Refactoring and Optimization of Bridge Dynamic Displacement Based on Ensemble Empirical Mode Decomposition

Abstract
:1. Introduction
2. Acceleration Integral and EEMD Algorithm
2.1. Acceleration Integral Calculation Displacement Principle
2.2. EEMD Algorithm
- The extreme point and the zero crossing of the signal are equal or at most one different:
- At any point, the mean of the envelope defined by the local maxima and the envelope defined by the local minima is zero:
- Add a white noise sequence to the target data:
- Decompose the white noise-added data into multiple IMF components:
- Repeat steps (1) to (2), and add a white noise sequence different from (1) to the target data:
- Obtain the (total) mean of the corresponding multiple IMFs as the final result:where represents the IMF component obtained by EEMD decomposing the signal after adding white noise sequence; represents the residual of the signal EEMD after adding white noise sequence; represents the IMF component obtained by EEMD decomposing the signal after adding the i-th white noise sequence; represents the residual of the signal EEMD after adding the i-th white noise sequence; represents the total number; represents the number of IMF components.
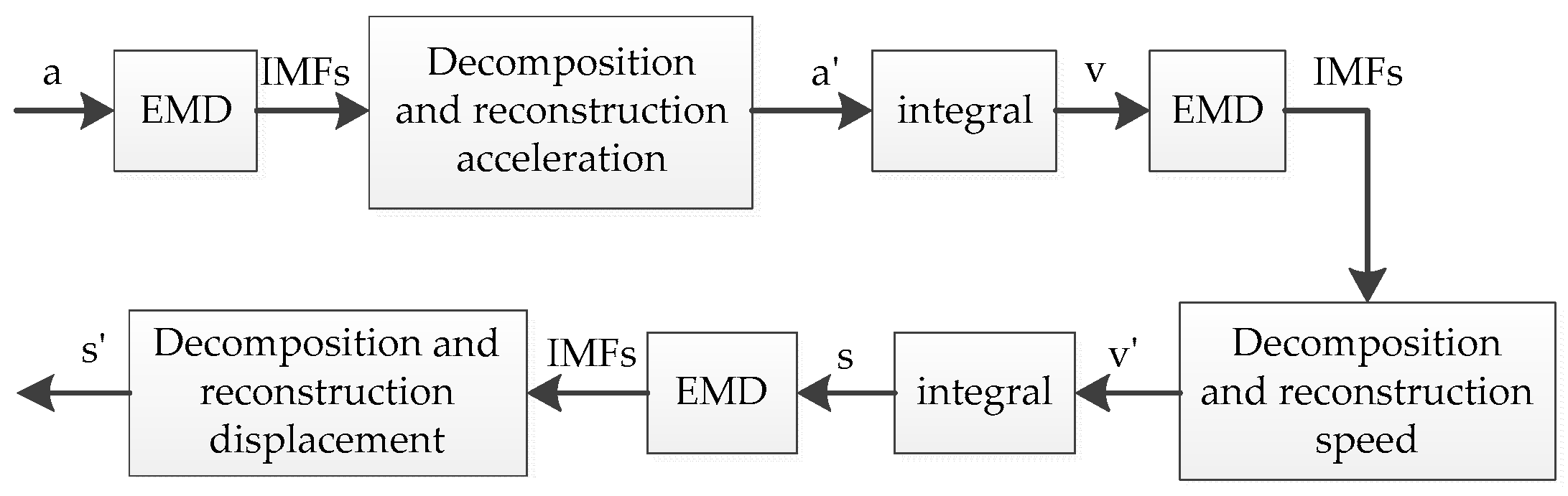
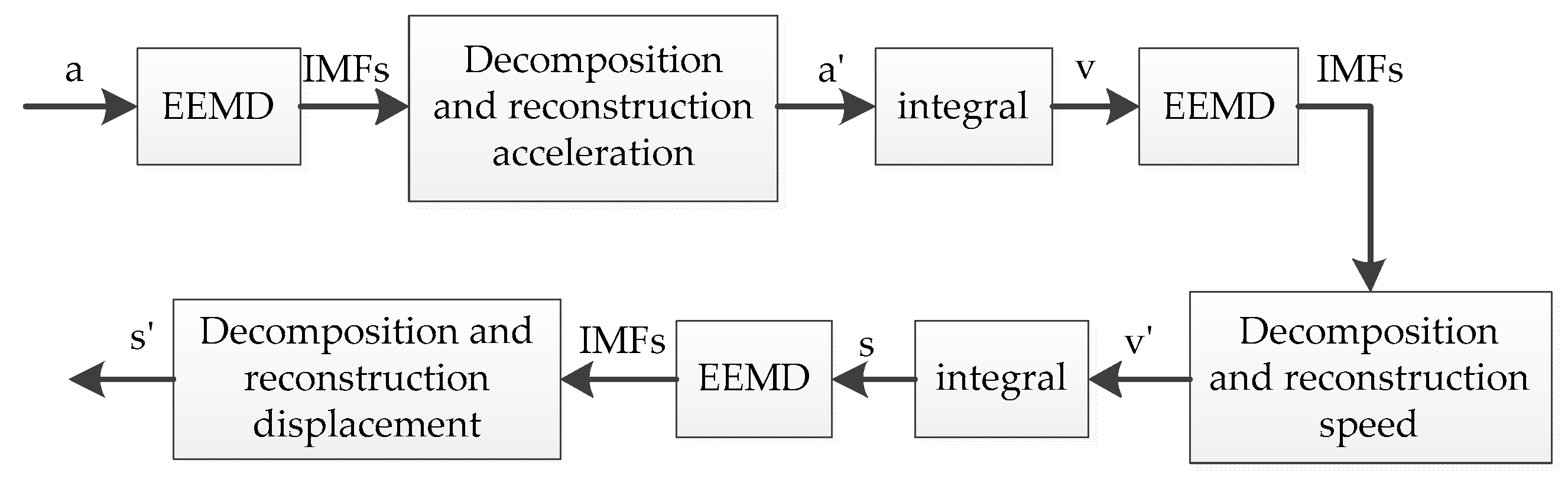
2.3. Displacement Reconstruction Algorithm
3. Experiment and Analysis
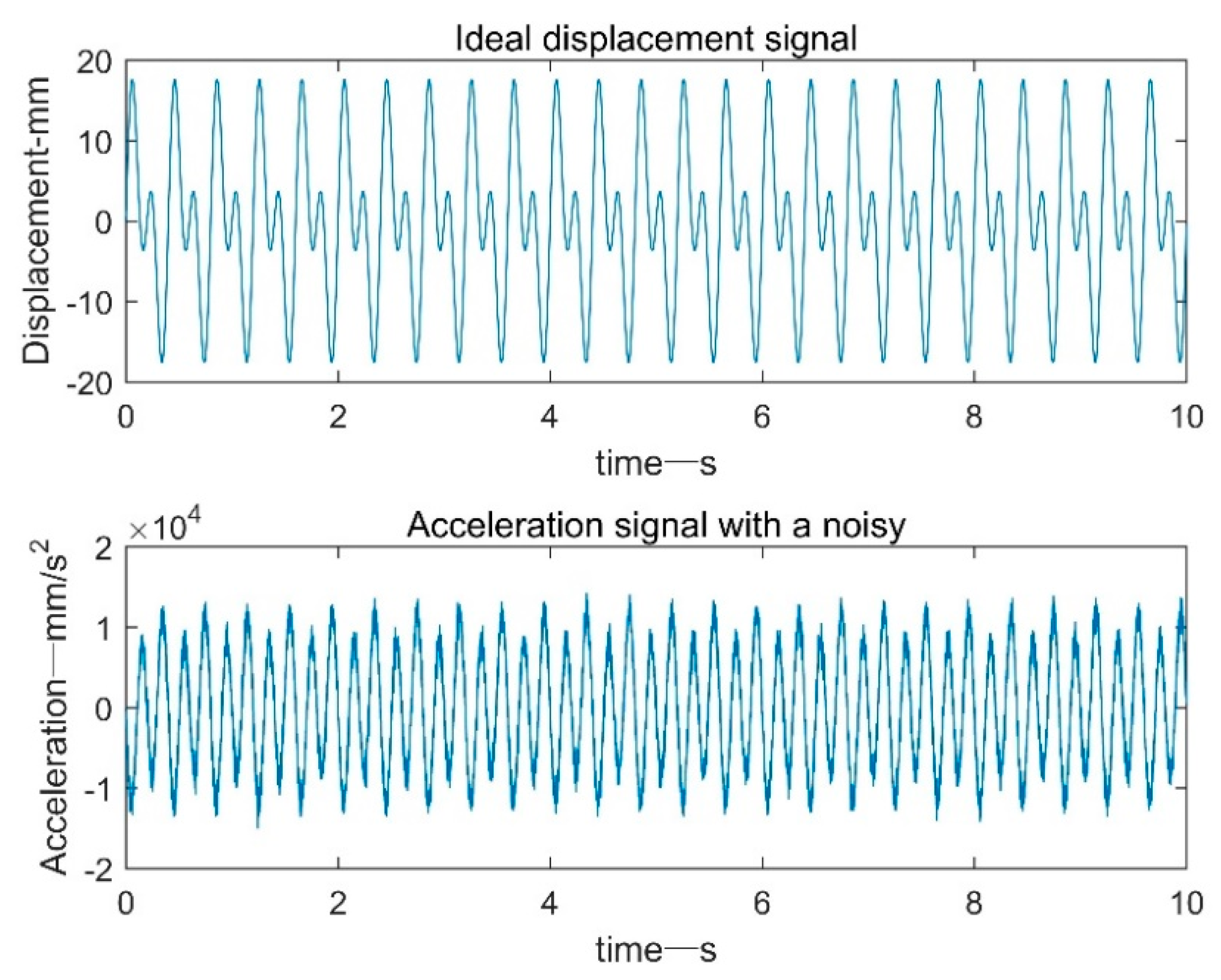
3.1. Bridge Analog Signal Simulation Experiment
3.1.1. Constructing Bridge Analog Signals
3.1.2. Frequency Domain Bandpass Filtering
3.1.3. Based on EMD Adaptive Filter Processing
3.1.4. Based on FFT+EMD Filtering
3.1.5. Based on EEMD Adaptive Filter Processing
3.1.6. Error Analysis of Integral Results
3.2. Vibration Table Data Acquisition Test
3.2.1. Data Acquisition and Algorithm Verification Test Based on Vibration Table
3.2.2. Displacement Reconstruction of Vibration Table
3.2.3. Error Analysis of Integral Results
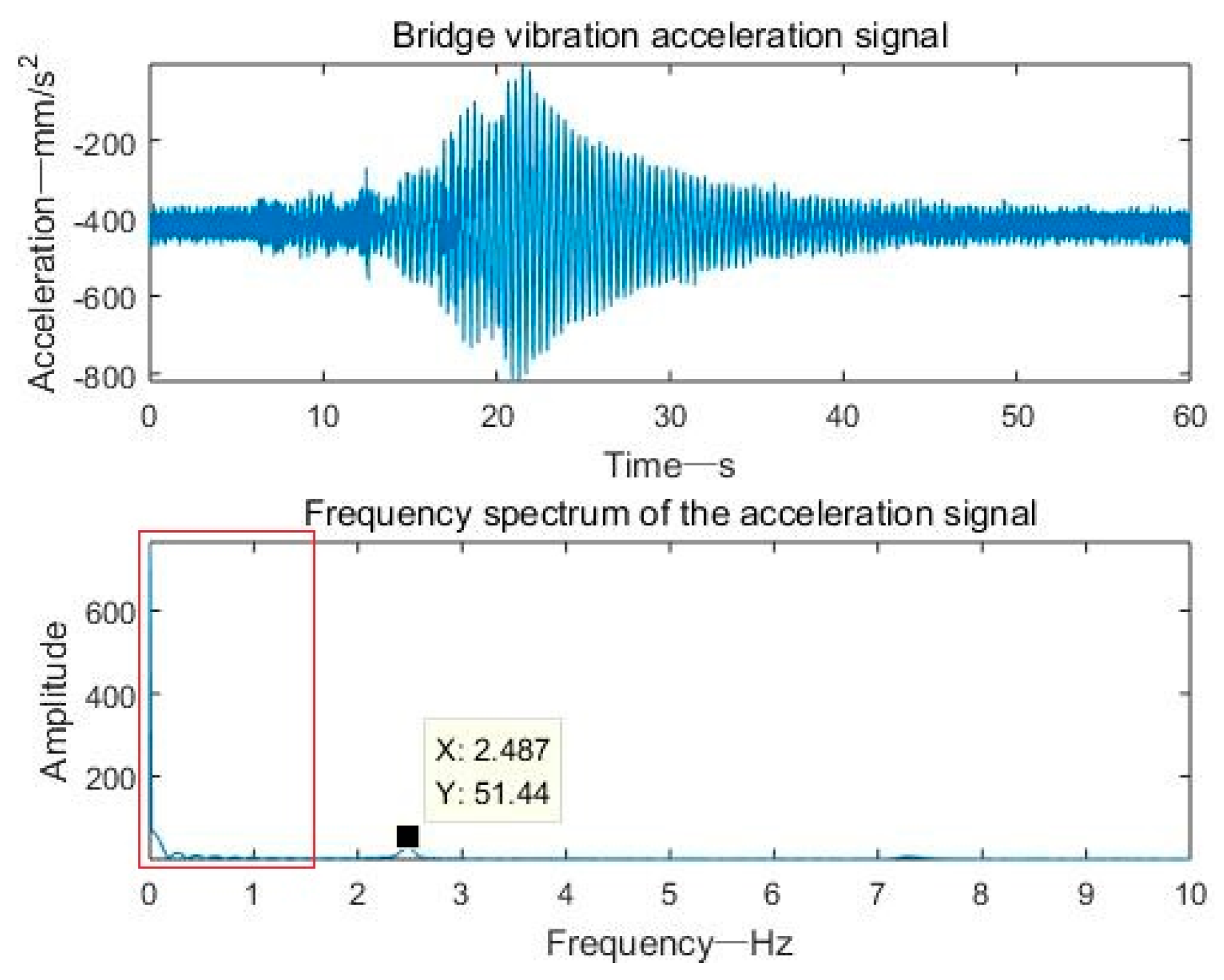
3.3. Bridge Field Data Acquisition Test
3.3.1. Data Acquisition and Algorithm Verification Test Based on Highway Elevated Bridge
3.3.2. Displacement Reconstruction of Viaduct
4. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Zhu, X.; Cao, M.; Ostachowicz, W.; Xu, W. Damage identification in bridges by processing dynamic responses to moving loads: Features and evaluation. Sensors 2019, 19, 463. [Google Scholar] [CrossRef] [PubMed]
- Yunus, M.Z.M.; Ibrahim, N.; Ahmad, F.S. A review on bridge dynamic displacement monitoring using global positioning system and accelerometer. In Proceedings of the International Conference on Engineering and Technology (InCET 2017), Putrajava, Malaysia, 23–24 November 2017. [Google Scholar] [CrossRef]
- Hidehiko, S.; Kentaro, K.; Chitoshi, M. Technique for determining bridge displacement response using MEMS Accelerometers. Sensors 2016, 16, 257. [Google Scholar] [CrossRef]
- Lin, W.; Lam, H.; Yoda, T.; Ge, H.; Xu, Y.; Kasano, H. After-fracture redundancy analysis of an aged truss bridge in Japan. Struct. Infrastruct. Eng. 2017, 13, 107–117. [Google Scholar] [CrossRef]
- Joshi, S.; Harle, S.M. Linear variable differential transducer (LVDT) & its applications in civil engineering. Int. J. Transp. Eng. Technol. 2017, 3, 62–66. [Google Scholar] [CrossRef]
- Malekjafarlan, A.; Martinez, D.; Obrien, E.J. The feasibility of using laser doppler vibrometer measurements from a passing vehicle for bridge damage detection. Shock Vibr. 2018, 2018, 1–10. [Google Scholar] [CrossRef]
- Feng, D.; Feng, M. Identification of structural stiffness and excitation forces in time domain using noncont-act vision-based displacement measurement. J. Sound Vib. 2017, 406, 15–28. [Google Scholar] [CrossRef]
- Feng, Z. Plane and vertical precision of GPS control survey in engineering survey. Constr. Des. Project 2017, 1, 111–113. [Google Scholar] [CrossRef]
- Kim, K.; Choi, J.; Chung, J.; Koo, G.; Bae, I.H.; Sohn, H. Structural displacement estimation through multi-rate fusion of accelerometer and RTK-GPS displacement and velocity measurements. Measurement 2018, 130, 223–235. [Google Scholar] [CrossRef]
- Hancke, G.; Silva, B.; Hancke, J.G. The role of advanced sensing in smart cities. Sensors 2013, 13, 393–425. [Google Scholar] [CrossRef] [PubMed]
- Guo, R.; Ye, S.; Ji, Y. Optimization acceleration integral method based on power spectrum estimation. In Proceedings of the 6th International Forum on Industrial Design, Luoyang, China, 2 July 2018. [Google Scholar] [CrossRef]
- Du, S.; Chen, P.; Chen, S.; Chen, S.; Zeng, C.H.; Chen, J.M. Research on performance comparison of high cost and low cost MEMS accelerometers. Transducer Microsys. Technol. 2018, 37, 48–50. [Google Scholar] [CrossRef]
- Majumder, S.; Mondal, T.; Deen, M. Wearable sensors for remote health monitoring. Sensors 2017, 17, 130. [Google Scholar] [CrossRef] [PubMed]
- Kandula, V.; DeBrunner, L.; DeBrunner, V.; Ranmbo, R. Field testing of indirect displacement estimation using accelerometers. In Proceedings of the 2012 Conference Record of the Forty Sixth Asilomar Conferen-ce on Signals, Pacific Grove, CA, USA, 4–7 November 2012. [Google Scholar] [CrossRef]
- Lin, N.; Li, D.S.; Li, H.N. Novel integration method of measured acceleration to velocity and displacement based on zero initial condition. Sci. Sin. Technol. 2016, 46, 602–614. [Google Scholar] [CrossRef] [Green Version]
- Do, T.M.; Le, T.C. Performance analysis of fft filter to measure displacement signal in road roughness profiler. Int. J. Comput. Electr. Eng. 2013, 5, 356. [Google Scholar] [CrossRef]
- Chen, Y.Q.; Zheng, W.; Wei, X.B. Application of EMD to integrated signal trend extraction. Adv. Mater. Res. 2012, 591–593, 2072–2076. [Google Scholar] [CrossRef]
- Shi, P.A.; Ye, J.W. Study on measured data processing method of model test for relative motions between two side-by-side replenishment ships in waves. Appl. Mech. Mater. 2012, 239–240, 1089–1094. [Google Scholar] [CrossRef]
- Jiang, W.L.; Lu, C.Q.; Zhu, Y. HHT and fuzzy C-means clustering-based fault recognition for axial piston pump. J Jilin Univ. (Eng. Technol. Ed.) 2015, 45, 429–436. [Google Scholar] [CrossRef]
- Chen, Y.G.; Zhong, Z.Y. Modal parameter identification of bridge structure based on improved EEMD algorithm. J. Highway Transp. Res. Dev. 2018, 35, 49–57. [Google Scholar] [CrossRef]
- Wu, Z.H.; Huang, N.E. Ensemble Empirical Mode Decomposi-tion: A noise-assisted data analysis method. Adv. Adapt. Data Anal. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, S.P. Hilbert-Huang Transform and Its Applications, 2nd ed.; National Defense Industry Press: Beijing, China, 2017; pp. 4–45. [Google Scholar]
- Yan, D.H.; Luo, Y.; Lu, N.W.; Yuan, M.; Beer, M. Fatigue stress spectra and reliability evaluation of short-to medium-span bridges under stochastic and dynamic traffic loads. J. Bridge Eng. 2017, 22, 04017102. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Function 1: Calculate the Dynamic Displacement of the Bridge | |
|---|---|
| Input: Acceleration SignalOutput: Displacement Signal | |
| 1: fordo | 15: if is an effective IMF then |
| 2: | 16: |
| 3: | 17: end if |
| 4: for do | 18: |
| 5: | 19: for do |
| 6: if is an effective IMF then | 20: |
| 7: | 21: |
| 8: end if | 22: for do |
| 9: | 23: |
| 10: for do | 24: if is an effective IMF then |
| 11: | 25: |
| 12: | 26: end if |
| 13: for do | 27: |
| 14: | |
| FFT Filtering | EMD Filtering | FFT+EMD Filtering | EEMD Filtering | |
|---|---|---|---|---|
| RMSe/% | 5.1636 | 4.3628 | 5.4405 | 1.4678 |
| Ke/% | 3.7788 | 29.3652 | 7.1083 | 0.1320 |
| Pe/° | 8.7845 | 23.5410 | 10.4951 | 1.9288 |
| FFT Filtering | EMD Filtering | FFT+EMD Filtering | EEMD Filtering | |
|---|---|---|---|---|
| RMS/% | 3.0499 | 267.7810 | 12.5467 | 0.4658 |
| Ke/% | 2.9030 | 28436 | 118.8451 | 0.1337 |
| Pe/° | 10.710 | 70.3518 | 22.1903 | 2.1368 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zou, Y.; Chen, Y.; Liu, P. Refactoring and Optimization of Bridge Dynamic Displacement Based on Ensemble Empirical Mode Decomposition. Sensors 2019, 19, 3125. https://doi.org/10.3390/s19143125
Zou Y, Chen Y, Liu P. Refactoring and Optimization of Bridge Dynamic Displacement Based on Ensemble Empirical Mode Decomposition. Sensors. 2019; 19(14):3125. https://doi.org/10.3390/s19143125
Chicago/Turabian StyleZou, Yingquan, Yunpeng Chen, and Peng Liu. 2019. "Refactoring and Optimization of Bridge Dynamic Displacement Based on Ensemble Empirical Mode Decomposition" Sensors 19, no. 14: 3125. https://doi.org/10.3390/s19143125
APA StyleZou, Y., Chen, Y., & Liu, P. (2019). Refactoring and Optimization of Bridge Dynamic Displacement Based on Ensemble Empirical Mode Decomposition. Sensors, 19(14), 3125. https://doi.org/10.3390/s19143125