Uncertainties in Model-Based Diesel Particulate Filter Diagnostics Using a Soot Sensor



Abstract
:1. Introduction
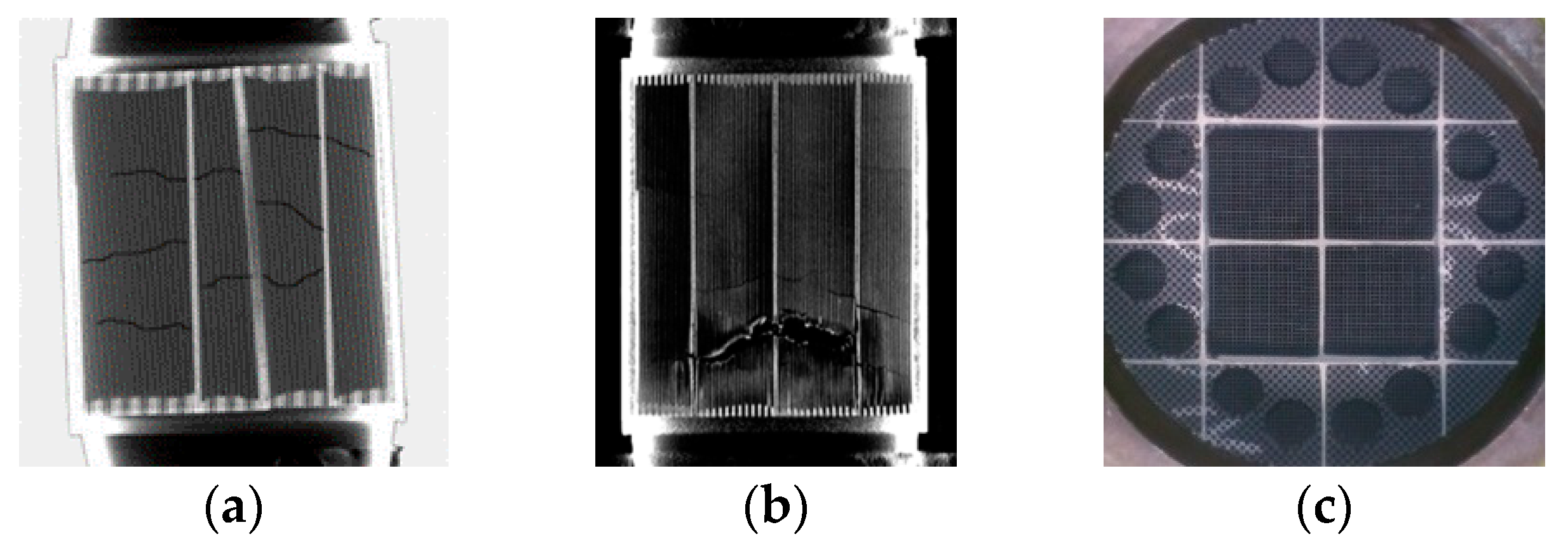
- Cracks in the substrate of the DPF: Ring-off cracks or internal cracks can occur due to thermal stresses on the substrate by uncontrolled regenerations or by drop to idle during DPF regeneration [12].
- Melting of the substrate: Although the melting point is safely high for silicon carbide (SiC) substrates (2800 °C), cordierite substrates are prone to melting in uncontrolled regenerations due to a lower melting point (1200 °C) [13].
- Unplugged DPF or total removal: A damaged DPF, the high pressure-drop due to ash accumulation, the fuel penalty of active regeneration and engine tuning reasons, can lead vehicle owners to remove or destroy the DPF (DPF tampering) instead of replacing it [14].
- Radio-frequency (RF): The accumulated soot in a DPF absorbs and changes the microwave signal produced by an RF antenna. A correlation of the signal change with the soot accumulation is possible [21].
- Electrical charge-based sensors: Diffusion charger (DC) technology, which relies on measuring the corona induced charge of particles [22,23] and electrostatic sensors which measure the amplified natural charge of the particles [24], are considered the most suitable electrical charge-based sensors for DPF diagnosis.
- Optical sensors: Optical sensors are based on the result of the interaction between the exhaust particles with a laser beam. Despite the domination of optical devices for laboratory and (Portable Emissions Measurement System (PEMS) applications, the maturity level of sensors for OBD applications is considered low. Laser induced incandescence (LII) sensors [25,26] are promising solutions for future advanced sensors.
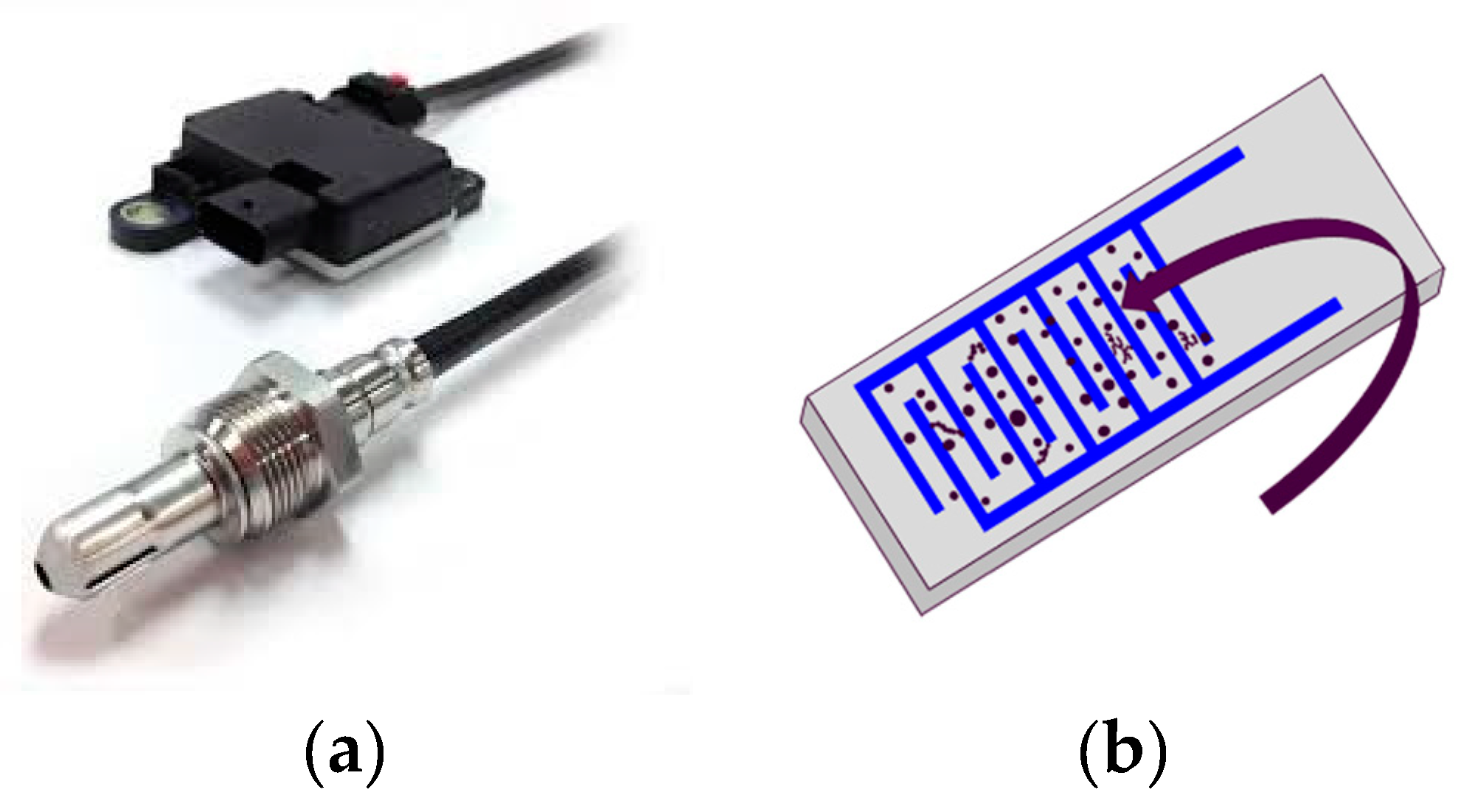
- Resistive sensors: The high conductivity of soot particles accumulated in dendritic geometry between two electrodes reduces the resistance of the system [27]. Below a specific value of the resistance the accumulation mode is over, and the regeneration mode of the sensor is activated to clean the soot deposits, increasing the value of resistance to infinite. The critical measurable quantity of a soot sensor is the duration of the sensor’s accumulation event, which is called the response time. This signal can be correlated with the soot emissions based on a statistical model or a physical model [28].
2. Materials and Methods
2.1. Engine and Exhaust Aftertreatment
- “OTL DPF”: PM emissions on cold NEDC at the OBD threshold limit (OTL) = 12 mg/km
- “Threshold DPF”: PM emissions on cold NEDC = 9.7 mg/km
- “TA DPF”: PM emissions on cold NEDC at the type approval (TA) limit = 4.5 mg/km
2.2. Driving Cycles
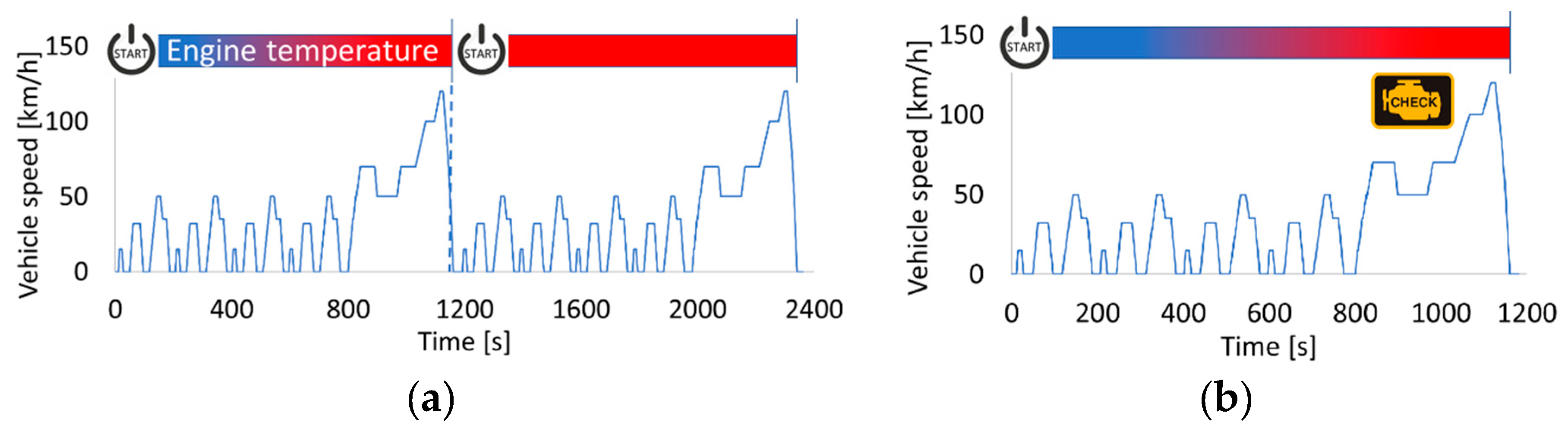
- The first part consists of a preconditioning period which for the EU is two consecutive NEDCs (or Worldwide harmonized Light-duty Test Cycles (WLTCs)) and for the US two Federal Test Procedures (FTP-75), Supplemental Emissions Tests (SETs) or Unified Cycles (an additional preconditioning cycle is possible upon request).
- The second part is the exhaust emission test. This is a cold cycle, and at least six hours of soaking are needed before its start. Prior to the end of the emission tests cycle (or before the engine stop for the FTP-75 cycle), a vehicle set with the criteria limits for the DPF diagnosis must diagnose the malfunction and illuminate the MIL (Figure 3 and Figure 4).
2.3. Resistive Soot Sensor
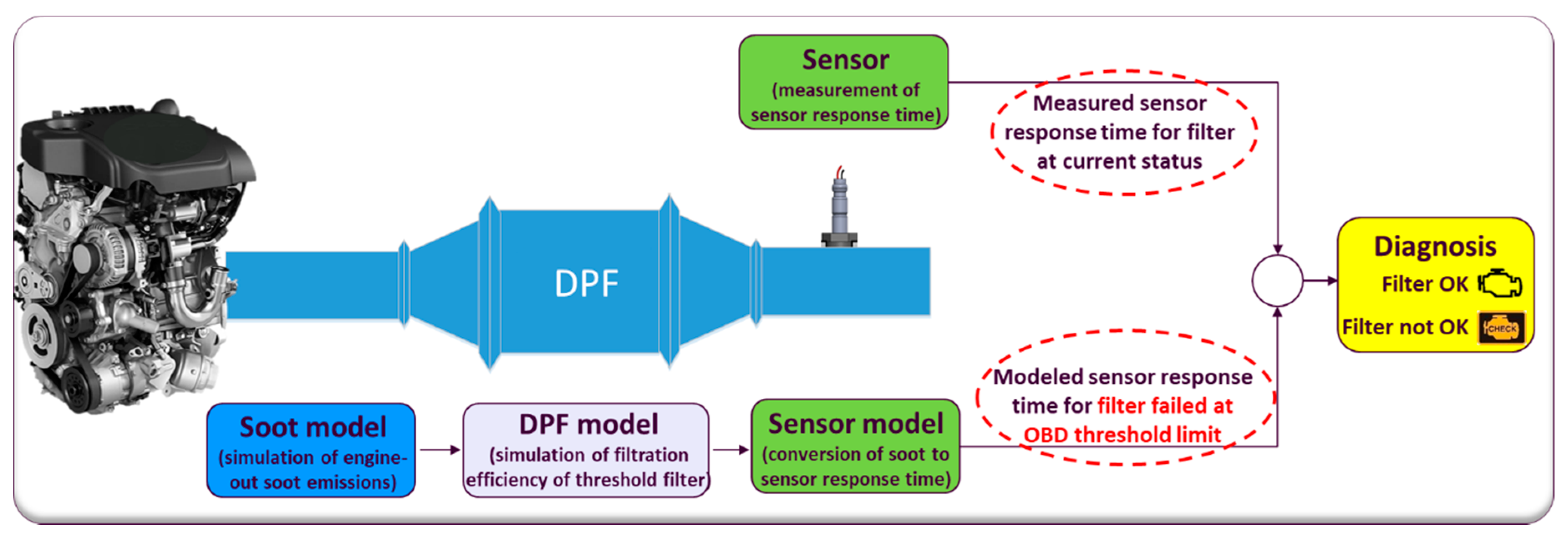
2.4. OBD Model and Calibration of the Threshold Limit
- Higher measured response time means lower than the OTL emissions (DPF OK)
- Lower measured response time indicates higher than the OTL emissions (DPF not OK)
2.4.1. Soot Model
- : engine speed;
- : injected fuel mass;
- : corrected soot concentration at a specific operating point during transient operation;
- : soot concentration from base emission map (steady-state);
- : soot concentration from transient correction;
- k: influencing parameters for transient correction;
- : partial derivative of soot concentration against each influencing parameter;
- : value of the influencing parameter at a specific operating point during transient operation;
- : value of the influencing parameter at a specific operating point during steady-state operation.
2.4.2. DPF Model
- Soot and substrate parameters
- Soot compressibility model parameters
- Filtration parameters
2.4.3. Sensor Model
2.4.4. OBD Algorithms
- ≥12 mg/km → OBD index ≤ 1 → DPF not OK
- <12 mg/km → OBD index > 1 → DPF OK
- Measure the sensor response times for the OTL and TA DPFs on different legislative driving cycles on the test bench. For the final calibration of a series production vehicle, additional on-road measurements must also be used.
- Calculate the OBD Indexes for all sensor accumulations using the filtration efficiency for 12 mg/km over NEDC initially.
- Calculate the threshold index, which allows minimum errors of type I and II (Figure 11). According to the needs of each calibration campaign, the threshold can be moved towards the direction of zeroing either the type I or type II error. In most cases, the priority is to ensure zero type II errors (legislation need), and thus, the index threshold is moved towards lower values.
- Calibrate the threshold filtration efficiency, which brings the threshold OBD index to 1. This step is not necessary for the case of the constant filtration efficiency but can improve the accuracy of the filtration profile from the Axisuite or similar second-by-second models. Based on this threshold filtration efficiency, the threshold emissions on NEDC can also be calculated as a final reference value.
2.5. Error Propagation Analysis
3. Results and Discussion
3.1. Error Associated with the Soot Model
3.2. Error Associated with the DPF Model
3.3. Error Associated with the Sensor Model
3.4. Error Associated with the Operation of the Resistive Soot Sensor
3.5. Overall OBD Model
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- World Health Organization WHO. Air Quality Guidelines for Particulate Matter, Ozone, Nitrogen Dioxide and Sulfur Dioxide: Global Update 2005; World Health Organisation: Genebra, Switzerland, 2006. [Google Scholar]
- European Environment Agency. Air Pollution Harms Human Health and the Environment; European Environment Agency: Copenhagen, Denmark, 2019. [Google Scholar]
- Lelieveld, J.; Evans, J.S.; Fnais, M.; Giannadaki, D.; Pozzer, A. The contribution of outdoor air pollution sources to premature mortality on a global scale. Nature 2015, 525, 367–371. [Google Scholar] [CrossRef] [PubMed]
- Stohl, A.; Aamaas, B.; Amann, M.; Baker, L.H.; Bellouin, N.; Berntsen, T.K.; Boucher, O.; Cherian, R.; Collins, W.; Daskalakis, N.; et al. Evaluating the climate and air quality impacts of short-lived pollutants. Atmos. Chem. Phys. Discuss. 2015, 15, 10529–10566. [Google Scholar] [CrossRef] [Green Version]
- Muñoz, X.; Barreiro, E.; Bustamante, V.; Lopez-Campos, J.; González-Barcala, F.; Cruz, M. Diesel exhausts particles: Their role in increasing the incidence of asthma. Reviewing the evidence of a causal link. Sci. Total. Environ. 2019, 652, 1129–1138. [Google Scholar] [CrossRef] [PubMed]
- Uherek, E.; Halenka, T.; Borken-Kleefeld, J.; Balkanski, Y.; Berntsen, T.; Borrego, C.; Gauss, M.; Hoor, P.; Juda-Rezler, K.; Lelieveld, J. Transport impacts on atmosphere and climate: Land transport. Atmos. Environ. 2010, 44, 4772–4816. [Google Scholar] [CrossRef]
- European Commission. Communication from the Commission to the European Parliament, the Council, the European Economic and Social Committee and the Committee of the Regions: A Europe that Protects: Clean Air for All; European Commission: Brussels, Belgium, 2018. [Google Scholar]
- Barclays Official California Code of Regulations. § 1968.2. Malfunction and Diagnostic System Requirements for 2004 and Subsequent Model-Year Passenger Cars, Light-Duty Trucks, and Medium-Duty Vehicles and Engines (OBD II). Available online: https://govt.westlaw.com/calregs/Document/IBDFC18179E764C58A4E91F0BB6CCA0D9?viewType=FullText&listSource=Search&originationContext=Search+Result&transitionType=SearchItem&contextData=(sc.Search)&navigationPath=Search%2fv1%2fresults%2fnavigation%2fi0ad62d2e0000016bfb85703a1b3d4dc9%3fNav%3dREGULATION_PUBLICVIEW%26fragmentIdentifier%3dIBDFC18179E764C58A4E91F0BB6CCA0D9%26startIndex%3d1%26transitionType%3dSearchItem%26contextData%3d%2528sc.Default%2529%26originationContext%3dSearch%2520Result&list=REGULATION_PUBLICVIEW&rank=1&t_T2=1968.2&t_S1=CA+ADC+s#co_term_137612 (accessed on 28 May 2019).
- UNECE. Addendum 82: Regulation No. 83 (R083r5). Available online: https://www.unece.org/?id=39145 (accessed on 28 May 2019).
- European Commission. Regulation (EU) 2017/1151. Off. J. Eur. Union 2017, 7, 1–643. [Google Scholar]
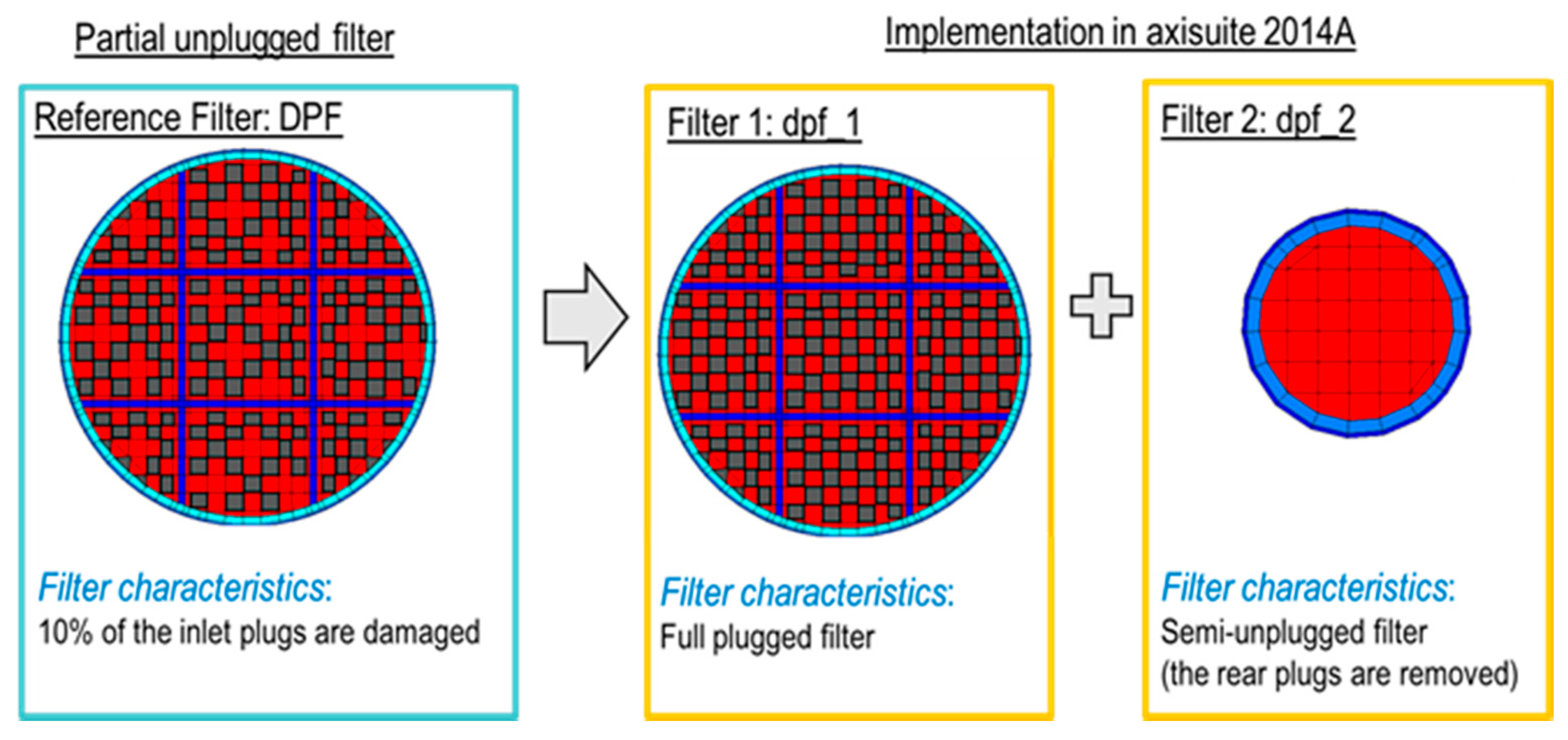
- Haralampous, O.; Dritselis, C. Modeling of the loading in partially damaged DPFs. In Proceedings of the MODEGAT IV, Bad Herrenalb/Karlsruhe, Germany, 13–15 September 2015. [Google Scholar]
- Merkel, G.A.; Cutler, W.A.; Warren, C.J. Thermal Durability of Wall-Flow Ceramic Diesel Particulate Filters. SAE Tech. Pap. Ser. 2001. [Google Scholar] [CrossRef]
- DieselNet. Filter Regeneration. Available online: https://www.dieselnet.com/tech/dpf_regen.php (accessed on 28 May 2019).
- European Commission. Framework Contract for Studies and Technical Assistance in the Field of Emissions; European Commission: Brussels, Belgium; Luxembourg City, Luxembourg, 2018. [Google Scholar]
- DieselNet. Soot (PM) Sensors. Available online: https://www.dieselnet.com/tech/sensors_soot.php (accessed on 28 May 2019).
- Samaras, Z.; Geivanidis, S.; Vermeulen, R.; Vonk, W.; Noble, A.; Andersson, J.; Sindano, H. Technical Feasibility of Different Regulatory OBD Threshold Limits (OTL) for Euro 6 (LD) Vehicles. TNO Report. 2014. Available online: http://publications.europa.eu/resource/cellar/e8b49169-3639-4ec3-a208-79e1ab965c79.0001.01/DOC_1 (accessed on 28 May 2019). [CrossRef]
- Feulner, M.; Hagen, G.; Hottner, K.; Redel, S.; Müller, A.; Moos, R. Comparative Study of Different Methods for Soot Sensing and Filter Monitoring in Diesel Exhausts. Sensors 2017, 17, 400. [Google Scholar] [CrossRef] [PubMed]
- Kamimoto, T. A review of soot sensors considered for on-board diagnostics application. Int. J. Engine Res. 2017, 18, 631–664. [Google Scholar] [CrossRef]
- Khalek, I.A. Exhaust Sensor Program for Emission Monitoring and Compliance in the USA & Particle Calibration Laboratory. In Proceedings of the MoVE2019, Chengdu, China, 16–18 January 2019. [Google Scholar]
- Kontses, D.; Geivanidis, S.; Samaras, Z. Review of Legislative Requirements and Methods for the Estimation of PN/PM Emissions for Advanced Light-duty OBD Applications. In Proceedings of the 23rd Transport and Air Pollution Conference, Thessaloniki, Greece, 15–17 May 2019. [Google Scholar]
- Sappok, A.; Bromberg, L.; Parks, J.E.; Prikhodko, V. Loading and Regeneration Analysis of a Diesel Particulate Filter with a Radio Frequency-Based Sensor. SAE Int. 2010. [Google Scholar] [CrossRef]
- Ntziachristos, L.; Fragkiadoulakis, P.; Samaras, Z.; Janka, K.; Tikkanen, J. Exhaust Particle Sensor for OBD Application. SAE Tech. Pap. Ser. 2011. [Google Scholar] [CrossRef]
- Rostedt, A.; Ntziachristos, L.D.; Simonen, P.; Rönkkö, T.; Samaras, Z.C.; Hillamo, R.; Janka, K.; Keskinen, J. A New Miniaturized Sensor for Ultra-Fast On-Board Soot Concentration Measurements. SAE Int. J. Engines 2017, 10, 1859–1865. [Google Scholar] [CrossRef]
- Allmendinger, K.; Henderson, B.; Steppan, J.; Lourdhusamy, A.; Wang, V.; Fitzpatrick, J.; Maricq, M.; Kubinski, D. Comparison of Experimental and First Principles Modeling Results for the PMTrac ® Electrostatic Soot Sensor. In Proceedings of the In UC Riverside Particulate Matter Portable Emissions Measurement Systems Conference & Workshop, Riverside, CA, USA, 11–12 April 2013. [Google Scholar]
- Zhang, Z.; Del Re, L.; Fuerhapter, R. Fast Hybrid Sensor for Soot of Production CI Engines. SAE Tech. Pap. Ser. 2017. [Google Scholar] [CrossRef]
- Kupper, M.; Pulko, J.; Kraft, M.; Bergmann, A. First Steps towards a Super-Compact In-Situ Laser-Induced-Incandescence Sensor System. Proceedings 2019, 2, 1017. [Google Scholar] [CrossRef]
- Grondin, D.; Westermann, A.; Breuil, P.; Viricelle, J.; Vernoux, P. Influence of key parameters on the response of a resistive soot sensor. Sens. Actuators B Chem. 2016, 236, 1036–1043. [Google Scholar] [CrossRef]
- Fragkiadoulakis, P.; Geivanidis, S.; Samaras, Z. Modeling a resistive soot sensor by particle deposition mechanisms. J. Aerosol Sci. 2018, 123, 76–90. [Google Scholar] [CrossRef]
- Khalek, I.; Premnath, V. Particle Sensor Performance & Durability for OBD Applications & Beyond. In Proceedings of the CE-CERT Workshop, Riverside, CA, USA, 11 April 2013. [Google Scholar]
- Kondo, A.; Yokoi, S.; Sakurai, T.; Nishikawa, S.; Egami, T.; Tokuda, M.; Sakuma, T. New Particulate Matter Sensor for On Board Diagnosis. SAE Int. J. Engines 2011, 4, 117–125. [Google Scholar] [CrossRef] [Green Version]
- Ochs, T.; Schittenhelm, H.; Genssle, A.; Kamp, B. Particulate Matter Sensor for On Board Diagnostics (OBD) of Diesel Particulate Filters (DPF). SAE Int. J. Fuels Lubr. 2010, 3, 61–69. [Google Scholar] [CrossRef]
- Husted, H.; Roth, G.; Nelson, S.; Hocken, L.; Fulks, G.; Racine, D. Sensing of Particulate Matter for On-Board Diagnosis of Particulate Filters. SAE Int. J. Engines 2012, 5, 235–247. [Google Scholar] [CrossRef]
- Spetz, A.L.; Huotari, J.; Bur, C.; Bjorklund, R.; Lappalainen, J.; Jantunen, H.; Schütze, A.; Andersson, M. Chemical sensor systems for emission control from combustions. Sens. Actuators B Chem. 2013, 187, 184–190. [Google Scholar] [CrossRef] [Green Version]
- Grob, B.; Schmid, J.; Ivleva, N.P.; Niessner, R. Conductivity for Soot Sensing: Possibilities and Limitations. Anal. Chem. 2012, 84, 3586–3592. [Google Scholar] [CrossRef]
- Brunel, O.; Duault, F.; Lavy, J.; Creff, Y.; Youssef, B. Smart Soot Sensor for Particulate Filter OBD. SAE Int. J. Passeng. Cars Electron. Electr. Syst. 2013, 6, 307–327. [Google Scholar] [CrossRef]
- Linke, J.; Konrad, D.; Gmbh, B.E. Concept for Diesel Particulate Filter monitoring based on BOSCH Particulate Matter Sensor (PMS). In Proceedings of the Internationales Stuttgarter Symposium, Stuttgart, Germany, 15–16 March 2016. [Google Scholar] [CrossRef]
- Neumann, E.; Eckardt, D.; Stölting, E.; Gratzke, R. Efficient soot raw emission modelling for Diesel engine control units. In Proceedings of the 9th Symposium Automotive Powertrain Control Systems, Berlin, Germany, 20 September 2012. [Google Scholar]
- Karamitros, D. Operation of Diesel Particulate Filters with Simultaneous Selective Catalytic Reduction of NOx Dimitrios Karamitros. PhD Thesis, Aristotle University of Thessaloniki, Thessaloniki, Greece, 2016. [Google Scholar]
- Hidria Glow Plug Pressure Sensors. Available online: https://www.hidria.com/int/en/products-and-solutions/automotive-technologies/ogrevalne-svecke-s-senzorjem-tlaka-en/ (accessed on 28 May 2019).
- Haralampous, O.; Kontzias, T. Approximate pressure drop and filtration efficiency expressions for semi-open wall-flow channels. Can. J. Chem. Eng. 2014, 92, 1517–1525. [Google Scholar] [CrossRef]
- Haralampous, O.; Payne, S. Experimental testing and mathematical modelling of diesel particle collection in flow-through monoliths. Int. J. Engine Res. 2016, 17, 1045–1061. [Google Scholar] [CrossRef]
- AVL. Avl Micro Soot Sensor. Available online: https://www.avl.com/vehicle-system-hybrid4/-/asset_publisher/gYjUpY19vEA8/content/mssplus-avl-micro-soot-sensor?_com_liferay_asset_publisher_web_portlet_AssetPublisherPortlet_INSTANCE_gYjUpY19vEA8_redirect=https%3A%2F%2Fwww.avl.com%3A443%2Fvehicle-system-hybrid4%3Fp_p_id%3Dcom_liferay_asset_publisher_web_portlet_AssetPublisherPortlet_INSTANCE_gYjUpY19vEA8%26p_p_lifecycle%3D0%26p_p_state%3Dnormal%26p_p_mode%3Dview%26_com_liferay_asset_publisher_web_portlet_AssetPublisherPortlet_INSTANCE_gYjUpY19vEA8_cur%3D0%26p_r_p_resetCur%3Dfalse%26_com_liferay_asset_publisher_web_portlet_AssetPublisherPortlet_INSTANCE_gYjUpY19vEA8_assetEntryId%3D933720 (accessed on 28 May 2019).
- Autosar. Specification of Diagnostic Event Manager, V5.2.0, R4.1 Rev 3. Available online: https://www.autosar.org/fileadmin/user_upload/standards/classic/4-1/AUTOSAR_SWS_DiagnosticEventManager.pdf (accessed on 28 May 2019).

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| September 2015 | September 2018 | |
|---|---|---|
| Emission limits | Euro 6a, b, NEDC | Euro 6c, d, WLTC |
| Particulate mass | 4.5 mg/km | 4.5 mg/km |
| Particle number | 6 × 1011 #km a | 6 × 1011 #/km |
| OBD limits | OBD Euro 6–1 | OBD Euro 6–2 |
| Particulate mass | 25 mg/km | 12 mg/km b |
| Particle number | No limit | No limit |
| Filter removal | DPF only | DPF only |
| Feature | Value |
|---|---|
| Engine | Toyota 1.4 L |
| Fuel | Diesel |
| Displacement [cc] | 1364 |
| Fuel injection system | Common Rail, Direct Injection (DI) |
| Max Power [kW/rpm] | 66/3800 |
| Max Torque [Nm/rpm] | 205/1400–2800 |
| Cylinders | 4 |
| Gearbox | None |
| Emission standards | Euro 6b |
| Engine Speed [rpm] | Engine Torque [Nm] |
|---|---|
| 800 | 0 |
| 1200 | 10 |
| 1600 | 20 |
| 2000 | 60 |
| 2400 | 100 |
| 2800 | 140 |
| 3200 | 180 |
| 3600 |
| Variables | Source of Inaccuracy | Associated Error |
|---|---|---|
| Base soot model | Emission maps on transient operation | δsv = 25% |
| Soot model with transient correction | δsv = 2% |
| Variables | Source of Inaccuracy | Associated Error |
|---|---|---|
| DPF model: constant Filtration efficiency | Constant filtration efficiency | δcf = 9% |
| DPF model: Axisuite filtration efficiency | Axisuite model | δaf = 5% |
| Variables | Source of Inaccuracy | Associated Error |
|---|---|---|
| Exhaust soot concentration [mg/m3] | AVL 483 Micro Soot Sensor | δs = 5 μg/m3 |
| Exhaust temperature [°C] | Thermocouple Type K | δc = 3.4 °C |
| Exhaust gas velocity [m/s] | Engine intake hot wire and ECU calculated value | δv = 0.23% |
| Intake mass flow [kg/h] | Engine intake hot wire | δm = 2% |
| Fuel injection mass [kg/h] | ECU calculated value | δj = 2% |
| Exhaust Pressure [Pa] | Pressure sensor | δp = 300 Pa |
| Sensor model | Empirical function | δsm = 7% |
| Soot [mg/m3] | Velocity [m/s] | Temperature [°C] |
|---|---|---|
| 1.5 | 12 | 180 |
| 4 | 24 | 240 |
| 14 | 38 |
| Variables | Source of Inaccuracy | Associated Error |
|---|---|---|
| Soot model | Transient operation | δem = 25% |
| DPF model | Constant f.e. | δdm = 9% |
| Sensor model | Inputs of empirical function | δsm = 7% |
| Soot sensor accuracy | Sensor operation | δs = 18% |
| Overall OBD model | Sub-models and sensor | δOBD = 28% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kontses, D.; Geivanidis, S.; Fragkiadoulakis, P.; Samaras, Z. Uncertainties in Model-Based Diesel Particulate Filter Diagnostics Using a Soot Sensor. Sensors 2019, 19, 3141. https://doi.org/10.3390/s19143141
Kontses D, Geivanidis S, Fragkiadoulakis P, Samaras Z. Uncertainties in Model-Based Diesel Particulate Filter Diagnostics Using a Soot Sensor. Sensors. 2019; 19(14):3141. https://doi.org/10.3390/s19143141
Chicago/Turabian StyleKontses, Dimitrios, Savas Geivanidis, Pavlos Fragkiadoulakis, and Zissis Samaras. 2019. "Uncertainties in Model-Based Diesel Particulate Filter Diagnostics Using a Soot Sensor" Sensors 19, no. 14: 3141. https://doi.org/10.3390/s19143141
APA StyleKontses, D., Geivanidis, S., Fragkiadoulakis, P., & Samaras, Z. (2019). Uncertainties in Model-Based Diesel Particulate Filter Diagnostics Using a Soot Sensor. Sensors, 19(14), 3141. https://doi.org/10.3390/s19143141