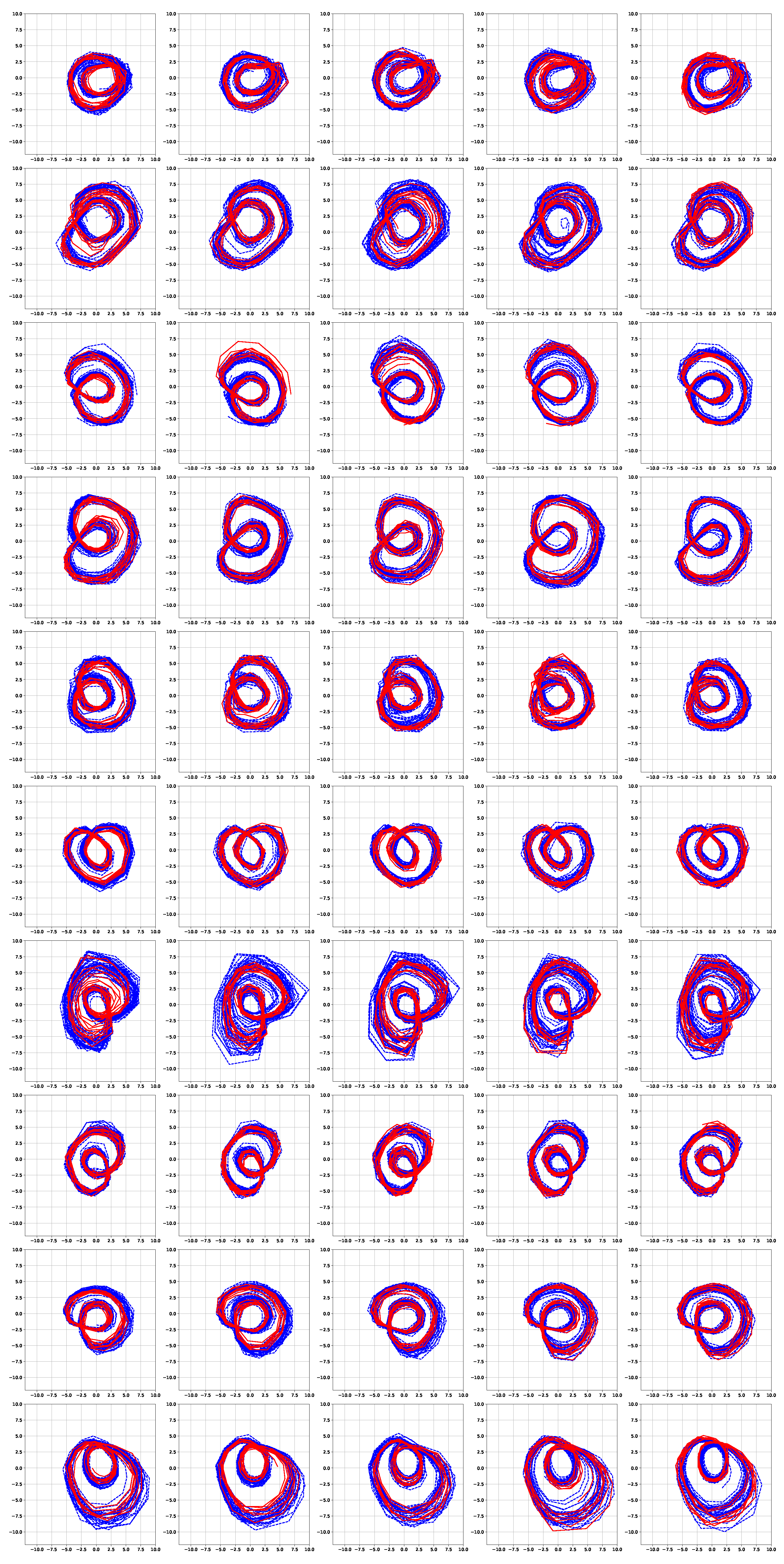
3.2. Experimental Results
3.3. Performance Comparison
4. Discussion and Conclusions
4.1. Discussion
4.2. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Sekine, M.; Tamura, T.; Fujimoto, T.; Fukui, Y. Classification of walking pattern using acceleration waveform in elderly people. In Proceedings of the 2000 22nd Annual International Conference of the Engineering in Medicine and Biology Society, Chicago, IL, USA, 23–28 July 2000; Volume 2, pp. 1356–1359. [Google Scholar]
- Papagiannaki, A.; Zacharaki, E.I.; Kalouris, G.; Kalogiannis, S.; Deltouzos, K.; Ellul, J.; Megalooikonomou, V. Recognizing Physical Activity of Older People from Wearable Sensors and Inconsistent Data. Sensors 2019, 19, 880. [Google Scholar] [CrossRef] [PubMed]
- Jiang, W.; Yin, Z. Human activity recognition using wearable sensors by deep convolutional neural networks. In Proceedings of the 23rd ACM international conference on Multimedia, Brisbane, Australia, 26–30 October 2015; pp. 1307–1310. [Google Scholar]
- Wang, N.; Ambikairajah, E.; Lovell, N.H.; Celler, B.G. Accelerometry based classification of walking patterns using time-frequency analysis. In Proceedings of the 2007 29th Annual International Conference of the Engineering in Medicine and Biology Society, Lyon, France, 23–26 August 2007; Volume 5, pp. 4899–4902. [Google Scholar]
- Mubashir, M.; Shao, L.; Seed, L. A survey on fall detection: Principles and approaches. Neurocomputing 2013, 100, 144–152. [Google Scholar] [CrossRef]
- Delahoz, Y.; Labrador, M. Survey on fall detection and fall prevention using wearable and external sensors. Sensors 2014, 14, 19806–19842. [Google Scholar] [CrossRef] [PubMed]
- Zhang, T.; Wang, J.; Xu, L.; Liu, P. Fall detection by wearable sensor and one-class SVM algorithm. In Intelligent Computing in Signal Processing and Pattern Recognition; Springer: Berlin/Heidelberg, Germnay, 2006. [Google Scholar]
- Habib, M.; Mohktar, M.; Kamaruzzaman, S.; Lim, K.; Pin, T.; Ibrahim, F. Smartphone-based solutions for fall detection and prevention: Challenges and open issues. Sensors 2014, 14, 7181–7208. [Google Scholar] [CrossRef] [PubMed]
- Kim, T.; Park, J.; Heo, S.; Sung, K.; Park, J. Characterizing Dynamic Walking Patterns and Detecting Falls with Wearable Sensors Using Gaussian Process Methods. Sensors 2017, 17, 1172–1185. [Google Scholar] [CrossRef] [PubMed]
- Jolliffe, I. Principal Component Analysis; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Schölkopf, B.; Smola, A.J. Learning with Kernels: Support Vector Machines, Regularization, Optimization, and Beyond; MIT Press: Cambridge, MA, USA, 2001. [Google Scholar]
- Krishnan, R.G.; Shalit, U.; Sontag, D. Structured inference networks for nonlinear state space models. In Proceedings of the Thirty-First AAAI Conference on Artificial Intelligence, San Francisco, CA, USA, 4–9 February 2017. [Google Scholar]
- Wu, H.; Mardt, A.; Pasquali, L.; Noe, F. Deep Generative Markov State Models. In Advances in Neural Information Processing Systems; Neural Information Processing Systems Foundation, Inc.: San Diego, CA, USA, 2018; pp. 3975–3984. [Google Scholar]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436. [Google Scholar] [CrossRef] [PubMed]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Schmidhuber, J. Deep learning in neural networks: An overview. Neural Netw. 2015, 61, 85–117. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kingma, D.P.; Welling, M. Auto-Encoding Variational Bayes. The International Conference on Learning Representations (ICLR) 2014. Available online: https://arxiv.org/pdf/1312.6114v10.pdf (accessed on 1 May 2014).
- Doersch, C. Tutorial on variational autoencoders. arXiv 2016, arXiv:1606.05908. [Google Scholar]
- Goodfellow, I.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative adversarial nets. In Advances in Neural Information Processing Systems; Neural Information Processing Systems Foundation, Inc.: San Diego, CA, USA, 2014; pp. 2672–2680. [Google Scholar]
- Goodfellow, I. NIPS 2016 tutorial: Generative adversarial networks. arXiv 2016, arXiv:1701.00160. [Google Scholar]
- Chen, T.Q.; Rubanova, Y.; Bettencourt, J.; Duvenaud, D.K. Neural ordinary differential equations. In Advances in Neural Information Processing Systems; Neural Information Processing Systems Foundation, Inc.: San Diego, CA, USA, 2018; pp. 6571–6583. [Google Scholar]
- Grathwohl, W.; Chen, R.T.; Bettencourt, J.; Duvenaud, D. Scalable Reversible Generative Models with Free-form Continuous Dynamics. In Proceedings of the International Conference on Learning Representations, New Orleans, LA, USA, 6–9 May 2019. [Google Scholar]
- Karantonis, D.M.; Narayanan, M.R.; Mathie, M.; Lovell, N.H.; Celler, B.G. Implementation of a real-time human movement classifier using a triaxial accelerometer for ambulatory monitoring. IEEE Trans. Inf. Technol. Biomed. 2006, 10, 156–167. [Google Scholar] [CrossRef] [PubMed]
- Karl, M.; Soelch, M.; Bayer, J.; van der Smagt, P. Deep variational bayes filters: Unsupervised learning of state space models from raw data. arXiv 2016, arXiv:1605.06432. [Google Scholar]
- Haykin, S. Neural Networks: A Comprehensive Foundation; Prentice Hall: Upper Saddle River, NJ, USA, 1994. [Google Scholar]
- Bishop, C.M. Mixture Density Networks; Technical Report NCRG/4288; Aston University: Birmingham, UK, 1994. [Google Scholar]
- Murphy, K.P. Machine Learning: A Probabilistic Perspective; MIT Press: Cambridge, MA, USA, 2012. [Google Scholar]
- Fox, C.W.; Roberts, S.J. A tutorial on variational Bayesian inference. Artif. Intell. Rev. 2012, 38, 85–95. [Google Scholar] [CrossRef]
- Schmidt, F.; Hofmann, T. Deep State Space Models for Unconditional Word Generation. In Advances in Neural Information Processing Systems; Neural Information Processing Systems Foundation, Inc.: San Diego, CA, USA, 2018; pp. 6161–6171. [Google Scholar]
- Cho, K.; Van Merriënboer, B.; Bahdanau, D.; Bengio, Y. On the properties of neural machine translation: Encoder-decoder approaches. arXiv 2014, arXiv:1409.1259. [Google Scholar]
- Kullback, S.; Leibler, R.A. On information and sufficiency. Ann. Math. Stat. 1951, 22, 79–86. [Google Scholar] [CrossRef]
- Brown, R.G.; Hwang, P.Y. Introduction to Random Signals and Applied Kalman Filtering; Wiley: New York, NY, USA, 1992; Volume 3. [Google Scholar]
- Kim, P. Kalman Filter for Beginners: With MATLAB Examples; CreateSpace: Scotts Valley, CA, USA, 2011. [Google Scholar]
- MATLAB 2019a; The MathWorks, Inc.: Natick, MA, USA, 2019.
- Paszke, A.; Gross, S.; Chintala, S.; Chanan, G.; Yang, E.; DeVito, Z.; Lin, Z.; Desmaison, A.; Antiga, L.; Lerer, A. Automatic Differentiation in PyTorch. In Proceedings of the NIPS 2017 Autodiff Workshop, Long Beach, CA, USA, 9 December 2017. [Google Scholar]
- Scikit-learn: Machine Learning in Python. Available online: http://scikit-learn.org/stable/ (accessed on 11 June 2018).
- Ross, D.A.; Lim, J.; Lin, R.S.; Yang, M.H. Incremental learning for robust visual tracking. Int. J. Comput. Vis. 2008, 77, 125–141. [Google Scholar] [CrossRef]
- Matsushima, A.; Yoshida, K.; Genno, H.; Ikeda, S.I. Principal component analysis for ataxic gait using a triaxial accelerometer. J. Neuroeng. Rehabil. 2017, 14, 37. [Google Scholar] [CrossRef] [PubMed]
- Zhu, Q.; Chen, Z.; Soh, Y.C. Smartphone-based human activity recognition in buildings using locality-constrained linear coding. In Proceedings of the 2015 IEEE 10th Conference on Industrial Electronics and Applications (ICIEA), Auckland, New Zealand, 15–17 June 2015; pp. 214–219. [Google Scholar]
- Lemoyne, R.; Mastroianni, T. Implementation of a Smartphone as a Wireless Accelerometer Platform for Quantifying Hemiplegic Gait Disparity in a Functionally Autonomous Context. J. Mech. Med. Biol. 2018, 18, 1850005. [Google Scholar] [CrossRef]
- del Rosario, M.; Redmond, S.; Lovell, N. Tracking the evolution of smartphone sensing for monitoring human movement. Sensors 2015, 15, 18901–18933. [Google Scholar] [CrossRef] [PubMed]
- Shanahan, C.J.; Boonstra, F.; Cofré Lizama, L.E.; Strik, M.; Moffat, B.A.; Khan, F.; Kilpatrick, T.J.; van der Walt, A.; Galea, M.P.; Kolbe, S.C.; et al. Technologies for advanced gait and balance assessments in people with multiple sclerosis. Front. Neurol. 2018, 8, 708. [Google Scholar] [CrossRef] [PubMed]
- Hunter, J.D. Matplotlib: A 2D graphics environment. Comput. Sci. Eng. 2007, 9, 90–95. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1: Obtain the training data for each category of motions (walking or running), and for each subject. |
| 2: Obtain the test data for each category of motions (walking or running), and for each subject. |
| 3: Train the first stage of TS-LDMF, and fix its transition and emitter networks after the training is completed. |
| 4: Train the second stage of TS-LDMF, and fix its combiner network after the training is completed. |
| 5: Find latent trajectories corresponding to the training and test data for each category of motions (walking or running), and for each subject. |
| 6: Validity check: If the the obtained latent trajectories are not satisfactory, repeat the the above steps until satisfactory. |
| 7: Report TS-LDMF results (i.e., the transition, emitter, and combiner networks), and the latent trajectories for each class of motions (walking or running) and for each subject. |
| Notation | Meaning |
|---|---|
| Angular velocities around the -directions, respectively | |
| Square root of the sum of squares of angular velocities, | |
| Accelerations along the -directions, respectively | |
| Square root of the sum of squares of accelerations, |
| Subjects | Gender | Age (yrs) | Height (cm) | Weight (kg) |
|---|---|---|---|---|
| subject 1 | Male | 35 | 174 | 62 |
| subject 2 | Male | 25 | 175 | 80 |
| subject 3 | Male | 26 | 167 | 56 |
| subject 4 | Male | 28 | 185 | 84 |
| subject 5 | Male | 58 | 172 | 64 |
| subject 6 | Male | 37 | 170 | 70 |
| subject 7 | Male | 49 | 165 | 85 |
| subject 8 | Male | 28 | 181 | 100 |
| subject 9 | Male | 31 | 170 | 80 |
| subject 10 | Male | 59 | 172 | 67 |
| subject 11 | Female | 29 | 163 | 58 |
| subject 12 | Female | 47 | 167 | 58 |
| subject 13 | Female | 56 | 158 | 63 |
| subject 14 | Female | 36 | 153 | 47 |
| subject 15 | Female | 23 | 163 | 55 |
| subject 16 | Female | 22 | 160 | 48 |
| subject 17 | Female | 21 | 159 | 54 |
| subject 18 | Female | 21 | 165 | 48 |
| subject 19 | Female | 24 | 163 | 68 |
| subject 20 | Female | 22 | 161 | 52 |
| Average | – | 33.85 | 167.15 | 64.95 |
| 2-dim, walk | 2-dim, run | 3-dim, walk | 3-dim, run | |
|---|---|---|---|---|
| Male subjects | 1.01 | 1.75 | 1.21 | 1.60 |
| Female subjects | 1.33 | 1.69 | 1.36 | 1.51 |
| Average | 1.17 | 1.72 | 1.29 | 1.56 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, J.; Lee, J.; Jang, W.; Lee, S.; Kim, H.; Park, J. Two-Stage Latent Dynamics Modeling and Filtering for Characterizing Individual Walking and Running Patterns with Smartphone Sensors. Sensors 2019, 19, 2712. https://doi.org/10.3390/s19122712
Kim J, Lee J, Jang W, Lee S, Kim H, Park J. Two-Stage Latent Dynamics Modeling and Filtering for Characterizing Individual Walking and Running Patterns with Smartphone Sensors. Sensors. 2019; 19(12):2712. https://doi.org/10.3390/s19122712
Chicago/Turabian StyleKim, Jaein, Juwon Lee, Woongjin Jang, Seri Lee, Hongjoong Kim, and Jooyoung Park. 2019. "Two-Stage Latent Dynamics Modeling and Filtering for Characterizing Individual Walking and Running Patterns with Smartphone Sensors" Sensors 19, no. 12: 2712. https://doi.org/10.3390/s19122712
APA StyleKim, J., Lee, J., Jang, W., Lee, S., Kim, H., & Park, J. (2019). Two-Stage Latent Dynamics Modeling and Filtering for Characterizing Individual Walking and Running Patterns with Smartphone Sensors. Sensors, 19(12), 2712. https://doi.org/10.3390/s19122712