An AutoEncoder and LSTM-Based Traffic Flow Prediction Method

Abstract
:1. Introduction
- We propose an AE-LSTM model to predict traffic flow. This method combines AutoEncoder with LSTM, where AutoEncoder is used for feature extraction and LSTM model is used for data prediction.
- We propose a traffic flow prediction algorithm based on AE-LSTM. The AutoEncoder and LSTM network are trained, respectively. Then, we fine-tune the whole network.
- We evaluated the performance of AE-LSTM by experiments. We conducted AE-LSTM on real datasets, and experimental results show that the performance of AE-LSTM was better than the other prediction methods.
2. Related Work
3. Methodology
3.1. AutoEncoder Model
3.2. AE-LSTM Model
- The encoder of the AutoEncoder is used as the feature extractor to obtain the characteristics of upstream and downstream traffic flow data. The extracted features are put into the prediction network. Considering the influence of upstream and downstream on the traffic flow at the current location, the accuracy of traffic flow prediction can be improved.
- The characteristics of upstream and downstream traffic flow and the traffic flow data of the current position are combined as the input of LSTM. LSTM model predicts the traffic flow data at the next moment.
4. Model Implementation
| Algorithm 1 AE-LSTM prediction algorithm. |
| Input: the training set . |
| Output: prediction result . |
|
5. Experimental and Analysis
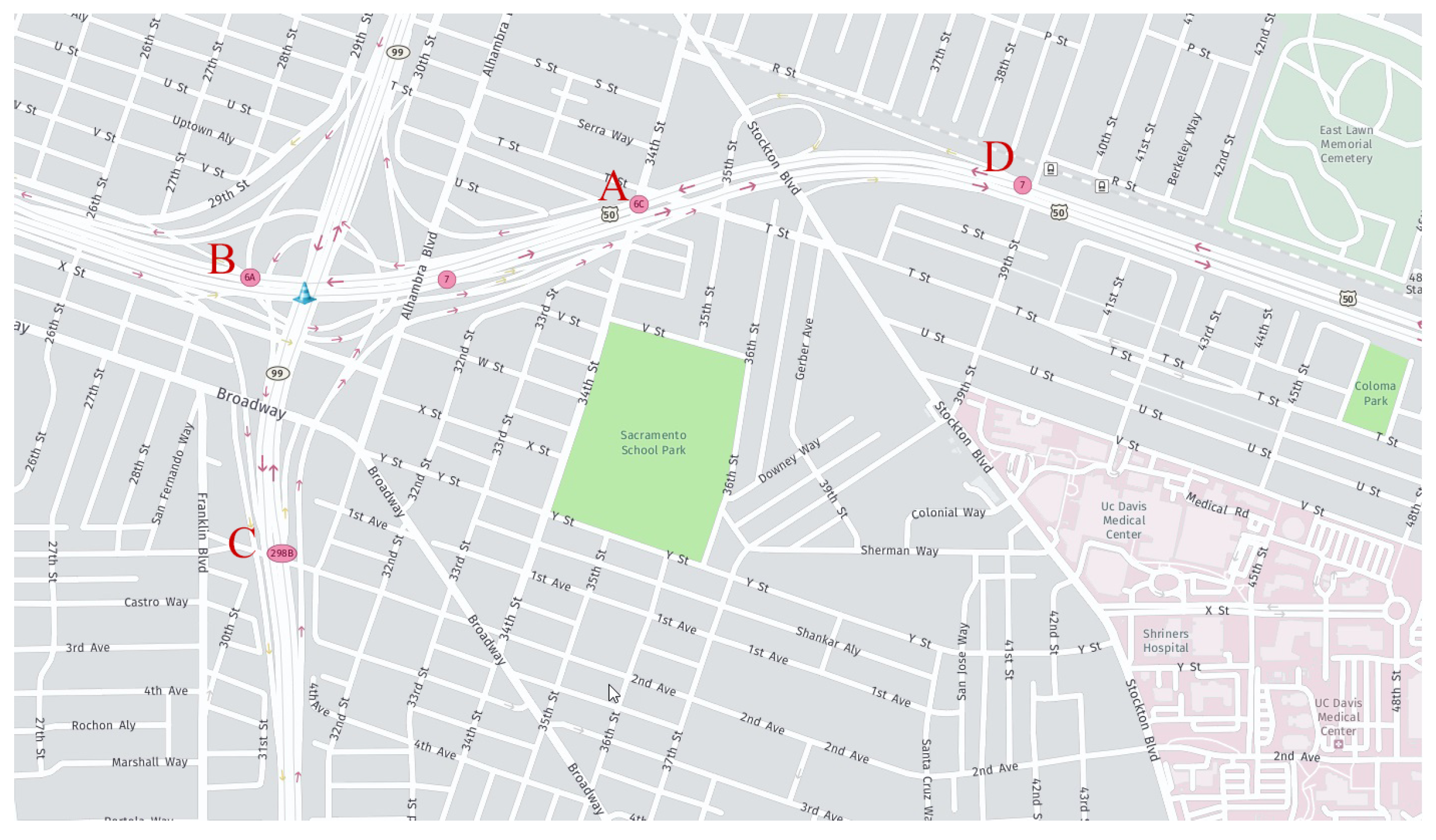
5.1. Data Collection from Caltrans Performance Measurement System
5.2. Experimental Setup
5.3. Model Evaluation
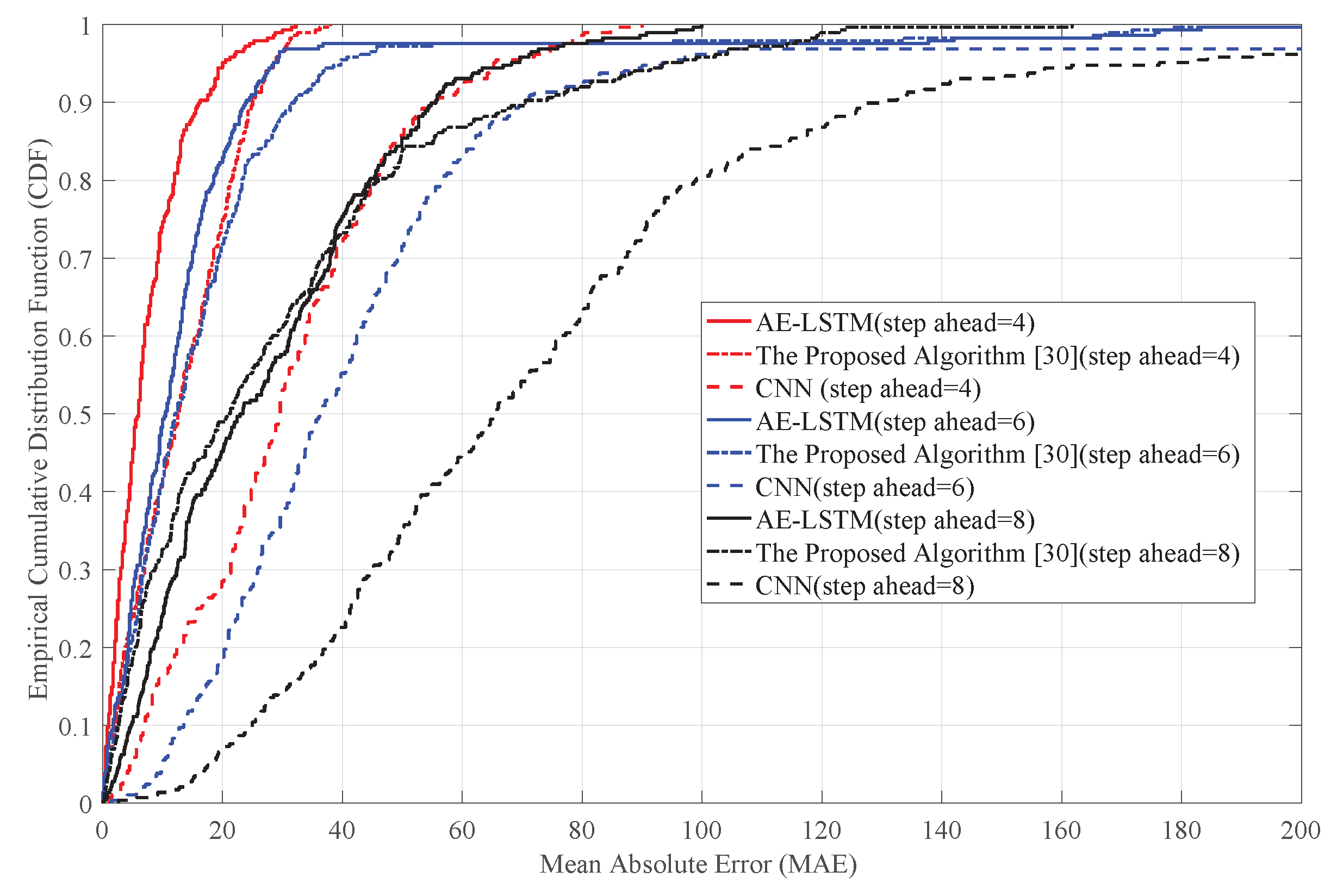
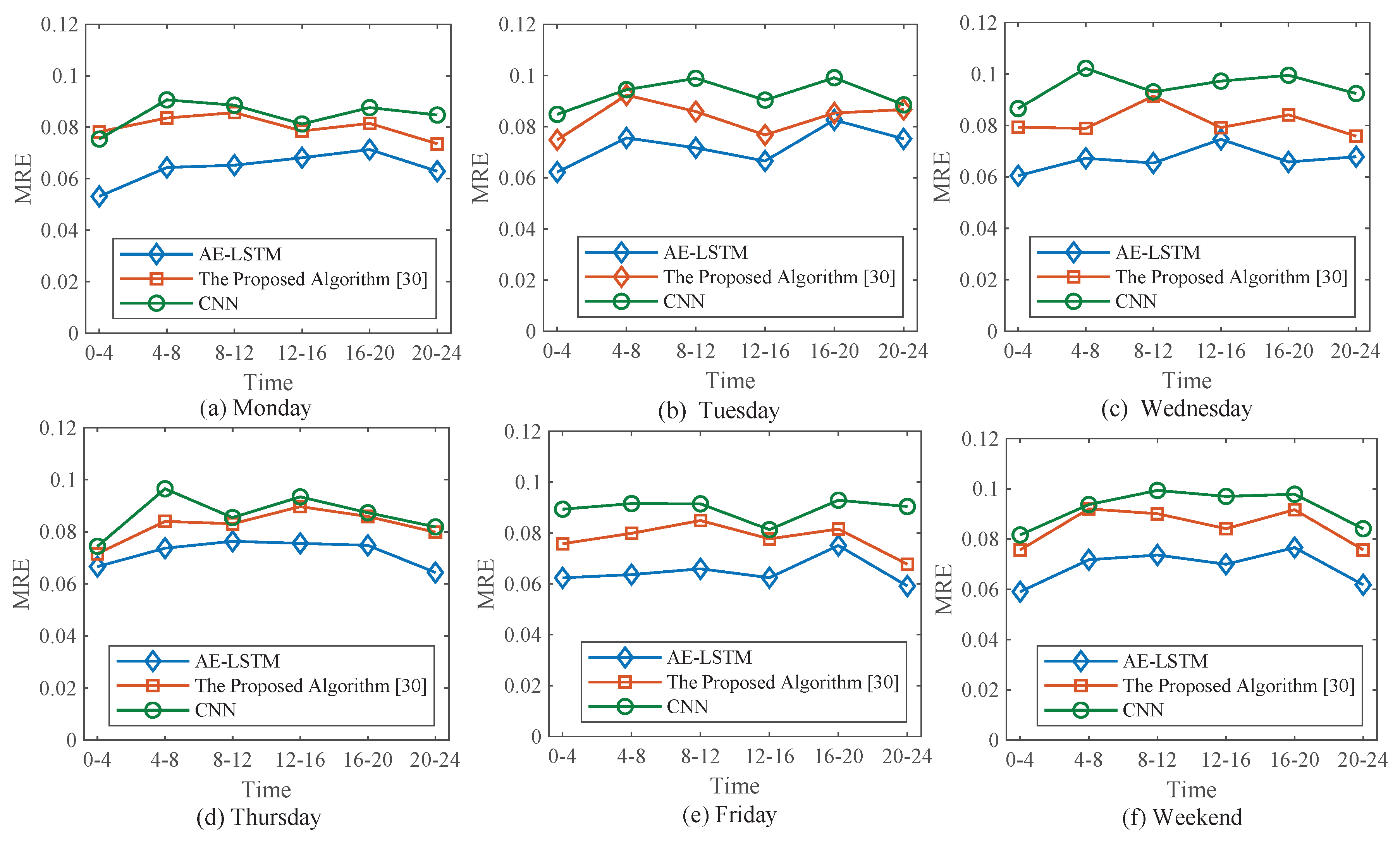
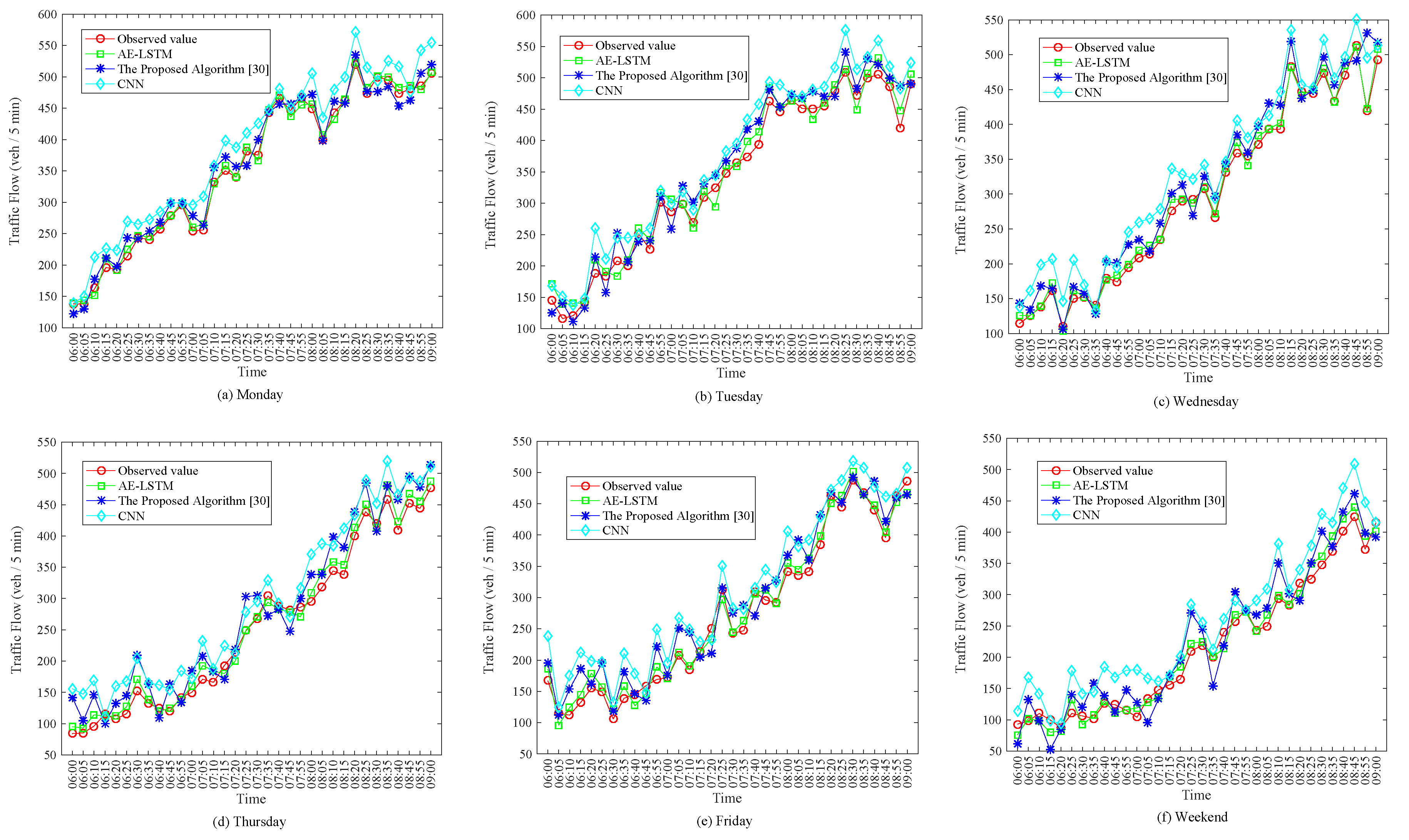
5.4. Experimental Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ai, Z.; Zhou, Y.; Song, F. A Smart Collaborative Routing Protocol for Reliable Data Diffusion in IoT Scenarios. Sensors 2018, 18, 1926. [Google Scholar] [CrossRef] [PubMed]
- Zhang, M.; Quan, W.; Cheng, N.; Wu, Q.; Zhu, J.; Zheng, R.; Li, K. Distributed Conditional Gradient Online Learning for IoT Optimization. IEEE Internet Things J. 2019. [Google Scholar] [CrossRef]
- Wang, F.Y. Parallel Control and Management for Intelligent Transportation Systems: Concepts, Architectures, and Applications. IEEE Trans. Intell. Transp. Syst. 2010, 11, 630–638. [Google Scholar] [CrossRef]
- Kong, Q.J.; Xu, Y.; Lin, S.; Wen, D.; Zhu, F.; Liu, Y. UTN-Model-Based Traffic Flow Prediction for Parallel-Transportation Management Systems. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1541–1547. [Google Scholar] [CrossRef]
- Sims, A.; Dobinson, K.W. The Sydney coordinated adaptive traffic (SCAT) system philosophy and benefits. IEEE Trans. Veh. Technol. 1980, 29, 130–137. [Google Scholar] [CrossRef]
- Williams, B.M.; Durvasula, P.K.; Brown, D.E. Urban freeway travel prediction: Application of seasonal ARIMA and exponential smoothing models. Transp. Res. Record J. Transp. Res. Board 1998, 1644, 132–141. [Google Scholar] [CrossRef]
- Okutani, I.; Stephanedes, Y.J. Dynamic prediction of traffic volume through Kalman filtering theory. Transp. Res. Part B Methodol. 1984, 18, 1–11. [Google Scholar] [CrossRef]
- Xie, Y.; Zhang, Y.; Ye, Z. Short-Term Traffic Volume Forecasting Using Kalman Filter with Discrete Wavelet Decomposition. Comput.-Aided Civ. Infrastruct. Eng. 2007, 22, 326–334. [Google Scholar] [CrossRef]
- Zhang, Y.; Xie, Y. Forecasting of Short-Term Freeway Volume with v-Support Vector Machines. Transp. Res. Record J. Transp. Res. Board 2007, 2024, 92–99. [Google Scholar] [CrossRef]
- Yu, G.; Hu, J.; Zhang, C.; Song, G. Short-term traffic flow forecasting based on Markov chain model. IEEE Intell. Veh. Symp. 2003, 208–212. [Google Scholar] [CrossRef]
- Tan, H.; Xuan, X.; Wu, Y. A Comparison of Traffic Flow Prediction Methods Based on DBN. In Proceedings of the Cota International Conference of Transportation Professionals, Shanghai, China, 6–9 July 2016; pp. 273–283. [Google Scholar]
- Bengio, Y.; Lamblin, P.; Dan, P.; Larochelle, H. Greedy layer-wise training of deep networks. In Proceedings of the Advances in Neural Information Processing Systems, Vancouver, BC, Canada, 4–7 December 2006; pp. 153–160. [Google Scholar]
- Ma, X.; Tao, Z.; Wang, Y.; Yu, H.; Wang, Y. Long short-term memory neural network for traffic speed prediction using remote microwave sensor data. Transp. Res. Part C Emerg. Technol. 2015, 54, 187–197. [Google Scholar] [CrossRef]
- Fu, R.; Zhang, Z.; Li, L. Using LSTM and GRU neural network methods for traffic flow prediction. In Proceedings of the Chinese Association of Automation, Hefei, China, 19–21 May 2017; pp. 324–328. [Google Scholar]
- Wang, J.; Hu, F.; Li, L. Deep Bi-directional Long Short-Term Memory Model for Short-Term Traffic Flow Prediction. In Proceedings of the Neural Information Processing 24th International Conferencevol, Guangzhou, China, 14–18 November 2017; pp. 306–316. [Google Scholar]
- Lv, Y.; Duan, Y.; Kang, W.; Li, Z.; Wang, W.Y. Traffic Flow Prediction With Big Data: A Deep Learning Approach. IEEE Trans. Intell. Transp. Syst. 2015, 16, 865–873. [Google Scholar] [CrossRef]
- Huang, W.; Song, G.; Hong, H.; Xie, K. Deep Architecture for Traffic Flow Prediction: Deep Belief Networks With Multitask Learning. IEEE Trans. Intell. Transp. Syst. 2014, 15, 2191–2201. [Google Scholar] [CrossRef]
- Quan, W.; Cheng, N.; Qin, M.; Zhang, H.; Chan, H.A.; Shen, X. Adaptive Transmission Control for Software Defined Vehicular Networks. IEEE Wirel. Commun. Lett. 2018, 8, 653–656. [Google Scholar] [CrossRef]
- Zhang, M.; Yang, M.; Wu, Q.; Zheng, R.; Zhu, J. Smart perception and autonomic optimization: A novel bio-inspired hybrid routing protocol for MANETs. Future Gen. Comput. Syst. 2018, 81, 505–513. [Google Scholar] [CrossRef]
- Liu, Y.; Yang, Z.; Ning, T.; Wu, H. Efficient Quality-of-Service (QoS) Support in Mobile Opportunistic Networks. IEEE Trans. Veh. Technol. 2014, 63, 4574–4584. [Google Scholar] [CrossRef]
- Williams, B.M.; Hoel, L.A. Modeling and Forecasting Vehicular Traffic Flow as a Seasonal ARIMA Process: Theoretical Basis and Empirical Results. J. Transp. Eng. 2003, 129, 664–672. [Google Scholar] [CrossRef]
- Song, F.; Zhou, Y.; Wang, Y.; Zhao, T.; You, I.; Zhang, H. Smart Collaborative Distribution for Privacy Enhancement in Moving Target Defense. Inf. Sci. 2019, 479, 593–606. [Google Scholar] [CrossRef]
- Williams, B. Multivariate Vehicular Traffic Flow Prediction: Evaluation of ARIMAX Modeling. Transp. Res. Record J. Transp. Res. Board 2013, 1776, 194–200. [Google Scholar] [CrossRef]
- Stathopoulos, A.; Karlaftis, M.G. A multivariate state space approach for urban traffic flow modeling and prediction. Transp. Res. Part C Emerg. Technol. 2013, 11, 121–135. [Google Scholar] [CrossRef]
- Kamarianakis, Y.; Prastacos, P. Space-time modeling of traffic flo. Comput. Geosci. 2005, 31, 119–133. [Google Scholar] [CrossRef]
- Min, W.; Wynter, L. Real-time road traffic prediction with spatio-temporal correlations. Transp. Res. Part C Emerg. Technol. 2011, 19, 606–616. [Google Scholar] [CrossRef]
- Kumar, S.V.; Vanajakshi, L. Short-term traffic flow prediction using seasonal ARIMA model with limited input data. Eur. Transp. Res. Rev. 2015, 7, 21. [Google Scholar] [CrossRef]
- Pan, T.L.; Sumalee, A.; Zhong, R.X.; Payoong, N.I. Short-Term Traffic State Prediction Based on Temporal-Spatial Correlation. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1242–1254. [Google Scholar] [CrossRef]
- Xu, Y.; Kong, Q.J.; Klette, R.; Liu, Y. Accurate and Interpretable Bayesian MARS for Traffic Flow Prediction. IEEE Trans. Intell. Transp. Syst. 2014, 15, 2457–2469. [Google Scholar] [CrossRef]
- Sun, S.; Zhang, C.; Yu, G. A bayesian network approach to traffic flow forecasting. IEEE Trans. Intell. Transp. Syst. 2006, 7, 124–132. [Google Scholar] [CrossRef]
- Qi, Y.; Ishak, S. A Hidden Markov Model for short term prediction of traffic conditions on freeways. Transp. Res. Part C Emerg. Technol. 2014, 43, 95–111. [Google Scholar] [CrossRef]
- Xie, Y.; Zhao, K.; Sun, Y. Gaussian processes for short-term traffic volume forecasting. Transp. Res. Record J. Transp. Res. Board 2010, 2165, 69–78. [Google Scholar] [CrossRef]
- Zhao, J.; Sun, S. High-Order Gaussian Process Dynamical Models for Traffic Flow Prediction. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2014–2019. [Google Scholar] [CrossRef]
- Zheng, X.; Chen, W.; Wang, P.; Shen, D.; Chen, S.; Wang, X.; Zhang, Q.; Yang, L. Big Data for Social Transportation. IEEE Trans. Intell. Transp. Syst. 2016, 17, 620–630. [Google Scholar] [CrossRef]
- Cheng, N.; Lyu, F.; Chen, J.; Xu, W.; Zhou, H.; Zhang, S.; Shen, X. Big Data Driven Vehicular Networks. IEEE Netw. 2018, 32, 160–167. [Google Scholar] [CrossRef] [Green Version]
- Tan, M.C.; Wong, S.C.; Xu, J.M.; Guan, Z.R.; Zhang, P. An aggregation approach to short-term traffic flow prediction. IEEE Trans. Intell. Transp. Syst. 2009, 10, 60–69. [Google Scholar]
- Chen, Q.; Song, X.; Yamada, H.; Shibasaki, R. Learning Deep Representation from Big and Heterogeneous Data for Traffic Accident inference. In Proceedings of the Association for the Advance of Artificial Intelligence, Phoenix, AZ, USA, 12–17 February 2016; pp. 338–344. [Google Scholar]
- Yang, L.; Ma, R.; Zhang, H.M.; Guan, W.; Jiang, S. Driving behavior recognition using EEG data from a simulated car-following experiment. Accident Anal. Prev. 2018, 116, 30–40. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Gu, Q.; Wu, J.; Liu, G.; Xiong, Z. Traffic Speed Prediction and Congestion Source Exploration: A Deep Learning Method. In Proceedings of the 2016 IEEE 16th International Conference on Data Mining (ICDM), Barcelona, Spain, 12–15 December 2016; pp. 499–508. [Google Scholar]
- Wu, Y.; Tan, H.; Qin, L.; Ran, B.; Jiang, Z. A hybrid deep learning based traffic flow prediction method and its understanding. Transp. Res. Part C Emerg. Technol. 2018, 90, 166–180. [Google Scholar] [CrossRef]
- Zhan, H.; Gomes, G.; Li, X.S.; Madduri, K.; Sim, A.; Wu, K. Consensus Ensemble System for Traffic Flow Prediction. IEEE Trans. Intell. Transp. Syst. 2018, 99, 1–12. [Google Scholar] [CrossRef]
- Bengio, Y. Learning deep architectures for AI. Found. Trends Mach. Learn. 2009, 2, 1–127. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Caltrans, Performance Measurement System (PeMS). 2018. Available online: http://pems.dot.ca.gov (accessed on 29 March 2019).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Directional Distance | Controllers | Stations | Detectors | Traffic Census Stations | Features |
|---|---|---|---|---|---|
| 41,236.0 mi | 6943 | 18,350 | 45,170 | 16,527 | Flow, occupancy and speed |
| Algorithm | Step Ahead | Error Value | ||
|---|---|---|---|---|
| RMSE | MAE | MRE | ||
| AE-LSTM | 4 | 26.32 | 16.15 | 0.065 |
| 6 | 28.23 | 20.16 | 0.072 | |
| 8 | 76.87 | 43.15 | 0.131 | |
| The Proposed Algorithm [31] | 4 | 35.45 | 25.26 | 0.088 |
| 6 | 48.16 | 28.48 | 0.125 | |
| 8 | 99.52 | 52.86 | 0.161 | |
| CNN | 4 | 46.22 | 34.59 | 0.011 |
| 6 | 59.24 | 36.21 | 0.195 | |
| 8 | 105.16 | 59.86 | 0.198 | |
| SVM | 4 | 49.54 | 39.02 | 0.023 |
| 6 | 59.24 | 36.21 | 0.211 | |
| 8 | 107.36 | 62.86 | 0.209 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, W.; Wu, H.; Ma, H. An AutoEncoder and LSTM-Based Traffic Flow Prediction Method. Sensors 2019, 19, 2946. https://doi.org/10.3390/s19132946
Wei W, Wu H, Ma H. An AutoEncoder and LSTM-Based Traffic Flow Prediction Method. Sensors. 2019; 19(13):2946. https://doi.org/10.3390/s19132946
Chicago/Turabian StyleWei, Wangyang, Honghai Wu, and Huadong Ma. 2019. "An AutoEncoder and LSTM-Based Traffic Flow Prediction Method" Sensors 19, no. 13: 2946. https://doi.org/10.3390/s19132946
APA StyleWei, W., Wu, H., & Ma, H. (2019). An AutoEncoder and LSTM-Based Traffic Flow Prediction Method. Sensors, 19(13), 2946. https://doi.org/10.3390/s19132946