A Dark Target Detection Method Based on the Adjacency Effect: A Case Study on Crack Detection


Abstract
:1. Introduction
2. Materials and Methods
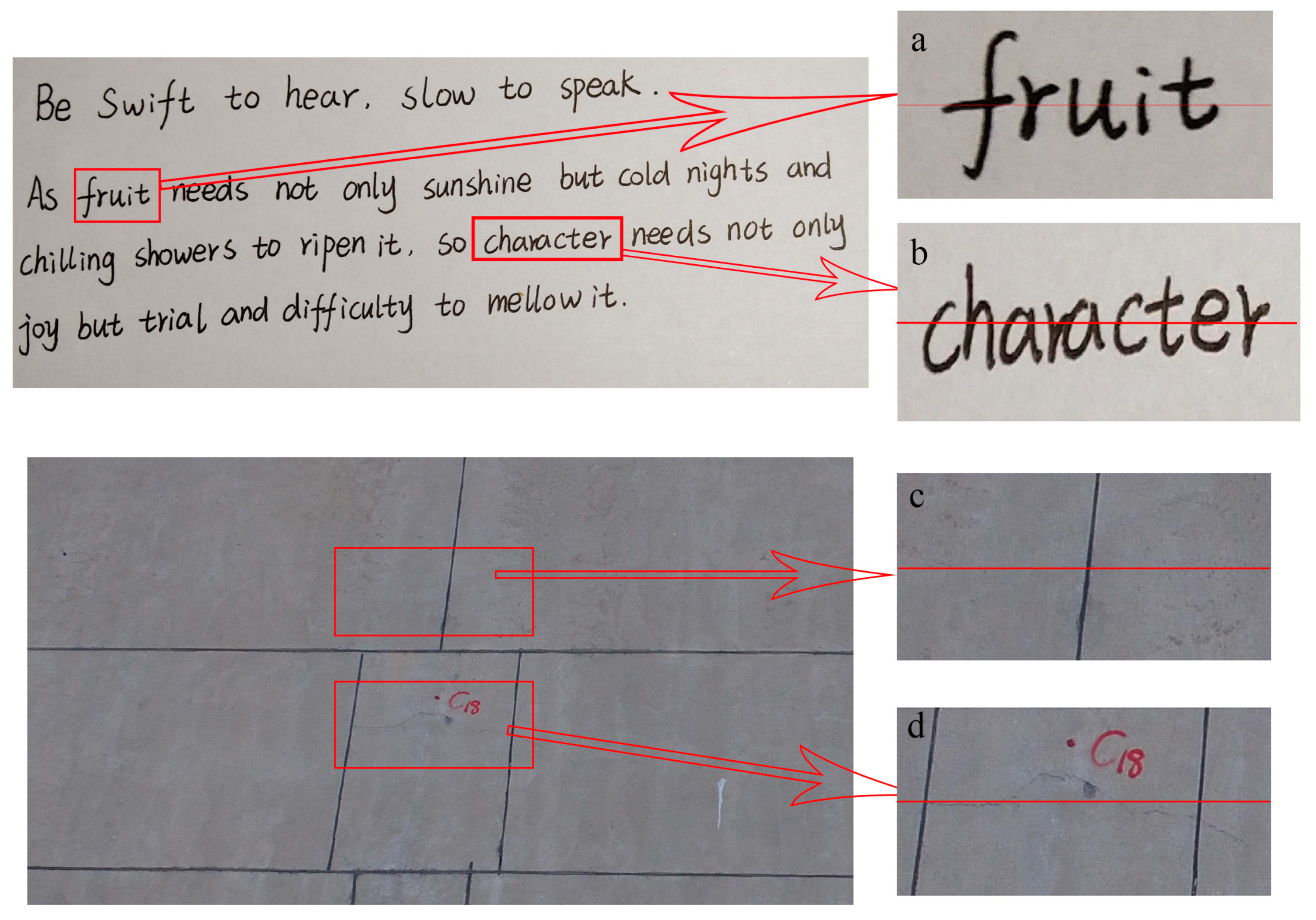
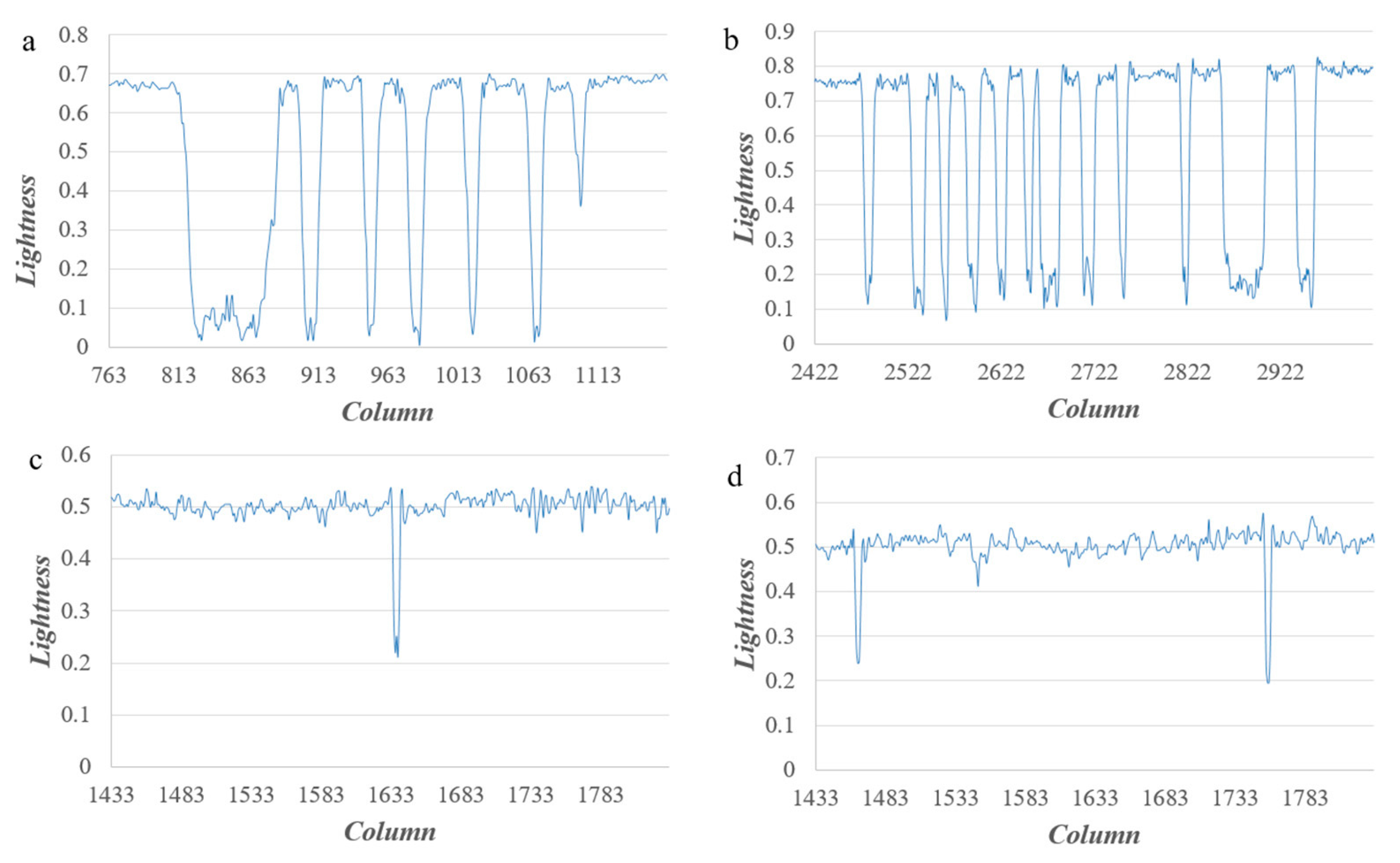
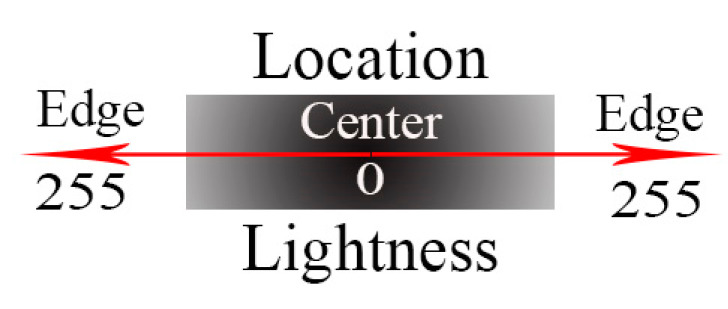
2.1. Characteristics of the Adjacency Effect
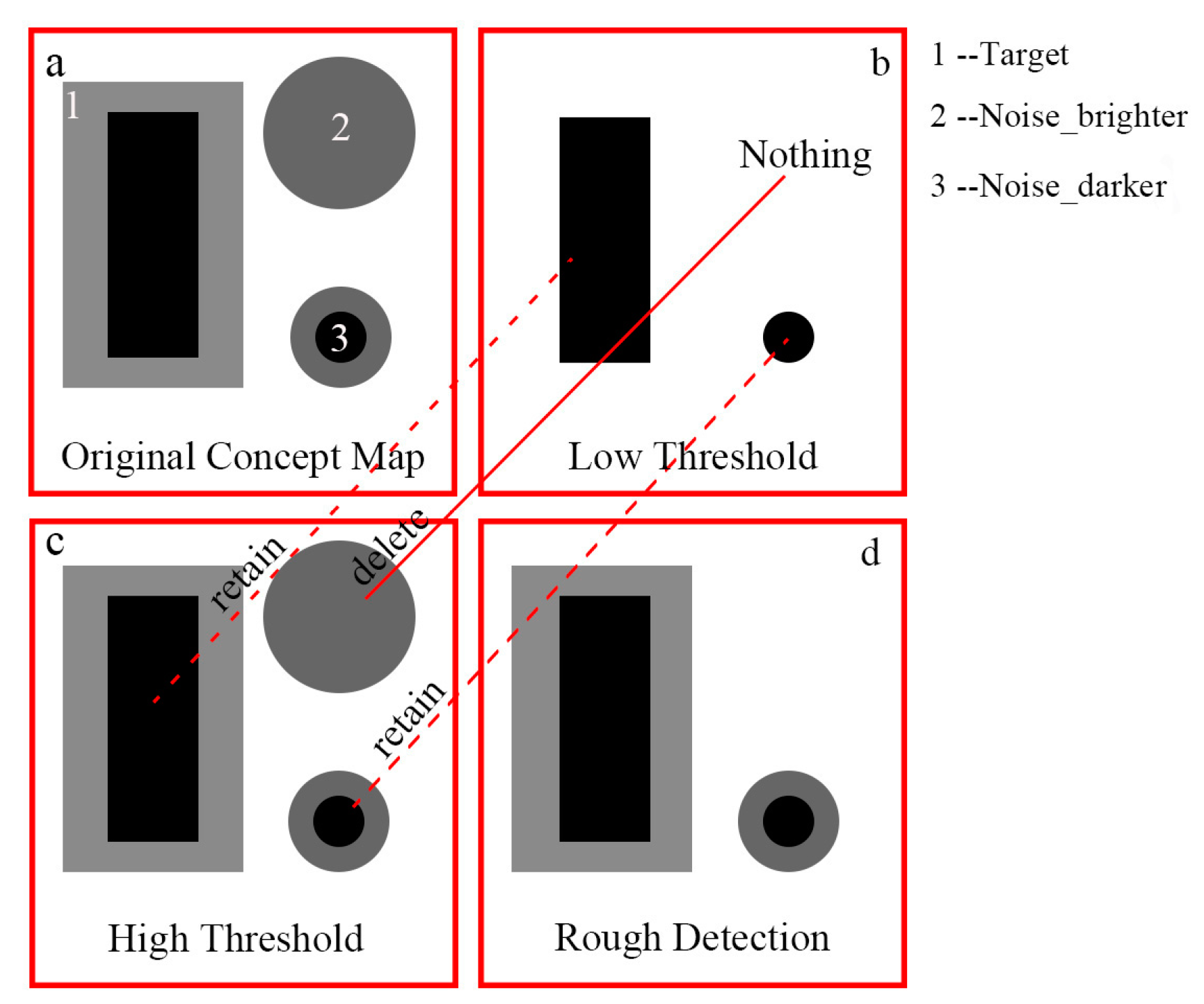
2.2. Low-High Threshold Detection Strategy
2.3. Low-High Threshold Selection
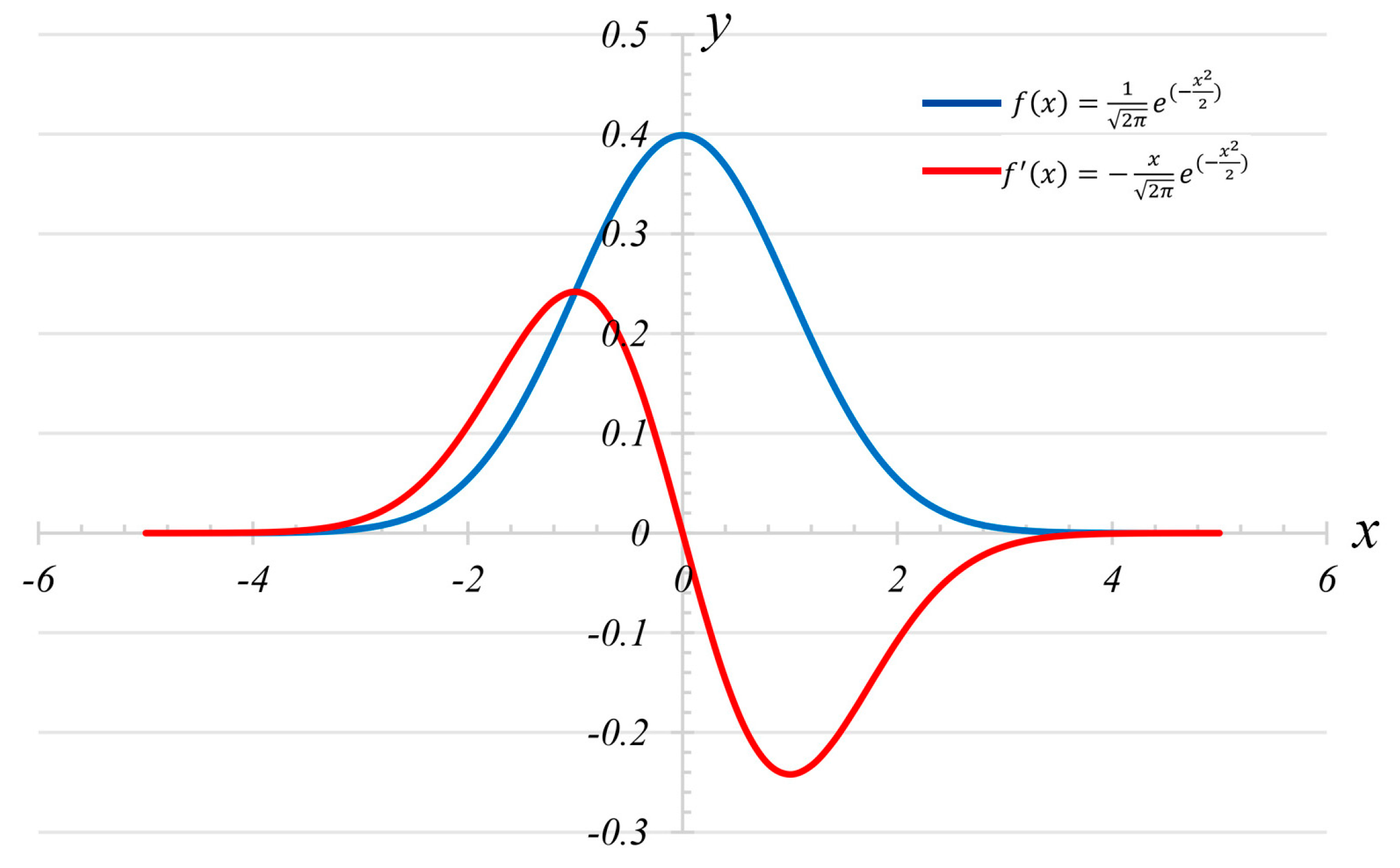
2.3.1. The Characteristic of Gaussian Probability Density Function
2.3.2. Low-High Threshold Selection
2.3.3. Spatial Resolution of Data
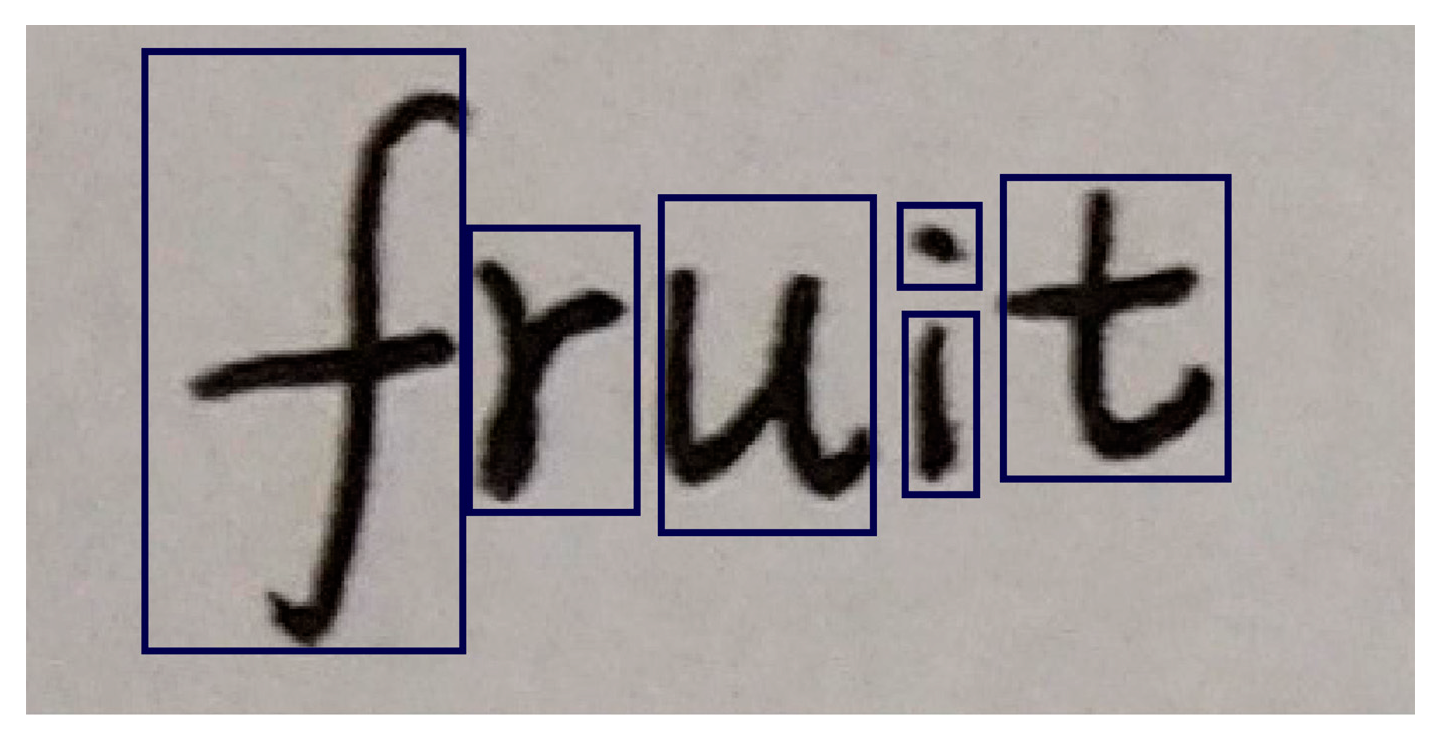
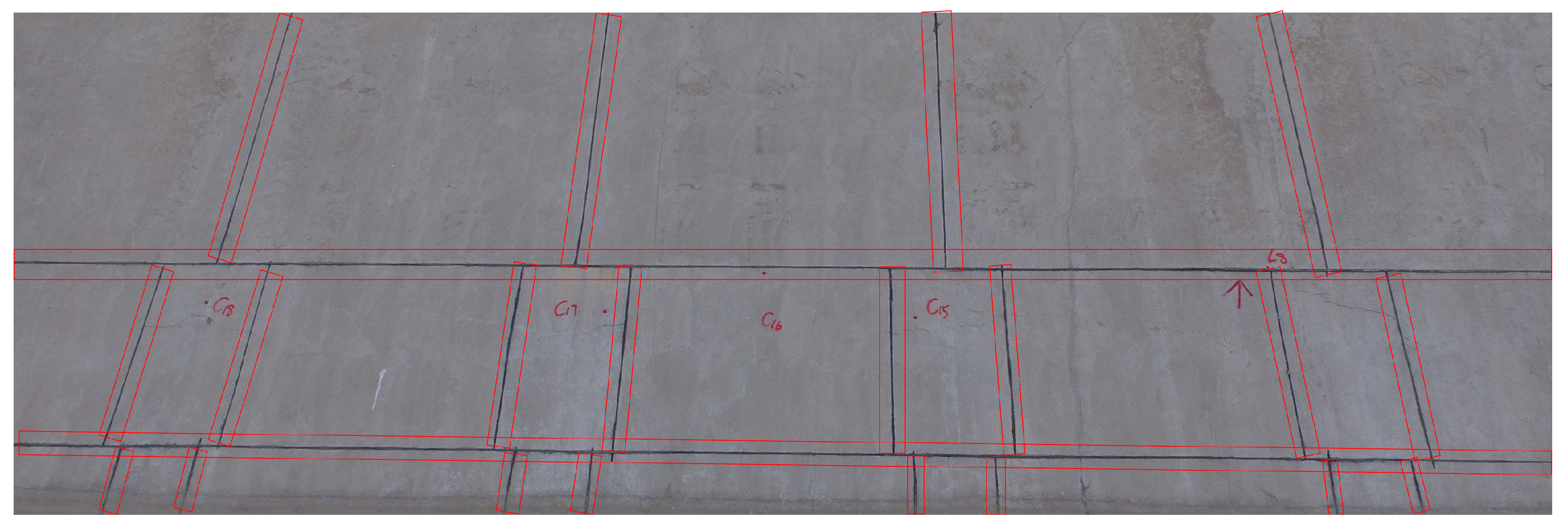
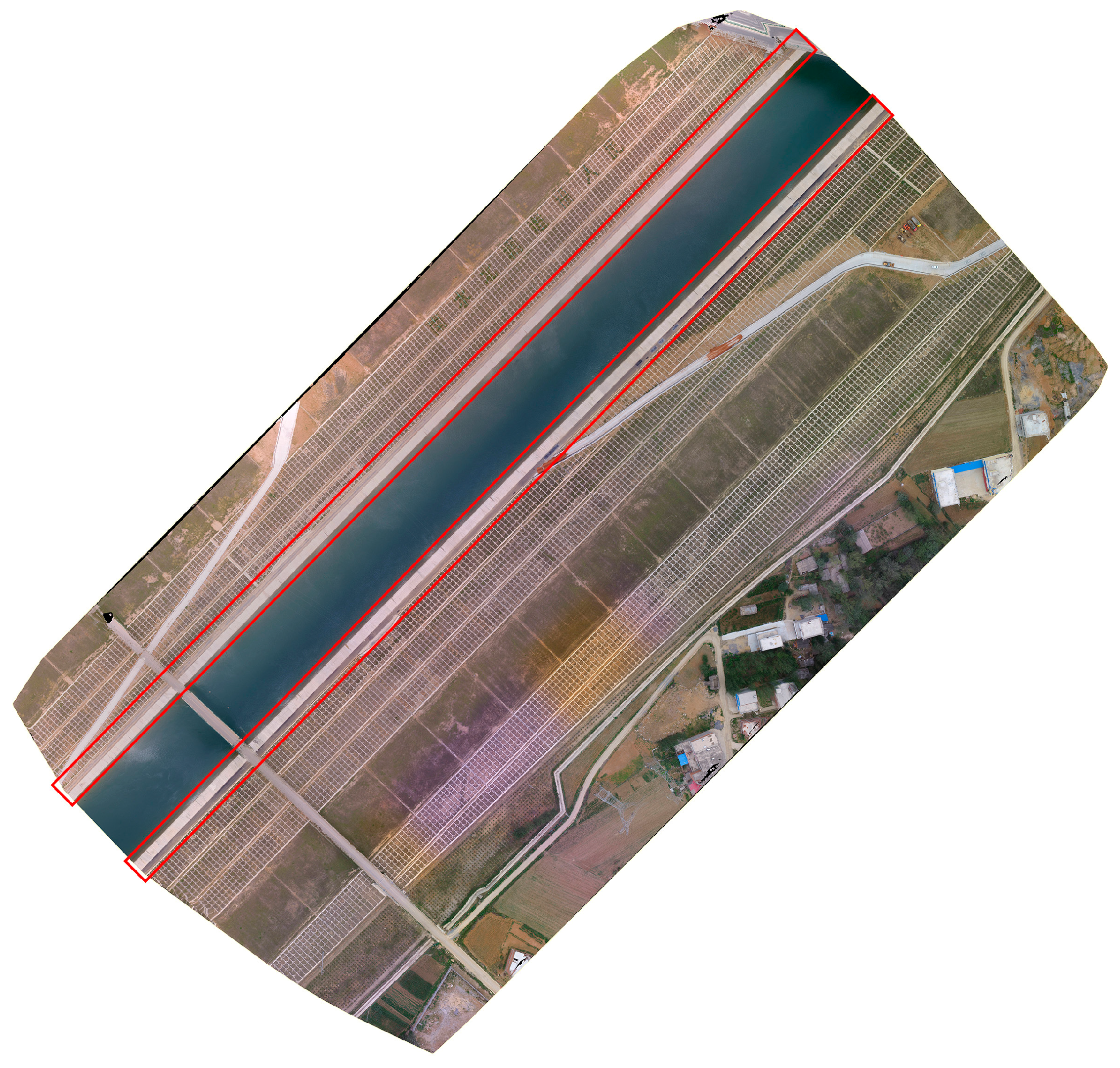
3. An Application in Crack (Expansion Joint) Detection
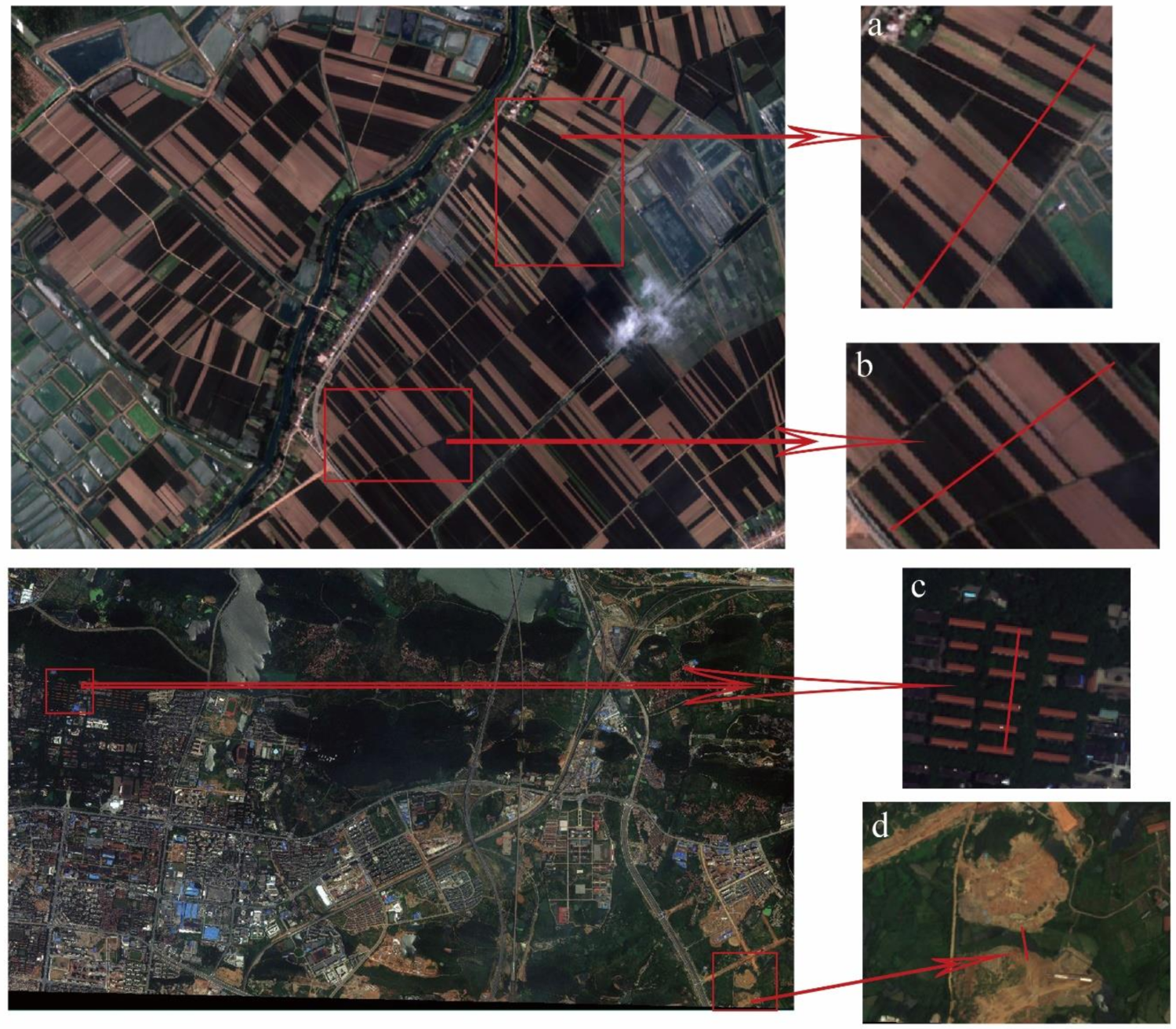
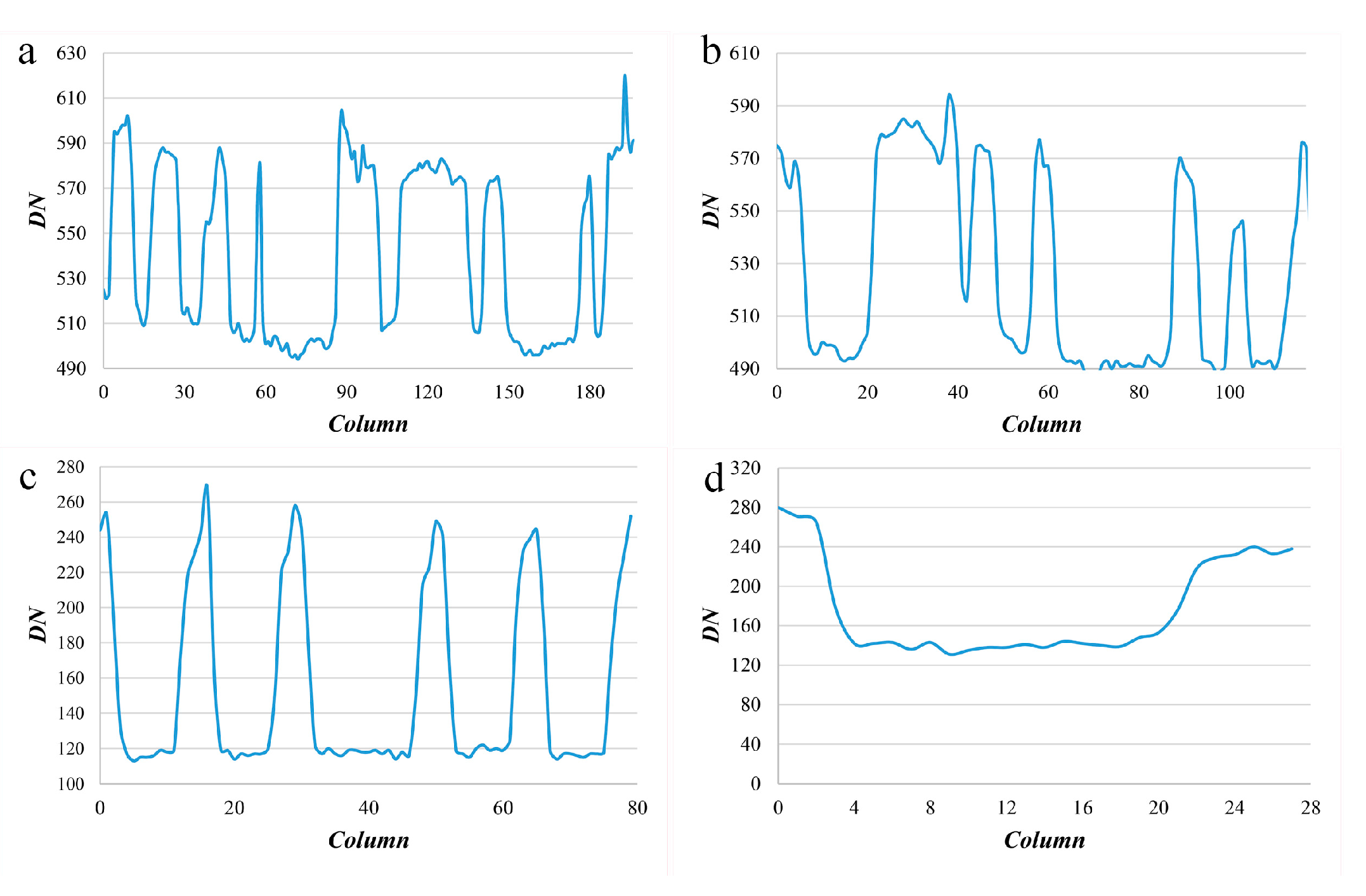
3.1. Data Selection and Introduction
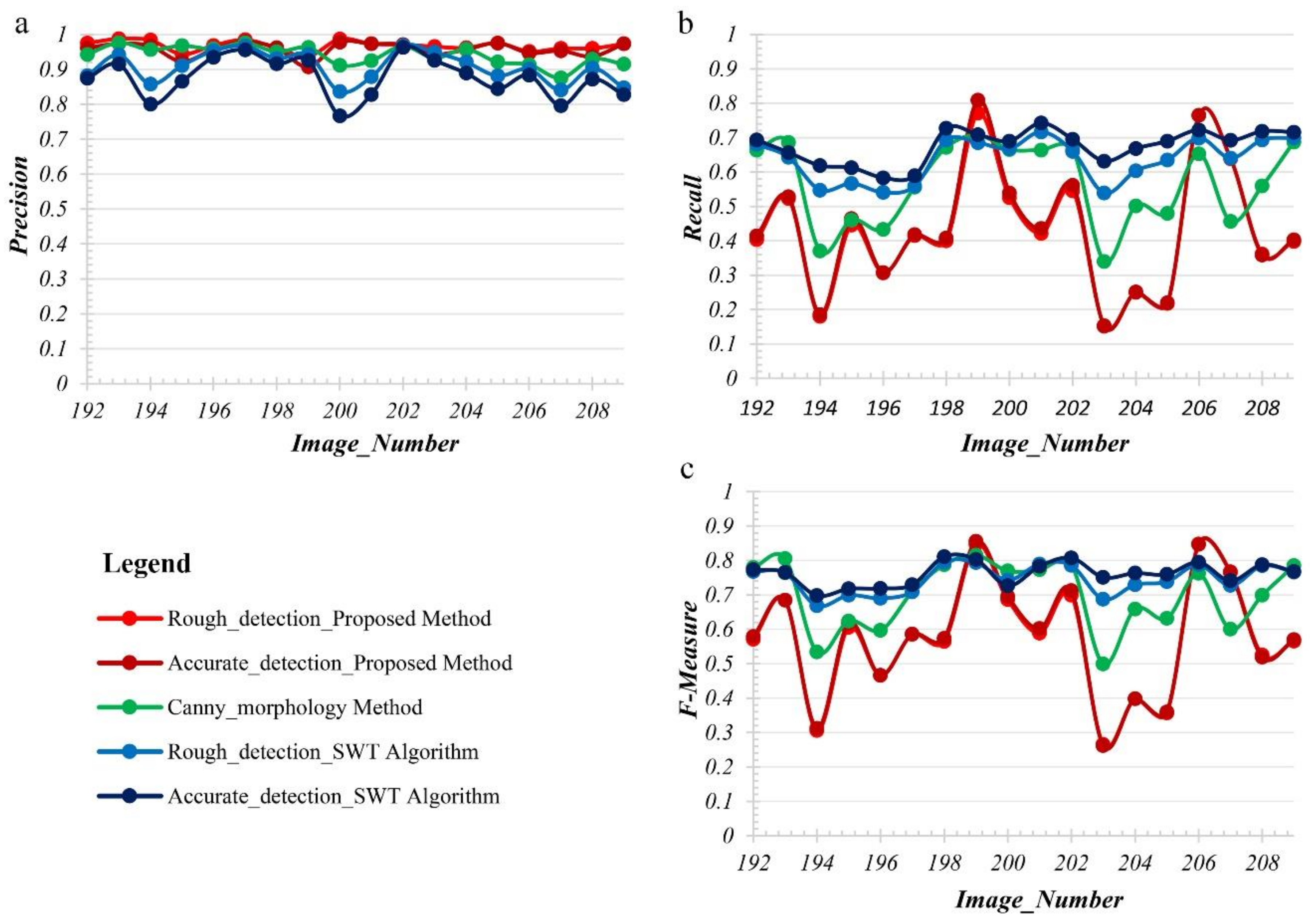
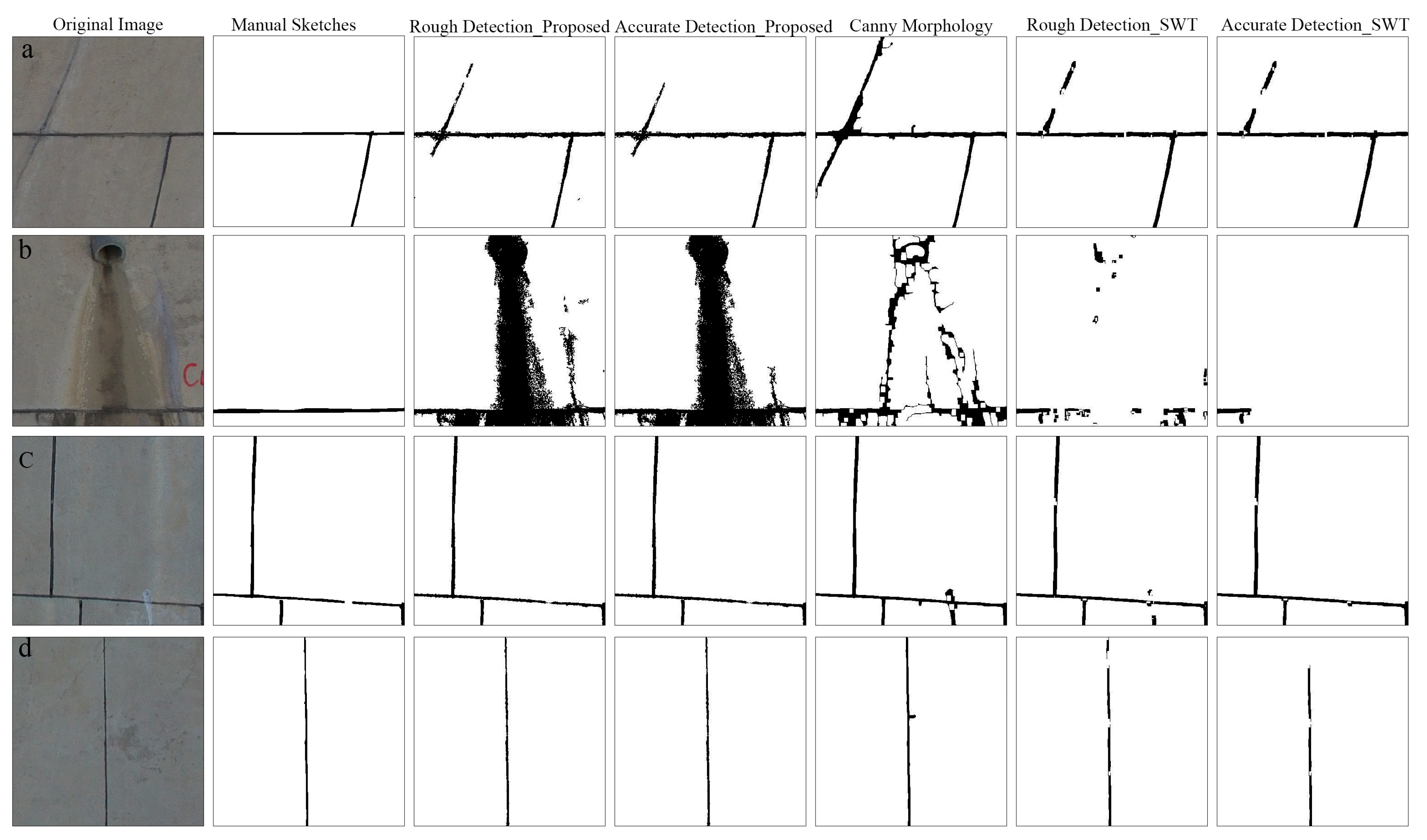
3.2. Result and Analysis
4. Conclusions and Discussion
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Talab, A.M.A.; Huang, Z.; Xi, F.; Liu, H. Detection crack in image using Otsu method and multiple filtering in image processing techniques. Optik 2016, 127, 1030–1033. [Google Scholar] [CrossRef]
- Sim, K.S.; Kho, Y.Y.; Tso, C.P.; Nia, M.E.; Ting, H.Y. A Contrast Stretching Bilateral Closing Top-Hat Otsu Threshold Technique for Crack Detection in Images. Scanning 2013, 35, 75–87. [Google Scholar] [CrossRef] [PubMed]
- Qin, J.; Shen, X.; Mei, F.; Fang, Z. An Otsu multi-thresholds segmentation algorithm based on improved ACO. J. Supercomput. 2019, 75, 955–967. [Google Scholar] [CrossRef]
- Merzban, M.H.; Elbayoumi, M. Efficient solution of Otsu multilevel image thresholding: A comparative study. Expert Syst. Appl. 2019, 116, 299–309. [Google Scholar] [CrossRef]
- He, S.; Schomaker, L. DeepOtsu: Document enhancement and binarization using iterative deep learning. Pattern Recognit. 2019, 91, 379–390. [Google Scholar] [CrossRef] [Green Version]
- Hutchinson, T.C.; Chen, Z. Improved Image Analysis for Evaluating Concrete Damage. J. Comput. Civil Eng. 2006, 20, 210–216. [Google Scholar] [CrossRef]
- Otsu, N. A Threshold Selection Method from Gray-Level Histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef] [Green Version]
- Perez, A.; Gonzalez, R.C. An Iterative Thresholding Algorithm for Image Segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 1987, PAMI-9, 742–751. [Google Scholar] [CrossRef]
- Wagstaff, K. Constrained K-means clustering with background knowledge. In Proceedings of the 18th International Conference on Machine Learning, San Francisco, CA, USA, 28 June–1 July 2001; pp. 577–584. [Google Scholar]
- Suykens, J.A.K.; Vandewalle, J. Least Squares Support Vector Machine Classifiers. Neural Process. Lett. 1999, 9, 293–300. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436. [Google Scholar] [CrossRef]
- Badrinarayanan, V.; Kendall, A.; Cipolla, R. SegNet: A Deep Convolutional Encoder-Decoder Architecture for Image Segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 2481–2495. [Google Scholar] [CrossRef] [PubMed]
- Gao, Y.; Mosalam, K.M. Deep Transfer Learning for Image-Based Structural Damage Recognition. Comput.-Aided Civ. Infrastruct. Eng. 2018, 33, 748–768. [Google Scholar] [CrossRef]
- Khan, M.; Yousaf, A.; Javed, N.; Nadeem, S.; Khurshid, K. Automatic Target Detection in Satellite Images using Deep Learning. J. Space Technol. 2017, 7. [Google Scholar]
- Ng, A.Y.; Jordan, M.I.; Weiss, Y. On spectral clustering: analysis and an algorithm. In Proceedings of the 14th International Conference on Neural Information Processing Systems: Natural and Synthetic, Vancouver, BC, Canada, 3–8 December 20011; pp. 849–856. [Google Scholar]
- Zhou, L.; Lu, Y.; Tan, C.L. Bangla/English Script Identification Based on Analysis of Connected Component Profiles; Springer: Berlin/Heidelberg, Germany, 2006; pp. 243–254. [Google Scholar]
- Comaniciu, D.; Meer, P. Robust analysis of feature spaces: color image segmentation. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Washington, DC, USA, 17–19 June 1997; pp. 750–755. [Google Scholar]
- Grimmett, G. Percolation; Springer: Berlin/Heidelberg, Germany, 1999. [Google Scholar]
- Yamaguchi, T.; Hashimoto, S. Image Processing Based on Percolation Model. IEICE Trans. Inf. Syst. 2006, E89-D, 2044–2052. [Google Scholar] [CrossRef]
- Epshtein, B.; Ofek, E.; Wexler, Y. Detecting text in natural scenes with stroke width transform. In Proceedings of the 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 13–18 June 2010; pp. 2963–2970. [Google Scholar]
- Holben, B.; Vermote, E.; Kaufman, Y.J.; Tanre, D.; Kalb, V. Aerosol retrieval over land from AVHRR data-application for atmospheric correction. IEEE Trans. Geosci. Remote Sens. 1992, 30, 212–222. [Google Scholar] [CrossRef]
- Otterman, J.; Fraser, R.S. Adjacency effects on imaging by surface reflection and atmospheric scattering: cross radiance to zenith. Appl. Opt. 1979, 18, 2852–2860. [Google Scholar] [CrossRef] [PubMed]
- Burazerović, D.; Heylen, R.; Geens, B.; Sterckx, S.; Scheunders, P. Detecting the Adjacency Effect in Hyperspectral Imagery With Spectral Unmixing Techniques. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 1070–1078. [Google Scholar] [CrossRef]
- Lyapustin, A.I.; Kaufman, Y.J. Role of adjacency effect in the remote sensing of aerosol. J. Geophys. Res. Atmos. 2001, 106, 11909–11916. [Google Scholar] [CrossRef] [Green Version]
- Justice, C.O.; Vermote, E.; Townshend, J.R.G.; Defries, R.; Roy, D.P.; Hall, D.K.; Salomonson, V.V.; Privette, J.L.; Riggs, G.; Strahler, A.; et al. The Moderate Resolution Imaging Spectroradiometer (MODIS): land remote sensing for global change research. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1228–1249. [Google Scholar] [CrossRef] [Green Version]
- Richter, R.; Bachmann, M.; Dorigo, W.; Muller, A. Influence of the Adjacency Effect on Ground Reflectance Measurements. IEEE Geosci. Remote Sens. Lett. 2006, 3, 565–569. [Google Scholar] [CrossRef]
- Sei, A. Efficient correction of adjacency effects for high-resolution imagery: integral equations, analytic continuation, and Padé approximants. Appl. Opt. 2015, 54, 3748–3758. [Google Scholar] [CrossRef]
- Jackett, C. Deconvolving and improving the spatial resolution of satellite data using the Maximum Entropy Method. Ph.D. Thesis, University of Tasmania, Tasmania, Australia, 2013. [Google Scholar]
- Borfecchia, F.; Consalvi, N.; Micheli, C.; Carli, F.M.; Cognetti De Martiis, S.; Gnisci, V.; Piermattei, V.; Belmonte, A.; De Cecco, L.; Bonamano, S.; et al. Landsat 8 OLI satellite data for mapping of the Posidonia oceanica and benthic habitats of coastal ecosystems. Int. J. Remote Sens. 2019, 40, 1548–1575. [Google Scholar] [CrossRef]
- DAVE, J. Effect of Atmospheric Conditions on Remote sensing of a Surface Nonhomogeneity. Photogramm. Eng. Remote Sens. 1980, 46, 1173–1180. [Google Scholar]
- Moses, W.J.; Sterckx, S.; Montes, M.J.; De Keukelaere, L.; Knaeps, E. Chapter 3 - Atmospheric Correction for Inland Waters. In Bio-optical Modeling and Remote Sensing of Inland Waters; Mishra, D.R., Ogashawara, I., Gitelson, A.A., Eds.; Elsevier: Amsterdam, The Netherlands, 2017. [Google Scholar]
- Frouin, R.; Deschamps, P.-Y.; Steinmetz, F. Environmental Effects in Ocean Color Remote Sensing; SPIE: San Diego, CA, USA, 2009; Volume 7459. [Google Scholar]
- Singh, S.M. Estimation of multiple reflection and lowest order adjacency effects on remotely-sensed data. Int. J. Remote Sens. 1988, 9, 1433–1450. [Google Scholar] [CrossRef]
- Sterckx, S.; Knaeps, E.; Ruddick, K. Detection and correction of adjacency effects in hyperspectral airborne data of coastal and inland waters: the use of the near infrared similarity spectrum. Int. J. Remote Sens. 2011, 32, 6479–6505. [Google Scholar] [CrossRef]
- Feng, L.; Hu, C. Land adjacency effects on MODIS Aqua top-of-atmosphere radiance in the shortwave infrared: Statistical assessment and correction. J. Geophys. Res. Oceans 2017, 122, 4802–4818. [Google Scholar] [CrossRef]
- Vermote, E.F.; El Saleous, N.Z.; Justice, C.O. Atmospheric correction of MODIS data in the visible to middle infrared: first results. Remote Sens. Environ. 2002, 83, 97–111. [Google Scholar] [CrossRef]
- Semenov, A.A.; Moshkov, A.V.; Pozhidayev, V.N.; Barducci, A.; Marcoionni, P.; Pippi, I. Estimation of Normalized Atmospheric Point Spread Function and Restoration of Remotely Sensed Images. IEEE Trans. Geosci. Remote Sens. 2011, 49, 2623–2634. [Google Scholar] [CrossRef]
- Duan, S.-B.; Li, Z.-L.; Tang, B.-H.; Wu, H.; Tang, R.; Bi, Y. Atmospheric correction of high-spatial-resolution satellite images with adjacency effects: application to EO-1 ALI data. Int. J. Remote Sens. 2015, 36, 5061–5074. [Google Scholar] [CrossRef]
- Diner, D.J.; Martonchik, J.V.; Danielson, E.D.; Bruegge, C.J. Atmospheric Correction of High Resolution Land Surface Images. In Proceedings of the 12th Canadian Symposium on Remote Sensing Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 10–14 July 1989; pp. 860–863. [Google Scholar]
- Minomura, M.; Kuze, H.; Takeuchi, N. Adjacency Effect in the Atmospheric Correction of Satellite Remote Sensing Data: Evaluation of the Influence of Aerosol Extinction Profiles. Opt. Rev. 2001, 8, 133–141. [Google Scholar] [CrossRef]
- Barducci, A.; Pippi, I. Small-angle atmospheric scattering of the light: outline of a theoretical model for adjacency effects on image remote sensing. Satell. Remote Sens. 1994, 2312. [Google Scholar]
- Chami, M.; Lenot, X.; Guillaume, M.; Lafrance, B.; Briottet, X.; Minghelli, A.; Jay, S.; Deville, Y.; Serfaty, V. Analysis and quantification of seabed adjacency effects in the subsurface upward radiance in shallow waters. Opt. Express 2019, 27, A319–A338. [Google Scholar] [CrossRef] [PubMed]
- Sharma, A.R.; Badarinath, K.V.S.; Roy, P.S. Corrections for Atmospheric and Adjacency Effects on High Resolution Sensor Data—A Case Study Using IRS-P6 LISS-IV Data. In Proceedings of the XXIst ISPRS Congress, Beijing, China, 3–11 July 2008; pp. 497–502. [Google Scholar]
- Reinersman, P.N.; Carder, K.L. Monte Carlo simulation of the atmospheric point-spread function with an application to correction for the adjacency effect. Appl. Opt. 1995, 34, 4453–4471. [Google Scholar] [CrossRef] [PubMed]
- Kohei, A. Monte Carlo Ray Tracing Based Adjacency Effect and Nonlinear Mixture Pixel Model for Remote Sensing Satellite Imagery Data Analysis. Int. J. Adv. Res. Artif. Intell. 2013, 2, 56–64. [Google Scholar]
- Sei, A. Analysis of adjacency effects for two Lambertian half-spaces. Int. J. Remote Sens. 2007, 28, 1873–1890. [Google Scholar] [CrossRef]
- Zimovaya, A.V.; Tarasenkov, M.V.; Belov, V.V. Allowance for polarization in passive space sensing of reflective properties of the Earth’S surface. Atmospheric and Oceanic Optics 2016, 29, 171–174. [Google Scholar] [CrossRef]
- Wang, X.; Zhong, Y.; Zhang, L.; Xu, Y. Blind Spectral Unmixing Considering the Adjacent Effect. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 4229–4232. [Google Scholar]
- Vanhellemont, Q. Adaptation of the dark spectrum fitting atmospheric correction for aquatic applications of the Landsat and Sentinel-2 archives. Remote Sens. Environ. 2019, 225, 175–192. [Google Scholar] [CrossRef]
- Schläpfer, D.; Richter, R. Atmospheric correction of imaging spectroscopy data using shadow-based quantification of aerosol scattering effects. In Proceedings of the 37th EARSeL Symposium, Prague, Czech Republic, 21–24 May 2001; pp. 21–28. [Google Scholar]
- Ma, X.S.; Guo, X.Y.; Meng, X.; Yang, Z.; Peng, X.D.; Li, L.G.; Xie, W.M. Simulation and analysis of the adjacency effect in earth-imaging process of the optical remote sensing. Hongwai Yu Haomibo Xuebao 2015, 34, 250–256. [Google Scholar]
- Warren, M.A.; Simis, S.G.H.; Martinez-Vicente, V.; Poser, K.; Bresciani, M.; Alikas, K.; Spyrakos, E.; Giardino, C.; Ansper, A. Assessment of atmospheric correction algorithms for the Sentinel-2A MultiSpectral Imager over coastal and inland waters. Remote Sens. Environ. 2019, 225, 267–289. [Google Scholar] [CrossRef]
- Bulgarelli, B.; Zibordi, G. On the detectability of adjacency effects in ocean color remote sensing of mid-latitude coastal environments by SeaWiFS, MODIS-A, MERIS, OLCI, OLI and MSI. Remote Sens. Environ. 2018, 209, 423–438. [Google Scholar] [CrossRef]
- Bulgarelli, B.; Kiselev, V.; Zibordi, G. Simulation and analysis of adjacency effects in coastal waters: a case study. Appl. Opt. 2014, 53, 1523–1545. [Google Scholar] [CrossRef] [PubMed]
- Zhu, J.; Luo, J.; You, Q.; Smith, J.R. Towards Understanding the Effectiveness of Election Related Images in Social Media. In Proceedings of the 2013 IEEE 13th International Conference on Data Mining Workshops, Dallas, TX, USA, 7–10 December 2013; pp. 421–425. [Google Scholar]
- Gong, C.; Tao, D.; Chang, X.; Yang, J. Ensemble Teaching for Hybrid Label Propagation. IEEE Trans. Cybern. 2019, 49, 388–402. [Google Scholar] [CrossRef] [PubMed]
- Cheng, Z.; Chang, X.; Zhu, L.; Kanjirathinkal, R.C.; Kankanhalli, M. MMALFM: Explainable Recommendation by Leveraging Reviews and Images. ACM Trans. Inf. Syst. 2019, 37, 1–28. [Google Scholar] [CrossRef]
- Chang, X.; Ma, Z.; Yang, Y.; Zeng, Z.; Hauptmann, A.G. Bi-Level Semantic Representation Analysis for Multimedia Event Detection. IEEE Trans. Cybern. 2017, 47, 1180–1197. [Google Scholar] [CrossRef]
- Ives, D.J.; Hayter, J.H.; Oei, M.; Seltze, D.B. System for social media tag extraction. 2016. [Google Scholar]
- Tabassum, A.; Dhondse, S.A. Text Detection Using MSER and Stroke Width Transform. In Proceedings of the 2015 Fifth International Conference on Communication Systems and Network Technologies, Gwalior, India, 4–6 April 2015. [Google Scholar]
- Piriyothinkul, B.; Pasupa, K.; Sugimoto, M. Detecting Text in Manga Using Stroke Width Transform. In Proceedings of the 2019 11th International Conference on Knowledge and Smart Technology (KST), Phuket, Thailand, 23–26 January 2019; pp. 142–147. [Google Scholar]
- Paul, S.; Saha, S.; Basu, S.; Saha, P.K.; Nasipuri, M. Text localization in camera captured images using fuzzy distance transform based adaptive stroke filter. Multimedia Tools Appl. 2019. [Google Scholar] [CrossRef]
- Bosamiya, J.H.; Agrawal, P.; Roy, P.P.; Balasubramanian, R. Script independent scene text segmentation using fast stroke width transform and GrabCut. In Proceedings of the 2015 3rd IAPR Asian Conference on Pattern Recognition (ACPR), Kuala Lumpur, Malaysia, 3–6 November 2015; pp. 151–155. [Google Scholar]
- Mosleh, A.; Bouguila, N.; Ben Hamza, A. Image Text Detection Using a Bandlet-Based Edge Detector and Stroke Width Transform. In Proceedings of the British Machine Vision Conference, Surrey, UK, 3–7 September 2012. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Precision_P | Recall_P | Precision_C | Recall_C | Precision_S | Recall_S |
|---|---|---|---|---|---|---|
| 1 | 0.9612 | 0.4142 | 0.9426 | 0.6639 | 0.8744 | 0.6932 |
| 2 | 0.9740 | 0.5282 | 0.9762 | 0.6860 | 0.9147 | 0.6571 |
| 3 | 0.9667 | 0.1859 | 0.9563 | 0.3704 | 0.8000 | 0.6191 |
| 4 | 0.9225 | 0.4647 | 0.9676 | 0.4599 | 0.8652 | 0.6125 |
| 5 | 0.9571 | 0.3081 | 0.9587 | 0.4330 | 0.9347 | 0.5834 |
| 6 | 0.9787 | 0.4179 | 0.9759 | 0.5560 | 0.9554 | 0.5899 |
| 7 | 0.9614 | 0.4085 | 0.9504 | 0.6718 | 0.9160 | 0.7274 |
| 8 | 0.9073 | 0.8090 | 0.9624 | 0.7075 | 0.9253 | 0.7087 |
| 9 | 0.9777 | 0.5395 | 0.9114 | 0.6656 | 0.7669 | 0.6903 |
| 10 | 0.9733 | 0.4360 | 0.9249 | 0.6641 | 0.8279 | 0.7424 |
| 11 | 0.9710 | 0.5619 | 0.9667 | 0.6641 | 0.9627 | 0.6951 |
| 12 | 0.9434 | 0.1522 | 0.9328 | 0.3403 | 0.9256 | 0.6320 |
| 13 | 0.9567 | 0.2515 | 0.9575 | 0.5020 | 0.8892 | 0.6682 |
| 14 | 0.9754 | 0.2203 | 0.9209 | 0.4805 | 0.8444 | 0.6901 |
| 15 | 0.9471 | 0.7650 | 0.9136 | 0.6535 | 0.8832 | 0.7222 |
| 16 | 0.9533 | 0.6394 | 0.8754 | 0.4567 | 0.7961 | 0.6927 |
| 17 | 0.9370 | 0.3587 | 0.9291 | 0.5597 | 0.8715 | 0.7184 |
| 18 | 0.9732 | 0.4025 | 0.9146 | 0.6874 | 0.8273 | 0.7158 |
| Number | RT-Proposed Method(s) | RT-Candy-Morphology(s) | RT-SWT(s) |
|---|---|---|---|
| 1 | 2.1285 | 2.9224 | 4.2328 |
| 2 | 1.1376 | 2.0462 | 3.6519 |
| 3 | 3.8280 | 3.4582 | 4.9786 |
| 4 | 1.0969 | 2.7031 | 4.3437 |
| 5 | 1.2345 | 2.8442 | 4.1065 |
| 6 | 1.2428 | 2.6918 | 3.9110 |
| 7 | 1.9997 | 2.7717 | 3.9742 |
| 8 | 0.8414 | 2.4180 | 4.0313 |
| 9 | 1.6320 | 3.0660 | 4.8097 |
| 10 | 2.7472 | 3.4834 | 5.3840 |
| 11 | 1.2736 | 2.6746 | 5.5774 |
| 12 | 1.2082 | 2.8016 | 4.2024 |
| 13 | 0.9160 | 2.2509 | 4.0607 |
| 14 | 1.4074 | 2.9806 | 4.9223 |
| 15 | 0.8659 | 2.9569 | 4.4141 |
| 16 | 1.0288 | 3.0996 | 4.7188 |
| 17 | 1.8465 | 2.6030 | 4.0301 |
| 18 | 2.5270 | 2.7639 | 4.9794 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, L.; Tian, Y.; Wu, W. A Dark Target Detection Method Based on the Adjacency Effect: A Case Study on Crack Detection. Sensors 2019, 19, 2829. https://doi.org/10.3390/s19122829
Yu L, Tian Y, Wu W. A Dark Target Detection Method Based on the Adjacency Effect: A Case Study on Crack Detection. Sensors. 2019; 19(12):2829. https://doi.org/10.3390/s19122829
Chicago/Turabian StyleYu, Li, Yugang Tian, and Wei Wu. 2019. "A Dark Target Detection Method Based on the Adjacency Effect: A Case Study on Crack Detection" Sensors 19, no. 12: 2829. https://doi.org/10.3390/s19122829
APA StyleYu, L., Tian, Y., & Wu, W. (2019). A Dark Target Detection Method Based on the Adjacency Effect: A Case Study on Crack Detection. Sensors, 19(12), 2829. https://doi.org/10.3390/s19122829