Signal Amplification Gains of Compressive Sampling for Photocurrent Response Mapping of Optoelectronic Devices


Abstract
:1. Introduction
2. Methodology
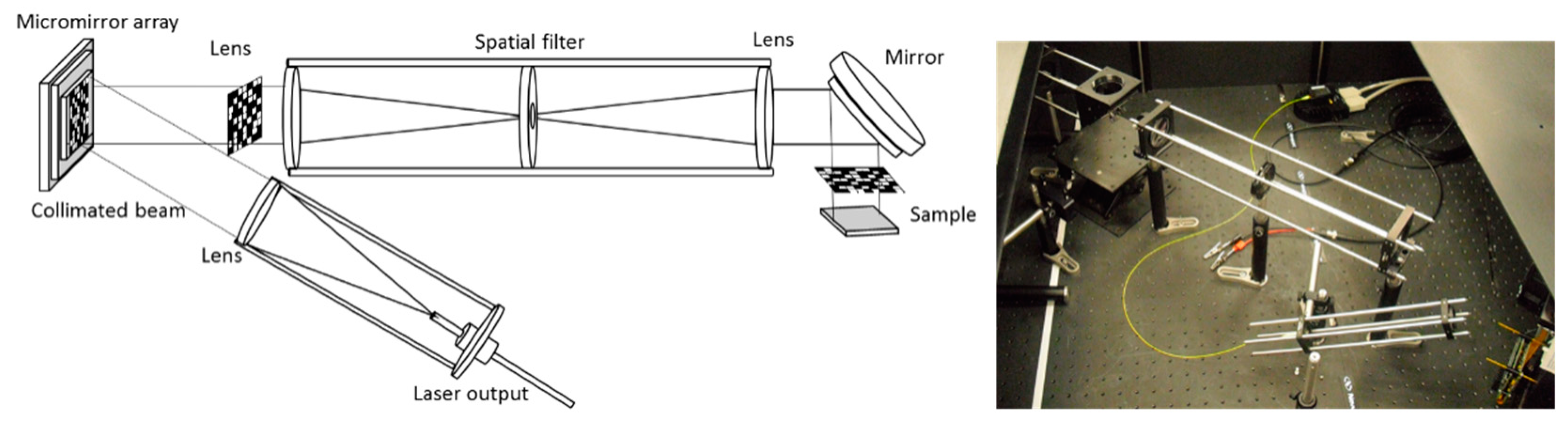
2.1. Experimental Layout
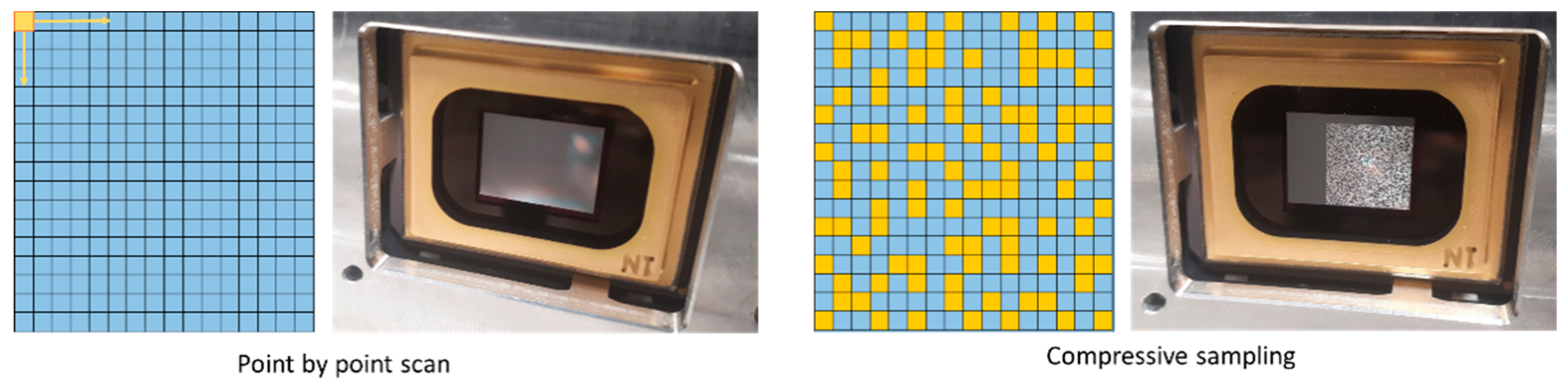
2.2. Compressed Sensing Current Mapping
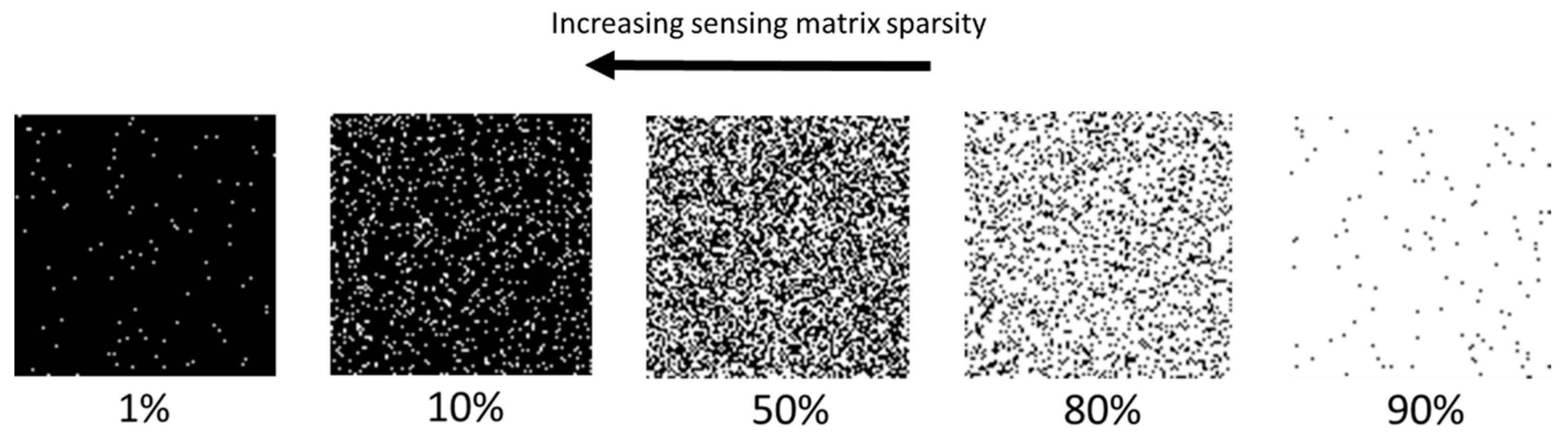
2.3. Sensing Matrix Sparsity
3. Results
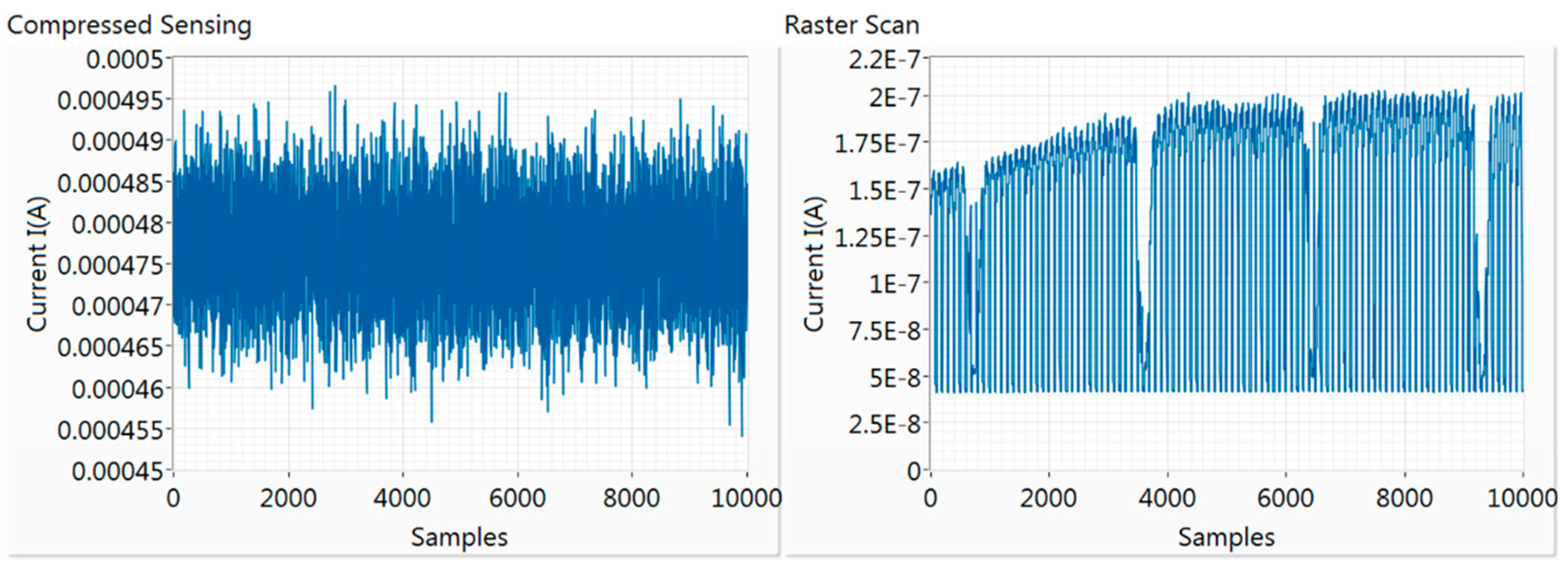
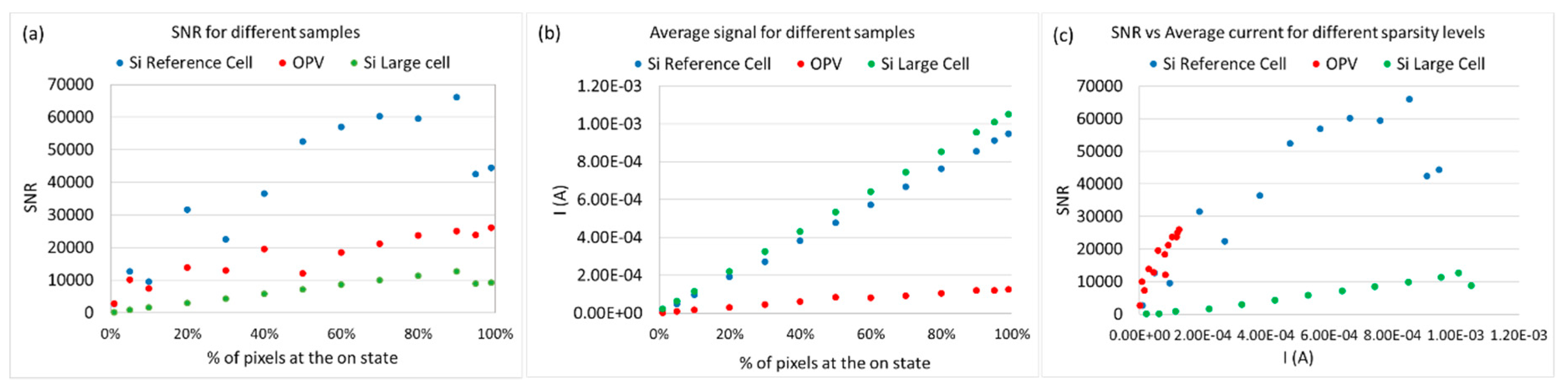
3.1. Signal Amplification
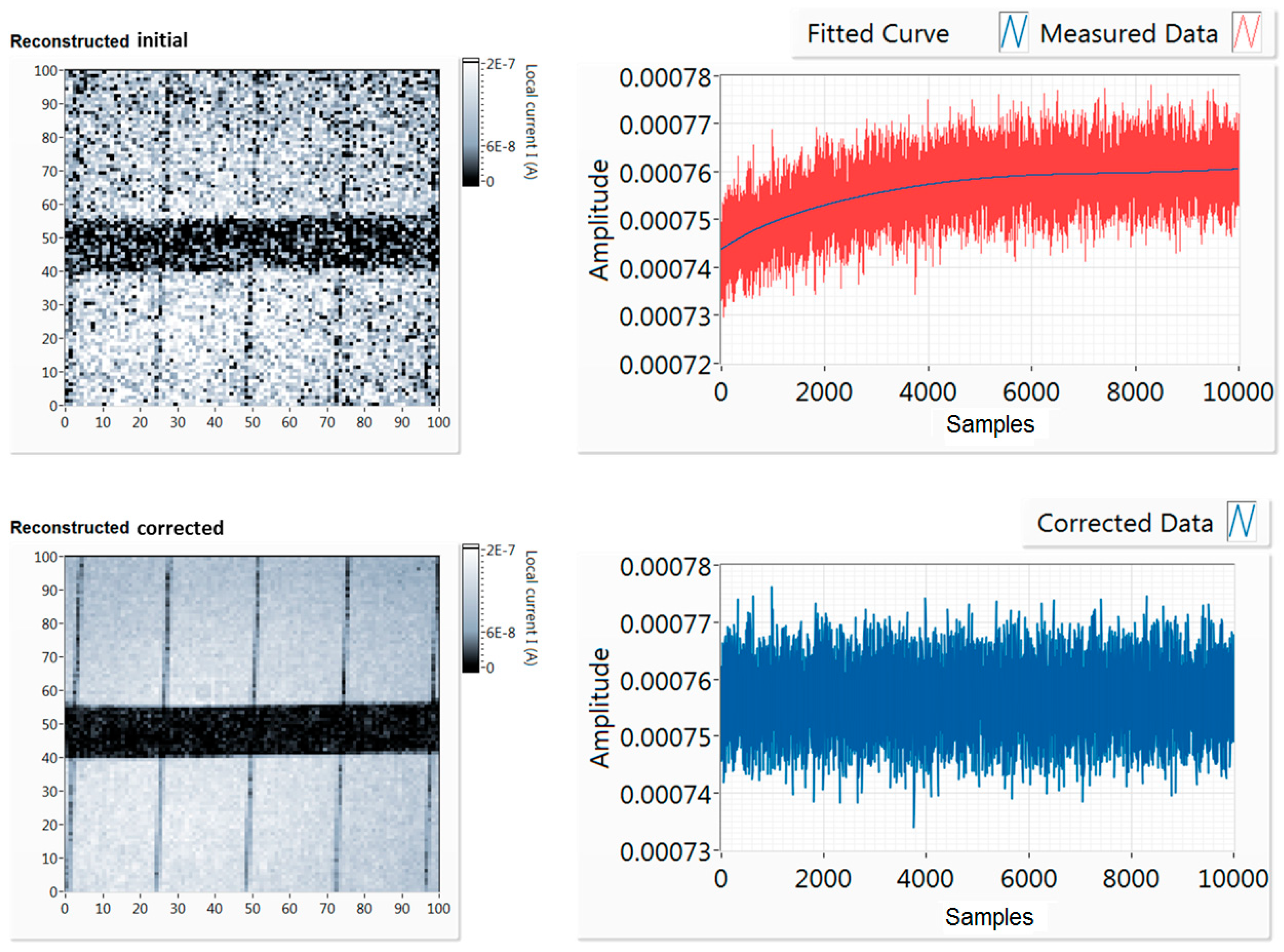
3.2. Low-Frequency Noise Correction
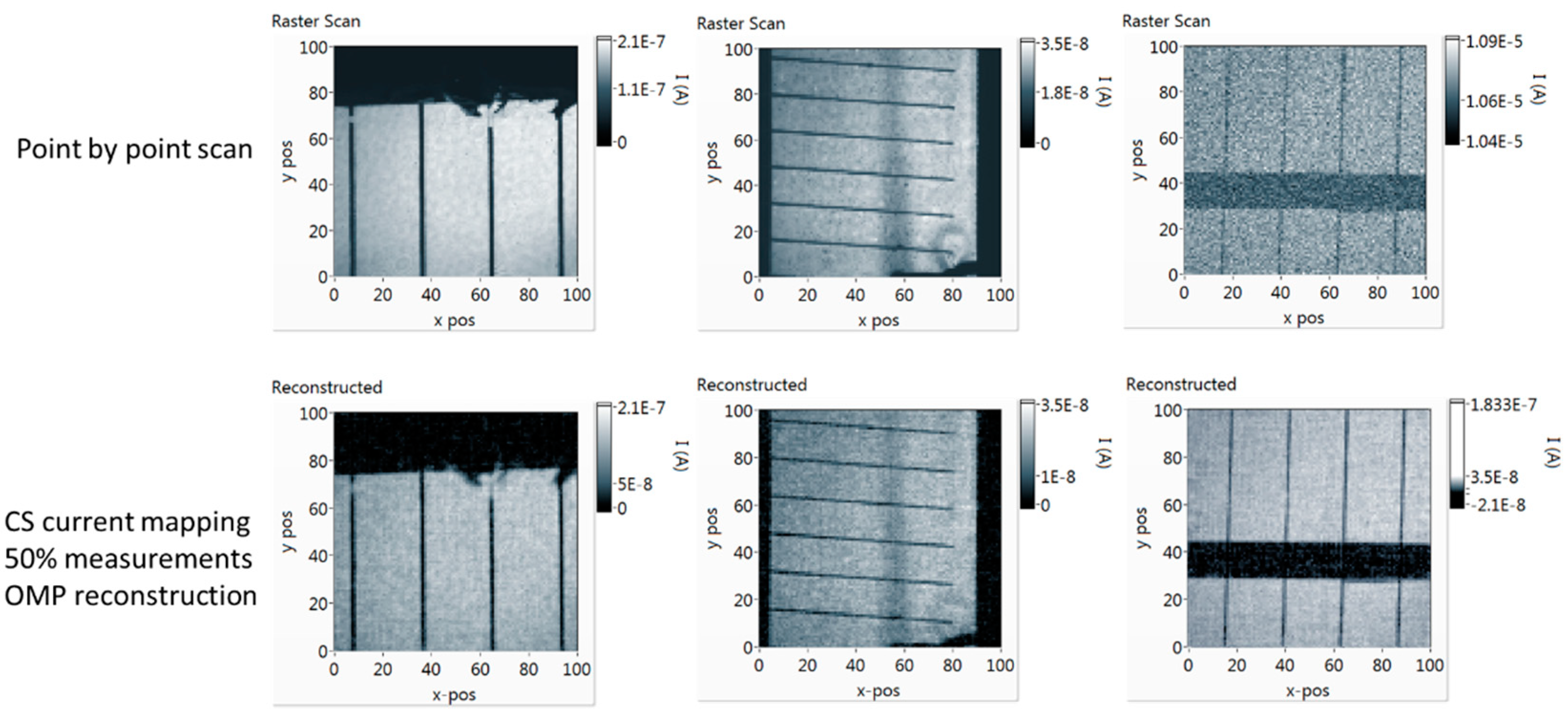
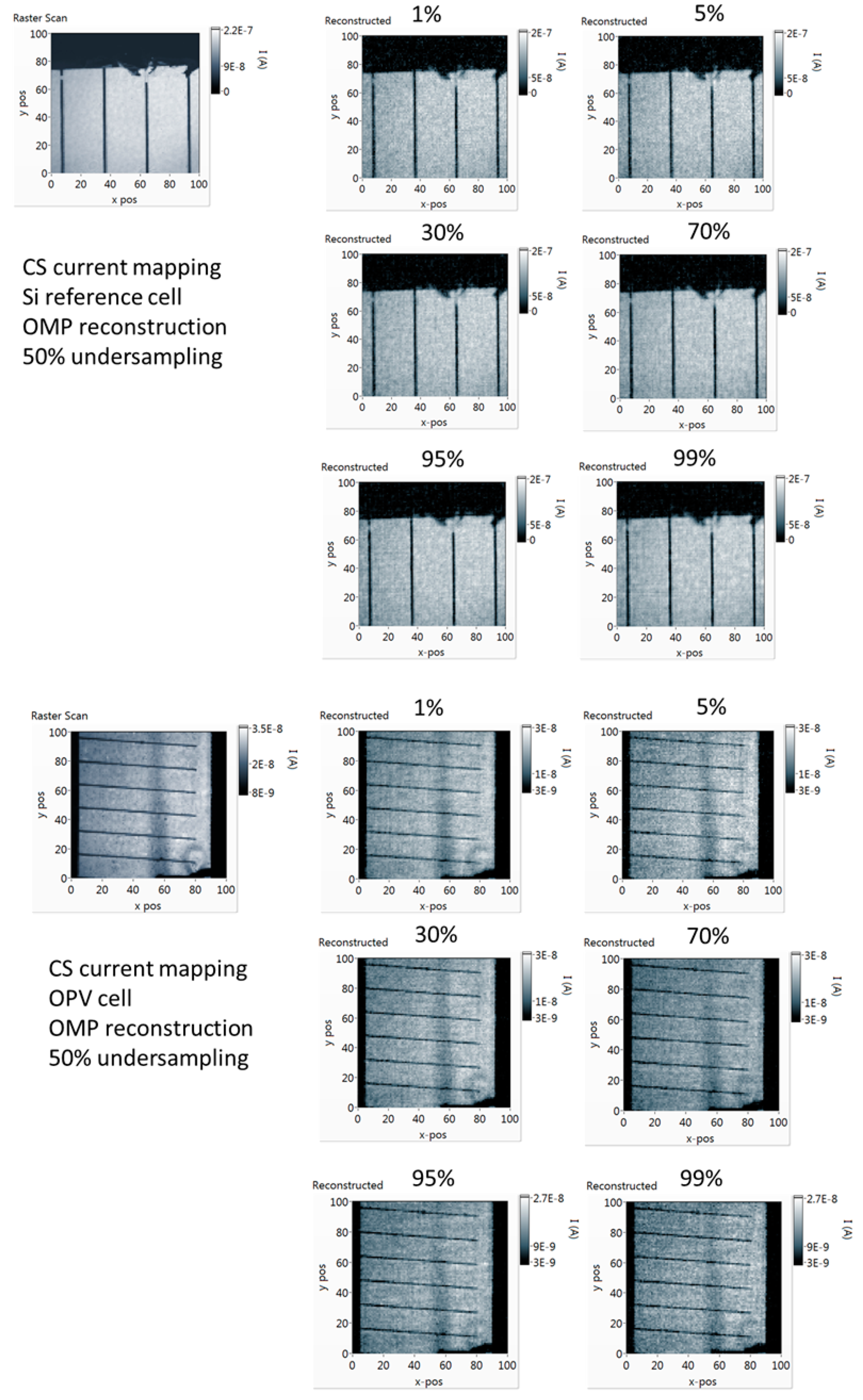
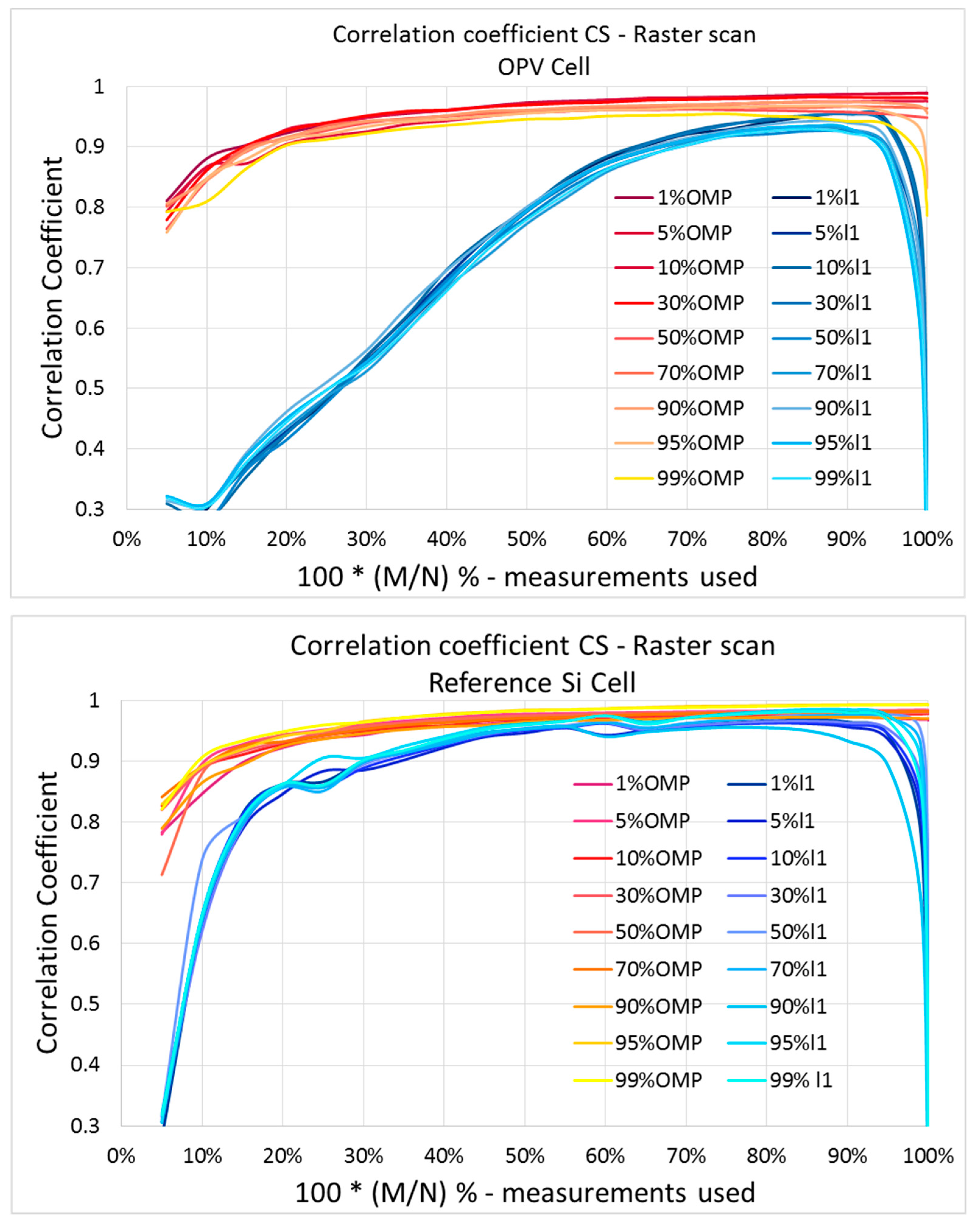
3.3. Reconstruction Performance
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Padilla, M.; Michl, B.; Thaidigsmann, B.; Warta, W.; Schubert, M.C. Short-circuit current density mapping for solar cells. Sol. Energy Mater. Sol. Cells 2014, 120, 282–288. [Google Scholar] [CrossRef]
- Redfern, D.A.; Smith, E.P.G.; Musca, C.A.; Dell, J.M.; Faraone, L. Interpretation of current flow in photodiode structures using laser beam-induced current for characterization and diagnostics. IEEE Trans. Electron Devices 2006, 53, 23–31. [Google Scholar] [CrossRef]
- Qiu, W.C.; Hu, W. Da Laser beam induced current microscopy and photocurrent mapping for junction characterization of infrared photodetectors. Sci. China Phys. Mech. Astron. 2014, 58, 1–13. [Google Scholar] [CrossRef]
- Xu, K.; Huang, L.; Zhang, Z.; Zhao, J.; Zhang, Z.; Snyman, L.W.; Swart, J.W. Light emission from a poly-silicon device with carrier injection engineering. Mater. Sci. Eng. B 2018, 231, 28–31. [Google Scholar] [CrossRef]
- Xu, K. Silicon MOS Optoelectronic Micro-Nano Structure Based on Reverse-Biased PN Junction. Phys. Status Solidi 2019, 216, 1800868. [Google Scholar] [CrossRef]
- Bokalič, M.; Jankovec, M.; Topič, M. Solar Cell Efficiency Mapping by LBIC. In Proceedings of the 45th International Conference on Microelectronics, Devices and Materials & The Workshop on Advanced Photovoltaic Devices and Technologies, Postojna, Slovenia, 9–11 September 2009; pp. 269–273. [Google Scholar]
- Rinio, M.; Müller, H.J.; Werner, M. LBIC investigations of the lifetime degradation by extended defects in multicrystalline solar silicon. Solid State Phenom. 1998, 63–64, 115–122. [Google Scholar] [CrossRef]
- Carstensen, J.; Schütt, A.; Popkirov, G.; Föll, H. CELLO measurement technique for local identification and characterization of various types of solar cell defects. Phys. Status Solidi 2011, 8, 1342–1346. [Google Scholar] [CrossRef]
- Vorasayan, P.; Betts, T.R.; Gottschalg, R. Limited laser beam induced current measurements: A tool for analysing integrated photovoltaic modules. Meas. Sci. Technol. 2011, 22, 085702. [Google Scholar] [CrossRef]
- Sites, J.R.; Nagle, T.J. LBIC analysis of thin-film polycrystalline solar cells. In Proceedings of the Conference Record of the IEEE Photovoltaic Specialists Conference, Lake Buena Vista, FL, USA, 3–7 January 2005; pp. 199–204. [Google Scholar]
- Geisthardt, R.M.; Sites, J.R. Nonuniformity characterization of cdte solar cells using LBIC. IEEE J. Photovoltaics 2014, 4, 1114–1118. [Google Scholar] [CrossRef]
- Carstensen, J.; Popkirov, G.; Bahr, J.; Föll, H. CELLO: An advanced LBIC measurement technique for solar cell local characterization. Sol. Energy Mater. Sol. Cells 2003, 76, 599–611. [Google Scholar] [CrossRef]
- Vorasayan, P.; Betts, T.R.; Tiwari, A.N.; Gottschalg, R. Multi-laser LBIC system for thin film PV module characterisation. Sol. Energy Mater. Sol. Cells 2009, 93, 917–921. [Google Scholar] [CrossRef] [Green Version]
- Seager, C.H. The determination of grain-boundary recombination rates by scanned spot excitation methods. J. Appl. Phys. 1982, 53, 5968. [Google Scholar] [CrossRef]
- Gupta, R.; Breitenstein, O. Digital micromirror device application for inline characterization of solar cells by tomographic light beam-induced current imaging. Proc. SPIE 2007, 6616, 66160O-1–66160O-9. [Google Scholar] [CrossRef]
- Hornbeck, L.J. The DMDTM Projection Display Chip: A MEMS-Based Technology. MRS Bull. 2001, 26, 325–327. [Google Scholar] [CrossRef]
- Riddick, B.C.; Montgomery, E.J.; Fiorito, R.B.; Zhang, H.D.; Shkvarunets, A.G.; Pan, Z.; Khan, S.A. Photocathode quantum efficiency mapping at high resolution using a digital micromirror device. Phys. Rev. Spec. Top. Accel. Beams 2013, 16, 14–17. [Google Scholar] [CrossRef]
- Yoo, J.; Kim, S.; Lee, D.; Park, S. Spatial uniformity inspection apparatus for solar cells using a projection display. Appl. Opt. 2012, 51, 4563–4568. [Google Scholar] [CrossRef] [PubMed]
- Fong, A.Y. Application of digital micromirror devices for spectral-response characterization of solar cells and photovoltaics. In Emerging Digital Micromirror Device Based Systems and Applications II; International Society for Optics and Photonics: Leiden, The Netherlands, 2010; Volume 7596, pp. 75960I-1–75960I-8. [Google Scholar]
- Missbach, T.; Karcher, C.; Siefer, G. Frequency Division Multiplex Based Quantum Efficiency Determination of Solar Cells. In 2015 IEEE 42nd Photovoltaic Specialist Conference, PVSC 2015; IEEE: New Orleans, LA, USA, 2015; pp. 1–6. [Google Scholar]
- Xu, K. Integrated Silicon Directly Modulated Light Source Using p-Well in Standard CMOS Technology. IEEE Sens. J. 2016, 16, 6184–6191. [Google Scholar] [CrossRef]
- Koutsourakis, G.; Cashmore, M.; Hall, S.R.G.; Bliss, M.; Betts, T.R.; Gottschalg, R. Compressed Sensing Current Mapping Spatial Characterization of Photovoltaic Devices. IEEE J. Photovolt. 2017, 7, 486–492. [Google Scholar] [CrossRef] [Green Version]
- Hall, S.R.G.; Cashmore, M.; Blackburn, J.; Koutsourakis, G.; Gottschalg, R. Compressive Current Response Mapping of Photovoltaic Devices Using MEMS Mirror Arrays. IEEE Trans. Instrum. Meas. 2016, 65, 1945–1950. [Google Scholar] [CrossRef] [Green Version]
- Cashmore, M.T.; Koutsourakis, G.; Gottschalg, R.; Hall, S.R.G. Optical technique for photovoltaic spatial current response measurements using compressive sensing and random binary projections. J. Photonics Energy 2016, 6, 025508. [Google Scholar] [CrossRef] [Green Version]
- Quan, L.; Xie, K.; Xi, R.; Liu, Y. Compressive light beam induced current sensing for fast defect detection in photovoltaic cells. Sol. Energy 2017, 150, 345–352. [Google Scholar] [CrossRef]
- Donoho, D. Compressed sensing. IEEE Trans. Inf. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Candès, E.J.; Romberg, J.K.; Tao, T. Stable signal recovery from incomplete and inaccurate measurements. Commun. Pure Appl. Math. 2006, 59, 1207–1223. [Google Scholar] [CrossRef] [Green Version]
- Lustig, M.; Donoho, D.; Pauly, J.M. Sparse MRI: The application of compressed sensing for rapid MR imaging. Magn. Reson. Med. 2007, 58, 1182–1195. [Google Scholar] [CrossRef] [PubMed]
- Duarte, M.F.; Davenport, M.A.; Takhar, D.; Laska, J.N.; Sun, T.; Kelly, K.F.; Baraniuk, R.G. Single-Pixel Imaging via Compressive Sampling. IEEE Signal Process. Mag. 2008, 25, 83–91. [Google Scholar] [CrossRef]
- Ender, J.H.G. On compressive sensing applied to radar. Signal Process. 2010, 90, 1402–1414. [Google Scholar] [CrossRef]
- Ye, P.; Paredes, J.L.; Arce, G.R.; Wu, Y.; Chen, C.; Prather, D.W. Compressive confocal microscopy. In Proceedings of the 2009 IEEE International Conference on Acoustics, Speech and Signal Processing, Taipei, Taiwan, 19–24 April 2009; Volume 7210, pp. 429–432. [Google Scholar]
- Li, Z.; Gao, F.; Greenham, N.C.; McNeill, C.R. Comparison of the Operation of Polymer/Fullerene, Polymer/Polymer, and Polymer/Nanocrystal Solar Cells: A Transient Photocurrent and Photovoltage Study. Adv. Funct. Mater. 2011, 21, 1419–1431. [Google Scholar] [CrossRef]
- Marcia, R.F. Compressed sensing for practical optical imaging systems: A tutorial. Opt. Eng. 2011, 50, 072601. [Google Scholar] [CrossRef]
- Koutsourakis, G.; Cashmore, M.; Bliss, M.; Hall, S.R.G.; Betts, T.R.; Gottschalg, R. Compressed sensing current mapping methods for PV characterisation. In Proceedings of the Conference Record of the IEEE Photovoltaic Specialists Conference, Portland, OR, USA, 5–10 June 2016; Volume 2016–Novem, pp. 1308–1312. [Google Scholar]
- Baraniuk, R.; Davenport, M.; DeVore, R.; Wakin, M. A Simple Proof of the Restricted Isometry Property for Random Matrices. Constr. Approx. 2008, 28, 253–263. [Google Scholar] [CrossRef] [Green Version]
- Candes, E.J.; Romberg, J.; Tao, T. Robust uncertainty principles: Exact signal reconstruction from highly incomplete frequency information. IEEE Trans. Inf. Theory 2006, 52, 489–509. [Google Scholar] [CrossRef]
- Tropp, J.A.; Gilbert, A.C. Signal recovery from random measurements via orthogonal matching pursuit. IEEE Trans. Inf. Theory 2007, 53, 4655–4666. [Google Scholar] [CrossRef]
- Ye, P.; Paredes, J.L.; Wu, Y.; Chen, C.; Arce, G.R.; Prather, D.W. Compressive Confocal Microscopy: 3D Reconstruction Algorithms. In Proceedings of SPIE; SPIE: Bellingham WA, USA, 2009; Volume 7210, pp. 72100G-1–72100G-12. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sampling Method/Pixels in the “on” State | Raster | CS 1% | CS 50% | CS 99% | |
|---|---|---|---|---|---|
| Average Current I (A) | Ref cell | 1.37 × 10−7 | 9.57 × 10−6 | 4.77 × 10−4 | 9.48 × 10−4 |
| OPV | 2.27 × 10−8 | 1.52 × 10−6 | 8.22 × 10−5 | 1.25 × 10−4 | |
| Large cell | 1.07 × 10−5 | 2.14 × 10−5 | 5.34 × 10−4 | 1.05 × 10−3 | |
| SNR | Ref cell | 54 | 2637 | 52,396 | 44,307 |
| OPV | 19.4 | 2676 | 11,963 | 25,969 | |
| Large cell | 1.1 | 973 | 7056 | 9164 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Koutsourakis, G.; Blakesley, J.C.; Castro, F.A. Signal Amplification Gains of Compressive Sampling for Photocurrent Response Mapping of Optoelectronic Devices. Sensors 2019, 19, 2870. https://doi.org/10.3390/s19132870
Koutsourakis G, Blakesley JC, Castro FA. Signal Amplification Gains of Compressive Sampling for Photocurrent Response Mapping of Optoelectronic Devices. Sensors. 2019; 19(13):2870. https://doi.org/10.3390/s19132870
Chicago/Turabian StyleKoutsourakis, George, James C. Blakesley, and Fernando A. Castro. 2019. "Signal Amplification Gains of Compressive Sampling for Photocurrent Response Mapping of Optoelectronic Devices" Sensors 19, no. 13: 2870. https://doi.org/10.3390/s19132870
APA StyleKoutsourakis, G., Blakesley, J. C., & Castro, F. A. (2019). Signal Amplification Gains of Compressive Sampling for Photocurrent Response Mapping of Optoelectronic Devices. Sensors, 19(13), 2870. https://doi.org/10.3390/s19132870