Robust Non-Rigid Feature Matching for Image Registration Using Geometry Preserving



Abstract
:1. Introduction
2. Problem Formulation
3. EM for the Proposed Method
- (1).
- (2).
3.1. E-Step
3.2. M-Step
| Algorithm 1: The proposed non-rigid feature-based image registration algorithm |
Require: The feature point and , parameters w, , , and .
Ensure: The aligned point set is The probability of correspondence is given by |
4. Performance Validation
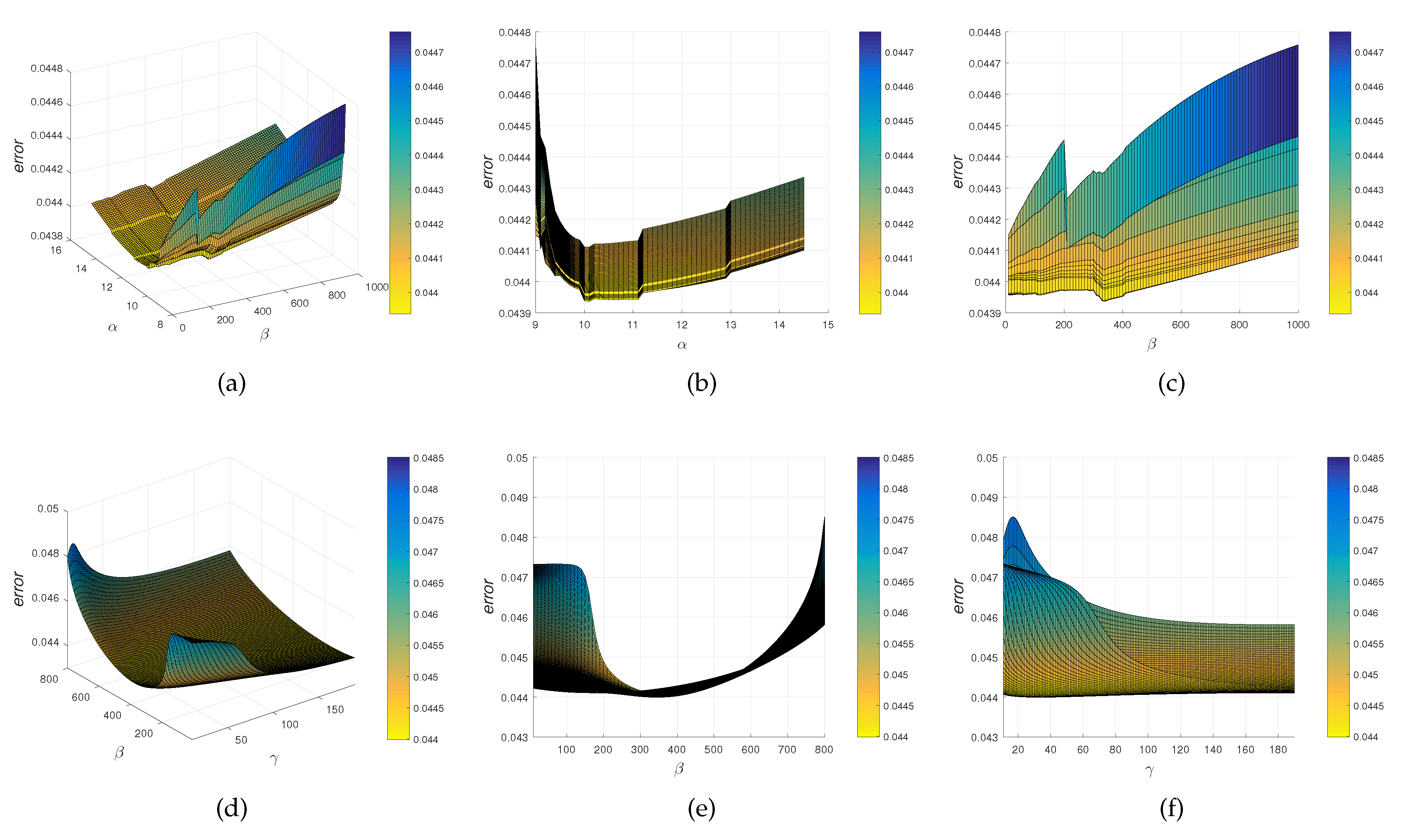
4.1. Parameter Settings
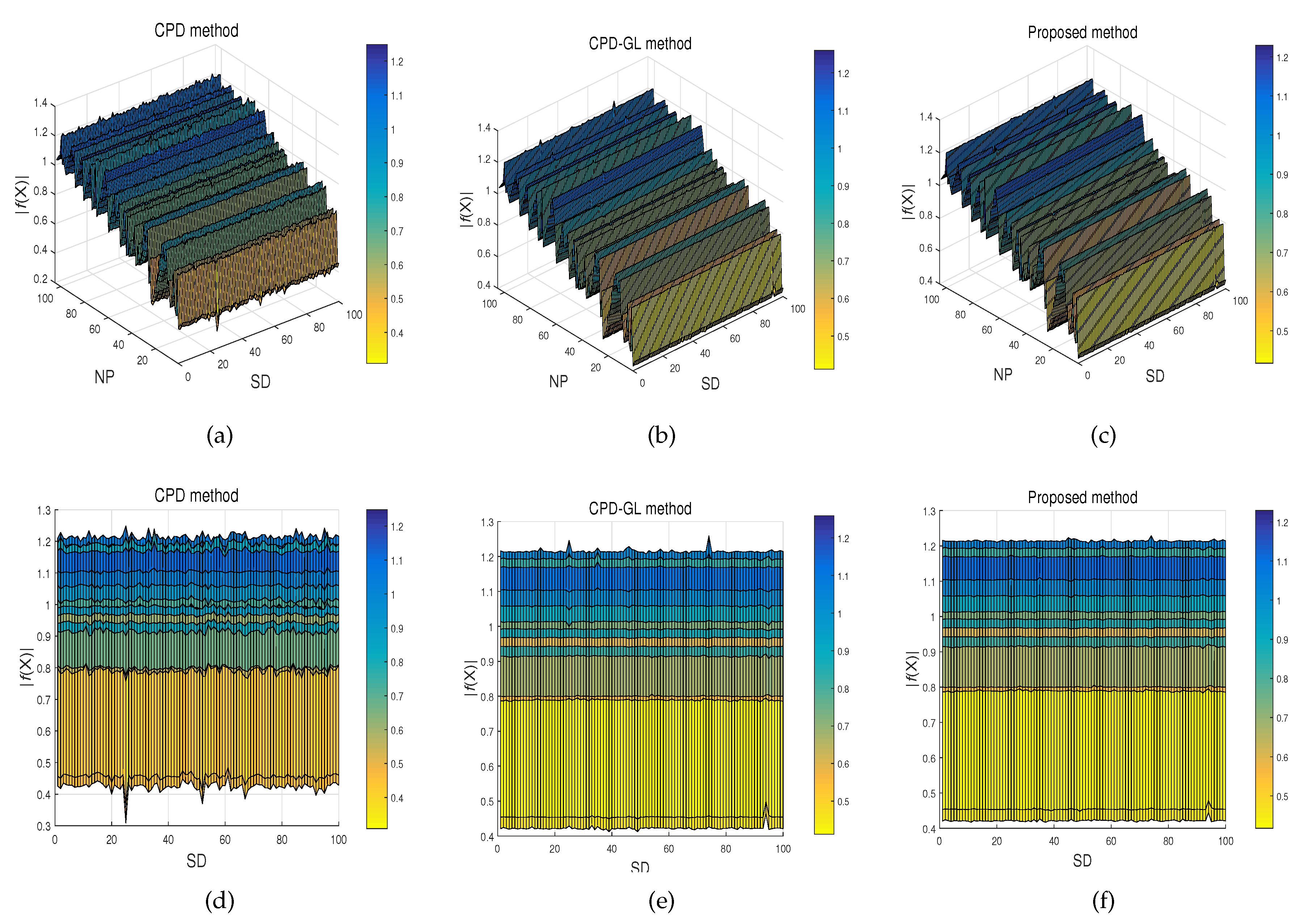
4.2. Synthesized Point Set Registration
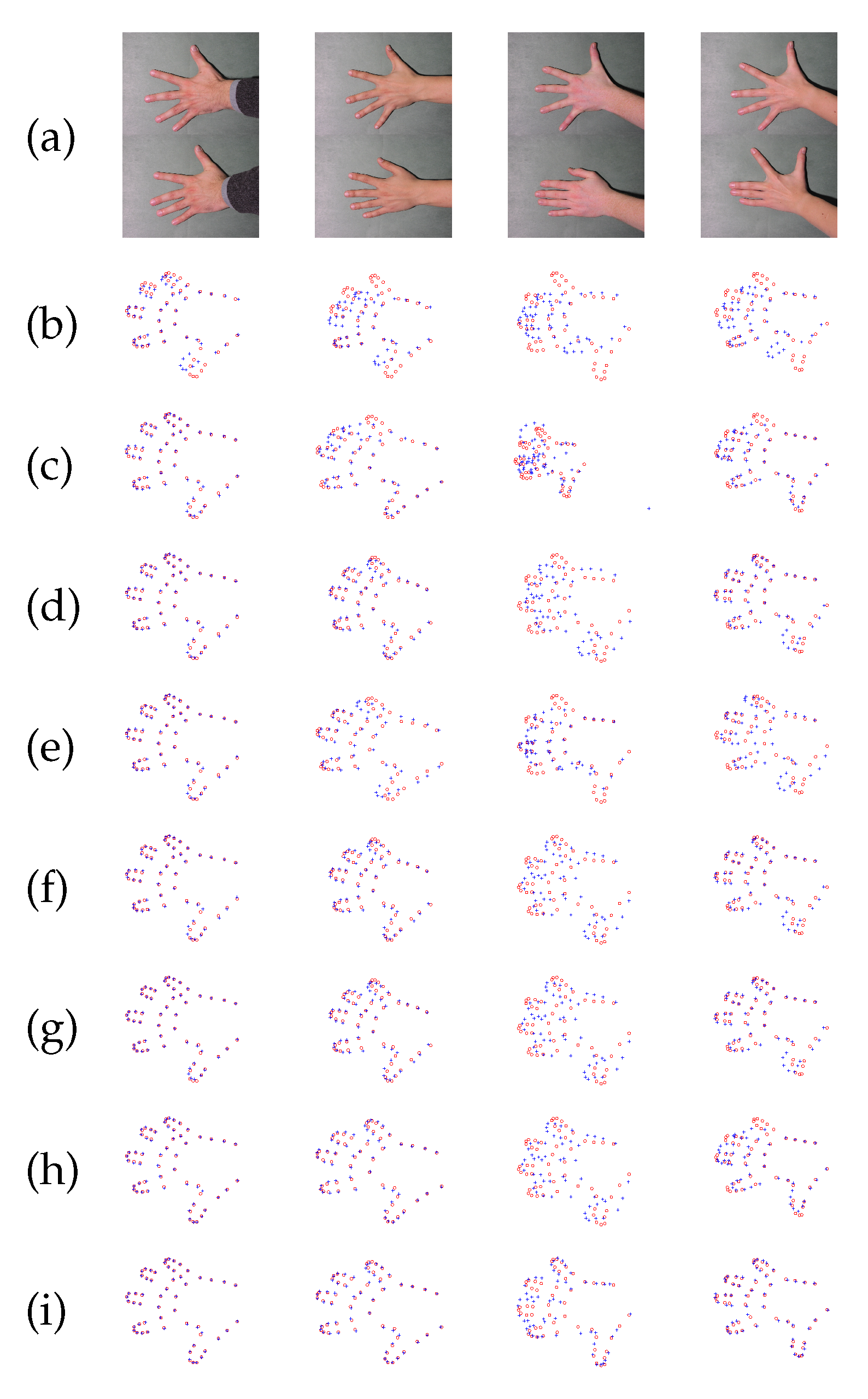
4.3. IMM Hand Landmark Registration
4.4. 4DCT_75 Dataset
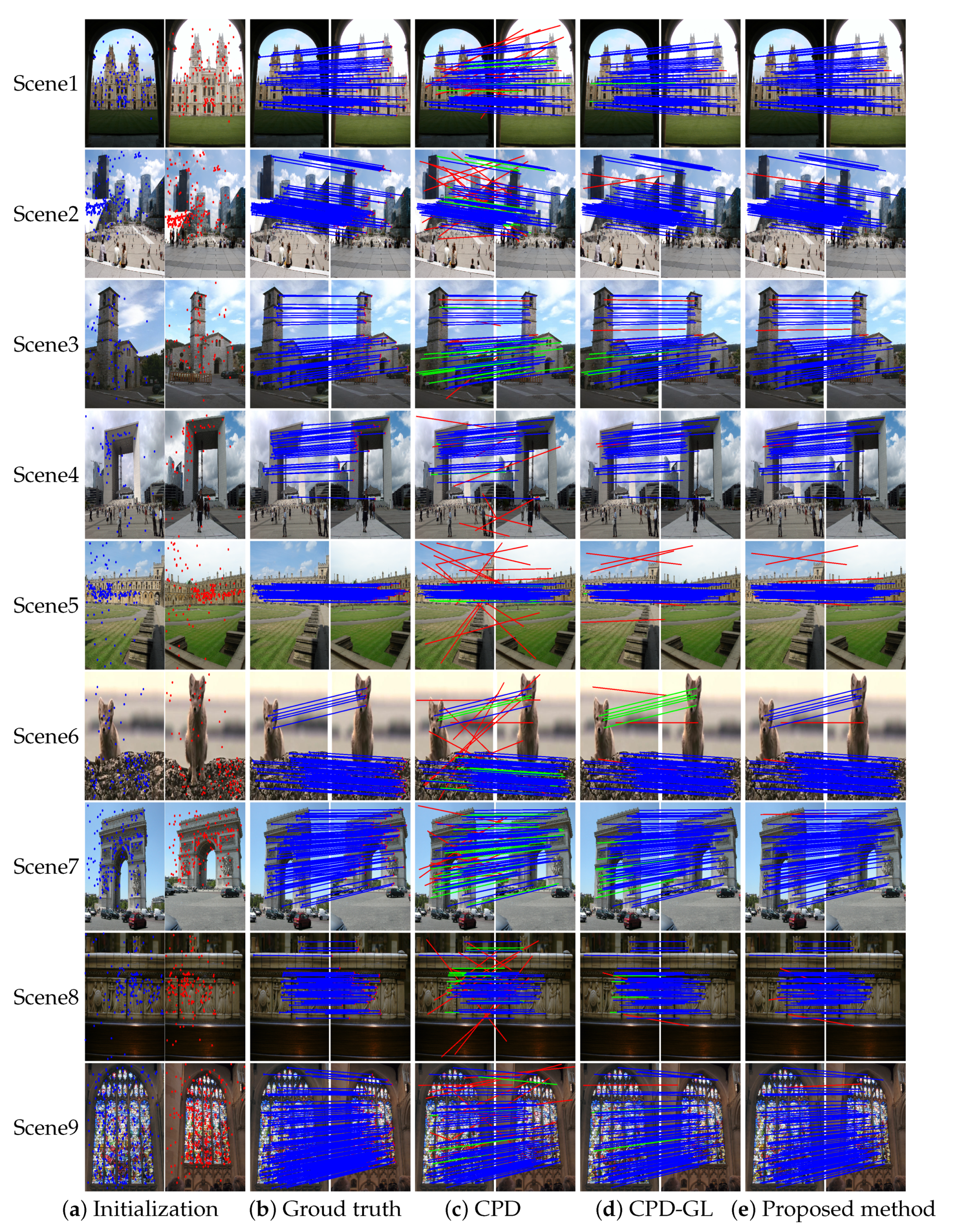
4.5. Real Image Feature Matching
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhu, H.; Li, Y.; Yu, J.; Leung, H.; Li, Y. Ensemble Registration of Multisensor Images by a Variational Bayesian Approach. IEEE Sens. J. 2014, 14, 2698–2705. [Google Scholar] [CrossRef]
- Li, Y.; He, Z.; Zhu, H.; Zhang, W.; Wu, Y. Jointly registering and fusing images from multiple sensors. Inf. Fusion 2016, 27, 85–94. [Google Scholar] [CrossRef]
- Zhu, H.; Yuen, K.V.; Mihaylova, L.; Leung, H. Overview of Environment Perception for Intelligent Vehicles. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2584–2601. [Google Scholar] [CrossRef]
- Li, Y.; Tang, C.; Peeta, S.; Wang, Y. Nonlinear Consensus-Based Connected Vehicle Platoon Control Incorporating Car-Following Interactions and Heterogeneous Time Delays. IEEE Trans. Intell. Transp. Syst. 2019, 20, 2209–2219. [Google Scholar] [CrossRef]
- Gonzalez, R.; Woods, R.E. Digital Image Processing, 2nd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Moigne, J.L.; Campbell, W.J.; Cromp, R.F. An automated parallel image registration technique based on the correlation of wavelet features. IEEE Trans. Geosci. Remote Sens. 2002, 40, 1849–1864. [Google Scholar] [CrossRef]
- Dong, Y.; Long, T.; Jiao, W.; He, G.; Zhang, Z. A Novel Image Registration Method Based on Phase Correlation Using Low-Rank Matrix Factorization With Mixture of Gaussian. IEEE Trans. Geosci. Remote Sens. 2017, 56, 446–460. [Google Scholar] [CrossRef]
- Tagare, H.D.; Rao, M. Why Does Mutual-Information Work for Image Registration? A Deterministic Explanation. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 1286–1296. [Google Scholar] [CrossRef]
- Zitova, B.; Flusser, J. Image registration methods: A survey. Image Vis. Comput. 2003, 21, 977–1000. [Google Scholar] [CrossRef]
- Wu, Y.; Ma, W.; Gong, M.; Su, L.; Jiao, L. A Novel Point-Matching Algorithm Based on Fast Sample Consensus for Image Registration. IEEE Geosci. Remote Sens. Lett. 2015, 12, 43–47. [Google Scholar] [CrossRef]
- Liu, H.; Yan, S. Common visual pattern discovery via spatially coherent correspondences. In Proceedings of the 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 13–18 June 2010; pp. 1609–1616. [Google Scholar]
- Ma, J.; Ma, Y.; Zhao, J.; Tian, J. Image Feature Matching via Progressive Vector Field Consensus. IEEE Signal Process. Lett. 2015, 22, 767–771. [Google Scholar] [CrossRef]
- Zhu, H.; Guo, B.; Zou, K.; Li, Y.; Yuen, K.V.; Mihaylova, L.; Leung, H. A Review of Point Set Registration: From Pairwise Registration to Groupwise Registration. Sensors 2019, 19, 1191. [Google Scholar] [CrossRef]
- Besl, P.J.; McKay, N.D. A method for registration of 3-D shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Yang, J.; Li, H.; Campbell, D.; Jia, Y. Go-ICP: A Globally Optimal Solution to 3D ICP Point-Set Registration. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 38, 2241–2254. [Google Scholar] [CrossRef] [PubMed]
- Chui, H.; Rangarajan, A. A new point matching algorithm for non-rigid registration. Comput. Vis. Image Underst. 2003, 89, 114–141. [Google Scholar] [CrossRef]
- Tustison, N.J.; Awate, S.P.; Song, G.; Cook, T.S.; Gee, J.C. Point Set Registration Using Havrda-Charvat-Tsallis Entropy Measures. IEEE Trans. Med. Imaging 2011, 30, 451–460. [Google Scholar] [CrossRef] [PubMed]
- Myronenko, A.; Song, X. Point Set Registration: Coherent Point Drift. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 32, 2262–2275. [Google Scholar] [CrossRef]
- Wang, F.; Vemuri, B.C.; Rangarajan, A.; Eisenschenk, S.J. Simultaneous Nonrigid Registration of Multiple Point Sets and Atlas Construction. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 30, 2011–2022. [Google Scholar] [CrossRef]
- Jian, B.; Vemuri, B.C. Robust Point Set Registration Using Gaussian Mixture Models. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 33, 1633–1645. [Google Scholar] [CrossRef]
- Ge, S.; Fan, G.; Ding, M. Non-rigid Point Set Registration with Global-Local Topology Preservation. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition Workshops, Columbus, OH, USA, 23–28 June 2014; pp. 245–251. [Google Scholar]
- Ma, J.; Zhou, H.; Zhao, J.; Gao, Y.; Jiang, J.; Tian, J. Robust Feature Matching for Remote Sensing Image Registration via Locally Linear Transforming. IEEE Trans. Geosci. Remote Sens. 2015, 53, 6469–6481. [Google Scholar] [CrossRef]
- Bai, L.; Yang, X.; Gao, H. Nonrigid Point Set Registration by Preserving Local Connectivity. IEEE Trans. Cybern. 2018, 48, 826–835. [Google Scholar] [CrossRef]
- Zhang, S.; Yang, K.; Yang, Y.; Luo, Y.; Wei, Z. Non-rigid point set registration using dual-feature finite mixture model and global-local structural preservation. Pattern Recognit. 2018, 80, 183–195. [Google Scholar] [CrossRef]
- Horaud, R.; Forbes, F.; Yguel, M.; Dewaele, G.; Zhang, J. Rigid and articulated point registration with expectation conditional maximization. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 33, 587–602. [Google Scholar] [CrossRef]
- Nguyen, T.M.; Wu, Q.M.J. Multiple Kernel Point Set Registration. IEEE Trans. Med. Imaging 2016, 35, 1381–1394. [Google Scholar] [CrossRef]
- Zhou, Z.; Zheng, J.; Dai, Y.; Zhou, Z.; Chen, S. Robust Non-Rigid Point Set Registration Using Student’s-t Mixture Model. PLoS ONE 2014, 9, e91381. [Google Scholar] [CrossRef]
- Salve, S.G.; Jondhale, K.C. Shape matching and object recognition using shape contexts. In Proceedings of the 2010 3rd International Conference on Computer Science and Information Technology, Chengdu, China, 9–11 July 2010; Volume 9, pp. 471–474. [Google Scholar]
- Rusu, R.B.; Blodow, N.; Beetz, M. Fast Point Feature Histograms (FPFH) for 3D registration. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 3212–3217. [Google Scholar]
- Zhang, Z. Iterative point matching for registration of free-form curves and surfaces. Int. J. Comput. Vis. 1994, 13, 119–152. [Google Scholar] [CrossRef]
- Ma, J.; Zhao, J.; Yuille, A.L. Non-Rigid Point Set Registration by Preserving Global and Local Structures. IEEE Trans. Image Process. 2016, 25, 53–64. [Google Scholar]
- Tuytelaars, T.; Gool, L.V. Matching widely separated views based on affine invariant regions. Int. J. Comput. Vis. 2004, 59, 61–85. [Google Scholar] [CrossRef]
- Zhu, H.; Wang, M.; Yuen, K.; Leung, H. Track-to-Track Association by Coherent Point Drift. IEEE Signal Process. Lett. 2017, 24, 643–647. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Fish | Chinese | IMM Hand |
|---|---|---|---|
| ICP | 0.4896s | 0.3343s | 0.1283s |
| TPS | 2.3457s | 1.6755s | 0.6231s |
| CPD | 0.1853 | 0.1278s | 0.0954s |
| CPD-GL | 2.2667s | 1.4249s | 0.3449s |
| Proposed method | 2.4665s | 1.7751s | 0.4624s |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, H.; Zou, K.; Li, Y.; Cen, M.; Mihaylova, L. Robust Non-Rigid Feature Matching for Image Registration Using Geometry Preserving. Sensors 2019, 19, 2729. https://doi.org/10.3390/s19122729
Zhu H, Zou K, Li Y, Cen M, Mihaylova L. Robust Non-Rigid Feature Matching for Image Registration Using Geometry Preserving. Sensors. 2019; 19(12):2729. https://doi.org/10.3390/s19122729
Chicago/Turabian StyleZhu, Hao, Ke Zou, Yongfu Li, Ming Cen, and Lyudmila Mihaylova. 2019. "Robust Non-Rigid Feature Matching for Image Registration Using Geometry Preserving" Sensors 19, no. 12: 2729. https://doi.org/10.3390/s19122729
APA StyleZhu, H., Zou, K., Li, Y., Cen, M., & Mihaylova, L. (2019). Robust Non-Rigid Feature Matching for Image Registration Using Geometry Preserving. Sensors, 19(12), 2729. https://doi.org/10.3390/s19122729