In this section, the basic principle of OFDR is introduced, and the relationship between the spectrum (time) and position (frequency) is established. Subsequently, WT time-frequency analysis method and how to adapt WT to demodulate distributed sensing information are demonstrated. Finally, the influences of the WT’s parameters on distributed sensing are discussed and problem during the application of WT in demodulating OFDR signal is solved.
2.1. Basic Principle of OFDR
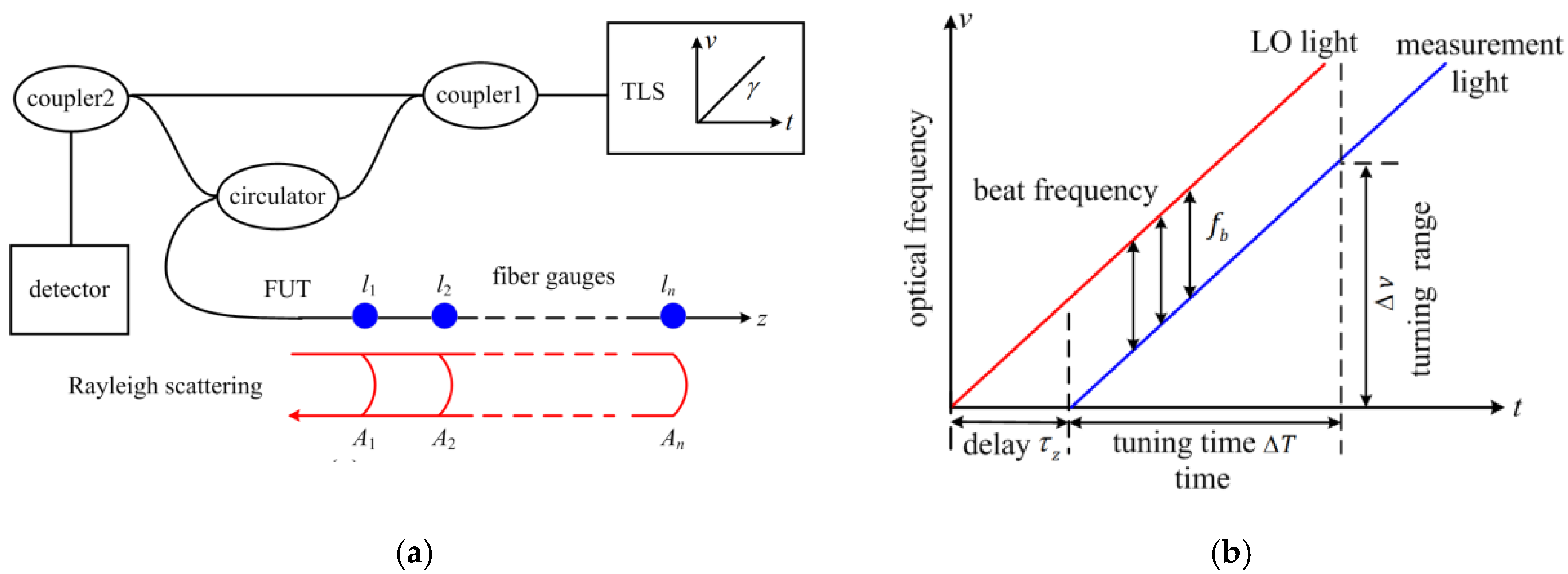
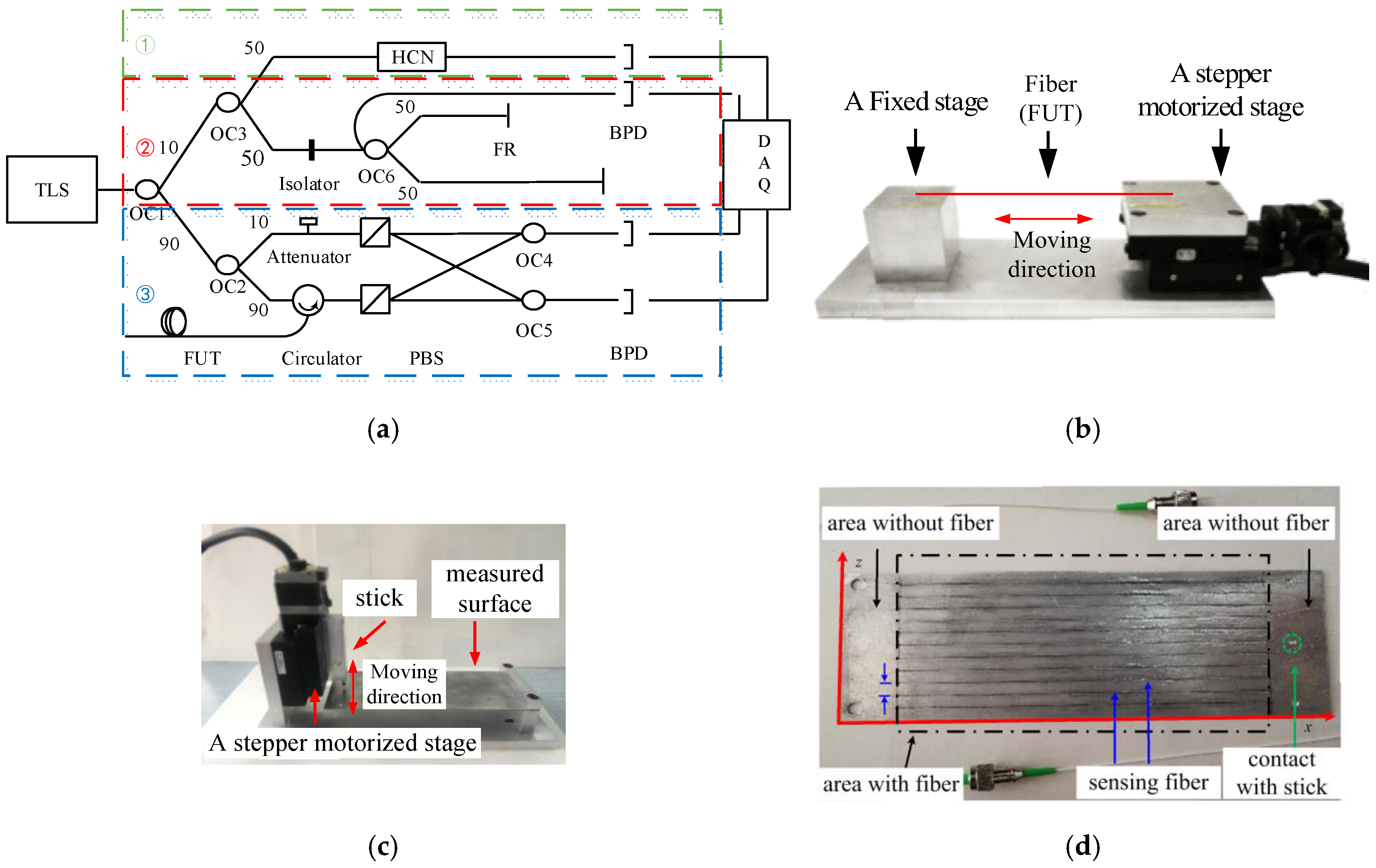
Figure 1a illustrates a basic OFDR configuration. It consists of a tunable laser source (TLS), two optical fiber couplers, a circulator, and FUT for distributed sensing. The main structure of OFDR is an interferometer for local oscillator (LO) light from TLS and measurement light (distributed reflected light) from FUT. Weak FBGs or RS in FUT can influence the distributed reflected light from FUT. On the other hand, the spectrum of the local fiber gauge varies with the subjected strain/temperature whether the fiber gauge is FBG or a common single mode fiber. Accordingly, the reflected light from FUT carries the distributed sensing information.
The spectrum of fiber gauges that are located at different positions along the fiber can be differentiated by delay time. The TLS performs linear-frequency-sweeping and transforms the delay times into beat frequency variations in the OFDR interferometer during the distributed sensing. The normalized signal of a Dirac fiber gauge received by a DC-blocked detector can be written as:
where,
is the initial frequency of the TLS,
is the linear-frequency-sweeping velocity,
is the delay time between LO and measurement light, and
is the normalized reflectivity or the spectrum of the Dirac fiber gauge.
Figure 1b indicates that the beat frequency of the interference signal is proportional to the delay time:
where,
z is the length from the position of zero delay time to the Dirac fiber gauge and
n is the refractive index of the FUT.
The reflectivity or the spectrum of the Dirac fiber gauge can be achieved through FFT and IFFT at a certain beat frequency. Fiber gauges of different locations can be differentiated by their frequencies. Distributed sensing can be accomplished based on Equations (1) and (2). However, RS is continuous along the fiber and there are lots of fiber gauges in FUT. The normalized signal is an integral of every fiber gauges within the whole frequency-sweeping time:
where,
L is the length of FUT.
It can be seen from Equation (3) that the OFDR signal is a combination of signals of different frequencies and the location of the fiber gauge is proportional to the beat frequency. A swept laser is utilized based on the principle of OFDR and the sampled time is proportional to the wavelength or optical frequency. The measured signal of an OFDR system in time-domain can be related to the wavelength of the swept laser source:
where,
is the initial wavelength of the swept laser source and
is the swept velocity.
At the moment of , the measured signal of an OFDR system reflects the sensing information of the wavelength . On the other hand, Equation (2) indicates that the reflected position is related to the beat frequency of the measured signal. One can achieve the distributed sensing data by using a time-frequency analysis method at the moment of , wherein the x and y axes, respectively, represent position along the sensing fiber and reflectivity of the wavelength .
Therefore,
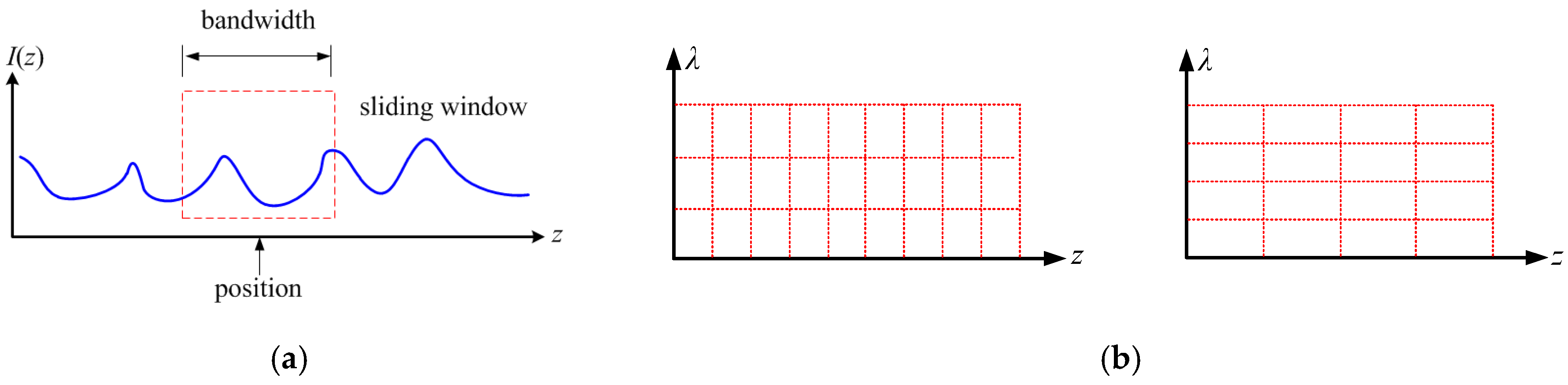
Figure 2a illustrates the conventional OFDR demodulation process. A sliding window is adapted to the OFDR signal in the position-domain that goes through FFT of original OFDR signal. Based on Equation (1), the signal component within the frequency window is related to the spectrum information of the fiber gauge. On the other hand, the position and bandwidth of the window, respectively, respect to the position along the FUT and spatial resolution of the distributed sensing. The point number within the sliding window or the spatial resolution determines the spectrum resolution. Accordingly, it is a trade-off between spatial and spectrum resolution. Subsequently, IFFT is applied to the signal component within the window and the spectrum of the corresponding fiber gauge is thus obtained. This process can be equivalent to a STFT spatial-spectrum analysis.
A high frequency signal should be analyzed using a narrow window to achieve a high time resolution based on the basic principle of time-frequency analysis; a low frequency signal should be analyzed while using a broad window to achieve a high frequency resolution.
Figure 2b indicates the comparison of STFT’s spatial and spectrum resolution: left has better spatial resolution and right has better wavelength resolution.
Figure 2b shows that the time-frequency analysis window of STFT is interdependent, which describes the trade-off between spatial and spectrum resolution in the OFDR demodulation method that is based on STFT. It also indicates that the frequency-time window of STFT is fixed and it cannot be automatically adapted to the frequency. In the distributed optical fiber sensing, for the fiber gauges near the beginning of FUT (beat frequency is lower), a wide window should be applied and the spatial resolution is relatively lower. However, a narrow window should be utilized for the fiber gauges of a long distance and the spatial resolution can be higher.
2.2. OFDR Demodulation Method Based on WT
Based on the principle of OFDR, it can be identified as an optical time-frequency signal analysis problem, and the spectrum and location of OFDR are, respectively, corresponding to time and frequency domain. The combination of the WT and OFDR would improve the distributed sensing performance of OFDR. The trade-off problem between spectrum and spatial resolution can be solved and the spectrum resolution is significantly enhanced.
The discrete WT (DWT) of the measuring signal can be written as [
10,
11]:
where,
is the wavelet coefficient that represents the energy in the corresponding frequency range,
is the measured time-domain signal of OFDR,
is the mother wavelet,
and
is the scaling factor and translation factor,
represents the complex conjugate of
, and
N is the data length of the sample OFDR signal.
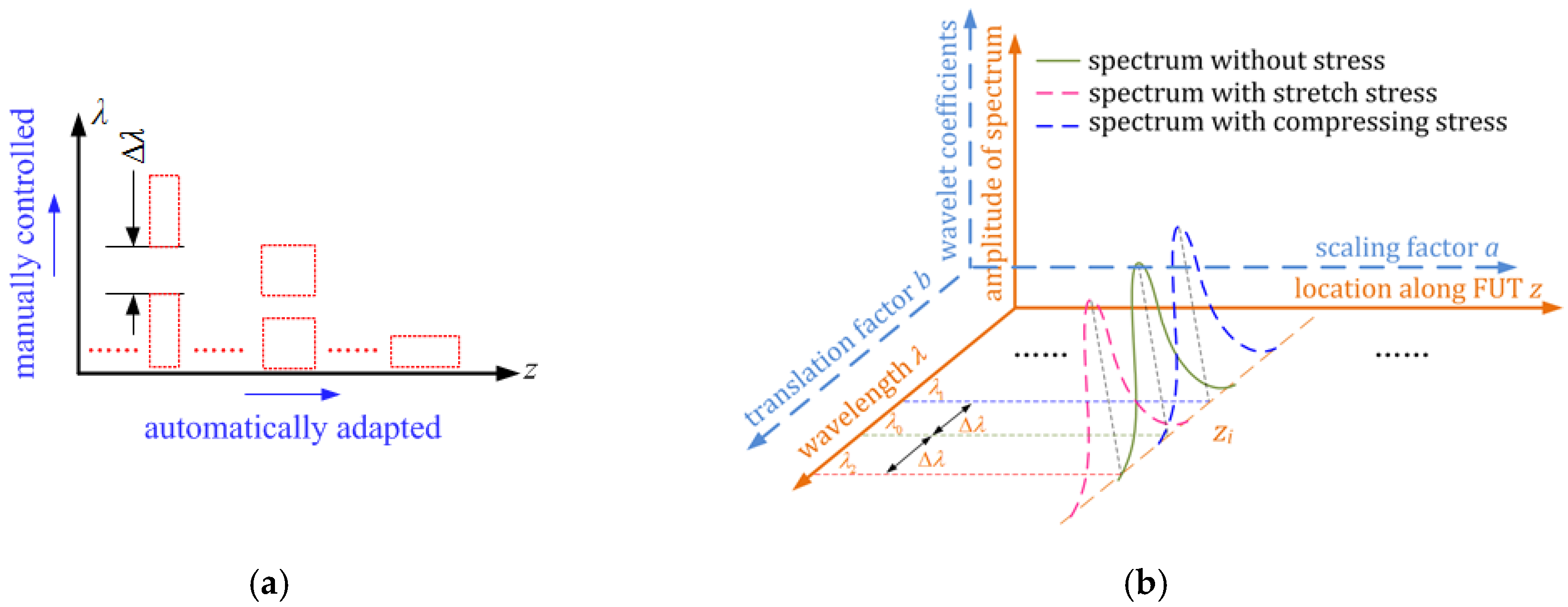
The intrinsic limitation of STFT on time-frequency analysis leads to a rapid decrease of spectrum resolution with an increment of spatial resolution and their trade-off is very significant. However, the WT tool can always keep the uncertainty principle during the time-frequency analysis process. The time and frequency resolution can be automatically adapted. As shown in
Figure 3a, axis
x is in the frequency domain and it represents spatial location
z long the fiber; axis
y is in time domain and represents the wavelength. WT has a better time resolution for signal of a high frequency. However, frequency resolution is paid more attention for signal of a low frequency rather than a high time resolution. Hence, the time window of WT method is automatically varied with the frequency and it keeps an appropriate frequency resolution. The most difference between WT and STFT is the time-frequency transformation theory: WT uses the instantaneous base signal of different frequencies in time domain to analyze the time-frequency characteristics of signal. The time resolution would get worse with the increment of analyzed frequency due to the automatic time-frequency adaptation of WT. However, the instantaneous base signal has a narrow bandwidth in frequency-domain and a short duration in time-domain. The bandwidth of the instantaneous base signal in spectrum-domain is would be much narrower than that of STFT method and about several pm when using the WT method. The spatial and spectrum resolution vary with the location based on the characteristics of the WT method. Generating new scaling factors in different divided segments can solve the location-varying spatial resolution, which will be discussed in the following. In every divided segment, the location-varying spectrum resolution can be ignored, because its bandwidth in spectrum-domain is several pm and the spectrum resolution is manually controlled by the translation factors. Accordingly, the time and frequency resolution can be independently controlled, and this method can reduce the trade-off between time and frequency resolution. While, it is fixed when the frequency resolution is once determined in the STFT method. By this characteristic of WT, the spectrum or measured physical quantity resolution can be manually selected of different locations.
The WT base can be built according to the time-frequency analysis requirements. WT could achieve a better time resolving performance, which the frequency resolution hardly influences, and information in the time-domain is thus much more abundant. This method is significantly different from the STFT method that is based on padding zeros, which gets more information by interpolation. However, WT can directly and accurately achieve frequency-domain characteristics through instantaneous WT bases of different frequencies in time-domain.
In the WT method, the frequency and observed time can be controlled by the scaling and translation factors. Hence, the wavelet series can be thus regarded as a series of local time-frequency transformation windows with varying frequency:
where,
and
is the scaling series and translation series,
and
is the central frequency of the mother wavelet and wavelet series, and
is the location of the observed time windows.
The amplitudes of the different frequency elements can be extracted by a series of bandpass filters (BPF) that were formed by wavelet series with different scaling factors. The amplitudes at different observed times can be extracted by a series of time windows that formed by wavelet series with different translation factors. In
Figure 3b, a series of BPF with different central frequencies and different observed times is achieved and the time-frequency characteristics of the measured signal can be thus analyzed.
In an OFDR system, an auxiliary interferometer generates an equal-wavelength-sampling clock. The beat frequencies of the measurement interferometer are proportional to the position of the measured gauges along FUT and the time-varying amplitude of a certain frequency element is related to the RS spectrum of the corresponding measured gauge. By using WT in the processing of OFDR signals, a series of BPF of different central frequencies can extract the distributed sensing information of different measured gauges and the time-varying location of the BPF is related to the wavelength. The two-dimensional (2D) scaling and translation series in time-frequency WT is thus equivalent to a 2D location-wavelength series in OFDR, as shown in
Figure 3b. The wavelet coefficients represent the amplitudes of the RS spectrum in spatial-spectrum domain. Accordingly, the relationship between wavelet factors and the distributed sensing can be written as:
where,
is the location of the measured gauge,
is the wavelength of the current wavelet,
is the refractive index of FUT,
is the swept velocity of the tunable laser source,
is the velocity of light, and
is the initial swept wavelength.
Based on the Equation (7), the wavelet coefficients in a 2D space (
ai,
bi) are related to the amplitudes of the distributed reflection spectrum in a 2D space (
zi,
λi), as illustrated
Figure 3b. It also shows that the spectrum shift of a certain gauge is proportional to the shift of translation factor and cross-correlation calculation can be utilized to achieve the spectrum shift. One can achieve the WT coefficient (
zi,
λi) by WT of OFDR signal with the proper scaling and translation series. The WT coefficient (
z0,
λi) represents the RS spectrum of a sensing gauge located at position
z0. Cross-correlation of the reference and measurement RS spectrum is then calculated to achieve a spectrum shift that is proportion to strain or temperature variation. Cross-correlation is successively calculated to get distributed sensing data. Accordingly, a new signal processing method for demodulating the distributed sensing information of OFDR is thus proposed.
Subsequently, the mother wavelets and how it influences the distributed sensing are investigated. The time-frequency transformation results are highly dependent on the characteristics of the mother wavelet. In general, a mother wavelet of a high form similarity with the measured signal is chosen in the application. Morlet wavelet, which is usually used in the fields of seismic wave, voice, heartbeat, and some linear frequency modulating signal analysis, is a complex-sine-modulated Gauss wavelet. In this paper, Morlet wavelet is employed as the mother wavelet in the distributed sensing. The Morlet wavelet can be expressed in a discrete form as:
where,
and
are related to the bandwidth and central frequency of the mother wavelet.
The central frequency of the mother wavelet can be related to the spatial position of distributed sensing, when
:
The bandwidth of the Morlet wavelet of different scale factors in frequency can be written as:
The bandwidth of the mother wavelet is related to the spatial resolution. Based on Equations (2), (6), and (7), the bandwidth of the Morlet wavelet of different scale factors can be written as:
where,
is the window bandwidth in the location space.
Besides, the relationship between window bandwidth in the frequency and location space can be expressed as:
Hence, the relationship between the window bandwidth in the location space (representing spatial resolution) and the bandwidth of the mother wavelet can be achieved:
Equation (13) demonstrates that the window bandwidth in the location space is determined by , which should be set according to the demand spatial resolution.
Based on Equation (13), the spatial resolution varies with location in the WT method. Equation (9) also indicates that the spatial or frequency bandwidth can be controlled by scale factor. Accordingly, the analysis signal is divided into several segments. The central frequency of each segment is different and the spatial or frequency bandwidth can be kept in an acceptable range. The segments can be determined in the following method:
where,
is initial distributed sensing location,
,
, and
are, respectively, the maximum variation spatial resolution, the maximum variation ratio, and the set spatial resolution.
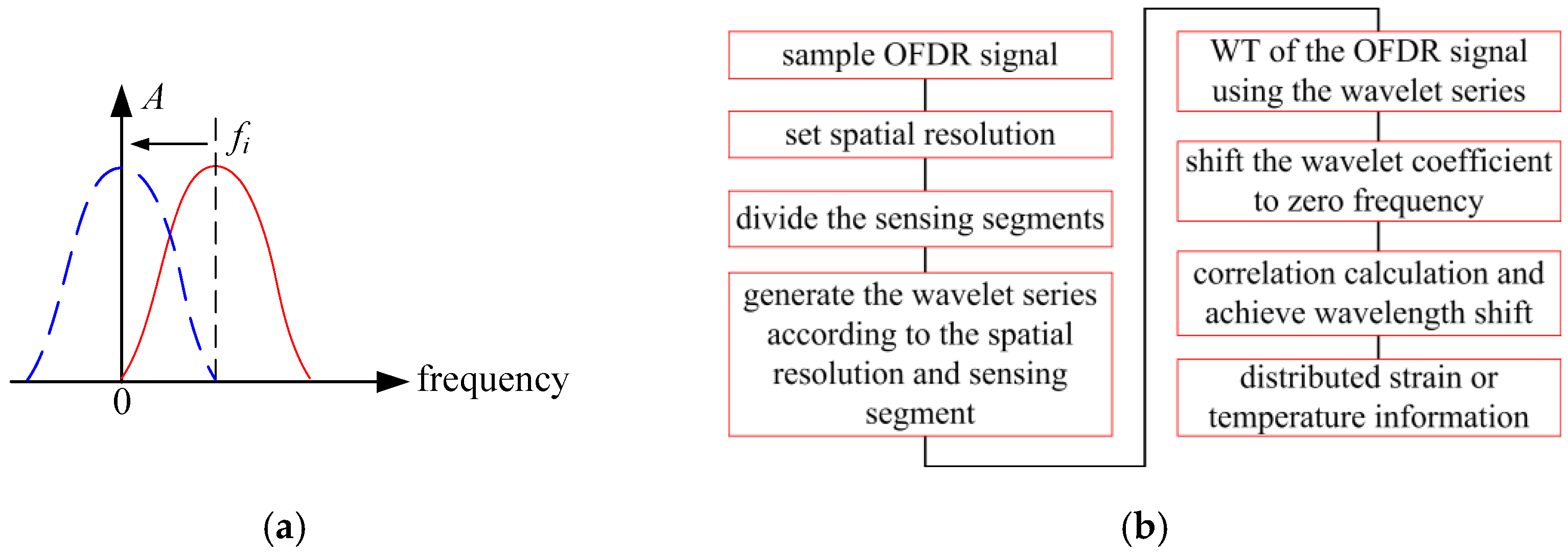
Each wavelet can be considered as a BPF in the frequency or location domain. Therefore, the signal of wavelet coefficients is located in intermediate frequency (IF) and it contains IF noise.
Figure 4a illustrates the diagram of the wavelet equivalent BPF and its central frequency is
. The RS spectrum should be shift by a frequency of
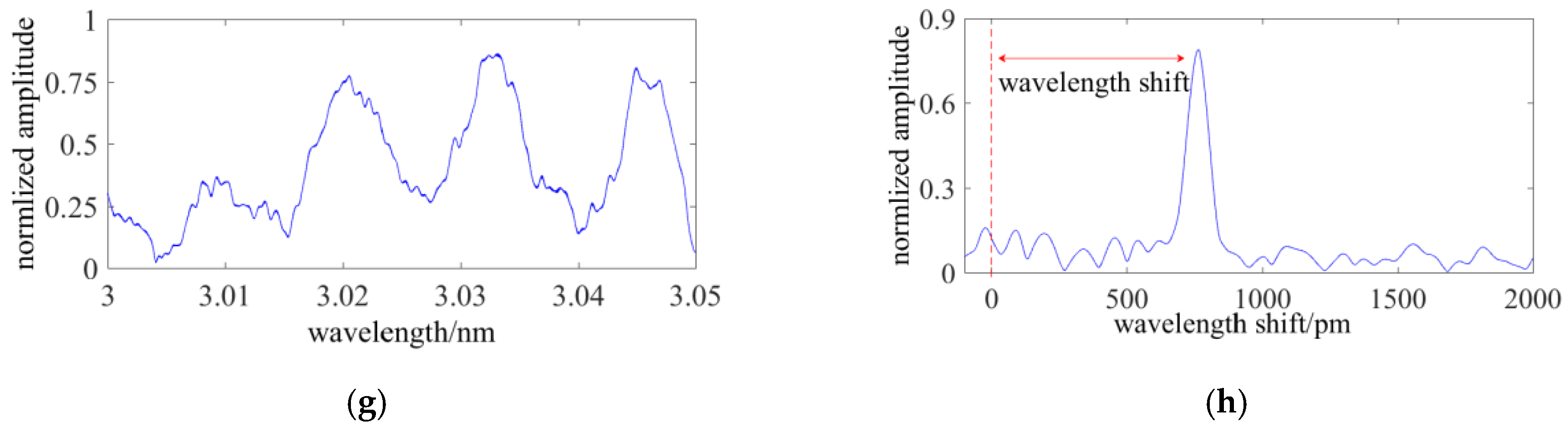
to zero frequency and the IF noise would be filtered to reduce the IF noise. This method can filter the IF noise and the curves are smoother. Besides, the cross-correlation result only has one peak and the wavelength shift can be clearly extracted.
In conclusion, an OFDR demodulation method that was based on WT is demonstrated as above and
Figure 4b illustrates the signal processing flow:
- (1)
Sample OFDR signal.
- (2)
Set the spatial based on the requirement. In Equation (13), is the spatial resolution when . Hence, can be determined with an acknowledgement of an OFDR system.
- (3)
Divide the sensing segments while using the method demonstrated in Equation (14). One can determine the length of a segment with the initial position of segments once the acceptable spatial resolution variation is confirmed. Accordingly, the segments are divided in this way.
- (4)
Generate the wavelet series of each sensing segments according to the spatial resolution. Based on Equation (7), the scaling and translation factors are generated, and their interval are, respectively, spatial and wavelength interval. At the same time, the wavelet base function can be achieved while using Equation (8).
- (5)
WT of the OFDR signal with the wavelet series. One can do WT of the OFDR signal with the wavelet series that are generated in step (4) while using Equation (5).
- (6)
Shift RS spectrum to zero frequency to reduce the IF noise. Multiply the RS spectrum with a cosine IF signal and then put the signal through a lowpass filter.
- (7)
Cross-correlation calculation of the reference and measurement RS spectrum and achieve the wavelength shift of each sensing gauge.
- (8)
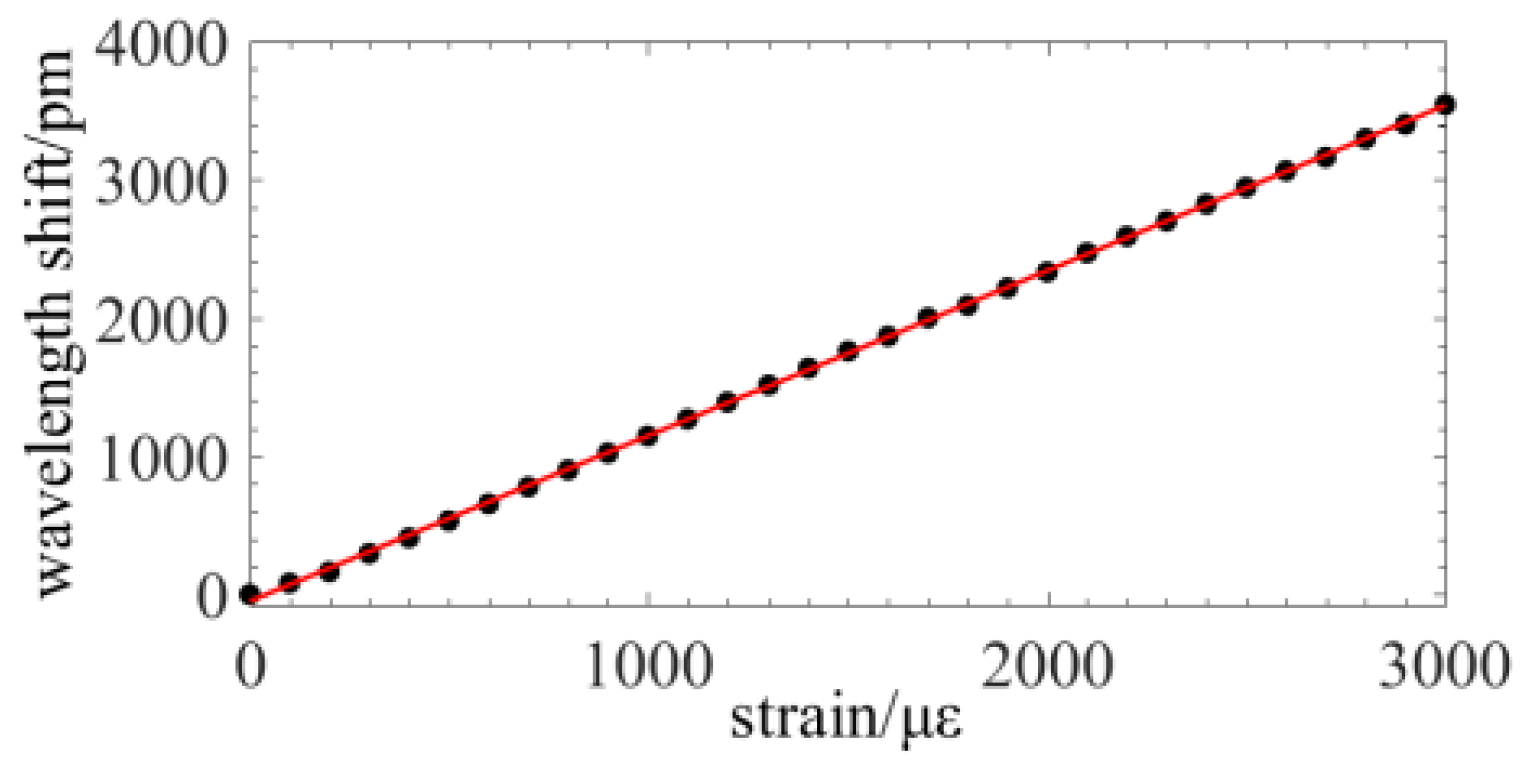
Reconstruct the distributed strain or temperature information according to their sensitivity verse wavelength shift.

 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}












