A Hybrid Two-Axis Force Sensor for the Mesoscopic Structural Superlubricity Studies


Abstract
:
1. Introduction
2. Design Principles
2.1. The Hybrid Concept
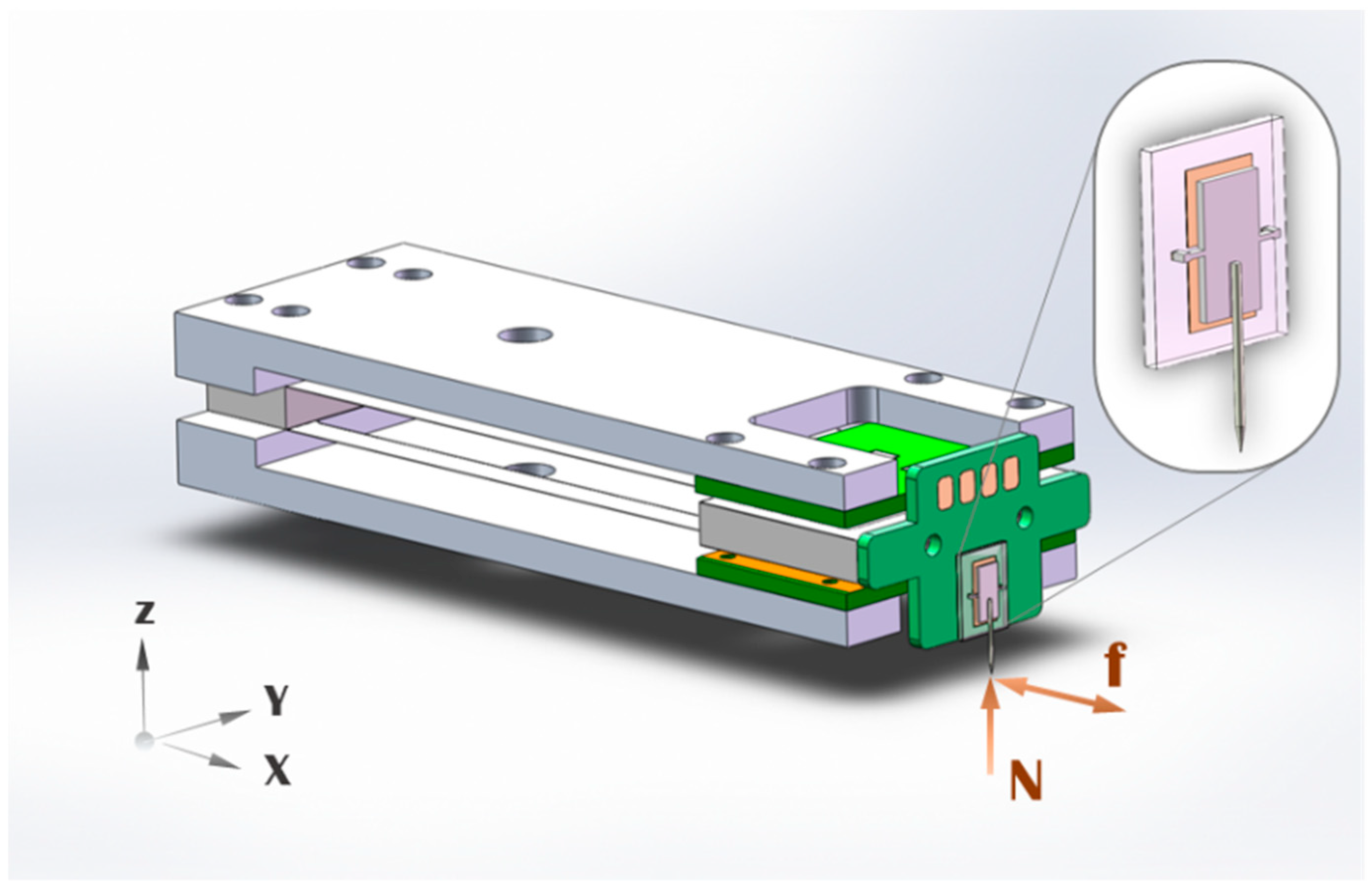
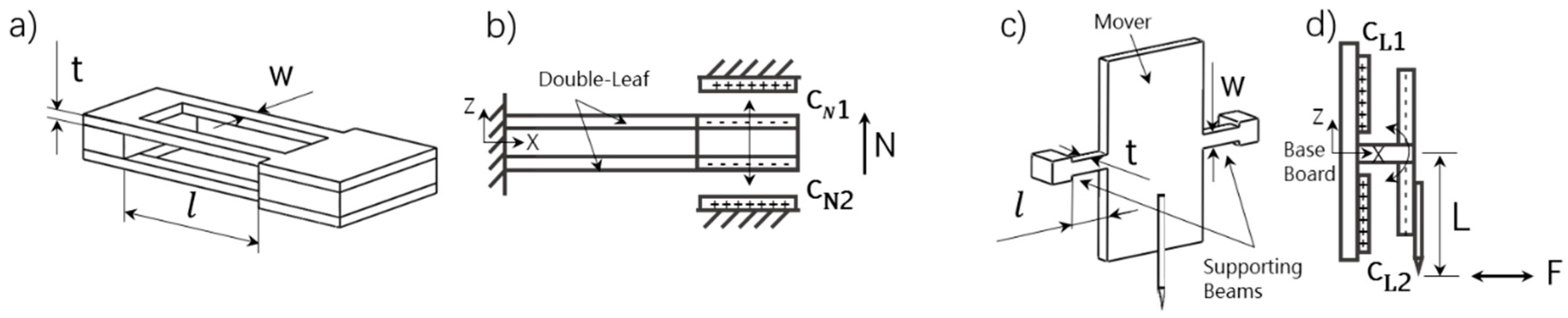
2.2. Sensor Design
3. Analysis of the Hybrid Design
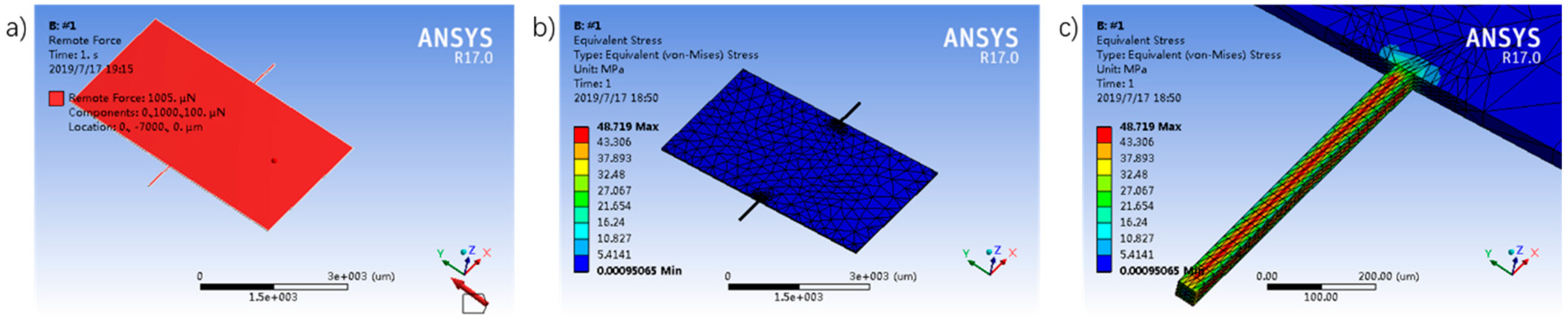
3.1. Strength of the Micro Structure
3.2. Coupling of the Signals
3.3. Assembly Errors
4. Performance
4.1. The Test System
4.2. Sensor Calibrations
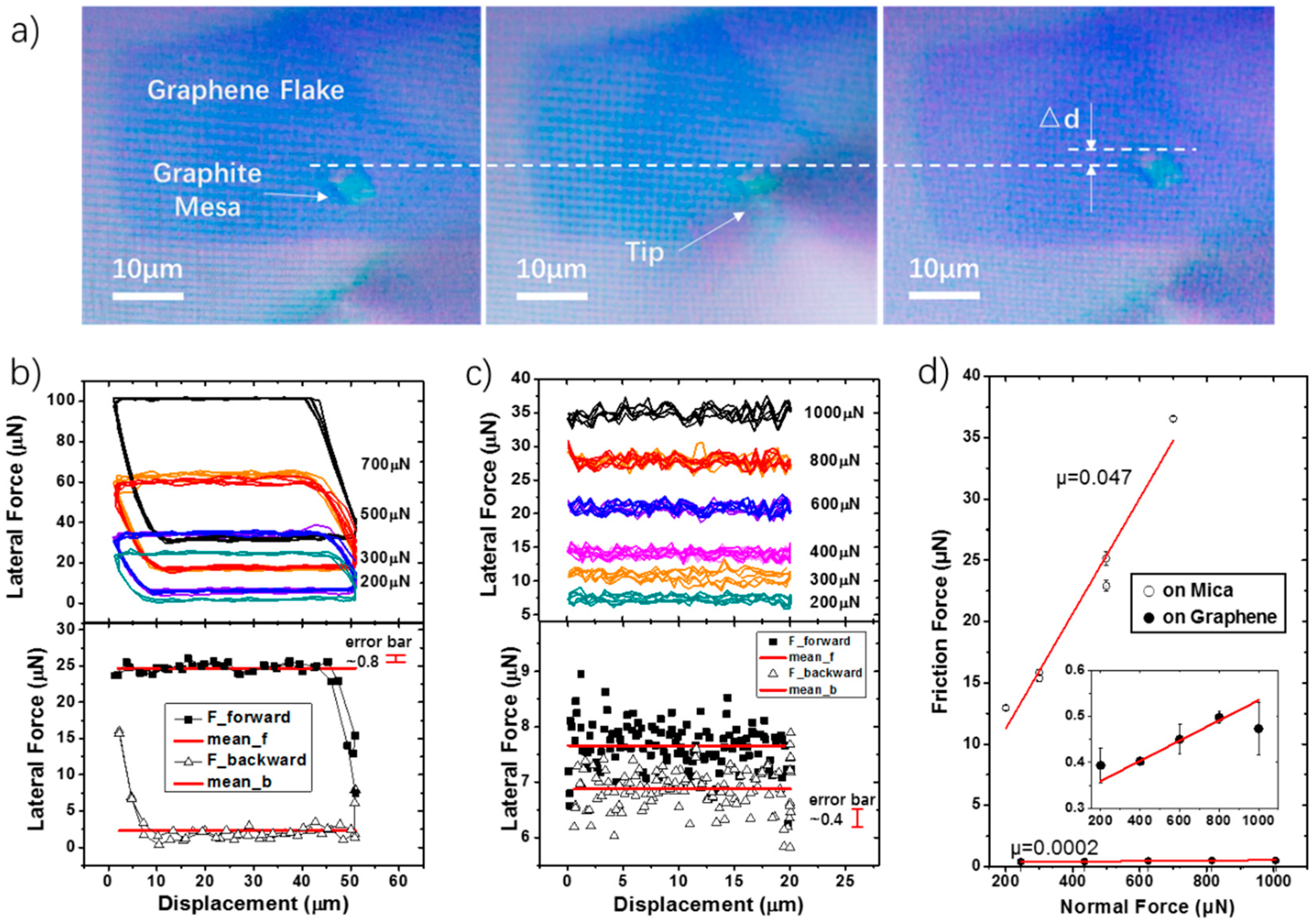
4.3. Friction Experiments
5. Discussion
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Peyrard, M.; Aubry, S. Critical-Behavior at the Transition by Breaking of Analyticity in the Discrete Frenkel-Kontorova Model. J. Phys. C Solid State Phys. 1983, 16, 1593–1608. [Google Scholar] [CrossRef]
- Dienwiebel, M.; Verhoeven, G.S.; Pradeep, N.; Frenken, J.W.M.; Heimberg, J.A.; Zandbergen, H.W. Superlubricity of graphite. Phys. Rev. Lett. 2004, 92, 126101. [Google Scholar] [CrossRef] [PubMed]
- Dietzel, D.; Feldmann, M.; Schwarz, U.D.; Fuchs, H.; Schirmeisen, A. Scaling Laws of Structural Lubricity. Phys. Rev. Lett. 2013, 111, 235502. [Google Scholar] [CrossRef] [PubMed]
- Feng, X.; Kwon, S.; Park, J.Y.; Salmeron, M. Superlubric Sliding of Graphene Nanoflakes on Graphene. ACS Nano 2013, 7, 1718–1724. [Google Scholar] [CrossRef] [PubMed]
- Dietzel, D.; de Wijn, A.S.; Vorholzer, M.; Schirmeisen, A. Friction fluctuations of gold nanoparticles in the superlubric regime. Nanot 2018, 29, 155702. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Li, J.; Luo, J. Superlubricity of Graphite Sliding against Graphene Nanoflake under Ultrahigh Contact Pressure. Adv. Sci. 2018, 5, 1800810. [Google Scholar] [CrossRef]
- Liu, Y.; Song, A.; Xu, Z.; Zong, R.; Zhang, J.; Yang, W.; Wang, R.; Hu, Y.; Luo, J.; Ma, T. Interlayer Friction and Superlubricity in Single-Crystalline Contact Enabled by Two-Dimensional Flake-Wrapped Atomic Force Microscope Tips. ACS Nano 2018, 12, 7638–7646. [Google Scholar] [CrossRef]
- Liu, Z.; Yang, J.; Grey, F.; Liu, J.Z.; Liu, Y.; Wang, Y.; Yang, Y.; Cheng, Y.; Zheng, Q. Observation of Microscale Superlubricity in Graphite. Phys. Rev. Lett. 2012, 108, 205503. [Google Scholar] [CrossRef] [Green Version]
- Zhang, R.; Ning, Z.; Zhang, Y.; Zheng, Q.; Chen, Q.; Xie, H.; Zhang, Q.; Qian, W.; Wei, F. Superlubricity in centimetres-long double-walled carbon nanotubes under ambient conditions. Nat. Nanotechnol. 2013, 8, 912–916. [Google Scholar] [CrossRef]
- Zheng, Q.; Liu, Z. Experimental advances in superlubricity. Friction 2014, 2, 182–192. [Google Scholar] [CrossRef] [Green Version]
- Vu, C.C.; Zhang, S.; Urbakh, M.; Li, Q.; He, Q.C.; Zheng, Q. Observation of normal-force-independent superlubricity in mesoscopic graphite contacts. Phys. Rev. B 2016, 94, 081405. [Google Scholar] [CrossRef] [Green Version]
- Deng, H.; Ma, M.; Song, Y.; He, Q.; Zheng, Q. Structural superlubricity in graphite flakes assembled under ambient conditions. Nanoscale 2018, 10, 14314–14320. [Google Scholar] [CrossRef] [PubMed]
- Song, Y.; Mandelli, D.; Hod, O.; Urbakh, M.; Ma, M.; Zheng, Q. Robust microscale superlubricity in graphite/hexagonal boron nitride layered heterojunctions. Nat. Mater. 2018, 17, 894. [Google Scholar] [CrossRef] [PubMed]
- Liu, S.-W.; Wang, H.-P.; Xu, Q.; Ma, T.-B.; Yu, G.; Zhang, C.; Geng, D.; Yu, Z.; Zhang, S.; Wang, W.; et al. Robust microscale superlubricity under high contact pressure enabled by graphene-coated microsphere. Nat. Commun. 2017, 8, 14029. [Google Scholar] [CrossRef] [PubMed]
- Zijlstra, T.; Heimberg, J.A.; van der Drift, E.; van Loon, D.G.; Dienwiebel, M.; de Groot, L.E.M.; Frenken, J.W.M. Fabrication of a novel scanning probe device for quantitative nanotribology. Sens. Actuators A Phys. 2000, 84, 18–24. [Google Scholar] [CrossRef]
- Xu, Y.; Zheng, Q.; Geng, J.; Dong, Y.; Tian, M.; Yao, L.; Dearn, K.D. Synergistic effects of electroless piston ring coatings and nano-additives in oil on the friction and wear of a piston ring/cylinder liner pair. Wear 2019, 422, 201–211. [Google Scholar] [CrossRef]
- Achanta, S.; Celis, J.P. On the scale dependence of coefficient of friction in unlubricated sliding contacts. Wear 2010, 269, 435–442. [Google Scholar] [CrossRef]
- Hod, O.; Meyer, E.; Zheng, Q.; Urbakh, M. Structural superlubricity and ultralow friction across the length scales. Nature 2018, 563, 485–492. [Google Scholar] [CrossRef]
- Wang, W.; Dai, S.; Li, X.; Yang, J.; Srolovitz, D.J.; Zheng, Q. Measurement of the cleavage energy of graphite. Nat. Commun. 2015, 6, 8853. [Google Scholar] [CrossRef]
- Sun, Y.; Nelson, B.J.; Potasek, D.P.; Enikov, E. A bulk microfabricated multi-axis capacitive cellular force sensor using transverse comb drives. J. Micromech. Microeng. 2002, 12, 832–840. [Google Scholar] [CrossRef]
- Beyeler, F.; Muntwyler, S.; Nelson, B.J. A Six-Axis MEMS Force-Torque Sensor With Micro-Newton and Nano-Newtonmeter Resolution. JMemS 2009, 18, 433–441. [Google Scholar] [CrossRef]
- Muntwyler, S.; Beyeler, F.; Nelson, B.J. Three-axis micro-force sensor with sub-micro-Newton measurement uncertainty and tunable force range. J. Micromech. Microeng. 2010, 20, 025011. [Google Scholar] [CrossRef]
- Michalowski, M.; Luczak, S. AFM cantilevers with spherical tip of millimeter size. J. Micromech. Microeng. 2019, 29. [Google Scholar] [CrossRef]
- Canale, L.; Comtet, J.; Niguès, A.; Cohen, C.; Clanet, C.; Siria, A.; Bocquet, L. Nanorheology of interfacial water during ice gliding. arXiv 2019, arXiv:1907.01316. [Google Scholar]
- Giessibl, F.J. The qPlus sensor, a powerful core for the atomic force microscope. Rev. Sci. Instrum. 2019, 90, 011101. [Google Scholar] [CrossRef] [PubMed]
- Garabedian, N.T.; Khare, H.S.; Carpick, R.W.; Burris, D.L. AFM at the Macroscale: Methods to Fabricate and Calibrate Probes for Millinewton Force Measurements. Tribol. Lett. 2019, 67, 21. [Google Scholar] [CrossRef]
- Li, M.; Huang, W.; Wang, X. Advanced adhesion and friction measurement system. Meas. Sci. Technol. 2017, 28, 035601. [Google Scholar] [CrossRef]
- Hou, B.; Zhou, B.; Li, X.; Gao, Z.; Wei, Q.; Zhang, R. An Analog Interface Circuit for Capacitive Angle Encoder Based on a Capacitance Elimination Array and Synchronous Switch Demodulation Method. Sensors 2019, 19, 3116. [Google Scholar] [CrossRef] [PubMed]
- Joyce, S.A.; Houston, J.E. A New Force Sensor Incorporating Force-Feedback Control for Interfacial Force Microscopy. Rev. Sci. Instrum. 1991, 62, 710–715. [Google Scholar] [CrossRef]
- Hata, Y.; Nonomura, Y.; Omura, Y.; Nakayama, T.; Fujiyoshi, M.; Funabashi, H.; Akashi, T.; Muroyama, M.; Tanaka, S. Quad-seesaw-electrode type 3-axis tactile sensor with low nonlinearities and low cross-axis sensitivities. Sens. Actuatorsa 2017, 266, 24–35. [Google Scholar] [CrossRef]
- Ye, J.; Sun, T.; Huang, D.; Li, Z.; Lin, L. Stand-alone differential capacitance force sensors with sub-nano-newton sensitivity. J. Micromech. Microeng. 2017, 27, 095017. [Google Scholar] [CrossRef]
- Van Kessel, P.F.; Hornbeck, L.J.; Meier, R.E.; Douglass, M.R. MEMS-based projection display. Proc. IEEE 1998, 86, 1687–1704. [Google Scholar] [CrossRef]
- Ogletree, D.F.; Carpick, R.W.; Salmeron, M. Calibration of frictional forces in atomic force microscopy. Rev. Sci. Instrum. 1996, 67, 3298–3306. [Google Scholar] [CrossRef] [Green Version]
- Khare, H.S.; Burris, D.L. The extended wedge method: Atomic force microscope friction calibration for improved tolerance to instrument misalignments, tip offset, and blunt probes. Rev. Sci. Instrum. 2013, 84, 055108. [Google Scholar] [CrossRef] [PubMed]
- Qu, C.; Liu, B.; Ma, M.; Zheng, Q. Design and optimization of the diamagnetic lateral force calibration method. Rev. Sci. Instrum. 2018, 89, 113704. [Google Scholar] [CrossRef] [PubMed]
- Li, Q.; Kim, K.S.; Rydberg, A. Lateral force calibration of an atomic force microscope with a diamagnetic levitation spring system. Rev. Sci. Instrum. 2006, 77, 065105. [Google Scholar] [CrossRef]
- Zheng, Q.; Jiang, B.; Liu, S.; Weng, Y.; Lu, L.; Xue, Q.; Zhu, J.; Jiang, Q.; Wang, S.; Peng, L. Self-retracting motion of graphite microflakes. Phys. Rev. Lett. 2008, 100, 067205. [Google Scholar] [CrossRef] [PubMed]
- Lee, H.; Ko, J.-H.; Choi, J.S.; Hwang, J.H.; Kim, Y.-H.; Salmeron, M.; Park, J.Y. Enhancement of Friction by Water Intercalated between Graphene and Mica. J. Phys. Chem. Lett. 2017, 8, 3482–3487. [Google Scholar] [CrossRef]
- Lee, H.; Ko, J.-H.; Song, H.C.; Salmeron, M.; Kim, Y.-H.; Park, J.Y. Isotope-and Thickness-Dependent Friction of Water Layers Intercalated Between Graphene and Mica. Tribol. Lett. 2018, 66, 36. [Google Scholar] [CrossRef]
- Grigg, D.A.; Russell, P.E.; Griffith, J.E. Rocking-Beam Force-Balance Approach to Atomic Force Microscopy. Ultramicroscopy 1992, 42, 1504–1508. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structure | Thickness t (mm) | Width w (mm) | Length l (mm) | Distance L (mm) | Stiffness 1 K (N/m) | |
|---|---|---|---|---|---|---|
| Double-Cantilever | 0.2 | 35 | 56 | 127.55 | ||
| Teeter-Totter | #1 | 0.04 | 0.04 | 0.7 | 7 | 1.30 |
| #2 | 0.04 | 0.04 | 0.4 | 5.6 | 3.57 | |
| #3 | 0.04 | 0.04 | 0.4 | 6.2 | 2.91 | |
| #4 | 0.04 | 0.08 | 0.7 | 7 | 4.24 | |
| #5 | 0.04 | 0.12 | 0.7 | 4.9 | 14.90 | |
| No. | Range | Resolu. (nN) | Max Load (mN) | |||
|---|---|---|---|---|---|---|
| (°) | d (μm) | F (μN) | ||||
| #2 | 3.38 | ±0.09 | ±9.38 | ±30 | 10 | 0.683 |
| #3 | 4.98 | ±0.09 | ±10.04 | ±70 | 30 | 0.926 |
| #5 | 13.61 | ±0.08 | ±7.34 | ±170 | 80 | 5.05 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, T.; Wu, Z.; Li, Z.; Zheng, Q.; Lin, L. A Hybrid Two-Axis Force Sensor for the Mesoscopic Structural Superlubricity Studies. Sensors 2019, 19, 3431. https://doi.org/10.3390/s19153431
Sun T, Wu Z, Li Z, Zheng Q, Lin L. A Hybrid Two-Axis Force Sensor for the Mesoscopic Structural Superlubricity Studies. Sensors. 2019; 19(15):3431. https://doi.org/10.3390/s19153431
Chicago/Turabian StyleSun, Taotao, Zhanghui Wu, Zhihong Li, Quanshui Zheng, and Li Lin. 2019. "A Hybrid Two-Axis Force Sensor for the Mesoscopic Structural Superlubricity Studies" Sensors 19, no. 15: 3431. https://doi.org/10.3390/s19153431
APA StyleSun, T., Wu, Z., Li, Z., Zheng, Q., & Lin, L. (2019). A Hybrid Two-Axis Force Sensor for the Mesoscopic Structural Superlubricity Studies. Sensors, 19(15), 3431. https://doi.org/10.3390/s19153431