Speckle Noise Filtering in Side-Scan Sonar Images Based on the Tucker Tensor Decomposition

Abstract
:1. Introduction
2. Related Works
3. Characteristics of the Speckle Noise and Its Filtering Methods
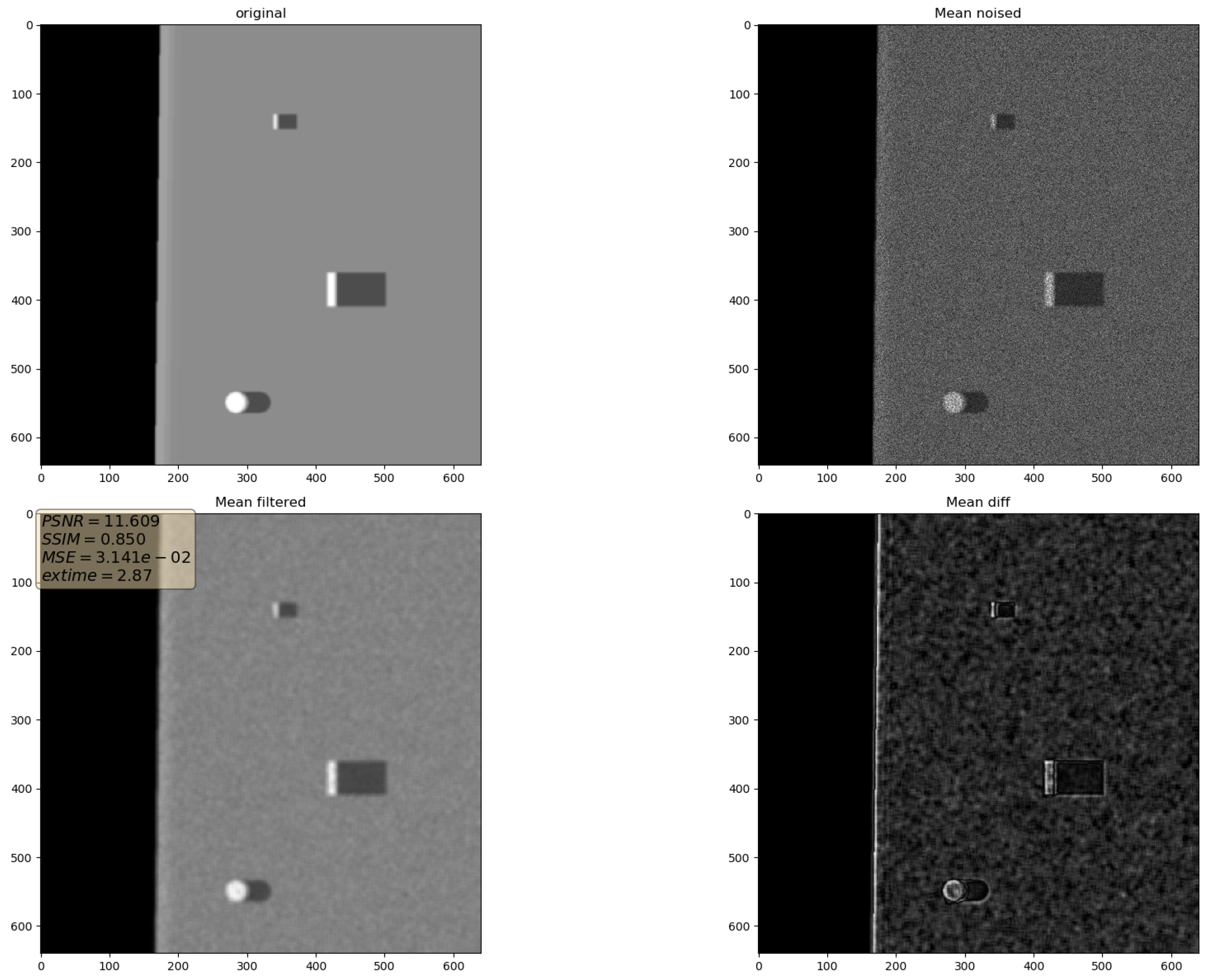
3.1. Average Filter
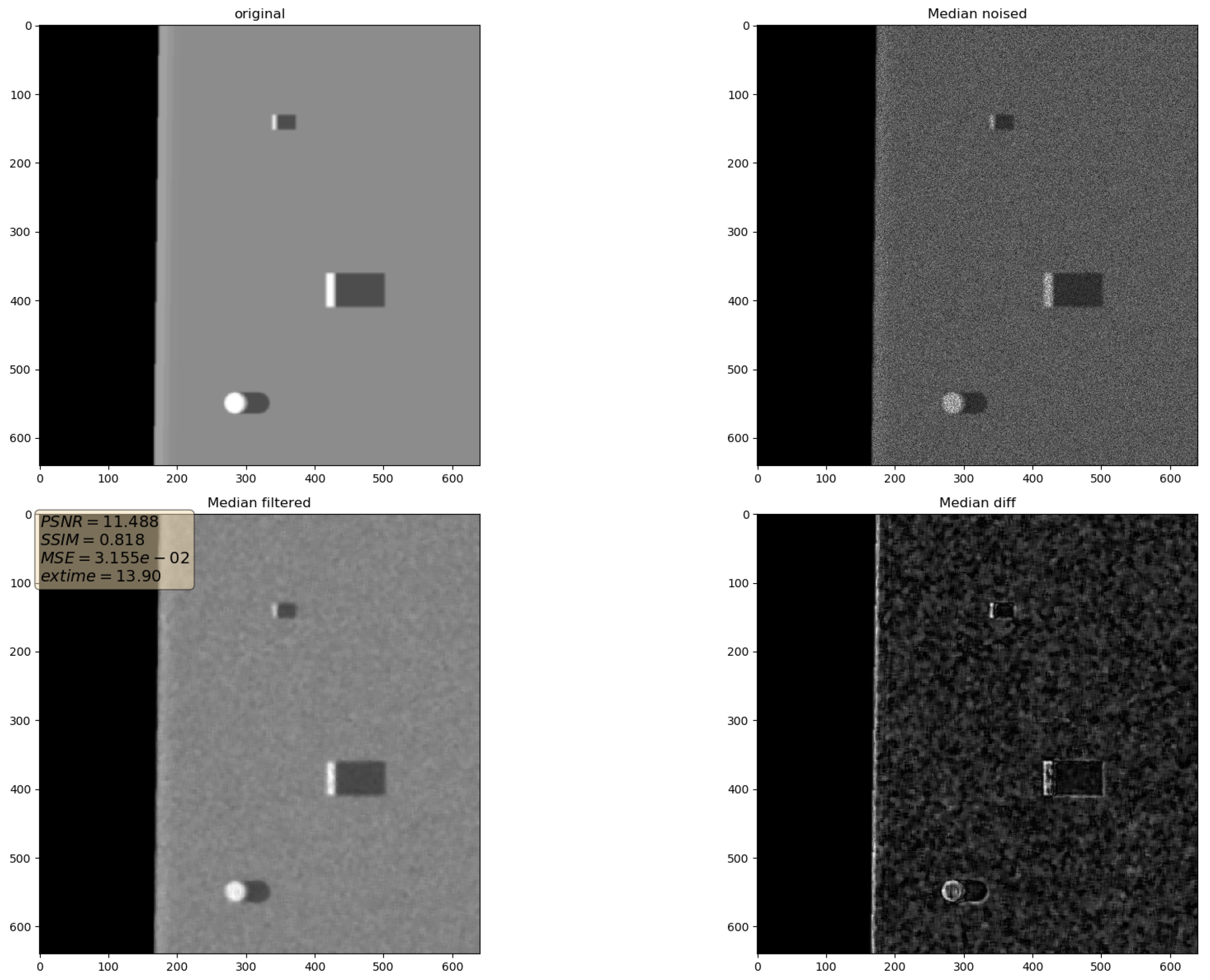
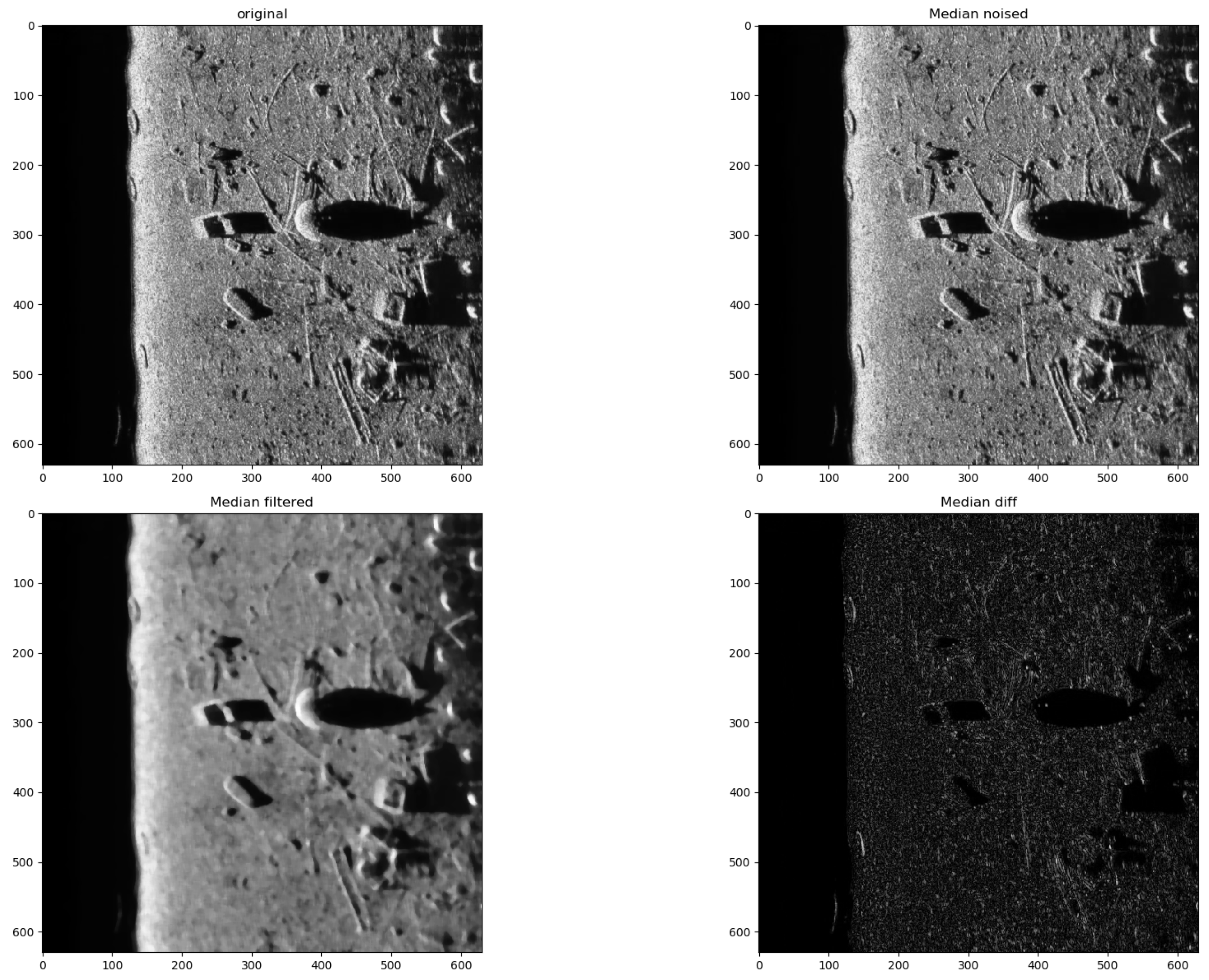
3.2. Median Filter
- Take an kernel centered around a pixel .
- Sort the intensity values of the pixels in the kernel into ascending order.
- Select the middle value as the new value for the pixel .
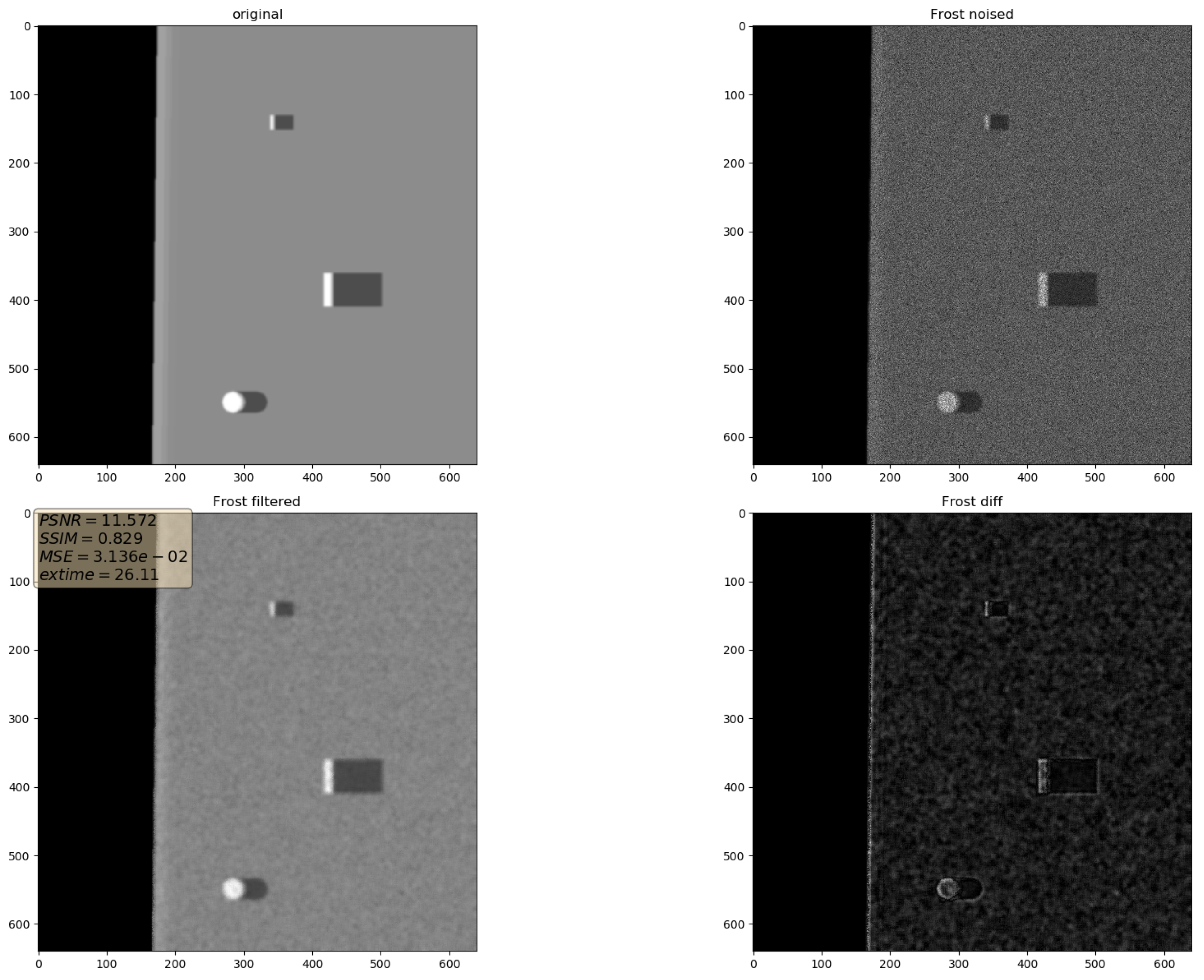
3.3. Frost Filter
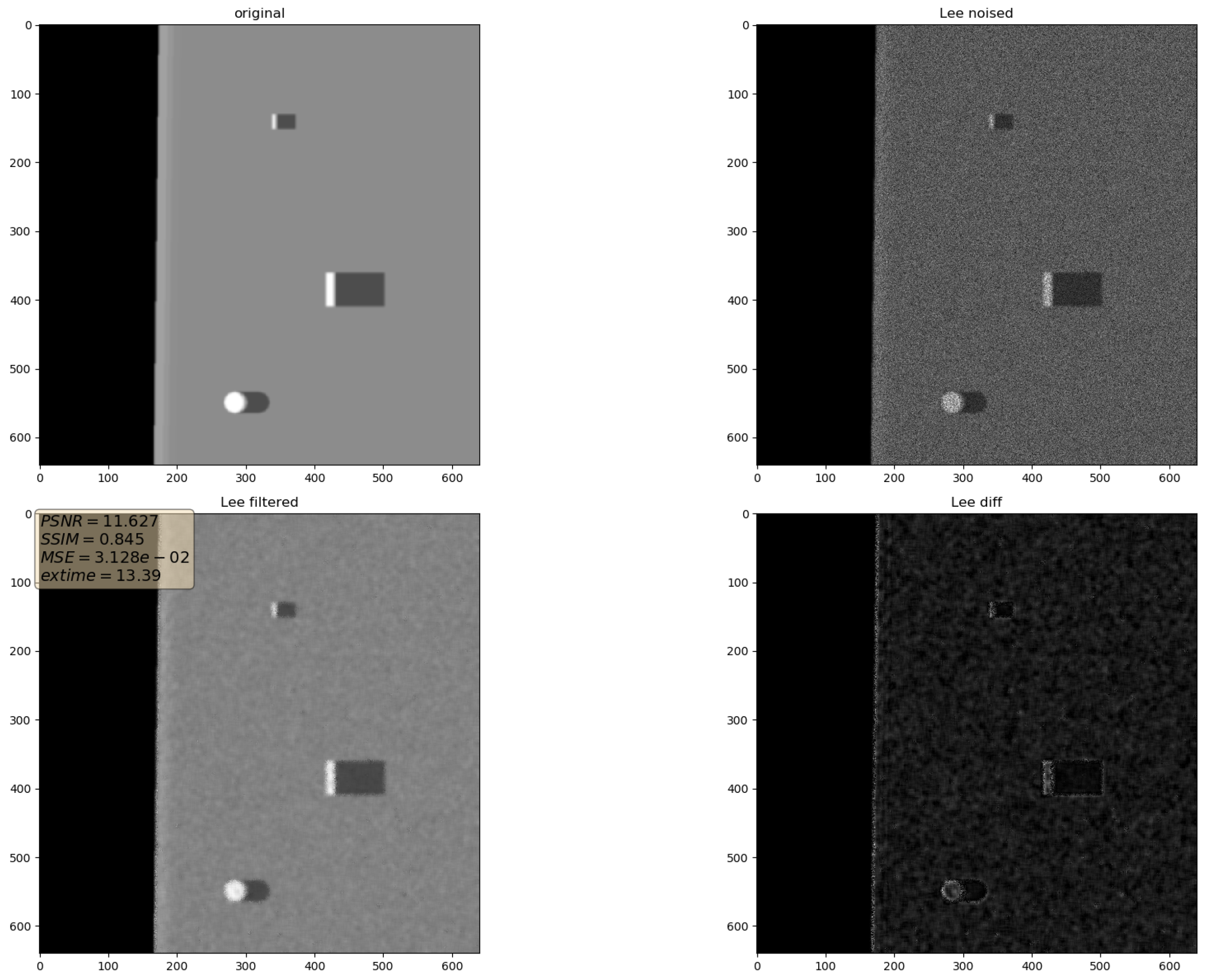
3.4. Lee Filter
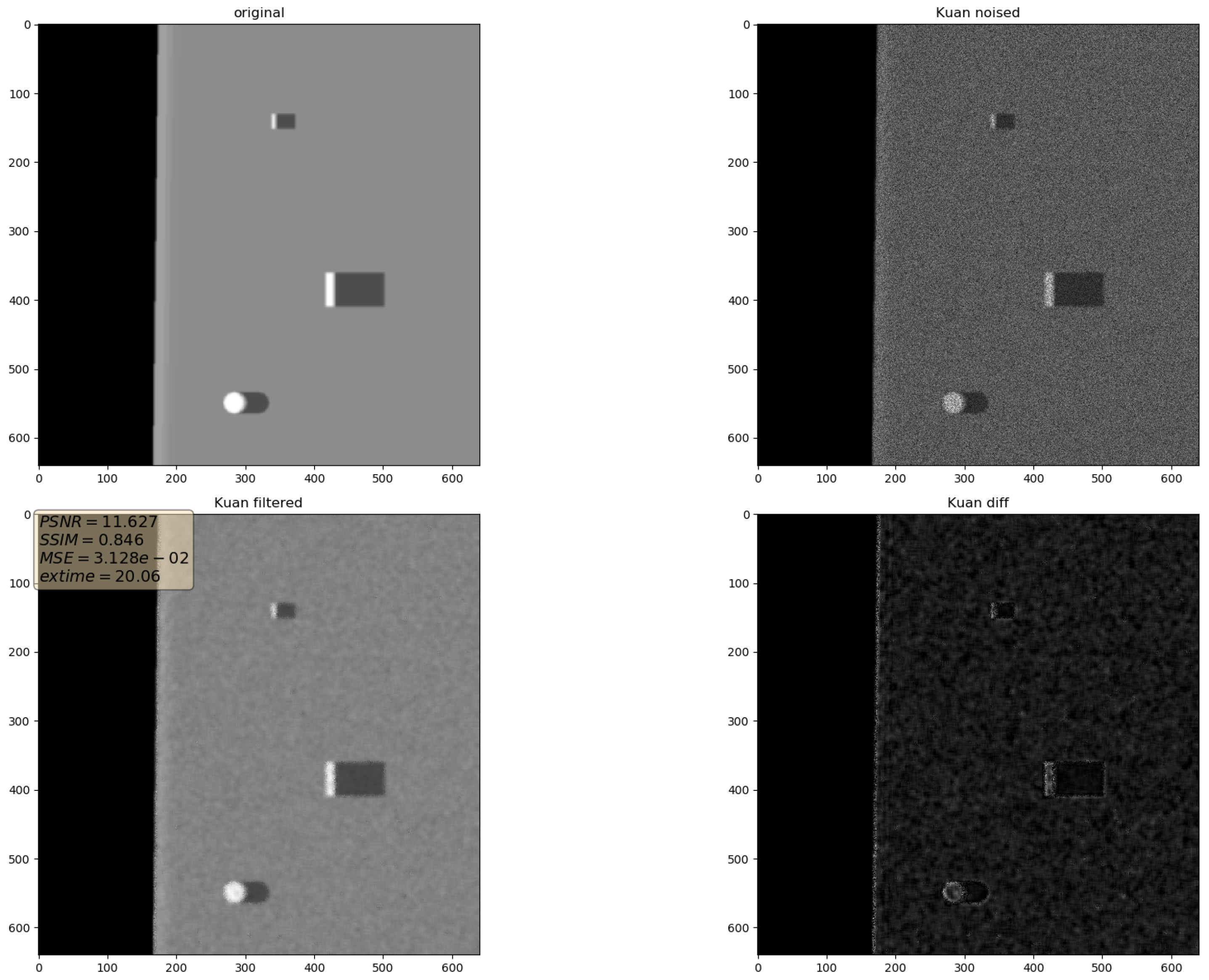
3.5. Kuan Filter
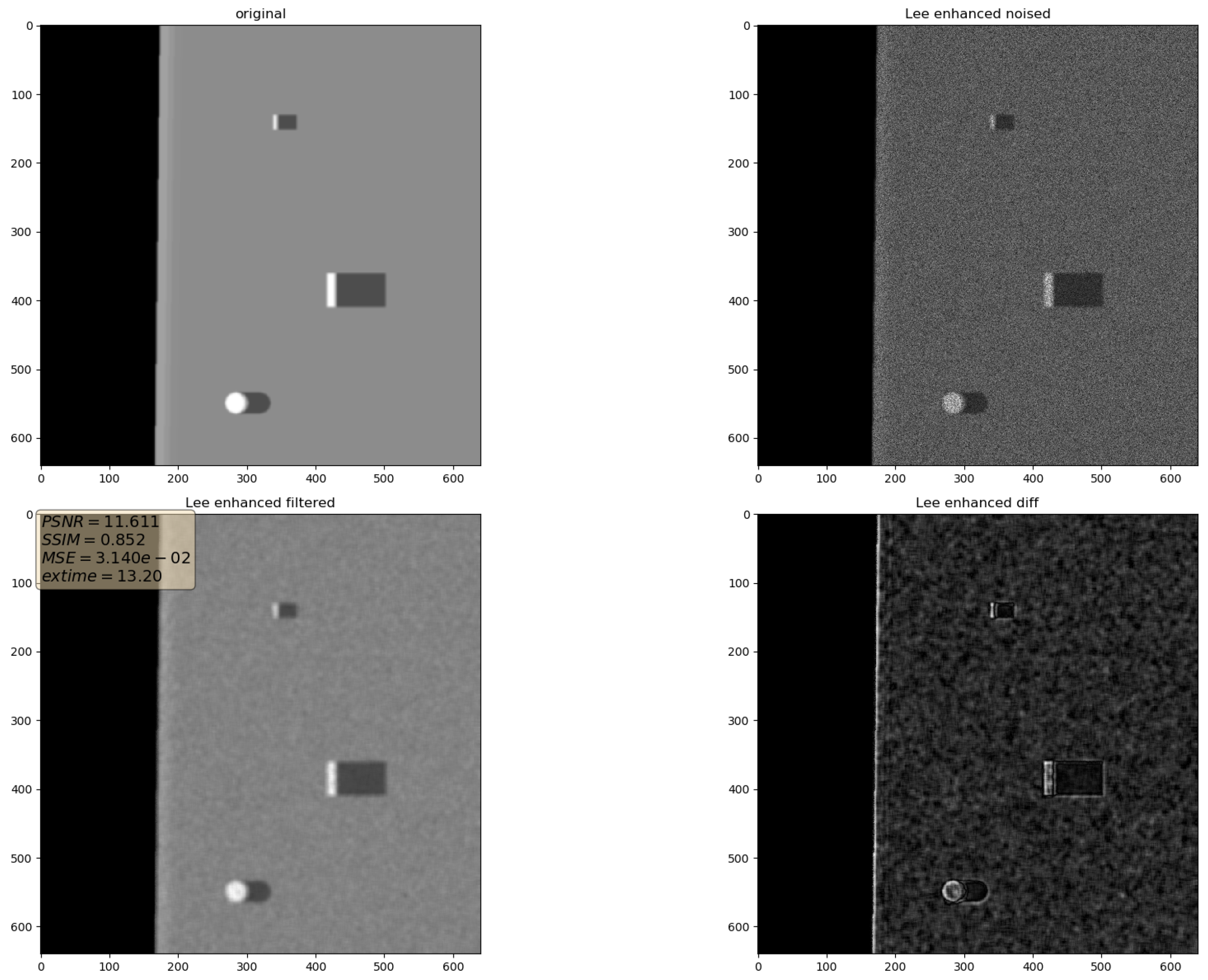
3.6. Enhanced Lee Filter
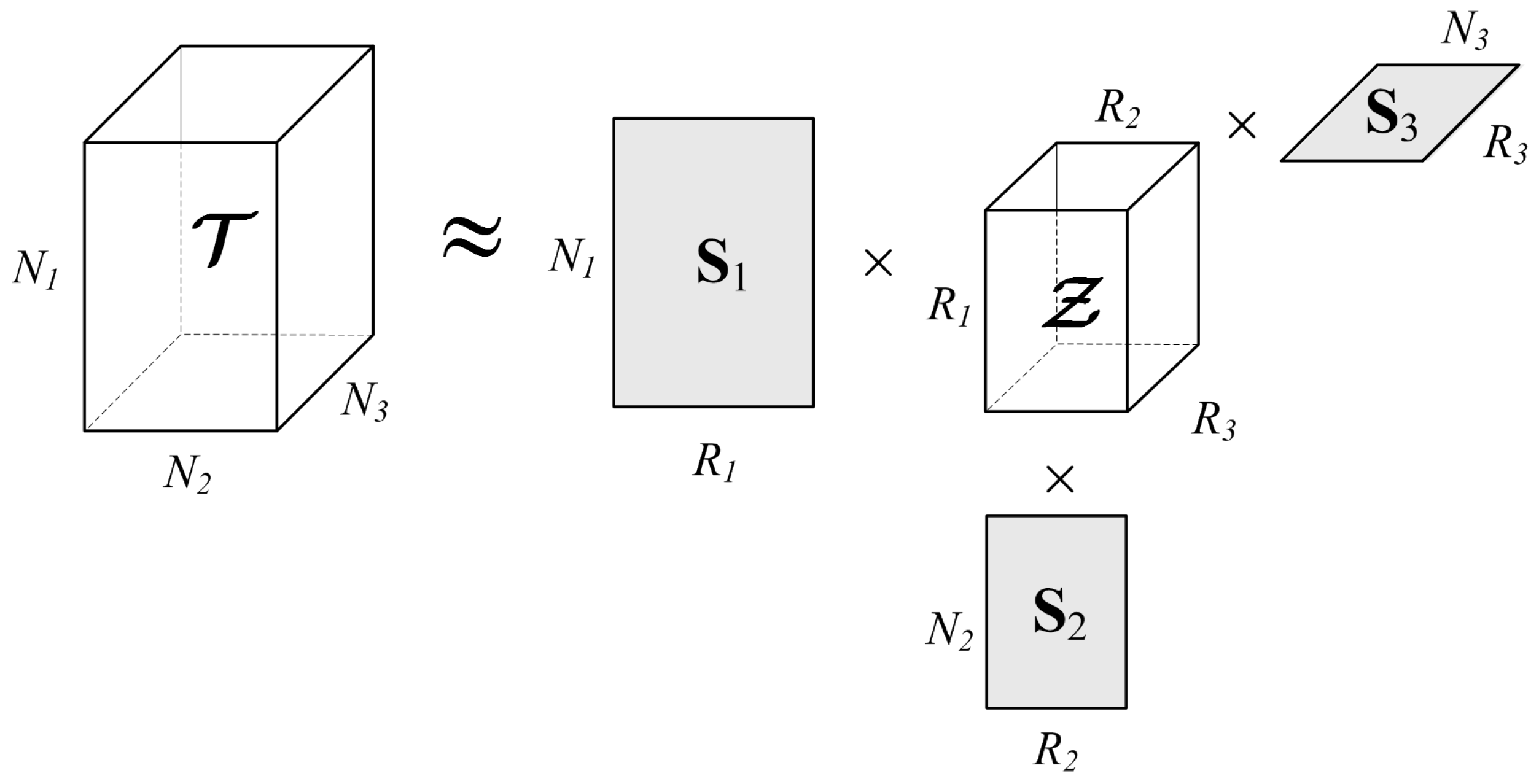
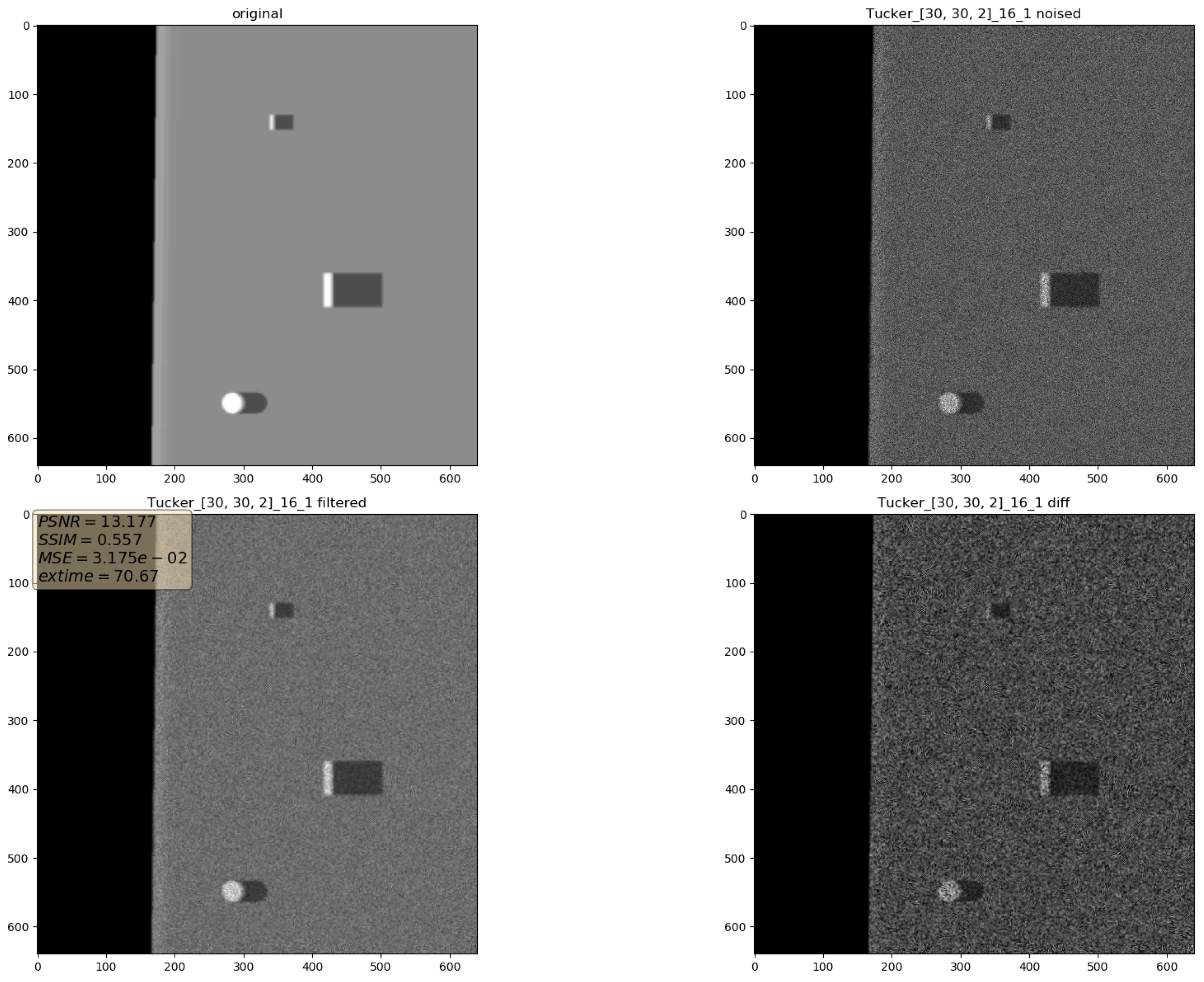
4. Tensor-Based Speckle Noise Filtering
4.1. Multi-Dimensional Signals Filtering in the Tensor Framework
4.2. The Tensor Filtering Algorithm
| Algorithm 1 Tensor assembler. |
|
| Algorithm 2 Filtering algorithm. |
|
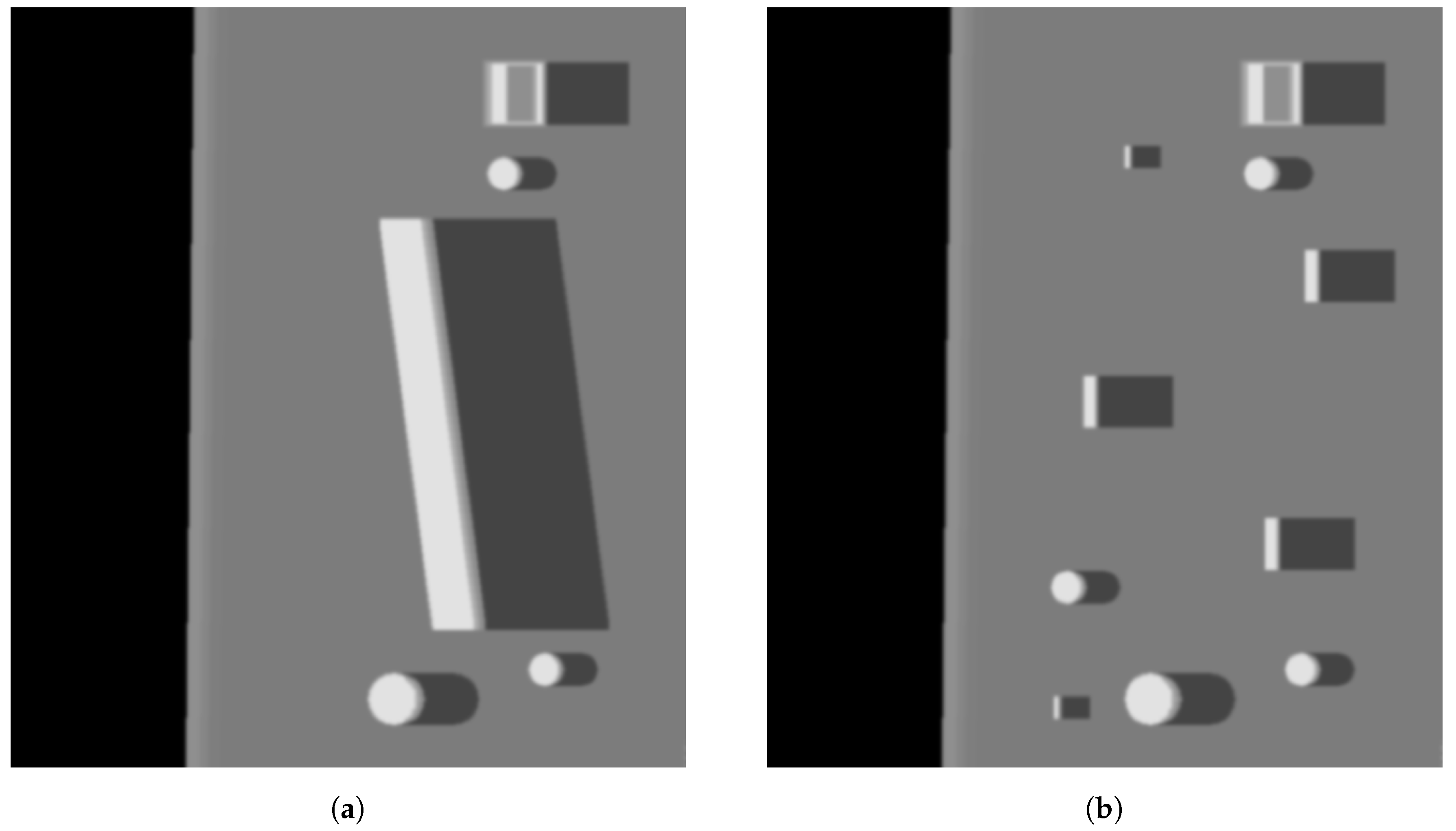
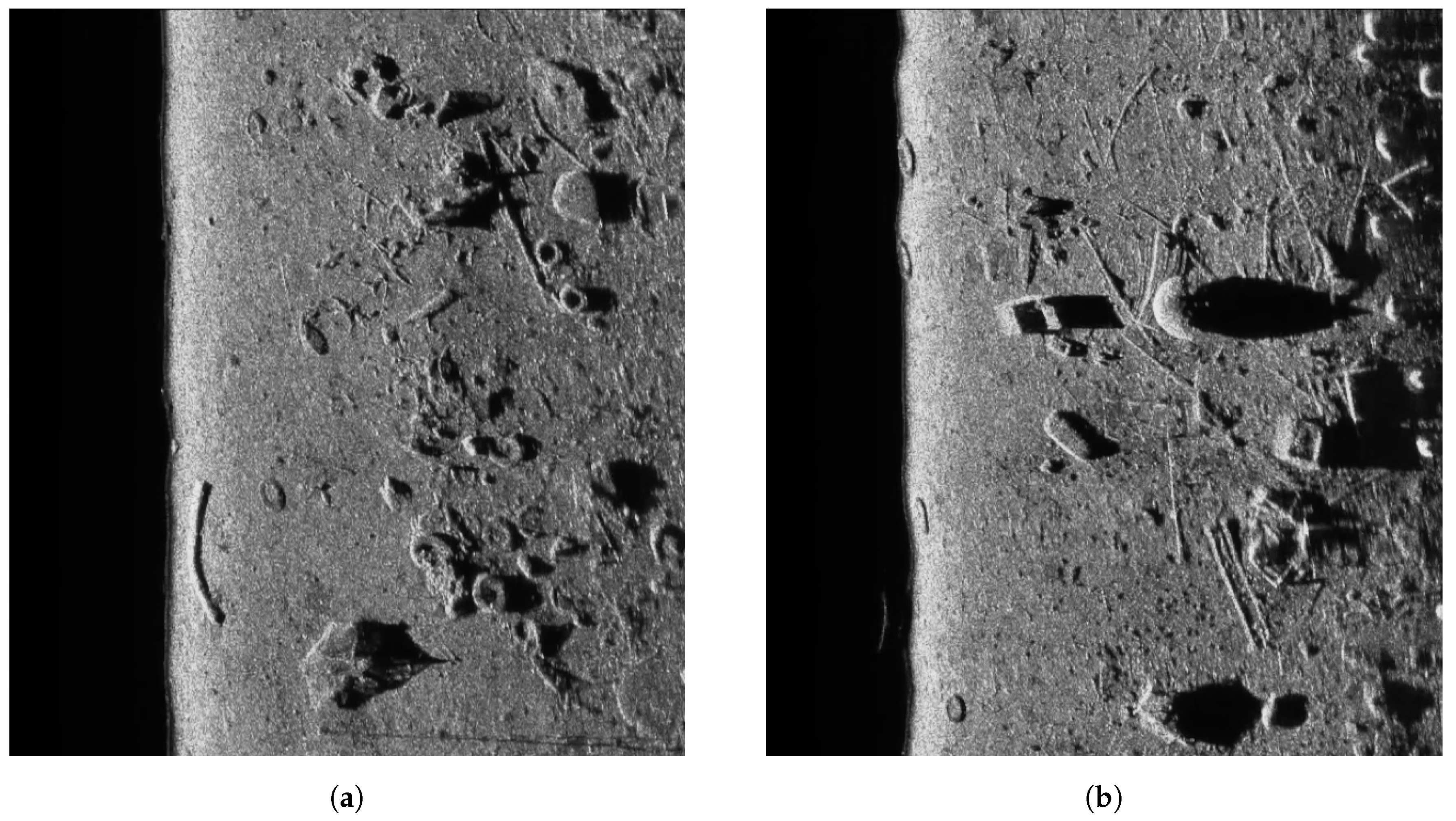
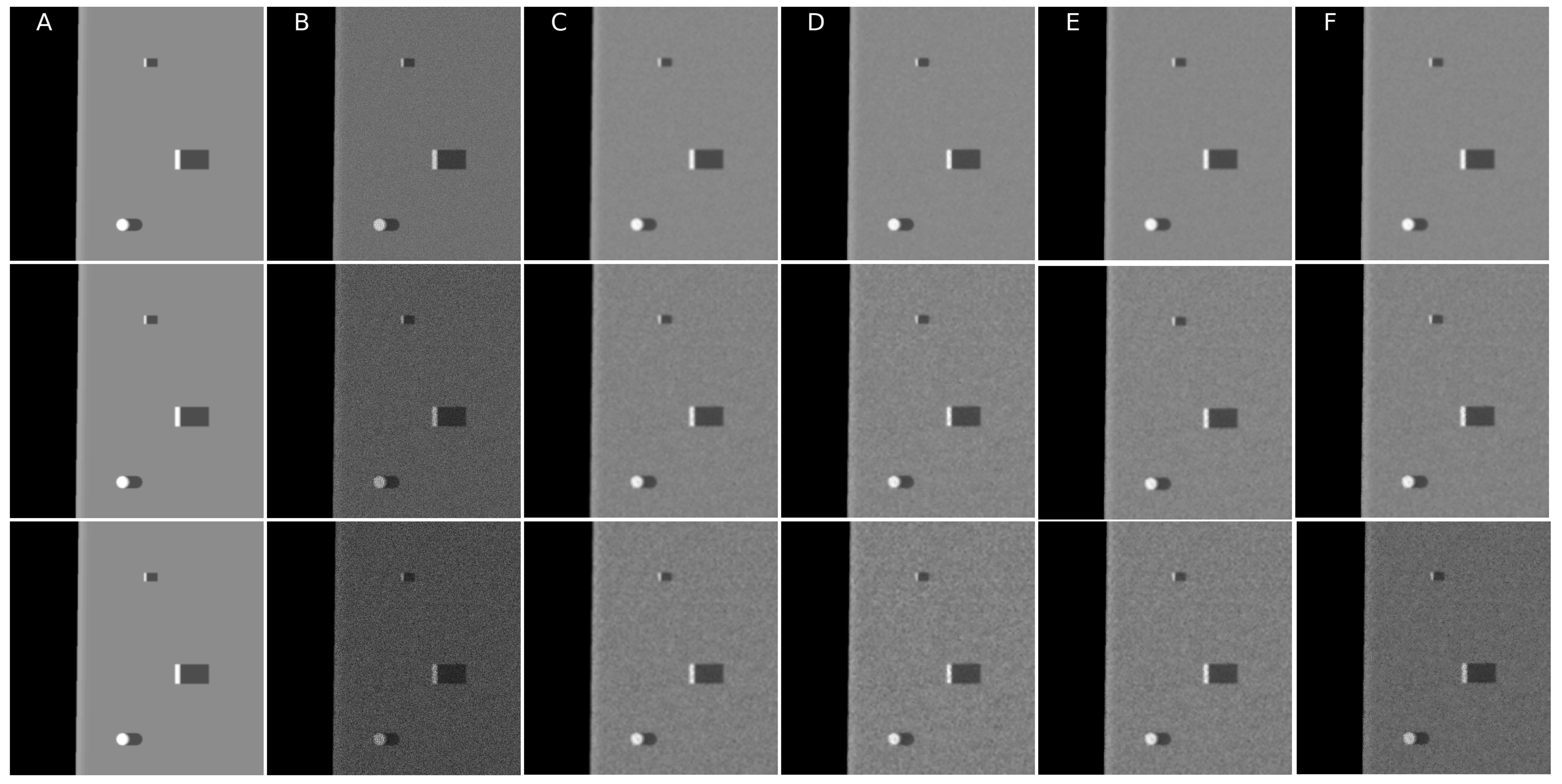
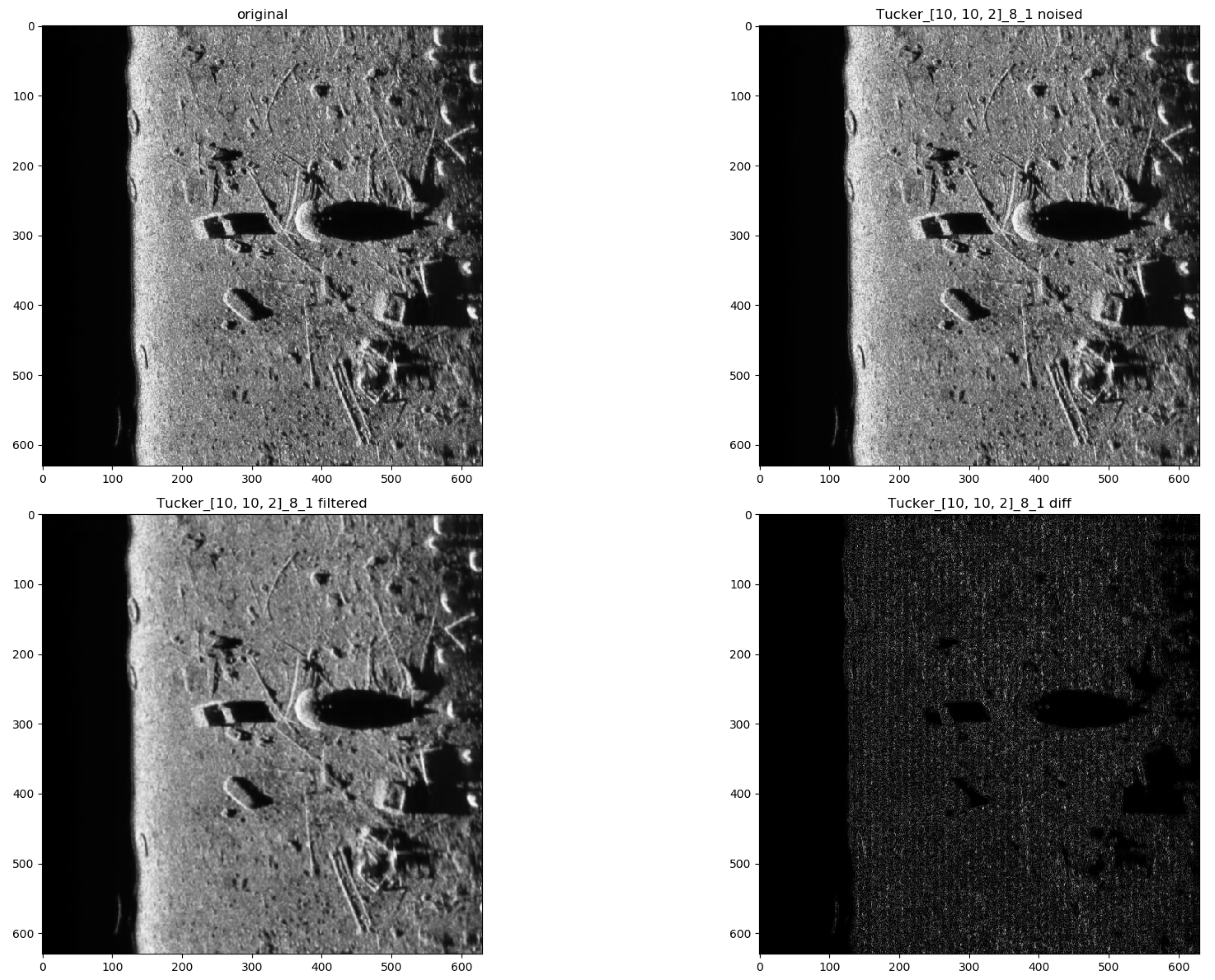
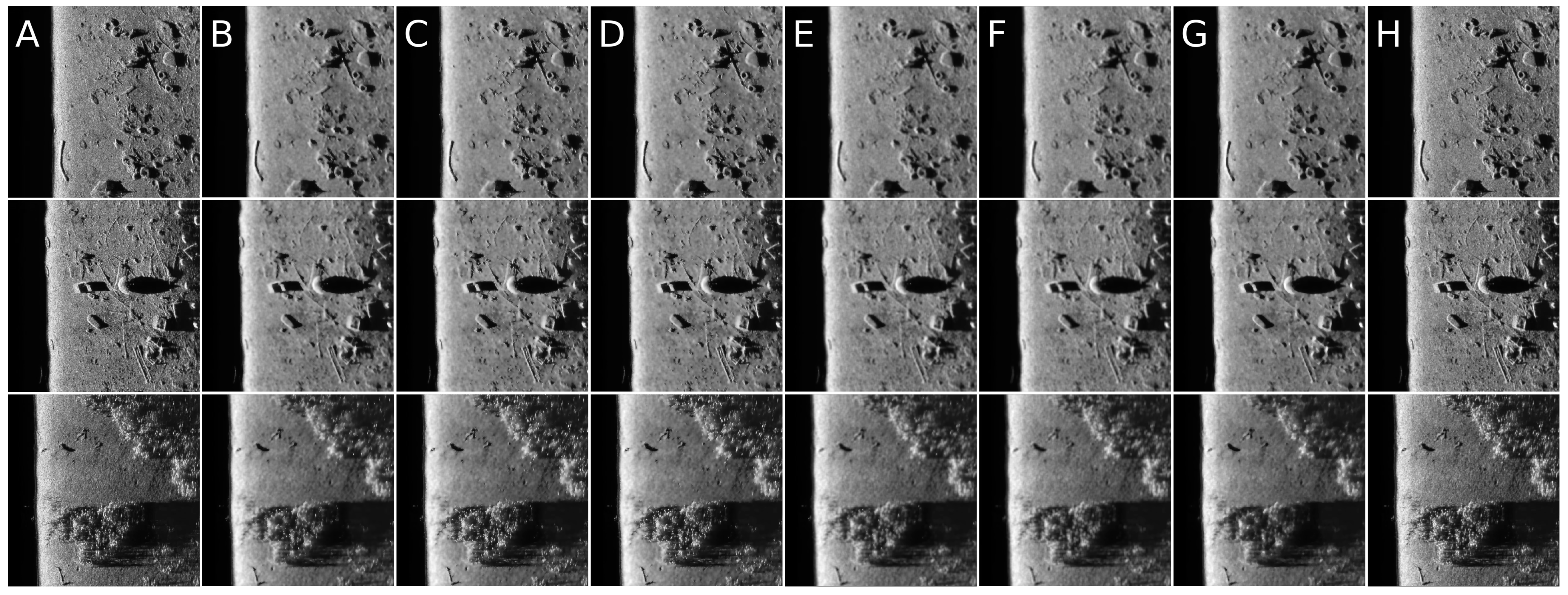
5. Experimental Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Vanithamani, R.; Umamaheswari, G.; Ezhilarasi, M. Modified hybrid median filter for effective speckle reduction in ultrasound images. In Recent Advances in Networking, Vlsi And Signal Processing; World Scientific and Engineering Academy and Society (WSEAS): Stevens Point, WI, USA, 2010; pp. 166–171. [Google Scholar]
- Adabi, S.; Conforto, S.; Clayton, A.; Podoleanu, A.; Hojjat, A.; Avanaki, M. An intelligent speckle reduction algorithm for optical coherence tomography images. In Proceedings of the 2016 4th International Conference on Photonics, Optics and Laser Technology (PHOTOPTICS), Rome, Italy, 27–29 February 2016; pp. 1–6. [Google Scholar]
- Mastriani, M.; Giraldez, A. Enhanced directional smoothing algorithm for edge-preserving smoothing of synthetic-aperture radar images. arXiv 2016, arXiv:1608.01993. [Google Scholar]
- Yu, Y.; Acton, S. Speckle reducing anisotropic diffusion. IEEE Trans. Image Process. 2002, 11, 1260–1270. [Google Scholar] [Green Version]
- Karthikeyan, K.; Rasekar, C. Speckle noise reduction of medical ultrasound images using Bayes shrink wavelet threshold. Int. J. Comput. Appl. 2011, 22, 8–14. [Google Scholar]
- Jaybhay, J.; Shastri, R. A study of speckle noise reduction Filters. Signal Image Process. Int. J. 2015, 6. [Google Scholar] [CrossRef]
- Karabchevsky, S.; Kahana, D.; Ben-harush, O.; Guterman, H. FPGA-based adaptive speckle suppression filter for underwater imaging sonar. IEEE J. Ocean. Eng. 2011, 36, 646–657. [Google Scholar] [CrossRef]
- Maity, A.; Pattanaik, A.; Sagnika, S.; Pani, S. A comparative study on approaches to speckle noise reduction in images. In Proceedings of the 2015 International Conference on Computational Intelligence and Networks, Bhubaneshwar, India, 12–13 January 2015; pp. 148–155. [Google Scholar]
- Cyganek, B. Object Detection and Recognition in Digital Images: Theory and Practice; John Wiley & Sons: New York, NY, USA, 2013. [Google Scholar]
- Lee, J. Digital image enhancement and noise filtering by use of local statistics. IEEE Trans. Pattern Anal. Mach. Intell. 1980, 2, 165–168. [Google Scholar] [CrossRef] [PubMed]
- Narayanan, S.; Wahidabanu, R. A View on Despeckling in Ultrasound Imaging; Citeseer: University Park, PA, USA, 2009. [Google Scholar]
- Huang, Y.; Vangenderen, J. Evaluation of several speckle filtering techniques for ERS-1&2 imagery. Int. Arch. Photogramm. Remote Sens. 1996, 31, 164–169. [Google Scholar]
- Kolda, T.; Bader, B. Tensor Decompositions and Applications. SIAM Rev. 51.3 2009, 51, 455–500. [Google Scholar] [CrossRef]
- Muti, D.; Bourennane, S. Multidimensional filtering based on a tensor approach. Signal Process. 2005, 85, 2338–2353. [Google Scholar] [CrossRef]
- Cyganek, B.; Smołka, B. Real-time framework for tensor-based image enhancement for object classification. Proc. SPIE 2016, 9897, 98970Q. [Google Scholar]
- De Lathauwer, L.; De Moor, B.; Vandewalle, J. On the best rank-1 and rank-(R1, R2, …, Rn) approximation of higher-order tensors. Siam J. Matrix Anal. Appl. 2000, 21, 1324–1342. [Google Scholar] [CrossRef]
- Cyganek, B.; Krawczyk, B.; Wozniak, M. Multidimensional Data Classification with Chordal Distance Based Kernel and Support Vector Machines. Eng. Appl. Artif. Intell. 2015, 46, 10–22. [Google Scholar] [CrossRef]
- Cyganek, B.; Wozniak, M. Tensor-Based Shot Boundary Detection in Video Streams. New Gener. Comput. 2017, 35, 311–340. [Google Scholar] [CrossRef] [Green Version]
- Marot, J.; Fossati, C.; Bourennane, S. Fast subspace-based tensor data filtering. In Proceedings of the 2009 16th IEEE International Conference on Image Processing (ICIP), Cairo, Egypt, 7–10 November 2009; pp. 3869–3872. [Google Scholar]
- Kossaifi, J.; Panagakis, Y.; Kumar, A.; Pantic, M. TensorLy: Tensor Learning in Python. arXiv 2018, arXiv:1610.09555. [Google Scholar]
- Grabek, J. Code Repository. Available online: https://github.com/jgrabek/ (accessed on 30 June 2019).
- Gifani, P.; Behnam, H.; Sani, Z. Noise reduction of echo cardiographic images based on temporal information. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2014, 61, 620–630. [Google Scholar] [CrossRef]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef] [PubMed]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | Methods | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Mean | Median | Frost | Lee | Lee Enhanced | Kuan | P1 | P2 | PAuto | ||
| 0.0001 | SSIM | 0.98618 | 0.99462 | 0.99059 | 0.98967 | 0.98871 | 0.98964 | 0.99223 | 0.99595 | 0.9885 |
| PSNR | 33.08012 | 34.28427 | 33.80562 | 33.9245 | 33.23504 | 33.89692 | 34.66237 | 35.536 | 35.59227 | |
| MSE | 4.801 × 10 | 3.701 × 10 | 4.165 × 10 | 4.052 × 10 | 4.655 × 10 | 4.074 × 10 | 3.496 × 10 | 2.932 × 10 | 2.96 × 10 | |
| 0.0005 | SSIM | 0.9832 | 0.99067 | 0.98762 | 0.98663 | 0.98567 | 0.98661 | 0.98882 | 0.98155 | 0.96107 |
| PSNR | 27.7841 | 28.15245 | 28.01909 | 28.06141 | 27.83237 | 28.05204 | 28.42009 | 28.75497 | 28.86646 | |
| MSE | 1.550 × 10 | 1.435 × 10 | 1.478 × 10 | 1.469 × 10 | 1.536 × 10 | 1.472 × 10 | 1.381 × 10 | 1.335 × 10 | 1.348 × 10 | |
| 0.001 | SSIM | 0.97971 | 0.98621 | 0.98424 | 0.98303 | 0.98208 | 0.98303 | 0.9847 | 0.96531 | 0.93043 |
| PSNR | 25.1087 | 25.32174 | 25.24272 | 25.27095 | 25.1348 | 25.26519 | 25.54454 | 25.89716 | 26.05117 | |
| MSE | 2.723 × 10 | 2.613 × 10 | 2.649 × 10 | 2.638 × 10 | 2.710 × 10 | 2.641 × 10 | 2.533 × 10 | 2.499 × 10 | 2.527 × 10 | |
| 0.005 | SSIM | 0.95713 | 0.95753 | 0.9612 | 0.96007 | 0.9592 | 0.96011 | 0.95523 | 0.87239 | 0.83173 |
| PSNR | 18.51647 | 18.58405 | 18.55519 | 18.56429 | 18.52239 | 18.56241 | 18.74906 | 19.55913 | 19.675 | |
| MSE | 9.949 × 10 | 9.900 × 10 | 9.876 × 10 | 9.854 × 10 | 9.938 × 10 | 9.858 × 10 | 9.704 × 10 | 9.746 × 10 | 9.787 × 10 | |
| 0.01 | SSIM | 0.93345 | 0.92814 | 0.93689 | 0.93593 | 0.93518 | 0.93601 | 0.92394 | 0.79781 | 0.74624 |
| PSNR | 15.61236 | 15.65576 | 15.63202 | 15.64155 | 15.61553 | 15.64034 | 15.85178 | 16.95285 | 17.12022 | |
| MSE | 1.670 × 10 | 1.672 × 10 | 1.663 × 10 | 1.660 × 10 | 1.669 × 10 | 1.661 × 10 | 1.644 × 10 | 1.655 × 10 | 1.664 × 10 | |
| 0.05 | SSIM | 0.80955 | 0.78359 | 0.79237 | 0.80542 | 0.81024 | 0.80592 | 0.76942 | 0.57621 | 0.64057 |
| PSNR | 9.02068 | 9.11328 | 9.04919 | 9.16097 | 9.02168 | 9.12861 | 9.43093 | 11.63039 | 11.47503 | |
| MSE | 4.618 × 10 | 4.643 × 10 | 4.616 × 10 | 4.607 × 10 | 4.617 × 10 | 4.608 × 10 | 4.591 × 10 | 4.635 × 10 | 4.605 × 10 | |
| 0.1 | SSIM | 0.71967 | 0.68468 | 0.63478 | 0.48404 | 0.71972 | 0.49222 | 0.66803 | 0.48759 | 0.54534 |
| PSNR | 6.29977 | 6.40971 | 6.45613 | 9.15216 | 6.3006 | 8.96839 | 6.88114 | 9.69316 | 9.4846 | |
| MSE | 6.521 × 10 | 6.557 × 10 | 6.529 × 10 | 6.579 × 10 | 6.520 × 10 | 6.571 × 10 | 6.496 × 10 | 6.561 × 10 | 6.520 × 10 | |
| Parameter | P1 Value | P2 Value |
|---|---|---|
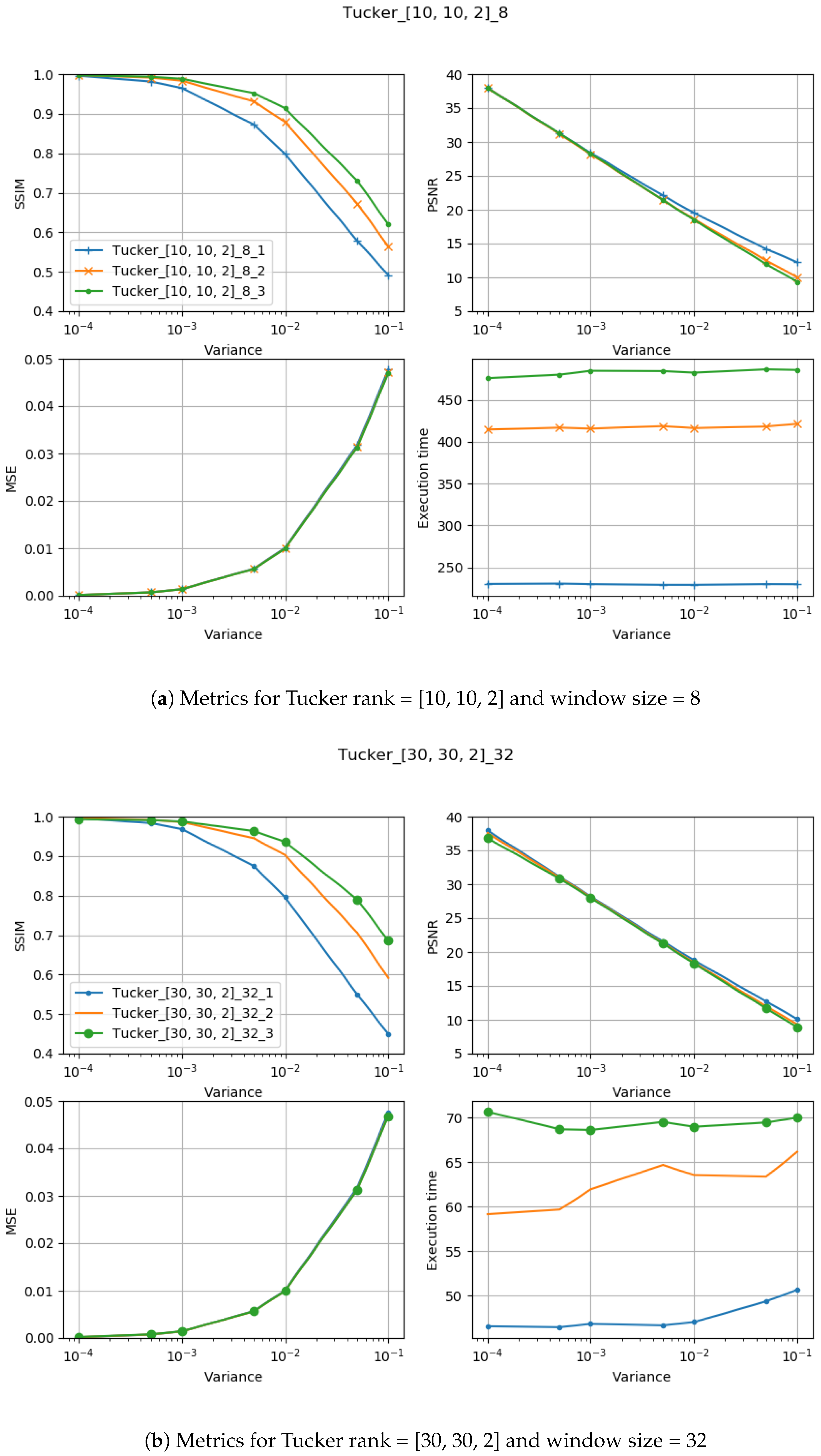
| Tucker rank | 30, 30, 2 | 10, 10, 2 |
| Window size | 32 | 8 |
| Close neighbor distance (CND) | 3 | 1 |
| Method | Mean | Median | Frost | Lee | Lee Enhanced | Kuan | P1 | P2 | PAuto |
|---|---|---|---|---|---|---|---|---|---|
| Average time [s] | 2.86 | 13.83 | 26.06 | 13.42 | 13.29 | 20.12 | 69.44 | 482.34 | 448.52 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Grabek, J.; Cyganek, B. Speckle Noise Filtering in Side-Scan Sonar Images Based on the Tucker Tensor Decomposition. Sensors 2019, 19, 2903. https://doi.org/10.3390/s19132903
Grabek J, Cyganek B. Speckle Noise Filtering in Side-Scan Sonar Images Based on the Tucker Tensor Decomposition. Sensors. 2019; 19(13):2903. https://doi.org/10.3390/s19132903
Chicago/Turabian StyleGrabek, Jakub, and Bogusław Cyganek. 2019. "Speckle Noise Filtering in Side-Scan Sonar Images Based on the Tucker Tensor Decomposition" Sensors 19, no. 13: 2903. https://doi.org/10.3390/s19132903
APA StyleGrabek, J., & Cyganek, B. (2019). Speckle Noise Filtering in Side-Scan Sonar Images Based on the Tucker Tensor Decomposition. Sensors, 19(13), 2903. https://doi.org/10.3390/s19132903