Vision-Based Measurement of Heart Rate from Ballistocardiographic Head Movements Using Unsupervised Clustering




Abstract
:1. Introduction
2. Proposed Method
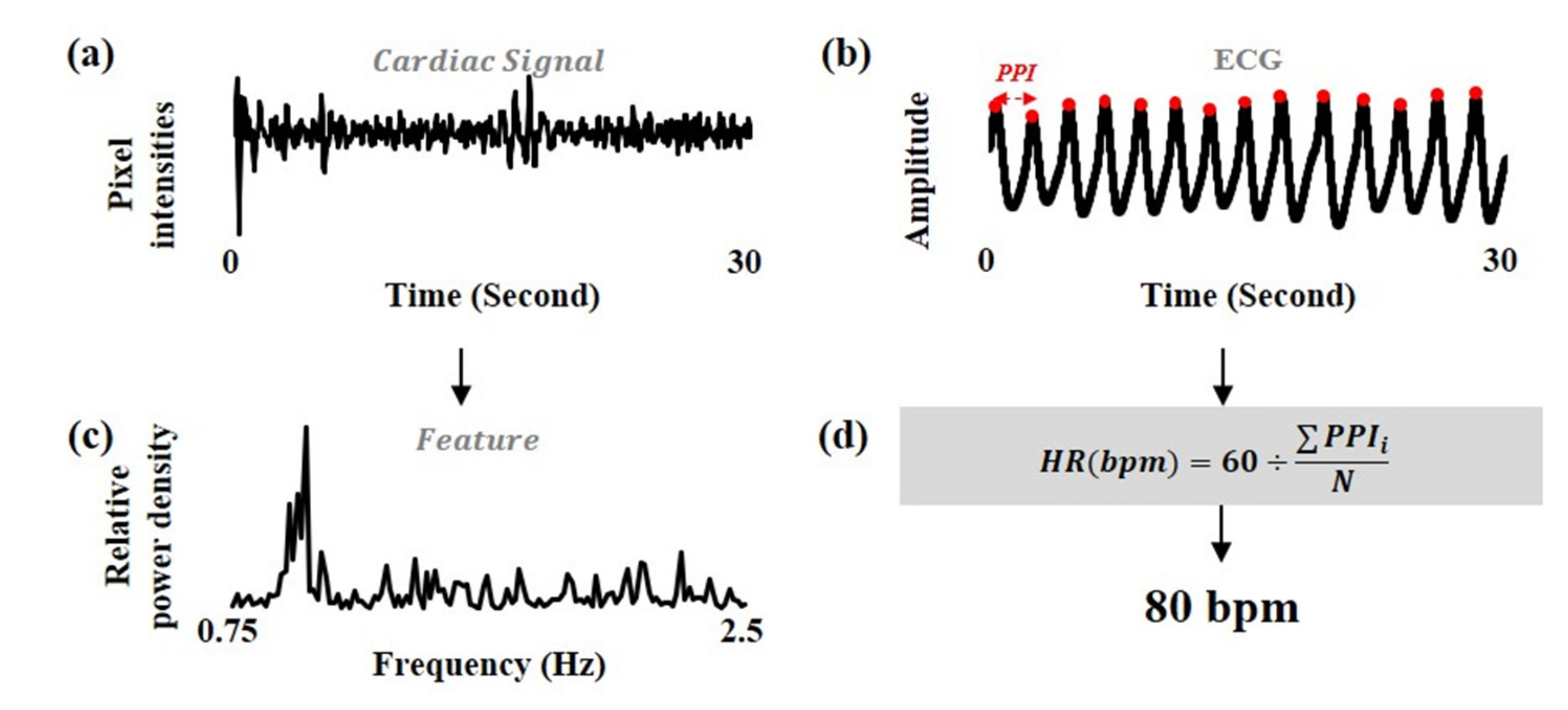
2.1. Signal Extraction and Signal Estimation
2.2. Feature Extraction
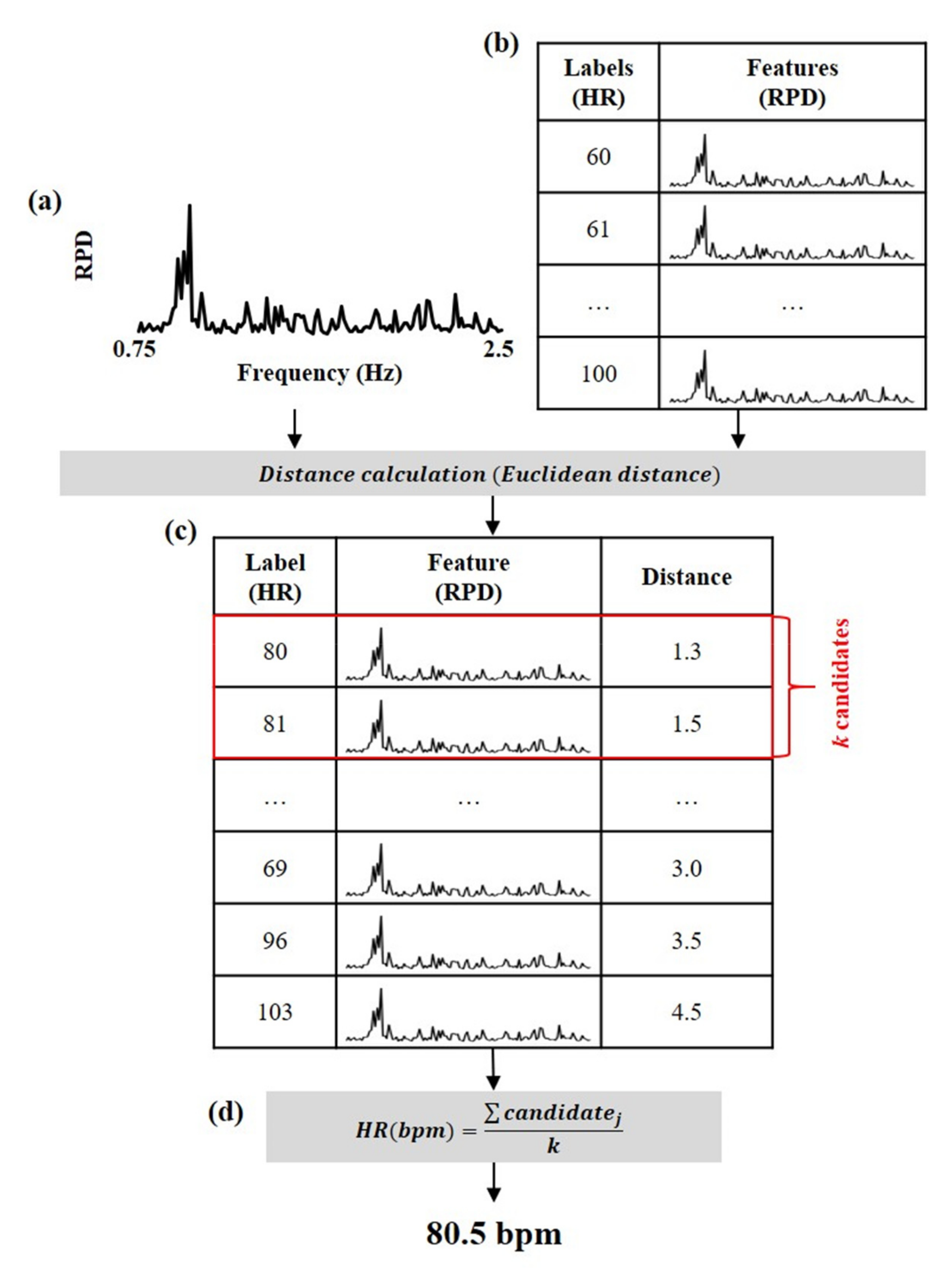
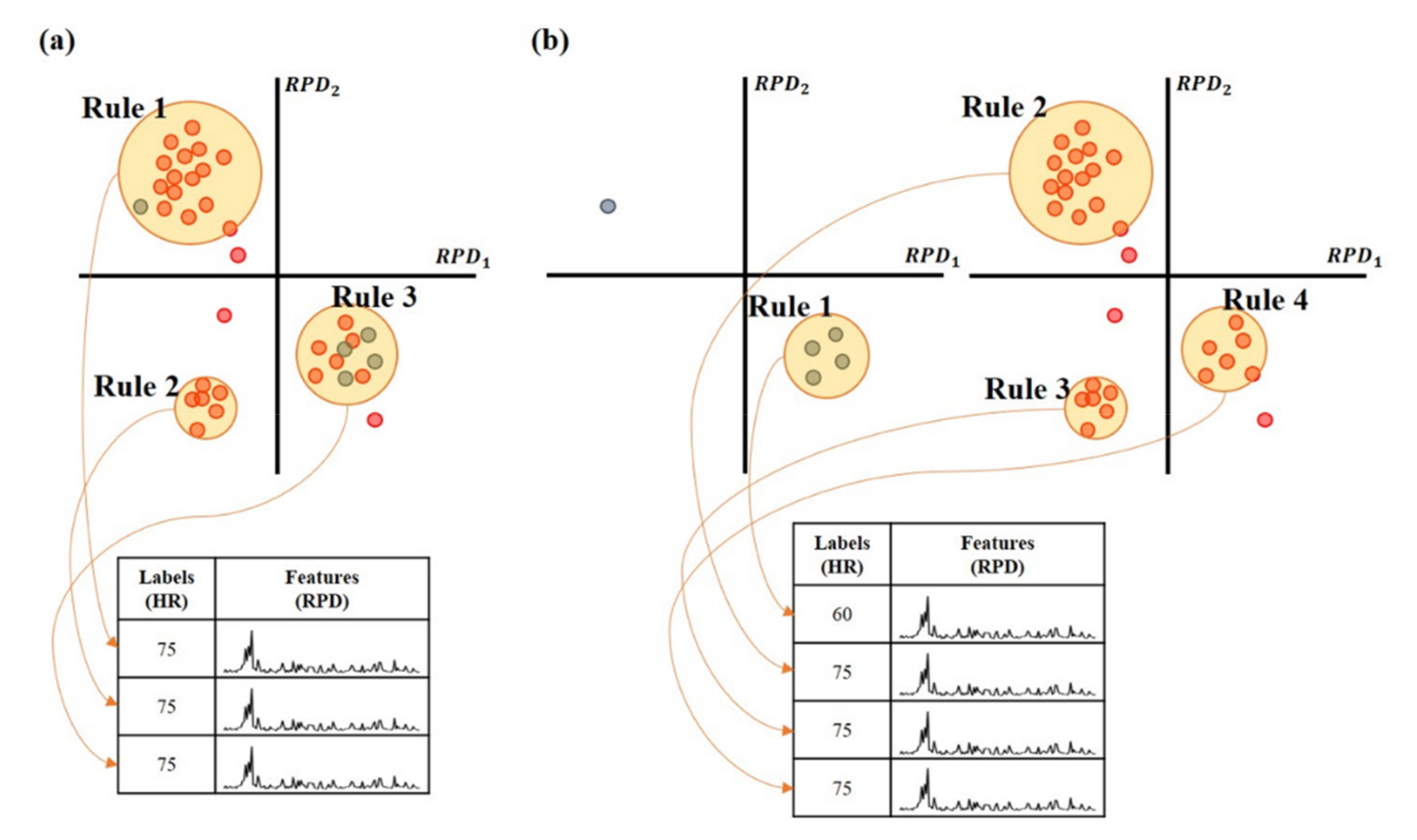
2.3. Unsupervised Clustering
2.4. Heart Rate Estimation
3. Experiments
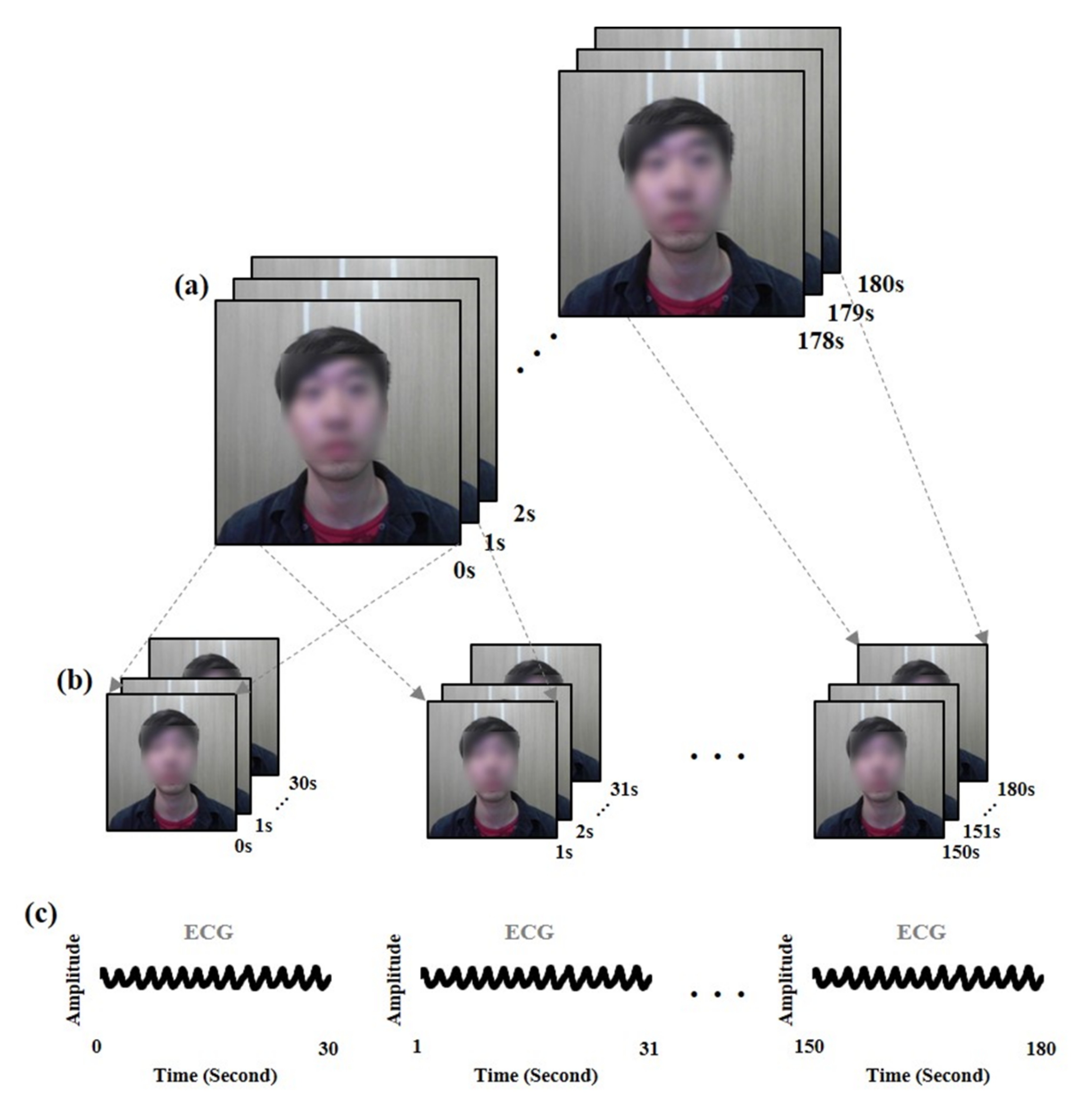
3.1. Dataset
3.2. Evaluation
4. Results
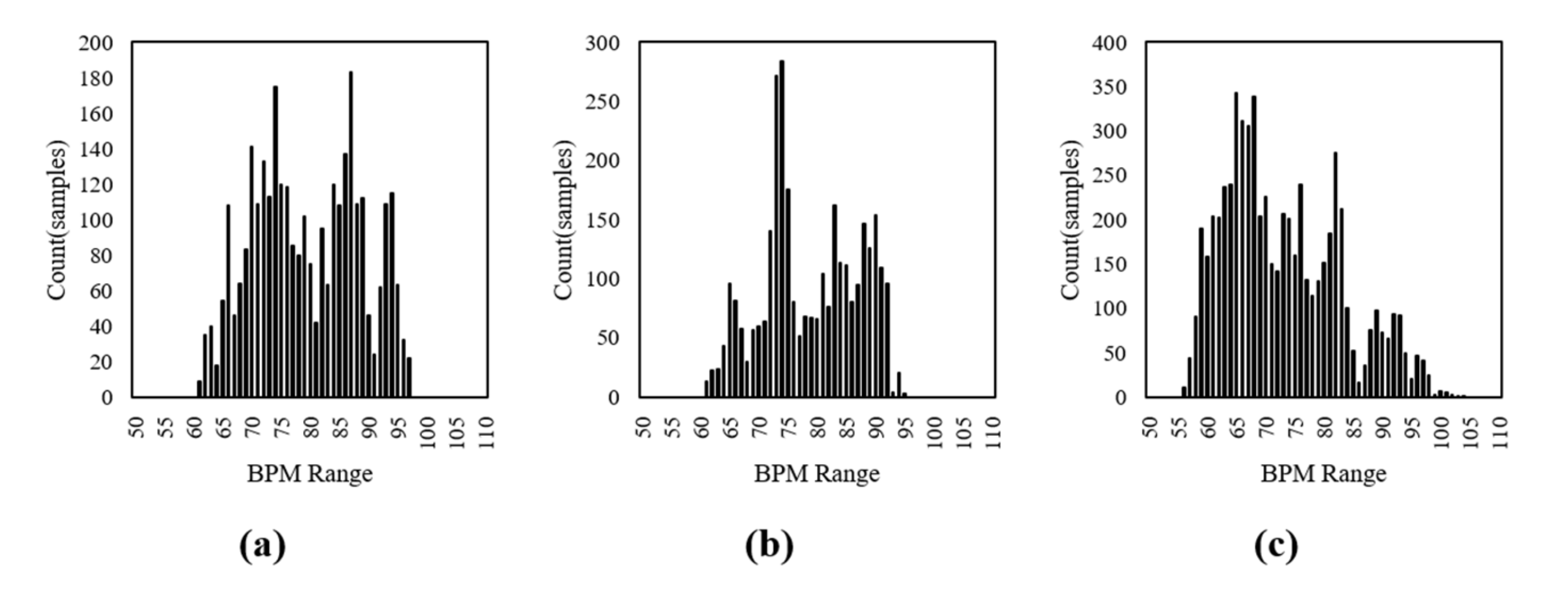
4.1. Experiment 1: Normal
4.2. Experiment 2: Facial Expressions
4.3. Experiment 3: Facial Expressions and Voluntary Head Motions
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Hertzman, A.B.; Dillon, J.B. Applications of photoelectric plethysmography in peripheral vascular disease. Am. Heart J. 1940, 20, 750–761. [Google Scholar] [CrossRef]
- Hassan, M.; Malik, A.; Fofi, D.; Saad, N.; Karasfi, B.; Ali, Y.; Meriaudeau, F. Heart rate estimation using facial video: A review. Biomed. Signal Process. Control 2017, 38, 346–360. [Google Scholar] [CrossRef]
- Poh, M.Z.; McDuff, D.J.; Picard, R.W. Non-contact, automated cardiac pulse measurements using video imaging and blind source separation. Opt. Express 2010, 18, 10762–10774. [Google Scholar] [CrossRef] [PubMed]
- De Haan, G.; Jeanne, V. Robust Pulse Rate from Chrominance-Based rPPG. IEEE Trans. Biomed. Eng. 2013, 60, 2878–2886. [Google Scholar] [CrossRef] [PubMed]
- De Haan, G.; Van Leest, A. Improved motion robustness of remote-PPG by using the blood volume pulse signature. Physiol. Meas. 2014, 35, 1913–1926. [Google Scholar] [CrossRef] [PubMed]
- Yan, Y.; Ma, X.; Yao, L.; Ouyang, J. Noncontact measurement of heart rate using facial video illuminated under natural light and signal weighted analysis. Biol. Med. Mater. Eng. 2015, 26, S903–S909. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Starr, I.; Rawson, A.J.; Schroeder, H.A.; Joseph, N.R. Studies on the Estimation of Cardiac Output in Man, and of Abnormalities in Cardiac Function, from the heart’s Recoil and the blood’s Impacts; the Ballistocardiogram. Am. J. Physiol. Leg. Content 1939, 127, 1–28. [Google Scholar] [CrossRef]
- Rouast, P.V.; Adam, M.T.P.; Chiong, R.; Cornforth, D.; Lux, E. Remote heart rate measurement using low-cost RGB face video: A technical literature review. Front. Comput. Sci. 2018, 12, 858–872. [Google Scholar] [CrossRef]
- Balakrishnan, G.; Durand, F.; Guttag, J. Detecting pulse from head motions in video. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Portland, OR, USA, 23–28 June 2013; pp. 3430–3437. [Google Scholar]
- Shan, L.; Yu, M. Video-based heart rate measurement using head motion tracking and ICA. In Proceedings of the 2013 6th International Congress on Image and Signal Processing (CISP), Hangzhou, China, 16–18 December 2013; pp. 160–164. [Google Scholar]
- Haque, M.A.; Nasrollahi, K.; Moeslund, T.B.; Irani, R. Facial video-based detection of physical fatigue for maximal muscle activity. IET Comput. Vis. 2016, 10, 323–330. [Google Scholar] [CrossRef]
- Hassan, M.A.; Malik, A.S.; Fofi, D.; Saad, N.M.; Ali, Y.S.; Meriaudeau, F. Video-Based Heartbeat Rate Measuring Method Using Ballistocardiography. IEEE Sens. J. 2017, 17, 4544–4557. [Google Scholar] [CrossRef]
- Zeiler, M.D.; Fergus, R. Visualizing and Understanding Convolutional Networks. In Proceedings of the European Conference on Computer Vision (ECCV), Zurich, Switzerland, 6–12 September 2014; pp. 818–833. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVRP), Las Vegas, NV, USA, 26 June–1 July 2016; pp. 770–778. [Google Scholar]
- Kim, Y. Convolutional Neural Networks for Sentence Classification. In Proceedings of the 2014 Conference on Empirical Methods in Natural Language Processing (EMNLP), Doha, Qatar, 25–29 October 2014. [Google Scholar]
- Schlüter, J.; Grill, T. Exploring Data Augmentation for Improved Singing Voice Detection with Neural Networks. In Proceedings of the International Society for Music Information Retrieval Conference (ISMIR), Malaga, Spain, 26–30 October 2015; pp. 121–126. [Google Scholar]
- Um, T.T.; Babakeshizadeh, V.; Kulic, D. Exercise Motion Classification from Large-Scale Wearable Sensor Data Using Convolutional Networks. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017. [Google Scholar]
- Lee, H.; Whang, M. Heart Rate Estimated from Body Movements at Six Degrees of Freedom by Convolutional Neural Networks. Sensors 2018, 18, 1392. [Google Scholar] [CrossRef] [PubMed]
- Grira, N.; Crucianu, M.; Boujemaa, N. Unsupervised and semi-supervised clustering: A brief survey. Rev. Mach. Learn. Tech. Process. Multimed. Content 2004, 1, 9–16. [Google Scholar]
- Viola, P.; Jones, M. Rapid object detection using a boosted cascade of simple features. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Kauai, HI, USA, 8–14 December 2001; pp. 511–518. [Google Scholar]
- Tommasini, T.; Fusiello, A.; Trucco, E.; Roberto, V. Making good features track better. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Santa Barbara, CA, USA, 23–25 June 1998; pp. 178–183. [Google Scholar]
- Bouguet, J.Y. Pyramidal implementation of the affine lucas kanade feature tracker description of the algorithm. Intel Corp. 2001, 5, 4. [Google Scholar]
- Pan, J.; Tompkins, W.J. A Real-Time QRS Detection Algorithm. IEEE Trans. Biomed. Eng. 1985, 32, 230–236. [Google Scholar] [CrossRef] [PubMed]
- Wong, M.A.; Hartigan, J.A. Algorithm AS 136: A K-Means Clustering Algorithm. J. R. Stat. Soc. Ser. C Appl. Stat. 1979, 28, 100–108. [Google Scholar]
- Soleymani, M.; Lichtenauer, J.; Pun, T.; Pantic, M. A Multimodal Database for Affect Recognition and Implicit Tagging. IEEE Trans. Affect. Comput. 2012, 3, 42–55. [Google Scholar] [CrossRef]
- Jones, E.; Oliphant, T.; Peterson, P. SciPy: Open Source Scientific Tools for Python. Available online: http://www.scipy.org (accessed on 11 March 2019).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Signal Extraction | Signal Estimation | Heart Rate Estimation |
|---|---|---|---|
| Bal et al. 2013 [9] | VJ + GFTT + KLT | Bandpass + PCA | Peak detection, FFT |
| Shan et al. 2013 [10] | VJ + GFTT + KLT | Norm + Bandpass + ICA | FFT |
| Haque et al. 2016 [11] | VJ + GFTT + SDM | Bandpass + MA + PCA | FFT |
| Hassan et al. 2017 [12] | VJ + SCFS + KLT | Bandpass + SVD | FFT |
| Heart Rate Estimation | MAE | SDAE | RMSE | CC |
|---|---|---|---|---|
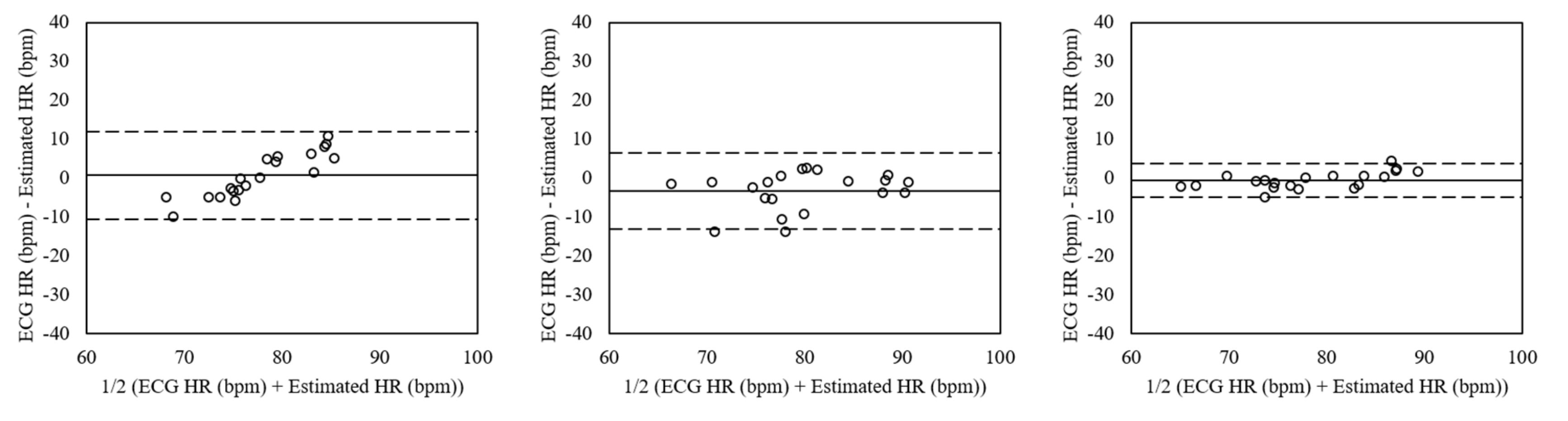
| Peak Detection | 3.95 | 2.49 | 4.70 | 0.933 ** |
| FFT | 2.76 | 5.91 | 6.61 | 0.967 ** |
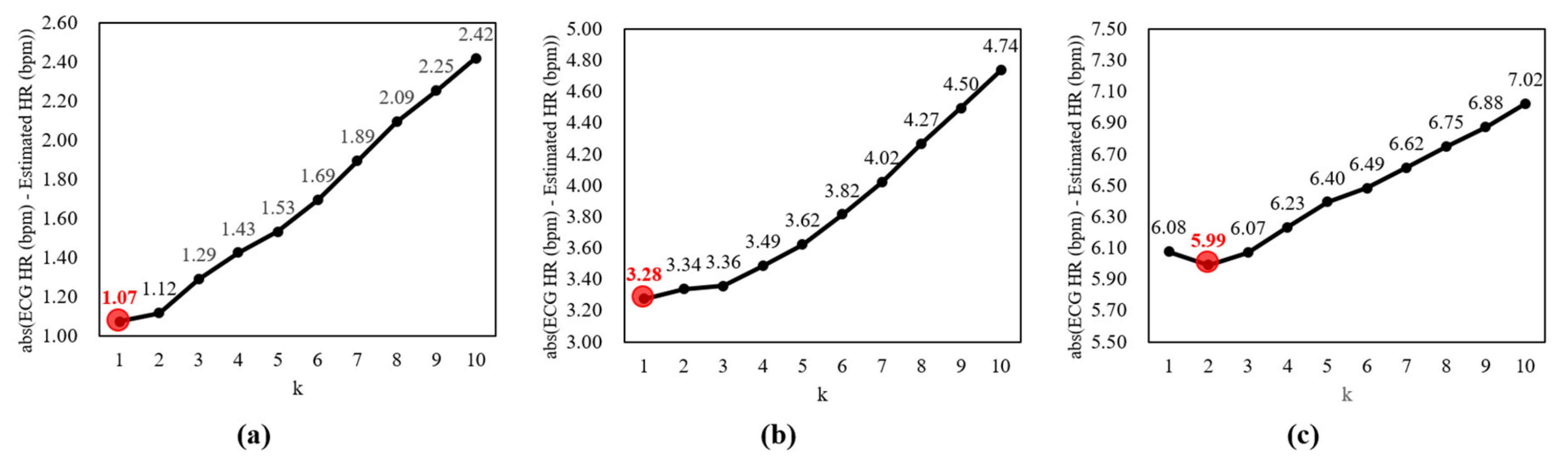
| Clustering | 1.07 | 0.99 | 1.47 | 0.999 ** |
| Heart Rate Estimation | MAE | SDAE | RMSE | CC |
|---|---|---|---|---|
| Peak Detection | 5.66 | 3.81 | 6.85 | 0.829 ** |
| FFT | 10.08 | 12.93 | 16.68 | 0.776 ** |
| Clustering | 3.28 | 3.45 | 4.84 | 0.970 ** |
| Heart Rate Estimation. | MAE | SDAE | RMSE | CC |
|---|---|---|---|---|
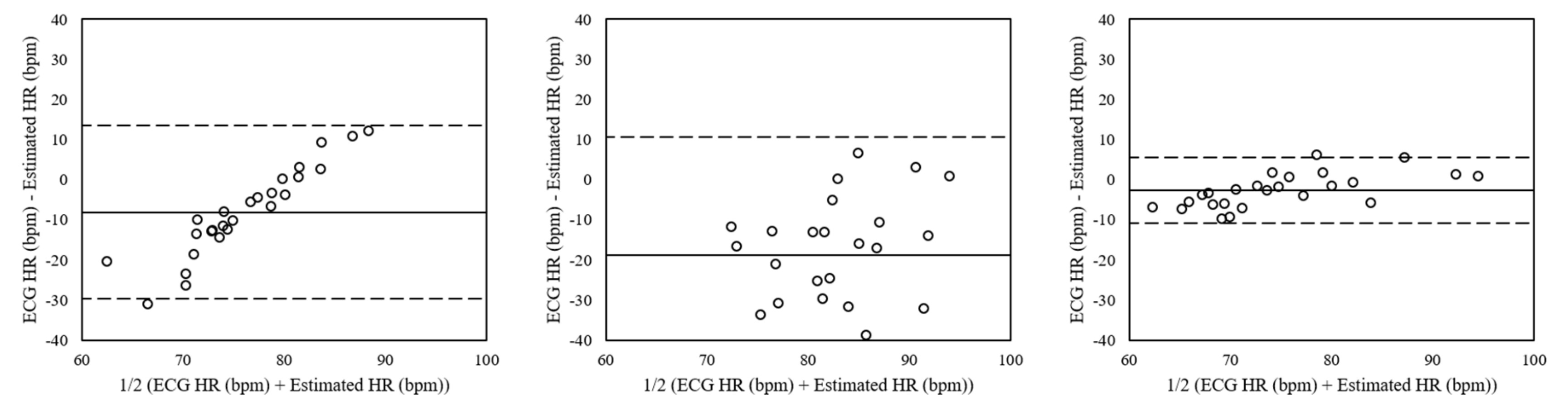
| Peak Detection | 11.74 | 3.96 | 12.56 | 0.290 |
| FFT | 23.89 | 15.71 | 29.33 | 0.066 |
| Clustering | 5.99 | 5.24 | 8.09 | 0.836 ** |
| Methods | MAE | SDAE | RMSE | CC |
|---|---|---|---|---|
| Bal et al. 2013 [9] | 21.68 | 11.91 | 24.72 | 0.10 |
| Shan et al. 2013 [10] | 7.88 | 4.66 | 9.14 | 0.27 |
| Haque et al. 2016 [11] | 6.47 | 3.62 | 7.56 | 0.84** |
| Hassan et al. 2017 [12] | 4.34 | 3.14 | 5.29 | 0.921** |
| Proposed method | 5.99 | 5.24 | 8.09 | 0.836** |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, H.; Cho, A.; Lee, S.; Whang, M. Vision-Based Measurement of Heart Rate from Ballistocardiographic Head Movements Using Unsupervised Clustering. Sensors 2019, 19, 3263. https://doi.org/10.3390/s19153263
Lee H, Cho A, Lee S, Whang M. Vision-Based Measurement of Heart Rate from Ballistocardiographic Head Movements Using Unsupervised Clustering. Sensors. 2019; 19(15):3263. https://doi.org/10.3390/s19153263
Chicago/Turabian StyleLee, Hyunwoo, Ayoung Cho, Seongwon Lee, and Mincheol Whang. 2019. "Vision-Based Measurement of Heart Rate from Ballistocardiographic Head Movements Using Unsupervised Clustering" Sensors 19, no. 15: 3263. https://doi.org/10.3390/s19153263
APA StyleLee, H., Cho, A., Lee, S., & Whang, M. (2019). Vision-Based Measurement of Heart Rate from Ballistocardiographic Head Movements Using Unsupervised Clustering. Sensors, 19(15), 3263. https://doi.org/10.3390/s19153263