Data Mining and Statistical Approaches in Debris-Flow Susceptibility Modelling Using Airborne LiDAR Data

 ,
,  ,
,  and
and 
Abstract
:1. Introduction
2. Research Background
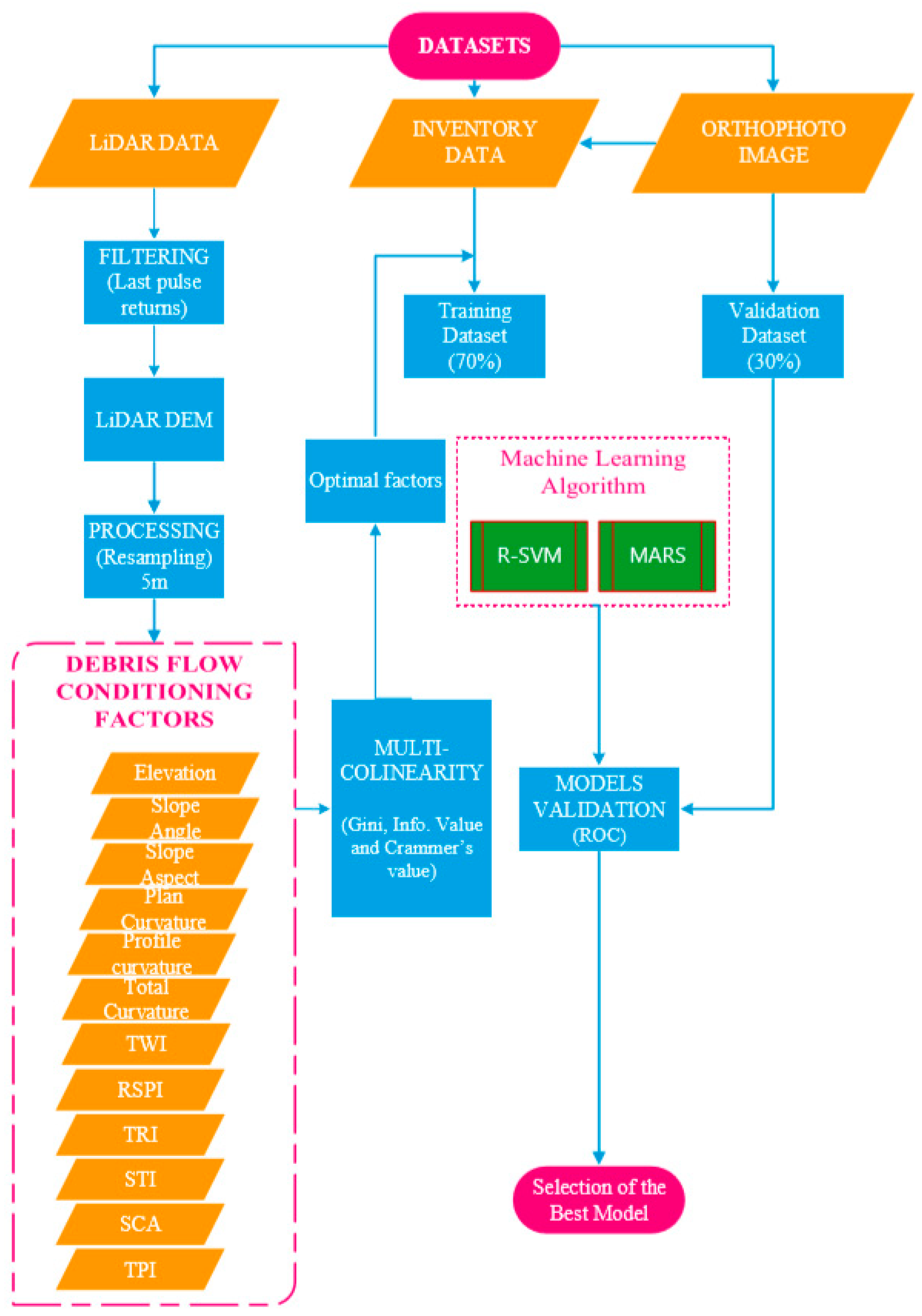
3. Materials and Methods
3.1. Data, Software and Techniques
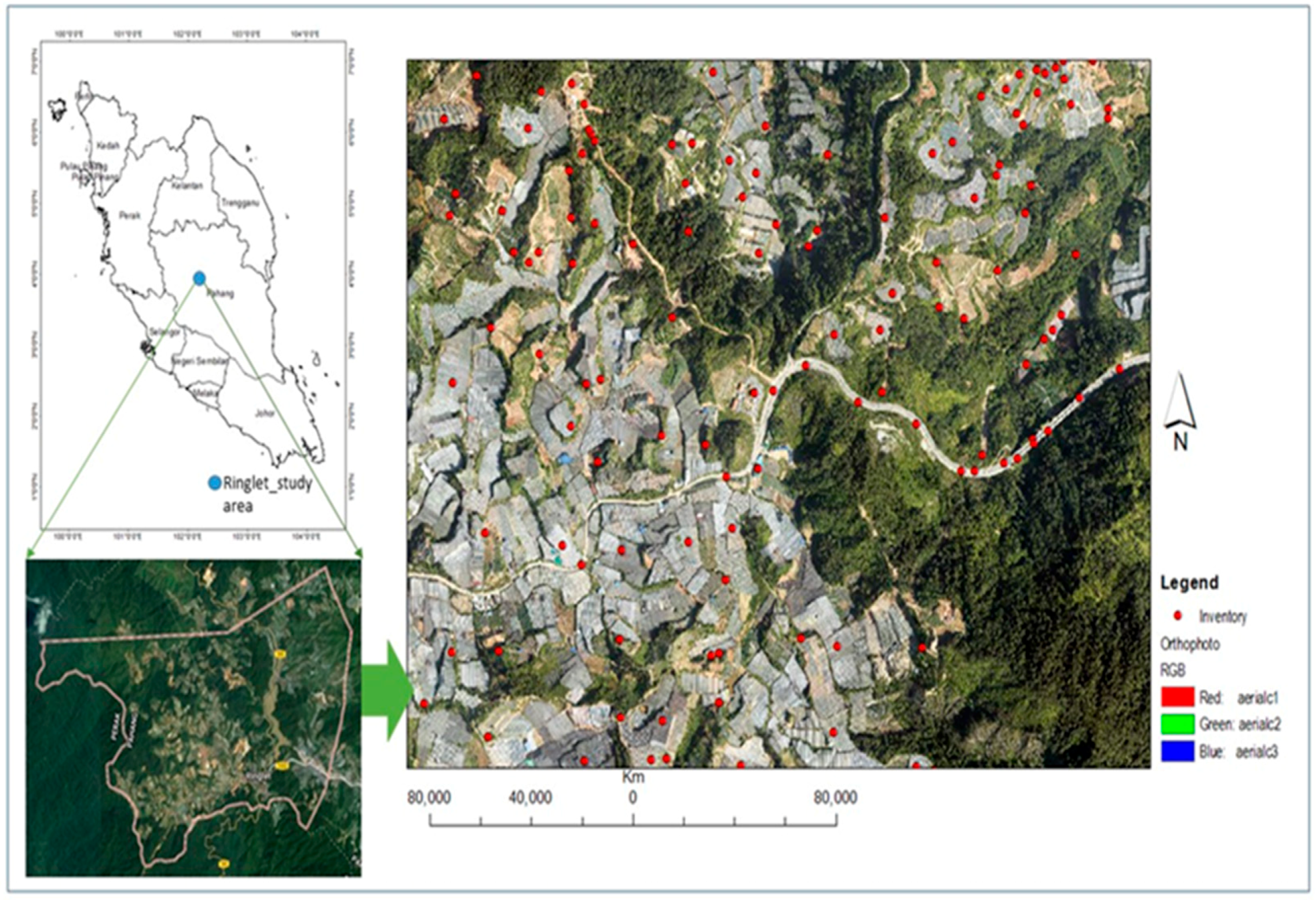
3.2. LiDAR Data Acquisition and Preparation
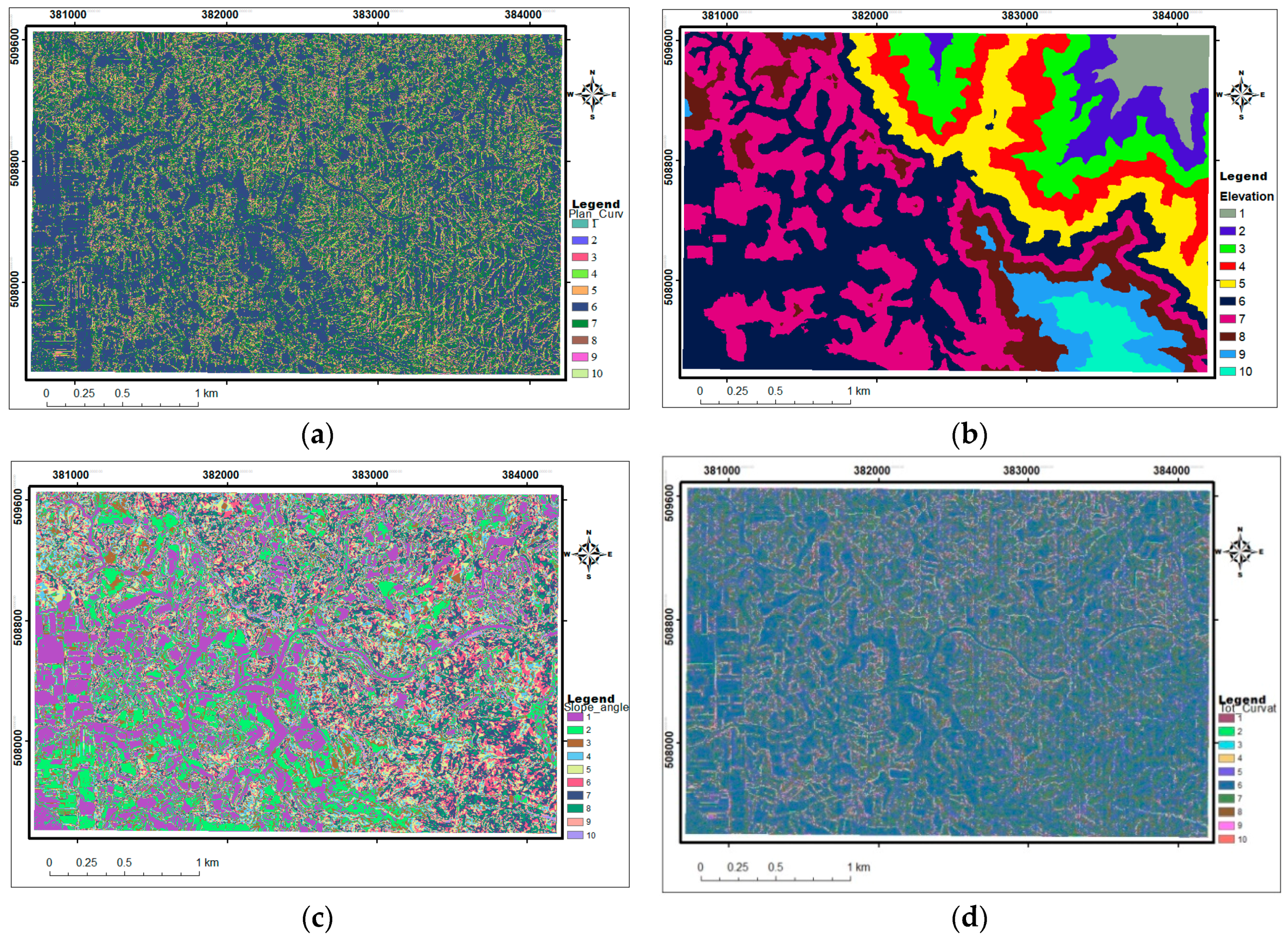
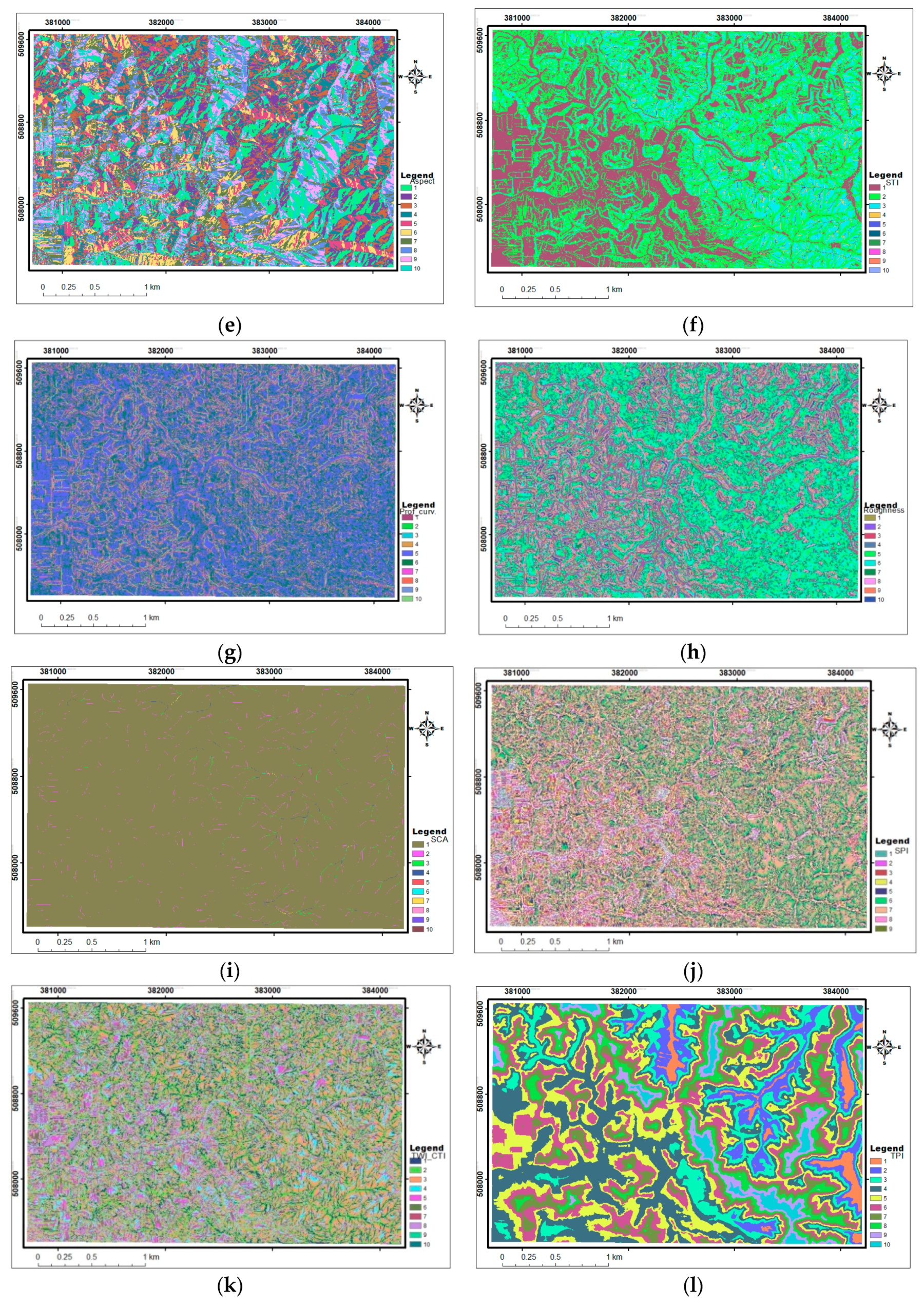
3.2.1. Derivation of Conditioning Factors
3.2.2. Inventory Data for Model Training and Validation
3.3. Debris Flow Susceptibility Modeling
3.3.1. Debris Flow Conditioning Factor Selection
3.3.2. Multivariate Adaptive Regression Splines (MARS)
3.3.3. Support Vector Machine (SVM)
3.4. Model Validation and Evaluation
4. Results
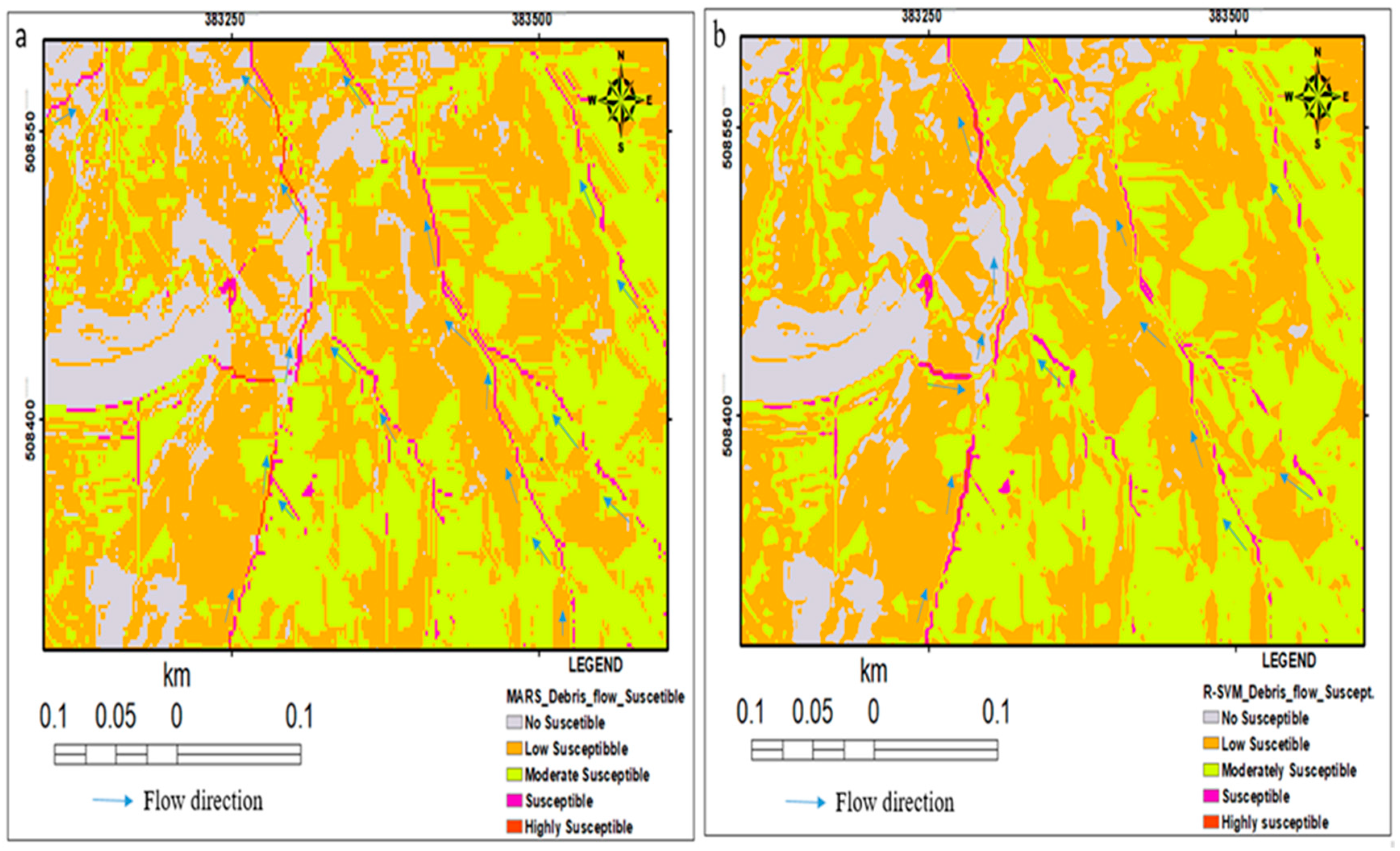
4.1. R-SVM for Debris Flow Susceptibility Mapping
4.2. Debris Flow Susceptibility Mapping with MARS Approach
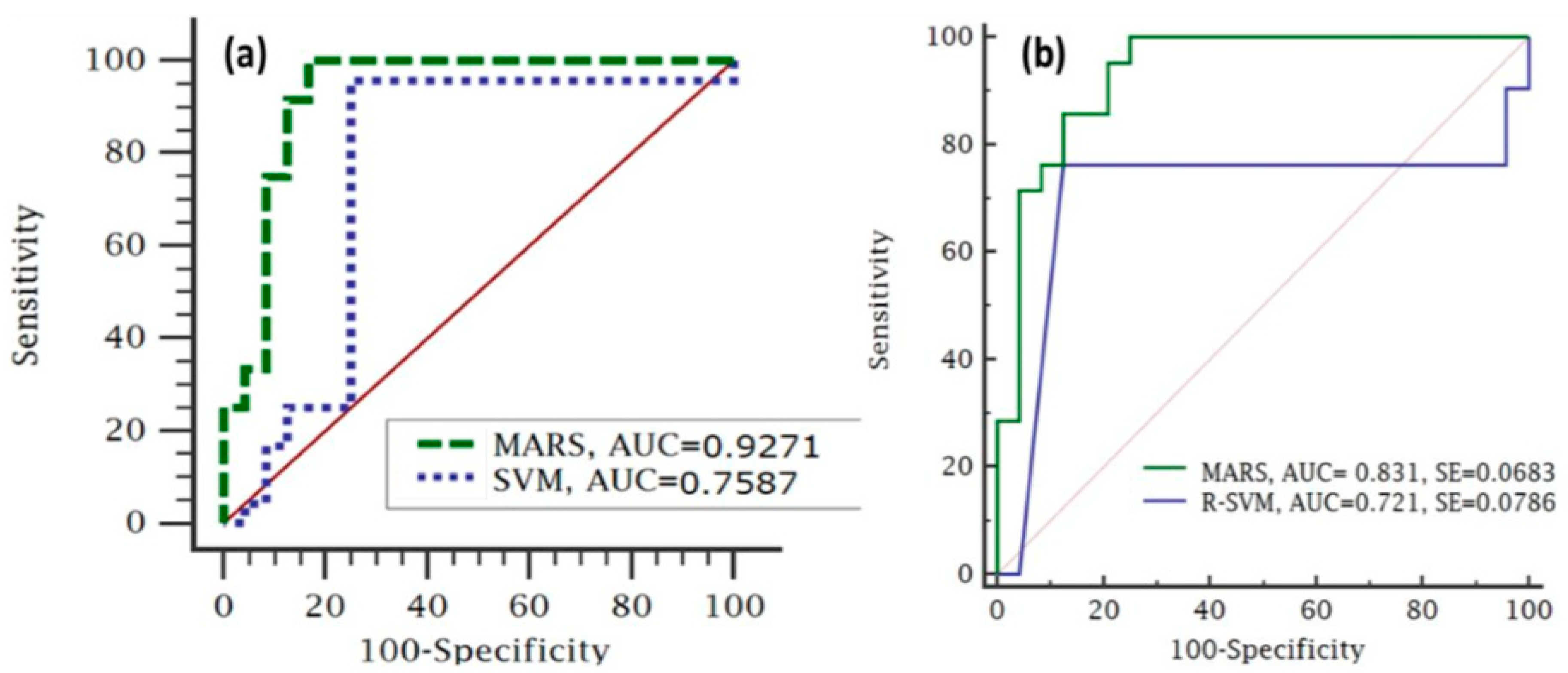
4.3. Model Performance Evaluation
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Iverson, R.M.; Reid, M.E.; Lahusen, R.G. Debris-Flow Mobilization from Landslides. Ann. Rev. Earth Planet. Sci. 1997, 25, 85–138. [Google Scholar] [CrossRef]
- Iverson, R.M.; George, D.L. A depth-averaged debris-flow model that includes the effects of evolving dilatancy. I. Physical basis. Proc. R. Soc. A 2014. [Google Scholar] [CrossRef]
- Iverson, R.M. Debris-Flow Hazards and Related Phenomena. In Debris-flow mechanics; Jakob, M., Hungr, O., Eds.; Springer: Berlin/Heidelberg, Germany, 2005; pp. 105–131. [Google Scholar]
- Hürlimann, M.; McArdell, B.W.; Rickli, C. Field and laboratory analysis of the runout characteristics of hillslope debris flows in Switzerland. Geomorphology 2015, 232, 20–32. [Google Scholar] [CrossRef] [Green Version]
- Melzner, S.; Lotter, M.; Linner, M.; Kociu, A. Regional analysis of slope instability processes along the southern border of the central Tauern Window (Eastern Alps). Austrian J. Earth Sci. 2015, 108, 93–110. [Google Scholar] [CrossRef]
- Chen, W.; Peng, J.; Hong, H.; Shahabi, H.; Pradhan, B.; Liu, J.; Zhu, A.X.; Pei, X.; Duan, Z. Landslide susceptibility modelling using GIS-based machine learning techniques for Chongren County, Jiangxi Province, China. Sci. Total Environ. 2018, 626, 1121–1135. [Google Scholar] [CrossRef] [PubMed]
- Chattoraj, S.L. Debris Flow Modelling and Risk Assessment of Selected Landslides from Uttarakhand-Case Studies Using Earth Observation Data. In Remote Sensing Techniques and GIS Applications in Earth and Environmental Studies; IGI: Hershey, PA, USA, 2017; pp. 111–121. [Google Scholar]
- Xing, A.; Wang, G.; Li, B.; Jiang, Y.; Feng, Z.; Kamai, T. Long-runout mechanism and landsliding behaviour of large catastrophic landslide triggered by heavy rainfall in Guanling, Guizhou, China. Can. Geotech. J. 2015, 52, 971–981. [Google Scholar] [CrossRef]
- Xing, A.; Yuan, X.; Xu, Q.; Zhao, Q.; Huang, H.; Cheng, Q. Characteristics and numerical runout modelling of a catastrophic rock avalanche triggered by the Wenchuan earthquake in the Wenjia valley, Mianzhu, Sichuan, China. Landslides 2017, 14, 83–98. [Google Scholar] [CrossRef]
- Nakatani, K.; Hayami, S.; Mizuyama, T. Case study of debris flow disaster scenario caused by torrential rain on Kiyomizu-dera, Kyoto, Japan-using Hyper KANAKO system. J. Mt. Sci. 2016, 13, 193–203. [Google Scholar] [CrossRef]
- Lay, U.S.; Pradhan, B. Identification of Debris Flow Initiation Zones Using Topographic Model and Airborne Laser Scanning Data. In Lecture Notes in Civil Engineering; Pradhan, B., Ed.; Springer Nature: Singerpore, 2019; pp. 915–940. [Google Scholar]
- Schraml, K.; Thomschitz, B.; Mcardell, B.W.; Graf, C.; Kaitna, R. Modeling debris-flow runout patterns on two alpine fans with different dynamic simulation models. Nat. Hazards Earth Syst. Sci. 2015, 15, 1483–1492. [Google Scholar] [CrossRef] [Green Version]
- Toyos, M.T.; Gunasekera, G.; Zanchetta, R.; Oppenheimer, G.; Sulpizio, C.; Favalli, R.; Pareschi, M. GIS-assisted modelling for debris flow hazard assessment based on the events of May 1998 in the area of Sarno, Southern Italy. Part II: Velocity and Dynamic Pressure. Earth Surf. Process. Landf. 2008, 33. [Google Scholar] [CrossRef]
- Berti, M.; Genevois, R.; Simoni, A.; Tecca, P.R. Field observations of a debris flow event in the Dolomites. Geomorphology 1999, 29, 265–274. [Google Scholar] [CrossRef]
- Berti, M.; Simoni, A. Experimental evidences and numerical modelling of debris flow initiated by channel runoff. Landslides 2005, 2, 171–182. [Google Scholar] [CrossRef]
- Kean, J.W.; McCoy, S.W.; Tucker, G.E.; Staley, D.M.; Coe, J.A. Runoff-generated debris flows: Observations and modeling of surge initiation, magnitude, and frequency. J. Geophys. Res. Earth Surf. 2013, 118, 2190–2207. [Google Scholar] [CrossRef]
- Gregoretti, C.; Degetto, M.; Bernard, M.; Boreggio, M. The Debris Flow Occurred at Ru Secco Creek, Venetian Dolomites, on 4 August 2015: Analysis of the Phenomenon, Its Characteristics and Reproduction by Models. Front. Earth Sci. 2018, 6, 1–20. [Google Scholar] [CrossRef]
- Legg, N.T.; Meigs, A.J.; Grant, G.E.; Kennard, P. Geomorphology Debris flow initiation in proglacial gullies on Mount Rainier, Washington. Geomorphology 2014, 226, 249–260. [Google Scholar] [CrossRef]
- Theule, J.I.; Liébault, F.; Loye, A.; Laigle, D.; Jaboyedoff, M. Sediment budget monitoring of debris-flow and bedload transport in the Manival Torrent, SE France. Nat. Hazards Earth Syst. Sci. 2012, 12, 731–749. [Google Scholar] [CrossRef] [Green Version]
- Chen, M.L.; Liu, X.N.; Wang, X.K.; Zhao, T.; Zhou, J.W. Contribution of Excessive Supply of Solid Material to a Runoff-Generated Debris Flow during Its Routing along a Gully and Its Impact on the Downstream Village with Blockage Effects. Water 2019, 11, 169. [Google Scholar] [CrossRef]
- Ma, C.; Deng, J.; Wang, R. Analysis of the triggering conditions and erosion of a runoff-triggered debris flow in Miyun County, Beijing, China. Landslides 2018, 15, 2475–2485. [Google Scholar] [CrossRef]
- Armento, M.C.; Genevois, R.; Tecca, P.R. Comparison of numerical models of two debris flows in the Cortina d’ Ampezzo area, Dolomites, Italy. Landslides 2018, 5, 143–150. [Google Scholar] [CrossRef]
- Meinhardt, M.; Fink, M.; Tünschel, H. Landslide susceptibility analysis in central Vietnam based on an incomplete landslide inventory: Comparison of a new method to calculate weighting factors by means of bivariate statistics. Geomorphology 2015, 234, 80–97. [Google Scholar] [CrossRef]
- Cánovas, J.A.B.; Stoffel, M.; Corona, C.; Schraml, K.; Gobiet, A.; Tani, S.; Sinabell, F.; Fuchs, S.; Kaitna, R. Debris-flow risk analysis in a managed torrent based on a stochastic life-cycle performance. Sci. Total Environ. 2016, 557–558, 142–153. [Google Scholar] [CrossRef] [PubMed]
- Dietrich, A.; Krautblatter, M. Evidence for enhanced debris-flow activity in the Northern Calcareous Alps since the 1980s (Plansee, Austria). Geomorphology 2015, 287, 144–158. [Google Scholar] [CrossRef]
- Uzielli, M.; Rianna, G.; Ciervo, F.; Mercogliano, P.; Eidsvig, U.K. Temporal evolution of flow-like landslide hazard for a road infrastructure in the municipality of Nocera Inferiore (southern Italy) under the effect of climate change. Nat. Hazards Earth Syst. Sci. 2018, 18, 3019–3035. [Google Scholar] [CrossRef] [Green Version]
- Chen, C.Y. Landslide and debris flow initiated characteristics after typhoon Morakot in Taiwan. Landslides 2016, 13, 153–164. [Google Scholar] [CrossRef]
- Bel, C.; Liébault, F.; Navratil, O.; Eckert, N.; Bellot, H.; Fontaine, F.; Laigle, D. Rainfall control of debris-flow triggering in the Réal Torrent, Southern French Prealps. Geomorphology 2017, 291, 17–32. [Google Scholar] [CrossRef]
- Underwood, S.J.; Schultz, M.D.; Berti, M.; Gregoretti, C.; Simoni, A.; Mote, T.; Saylor, A.M. Atmospheric circulation patterns, cloud-to-ground lightning, and locally intense convective rainfall associated with debris flow initiation in the Dolomite Alps of northeastern Italy. Nat. Hazards Earth Syst. Sci. 2016, 16, 509–528. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.C.; Jan, C.D.; Huang, W.S. Characteristics of rainfall triggering of debris flows in the Chenyulan watershed, Taiwan. Nat. Hazards Earth Syst. Sci. 2013, 13, 1015–1023. [Google Scholar] [CrossRef]
- Floris, M.; D’Alpaos, A.; Squarzoni, C.; Genevois, R.; Marani, M. Recent changes in rainfall characteristics and their influence on thresholds for debris flow triggering in the Dolomitic area of Cortina d’Ampezzo, north-eastern Italian Alps. Nat. Hazards Earth Syst. Sci. 2010, 10, 571–580. [Google Scholar] [CrossRef]
- Gregoretti, C.; Fontana, G.D. The triggering of debris flow due to channel-bed failure in some alpine headwater basins of the Dolomites: Analyses of critical runoff. Hydrol. Process. 2008, 22, 2248–2263. [Google Scholar] [CrossRef]
- Lari, S.; Crosta, G.B.; Frattini, P.; Horton, P.; Jaboyedoff, M. Regional-scale debris flow risk assessment for an alpine valley. In Proceedings of the 5th International Conference on Debris-Flow Hazards Mitigation: Mechanics, Prediction, and Assessment, Padua, Italy, 14–17 June 2011; pp. 933–940. [Google Scholar]
- Jamaludin, S.; Abdullah, C.H.; Kasim, N. Rainfall Intensity and Duration for Debris Flow Triggering in Peninsular Malaysia. In The Simulation of a Deep Large-Scale Landslide Near Aratozawa Dam Using a 3.0 MPa Undrained Dynamic Loading Ring Shear Apparatus; Springer: Berlin, Germnay, 2014; pp. 1–6. [Google Scholar]
- Abdul Rahman, H. An Overview of Environmental Disaster in Malaysia and Preparedness Strategies. Iran. J. Publ. Health 2014, 43, 17–24. [Google Scholar]
- Abdul, H.; Mapjabil, J. Landslides Disaster in Malaysia: An Overview. Health Environ. J. 2017, 8, 58–71. [Google Scholar]
- Youssef, A.M.; Al-Kathery, M.; Pradhan, B.; El-Sahly, T. Debris flow impact assessment along the Al-Raith Road, Kingdom of Saudi Arabia, using remote sensing data and field investigations. Geomat. Nat. Hazards Risk 2016, 7, 620–638. [Google Scholar] [CrossRef]
- Elkadiri, R.; Sultan, M.; Youssef, Y.M.; Elbayoumi, T.; Chase, R.; Bulkhi, A.B.; Al-Katheeri, M.M. A Remote Sensing-Based Approach for Debris-Flow Susceptibility Assessment Using Artificial Neural Networks and Logistic Regression Modeling. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 4818–4835. [Google Scholar] [CrossRef]
- Feizizadeh, B.; Aryal, J.; Roodposhti, T.B.M.S. Comparing GIS-based support vector machine kernel functions for landslide susceptibility mapping. Arab. J. Geosci. 2017, 10, 122. [Google Scholar] [CrossRef]
- Scheidl, C.; Rickenmann, D.; Chiari, M. The use of airborne LiDAR data for the analysis of debris flow events in Switzerland. Nat. Hazards Earth Syst. Sci. 2008, 8, 1113–1127. [Google Scholar] [CrossRef] [Green Version]
- Bull, J.M.; Miller, H.; Gravley, D.M.; Costello, D.; Hikuroa, D.C.H.; Dix, J.K. Assessing debris flows using LIDAR differencing: 18 May 2005 Matata event, New Zealand. Geomorphology 2010, 124, 75–84. [Google Scholar] [CrossRef] [Green Version]
- Chen, W.; Pourghasemi, H.R.; Naghibi, S.A. Prioritization of landslide conditioning factors and its spatial modeling in Shangnan County, China using GIS-based data mining algorithms. Bull. Eng. Geol. Environ. 2018, 77, 611–629. [Google Scholar] [CrossRef]
- Sookhan, S.; Eyles, N.; Putkinen, N. LiDAR-based volume assessment of the origin of the Wadena drumlin field, Minnesota, USA. Sediment. Geol. 2015, 338, 72–83. [Google Scholar] [CrossRef]
- Neugirg, F.; Kaiser, A.; Huber, A.; Heckmann, T.; Schindewolf, M.; Schmidt, J.; Becht, M.; Haas, F. Using terrestrial LiDAR data to analyse morphodynamics on steep unvegetated slopes driven by different geomorphic processes. Catena 2016, 142, 269–280. [Google Scholar] [CrossRef]
- Bhardwaj, A.; Sam, L.; Bhardwaj, A.; Martín-Torres, F.J. LiDAR remote sensing of the cryosphere: Present applications and future prospects. Remote Sens. Environ. 2016, 177, 125–143. [Google Scholar] [CrossRef]
- Blasone, G.; Cavalli, M.; Marchi, L.; Cazorzi, F. Monitoring sediment source areas in a debris-flow catchment using terrestrial laser scanning. Catena 2014, 123, 23–36. [Google Scholar] [CrossRef]
- Pradhan, B.; Lee, S. Regional landslide susceptibility analysis using back-propagation neural network model at Cameron Highland, Malaysia. Landslides 2010, 7, 13–30. [Google Scholar] [CrossRef]
- Pradhan, B.; Sezer, E.A.; Gokceoglu, C.; Buchroithner, M.F. Landslide susceptibility mapping by neuro-fuzzy approach in a landslide-prone area (Cameron Highlands, Malaysia). IEEE Trans. Geosci. Remote Sens. 2010, 48, 4164–4177. [Google Scholar] [CrossRef]
- Bui, D.T.; Tuan, T.A.; Klempe, H.; Pradhan, B.; Revhaug, I. Spatial prediction models for shallow landslide hazards: A comparative assessment of the efficacy of support vector machines, artificial neural networks, kernel logistic regression, and logistic model tree. Landslides 2016, 13, 361–378. [Google Scholar]
- Pradhan, B.; Jebur, M.N.; Zulhaidi, H.; Shafri, M.; Tehrany, M.S. Data Fusion Technique Using Wavelet Transform and Taguchi Methods for Automatic Landslide Detection from Airborne Laser Scanning Data and QuickBird Satellite Imagery. IEEE Trans. Geosci. Remote Sens. 2016, 54, 1610–1622. [Google Scholar] [CrossRef]
- Mojaddadi, H.; Pradhan, B.; Nampak, H.; Ahmad, N.; Ghazali, A.H.B. Ensemble machine-learning-based geospatial approach for flood risk assessment using multi-sensor remote-sensing data and GIS. Geom. Nat. Hazards Risk 2017, 8, 1080–1102. [Google Scholar] [CrossRef] [Green Version]
- Kalantar, B.; Pradhan, B.; Naghibi, S.A.; Motevalli, A.; Mansor, S. Assessment of the effects of training data selection on the landslide susceptibility mapping: A comparison between support vector machine (SVM), logistic regression (LR) and artificial neural networks (ANN). Geom. Nat. Hazards Risk 2018, 5705, 1–21. [Google Scholar] [CrossRef]
- Saez, J.L.; Corona, C.; Stoffel, M.; Gotteland, A.; Berger, F.; Liébault, F. Debris-flow activity in abandoned channels of the Manival torrent reconstructed with LiDAR and tree-ring data. Nat. Hazards Earth Syst. Sci. 2011, 11, 1247–1257. [Google Scholar] [CrossRef] [Green Version]
- Yusoff, H.H.M.; Razak, K.A. Different Methods of Landslide Mapping in Cameron Highlands. Malays. J. Remote Sens. GIS 2015, 4, 85–91. [Google Scholar]
- Pradhan, B.; Bahareh, K.; Waleed, M.A.; Bui, T.D. Debris Flow Susceptibility Assessment Using Airborne Laser Scanning Data. In Laser Scanning Applications in Landslide Assesement; Pradhan, B., Ed.; Springer: Berlin, Germany, 2017; pp. 85–113. [Google Scholar]
- Gregoretti, C.; Degetto, M.; Boreggio, M. GIS-based cell model for simulating debris flow runout on a fan. J. Hydrol. 2016, 534, 326–340. [Google Scholar] [CrossRef]
- Gregoretti, C.; Stancanelli, L.M.; Bernard, M.; Boreggio, M.; Degetto, M.; Lanzoni, S. Relevance of erosion processes when modelling in-channel gravel debris flows for efficient hazard assessment. J. Hydrol. 2019, 568, 575–591. [Google Scholar] [CrossRef]
- Zhang, W.; Qing, J.C.; Yuke, W. Susceptibility analysis of large-scale debris flows based on combination weighting and extension methods. Nat. Hazards 2013, 66, 1073–1100. [Google Scholar] [CrossRef]
- Naranjo, J.L.; van Westen, C.J.; Soeters, R. Evaluating the use of training areas in bivariate statistical landslide hazard analysis: A case study in Colombia. ITC J. 1994, 3, 292–300. [Google Scholar]
- Ayalew, L.; Yamagishi, H. The application of GIS-based logistic regression for landslide susceptibility mapping in the Kakuda-Yahiko Mountains, Central Japan. Geomorphology 2005, 65, 15–31. [Google Scholar] [CrossRef]
- Sezer, E.A.; Pradhan, B.; Gokceoglu, C. Manifestation of an adaptive neuro-fuzzy model on landslide susceptibility mapping: Klang valley, Malaysia. Expert Syst. Appl. 2011, 38, 8208–8219. [Google Scholar] [CrossRef]
- Pfeifer, N.; Briese, C. Laser scanning—Principles and applications. In Proceedings of the GeoSiberia 2007—International Exhibition and Scientific Congress, Novosibirsk, Russia, 19–21 April 2017; pp. 1–20. [Google Scholar]
- Lawrence, R. GPHY 429R Applied Remote Sensing, Lecture Note: LiDAR and Debris Flow Analysis; Montana State University: Bozeman, MT, USA, 2016. [Google Scholar]
- Heritage, G.L.; Large, A.R.G. Laser Scanning for the Environmental Sciences; Wiley-Blackwell: Hoboken, NJ, USA, 2009. [Google Scholar]
- Van Genderen, J.L. Airborne and Terrestrial Laser Scanning; CRC Press: Boca Raton, FL, USA, 2011. [Google Scholar]
- Hetherington, D. Topographic Laser Ranging and Scanning: Principles and Processing; CRC Press: Boca Raton, FL, USA, 2010. [Google Scholar]
- Polat, N.; Uysal, M.; Toprak, A.S. An investigation of DEM generation process based on LiDAR data filtering, decimation, and interpolation methods for an urban area. Measurement 2015, 75, 50–56. [Google Scholar] [CrossRef]
- Slatton, K.C.; Carter, W.E.; Shrestha, R.L.; Dietrich, W. Airborne Laser Swath Mapping: Achieving the Resolution and Accuracy Required for Geosurficial Research. Geophys. Res. Lett. 2007, 34, 1–5. [Google Scholar] [CrossRef]
- Chen, W.; Li, X.; Wang, Y.; Chen, G.; Liu, S. Forested landslide detection using LiDAR data and the random forest algorithm: A case study of the Three Gorges, China. Remote Sens. Environ. 2014, 152, 291–301. [Google Scholar] [CrossRef]
- Jaboyedoff, M.; Oppikofer, T.; Abellán, A.; Derron, M.H.; Loye, A.; Metzger, R.; Pedrazzini, A. Use of LiDAR in landslide investigations: A review. Nat. Hazards 2012, 61, 5–28. [Google Scholar] [CrossRef]
- Mathias, J. Debris-Flow Hazards and Related Phenomena; Jakob, M., Hungr, O., Eds.; Springer: Berlin, Germany, 2005; pp. 411–432. [Google Scholar]
- Tobergte, D.R.; Curtis, S. Laser scanning for the environmental Sciences. J. Chem. Inf. Model. 2013, 53, 1689–1699. [Google Scholar]
- Babcock, C.; Finley, A.O.; Cook, B.D.; Weiskittel, A.; Woodall, C.W. Modeling forest biomass and growth: Coupling long-term inventory and LiDAR data. Remote Sens. Environ. 2016, 182, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Minár, J.; Evans, I.S. Elementary forms for land surface segmentation: The theoretical basis of terrain analysis and geomorphological mapping. Geomorphology 2008, 95, 236–259. [Google Scholar] [CrossRef]
- Cavalli, M.; Tarolli, P.; Marchi, L.; Fontana, G.D. The effectiveness of airborne LiDAR data in the recognition of channel-bed morphology. Catena 2008, 73, 249–260. [Google Scholar] [CrossRef]
- Cavalli, M.; Marchi, L. Characterisation of the surface morphology of an alpine alluvial fan using airborne LiDAR. Nat. Hazards Earth Syst. Sci. 2008, 8, 323–333. [Google Scholar] [CrossRef]
- Tehrany, M.S.; Jones, S.; Shabani, F. Identifying the essential flood conditioning factors for flood prone area mapping using machine learning techniques. Catena 2019, 175, 174–192. [Google Scholar] [CrossRef]
- Hong, H.; Liu, J.; Zhu, A.X.; Shahabi, H.; Pham, B.P.; Chen, W.; Pradhan, B.; Bui, D.T. A novel hybrid integration model using support vector machines and random subspace for weather-triggered landslide susceptibility assessment in the Wuning area (China). Environ. Earth Sci. 2017, 76, 652. [Google Scholar] [CrossRef]
- Shirzadi, A.; Tien, D.; Binh, B.; Pham, T.; Solaimani, K. Shallow landslide susceptibility assessment using a novel hybrid intelligence approach. Environ. Earth Sci. 2017, 76, 1–18. [Google Scholar] [CrossRef]
- Rahmati, O.; Tahmasebipour, N.; Haghizadeh, A.; Pourghasemi, H.R.; Feizizadeh, B. Evaluation of different machine learning models for predicting and mapping the susceptibility of gully erosion. Geomorphology 2017, 298, 118–137. [Google Scholar] [CrossRef]
- Chen, W.; Pourghasemi, H.R.; Panahi, M.; Kornejady, A.; Wang, J.; Xie, X.; Cao, S. Spatial prediction of landslide susceptibility using an adaptive neuro-fuzzy inference system combined with frequency ratio, generalized additive model, and support vector machine techniques. Geomorphology 2017, 297, 69–85. [Google Scholar] [CrossRef]
- Leathwick, J.R.; Elith, J.; Hastie, T. Comparative performance of generalized additive models and multivariate adaptive regression splines for statistical modelling of species distributions. Ecol. Modell. 2006, 199, 188–196. [Google Scholar] [CrossRef]
- Alavi, A.H.; Gandomi, A.H.; Lary, D.J. Progress of machine learning in geosciences: Preface. Geosci. Front. 2016, 7, 1–2. [Google Scholar] [CrossRef] [Green Version]
- Carrara, A.; Cardinali, M.; Guzzetti, F.; Reichenbach, P. GIS Technology in Mapping Landslide Hazard. In Geographical Information Systems in Assessing Natural Hazards; Springer: Berlin, Germany, 1995; pp. 135–175. [Google Scholar]
- Garosi, Y.; Sheklabadi, M.; Pourghasemi, H.R.; Besalatpour, A.A.; Conoscenti, C.; van Oost, K. Comparison of differences in resolution and sources of controlling factors for gully erosion susceptibility mapping. Geoderma 2018, 330, 65–78. [Google Scholar] [CrossRef]
- Conoscenti, C.; Angileri, S.; Cappadonia, C.; Rotigliano, E.; Agnesi, V.; Märker, M. Gully erosion susceptibility assessment by means of GIS-based logistic regression: A case of Sicily (Italy). Geomorphology 2014, 204, 399–411. [Google Scholar] [CrossRef] [Green Version]
- Conoscenti, C.; Angileri, S.E.; Rotigliano, E.; Schnabel, S. Using topographical attributes to evaluate gully erosion proneness (susceptibility) in two mediterranean basins: Advantages and limitations. Nat. Hazards 2015, 79, 291–314. [Google Scholar]
- Gutiérrez, Á.G.; Contador, F.L.; Schnabel, S. Modeling Soil Properties at a Regional Scale Using GIS and Multivariate Adaptive Regression Splines. Available online: http://geomorphometry.org/system/file/GomezGutierrez2011bgeomorphometry.pdf. (accessed on 26 May 2019).
- Paudel, U.; Oguchi, T.; Hayakawa, Y. Multi-Resolution Landslide Susceptibility Analysis Using a DEM and Random Forest. Int. J. Geosci. 2016, 7, 726–743. [Google Scholar] [CrossRef] [Green Version]
- Zabihi, M.; Pourghasemi, H.R.; Pourtaghi, Z.S.; Behzadfar, M. GIS-based multivariate adaptive regression spline and random forest models for groundwater potential mapping in Iran. Environ. Earth Sci. 2016, 75, 665. [Google Scholar] [CrossRef]
- Liu, K.; Ding, H.; Tang, G.; Song, C.; Liu, Y.; Jiang, L.; Zhao, B.; Gao, Y.; Ma, R. Large-scale mapping of gully-affected areas: An approach integrating Google Earth images and terrain skeleton information. Geomorphology 2018, 314, 13–26. [Google Scholar] [CrossRef]
- Lary, D.J.; Alavi, A.H.; Gandomi, A.H.; Walker, A.L. Machine learning in geosciences and remote sensing. Geosci. Front. 2016, 7, 3–10. [Google Scholar] [CrossRef] [Green Version]
- Nefeslioglu, H.A.; Gokceoglu, C.; Sonmez, H. An assessment on the use of logistic regression and artificial neural networks with different sampling strategies for the preparation of landslide susceptibility maps. Eng. Geol. 2008, 97, 171–191. [Google Scholar] [CrossRef]
- Ahn, B.S.; Cho, S.S.; Kim, C.Y. Integrated methodology of rough set theory and artificial neural network for business failure prediction. Expert Syst. Appl. 2000, 18, 65–74. [Google Scholar] [CrossRef]
- Choi, J.; Oh, H.J.; Lee, H.J.; Lee, C.; Lee, S. Combining landslide susceptibility maps obtained from frequency ratio, logistic regression, and artificial neural network models using ASTER images and GIS. Eng. Geol. 2012, 124, 12–23. [Google Scholar] [CrossRef]
- Panja, P.; Velasco, R.; Pathak, M.; Deo, M. Application of artificial intelligence to forecast hydrocarbon production from shales. Mater. Today Commun. 2018, 4, 75–89. [Google Scholar] [CrossRef]
- Chen, W.; Pourghasemi, H.R.; Zhao, Z. A GIS-based comparative study of Dempster-Shafer, logistic regression and artificial neural network models for landslide susceptibility mapping. Geocarto Int. 2017, 32, 367–385. [Google Scholar] [CrossRef]
- Bui, D.T.; Pradhan, B.; Nampak, H.; Bui, Q.T.; Tran, Q.A.; Nguyen, Q.P. Hybrid artificial intelligence approach based on neural fuzzy inference model and metaheuristic optimization for flood susceptibilitgy modeling in a high-frequency tropical cyclone area using GIS. J. Hydrol. 2016, 540, 317–330. [Google Scholar]
- Chen, W.; Reza, H.; Seyed, P.; Naghibi, A. A comparative study of landslide susceptibility maps produced using support vector machine with different kernel functions and entropy data mining models in China. Bull. Eng. Geol. Environ. 2018, 77, 647–664. [Google Scholar] [CrossRef]
- Lohani, A.K.; Goel, N.K.; Bhatia, K.K.S. Improving real time flood forecasting using fuzzy inference system. J. Hydrol. 2014, 509, 25–41. [Google Scholar] [CrossRef]
- Xu, C.; Xu, X.; Dai, F.; Saraf, A.K. Comparison of different models for susceptibility mapping of earthquake triggered landslides related with the 2008 Wenchuan earthquake in China. Comput. Geosci. 2012, 46, 317–329. [Google Scholar] [CrossRef]
- Ma, Y.; Guo, G. Support Vector Machines Applications; Springer: Berlin, Germany, 2014; pp. 1–302. ISBN 9783319023. [Google Scholar]
- Chen, W.; Ma, C.; Ma, L. Mining the customer credit using hybrid support vector machine technique. Expert Syst. Appl. 2009, 36, 7611–7616. [Google Scholar] [CrossRef]
- Termeh, S.V.R.; Kornejady, A.; Pourghasemi, H.R.; Keesstra, S. Flood susceptibility mapping using novel ensembles of adaptive neuro fuzzy inference system and metaheuristic algorithms. Sci. Total Environ. 2018, 615, 438–451. [Google Scholar] [CrossRef]
- Pradhan, B. A comparative study on the predictive ability of the decision tree, support vector machine and neuro-fuzzy models in landslide susceptibility mapping using GIS. Comput. Geosci. 2013, 51, 350–365. [Google Scholar] [CrossRef]
- Hamadeh, N.; Karouni, A.; Daya, B. Predicting Forest Fire Hazards Using Data Mining Techniques: Decision Tree and Neural Networks. Adv. Mater. Res. 2014, 1051, 466–470. [Google Scholar] [CrossRef]
- Bui, D.T.; Panahi, M.; Shahabi, H.; Singh, V.P.; Shirzadi, A.; Chapi, K.; Khosravi, K.; Chen, W.; Panahi, S.; Li, S.; et al. Novel Hybrid Evolutionary Algorithms for Spatial Prediction of Floods. Sci. Rep. 2018, 8, 15364. [Google Scholar] [CrossRef]
- Rodriguez-Galiano, V.; Sanchez-Castillo, M.; Chica-Rivas, M. Machine learning predictive models for mineral prospectivity: An evaluation of neural networks, random forest, regression trees and support vector machines. Ore Geol. Rev. 2015, 71, 804–818. [Google Scholar] [CrossRef]
- Wu, J.; Chen, G.Q.; Zheng, L.; Zhang, Y.B. GIS-based numerical modelling of debris flow motion across three-dimensional terrain. J. Mt. Sci. 2013, 10, 522–531. [Google Scholar] [CrossRef] [Green Version]
- Yalcin, A. GIS-based landslide susceptibility mapping using analytical hierarchy process and bivariate statistics in Ardesen (Turkey): Comparisons of results and confirmations. Catena 2008, 72, 1–12. [Google Scholar] [CrossRef]
- Shi, M.; Chen, J.; Sun, D.; Zhang, X. Assessing debris flow susceptibility in mountainous area of Beijing, China using a combination weighting and an improved fuzzy C-means algorithm. Chem. Eng. Trans. 2015, 46, 697–702. [Google Scholar]
- Chen, X.; Chen, H.; You, Y.; Liu, J. Susceptibility assessment of debris flows using the analytic hierarchy process method—A case study in Subao river valley, China. J. Rock Mech. Geotech. Eng. 2015, 7, 404–410. [Google Scholar] [CrossRef]
- Pradhan, B.; Abu-Bakar, S.B. Debris Flow Source Identification in Tropical Dense Forest Using Airborne Laser Scanning Data and Flow-R Model. In Laser Scanning Applications in Landslide Assessment; Pradhan, B., Ed.; Springer: Basel, Switzerland, 2017; pp. 1–359. [Google Scholar]
- Fischer, L.; Rubensdotter, L.; Sletten, K.; Stalsberg, K.; Horton, P.; Jaboyedoff, M. Debris flow modeling for susceptibility mapping at regional to national scale in Norway. In Proceedings of the 11th International and 2nd North American Symposium on Landslides, Banff, AB, Canada, 3–8 June 2012; pp. 723–729. [Google Scholar]
- Horton, P.; Jaboyedoff, M.; Rudaz, B.; Zimmermann, M. Flow-R, a model for susceptibility mapping of debris flows and other gravitational hazards at a regional scale. Nat. Hazards Earth Syst. Sci. 2013, 13, 869–885. [Google Scholar] [CrossRef] [Green Version]
- de Andrés, J.; Lorca, P.; Juez, F.J.D.; Sánchez-Lasheras, F. Bankruptcy forecasting: A hybrid approach using fuzzy c-means clustering and multivariate adaptive regression splines (MARS). Expert Syst. Appl. 2011, 38, 1866–1875. [Google Scholar] [CrossRef]
- Lee, S.; Talib, J.A. Probabilistic landslide susceptibility and factor effect analysis. Environ. Geol. 2005, 47, 982–990. [Google Scholar] [CrossRef]
- Kim, G.; Yune, C.Y.; Paik, J.; Lee, S.W. Analysis of debris flow behavior using airborne LiDAR and image data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 85–88. [Google Scholar] [CrossRef]
- Park, D.W.; Lee, S.R.; Vasu, N.N.; Kang, S.H.; Park, J.Y. Coupled model for simulation of landslides and debris flows at local scale. Nat. Hazards 2016, 81, 1653–1682. [Google Scholar] [CrossRef]
- Zhang, W.G.; Goh, A.T.C. Multivariate adaptive regression splines for analysis of geotechnical engineering systems. Comput. Geotech. 2013, 48, 82–95. [Google Scholar] [CrossRef]
- Crino, S.; Brown, D.E. Global optimization with multivariate adaptive regression splines. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2007, 37, 333–340. [Google Scholar] [CrossRef]
- Park, S.; Hamm, S.; Jeon, H.; Kim, J. Evaluation of Logistic Regression and Multivariate Adaptive Regression Spline Models for Groundwater Potential Mapping Using R and GIS. Sustainability 2017, 9, 1157. [Google Scholar] [CrossRef]
- Deo, R.C.; Kisi, O.; Singh, V.P. Drought forecasting in eastern Australia using multivariate adaptive regression spline, least square support vector machine and M5Tree model. Atmos. Res. 2017, 184, 149–175. [Google Scholar] [CrossRef]
- Conoscenti, C.; Ciaccio, M.; Caraballo-arias, N.A.; Gómez-gutiérrez, Á.; Rotigliano, E.; Agnesi, V. Geomorphology Assessment of susceptibility to earth-flow landslide using logistic regression and multivariate adaptive regression splines: A case of the Belice River basin (western Sicily, Italy). Geomorphology 2015, 242, 49–64. [Google Scholar] [CrossRef]
- Roy, S.S.; Roy, R.; Balas, V.E. Estimating heating load in buildings using multivariate adaptive regression splines, extreme learning machine, a hybrid model of MARS and ELM. Renew. Sustain. Energy Rev. 2018, 82, 4256–4268. [Google Scholar]
- Gutiérrez, Á.G.; Schnabel, S.; Contador, J.F.L. Using and comparing two nonparametric methods (CART and MARS) to model the potential distribution of gullies. Ecol. Model. 2009, 220, 3630–3637. [Google Scholar] [CrossRef]
- Kisi, O.; Parmar, K.S. Application of least square support vector machine and multivariate adaptive regression spline models in long term prediction of river water pollution. J. Hydrol. 2016, 534, 104–112. [Google Scholar] [CrossRef]
- Zhang, W.; Goh, A.T.C.; Zhang, Y. Multivariate Adaptive Regression Splines Application for Multivariate Geotechnical Problems with Big Data. Geotech. Geol. Eng. 2016, 34, 193–204. [Google Scholar] [CrossRef]
- Zhang, W.; Goh, A.T.C. Multivariate adaptive regression splines and neural network models for prediction of pile drivability. Geosci. Front. 2016, 7, 45–52. [Google Scholar] [CrossRef] [Green Version]
- Zhang, W.; Zhang, Y.; Goh, A.T.C. Multivariate adaptive regression splines for inverse analysis of soil and wall properties in braced excavation. Tunn. Undergr. Sp. Technol. 2017, 64, 24–33. [Google Scholar] [CrossRef]
- Id, S.; Count, W. Geomorphometric Analysis of Landform Pattern Using Topographic Position and ASTER GDEM by Jibrin Gambo. In Proceedings of the Global Civil Engineering Conference, Kuala Lumpur, Malaysia, 25–28 July 2017. [Google Scholar]
- Nouwakpo, S.K.; Weltz, M.A.; Green, C.H.M.; Arslan, A. Combining 3D data and traditional soil erosion assessment techniques to study the effect of a vegetation cover gradient on hillslope runoff and soil erosion in a semi-arid catchment. Catena 2018, 170, 129–140. [Google Scholar] [CrossRef]
- Vianello, A.; Cavalli, M.; Tarolli, P. LiDAR-derived slopes for headwater channel network analysis. Catena 2009, 76, 97–106. [Google Scholar] [CrossRef]
- Bater, C.W.; Coops, N.C. Evaluating error associated with lidar-derived DEM interpolation. Comput. Geosci. 2009, 35, 289–300. [Google Scholar] [CrossRef]
- Hengl, T. Finding the right pixel size. Comput. Geosci. 2006, 32, 1283–1298. [Google Scholar] [CrossRef]
- Kienzle, S. The Effect of DEM Raster Resolution on First Order, Second Order and Compound Terrain Derivatives. Trans. GIS 2004, 8, 83–111. [Google Scholar] [CrossRef]
- Hill, R.A.; Hinsley, S.A. Airborne lidar for woodland habitat quality monitoring: Exploring the significance of lidar data characteristics when modelling organism-habitat relationships. Remote Sens. 2015, 7, 3446–3466. [Google Scholar] [CrossRef]
- Hengl, T. A Practical Guide to Geostatistical Mapping; Open Access: Hague, The Netherlands, 2009. [Google Scholar]
- Keijsers, J.G.S.; Schoorl, J.M.; Chang, K.T.; Chiang, S.H.; Claessens, L.; Veldkamp, A. Calibration and resolution effects on model performance for predicting shallow landslide locations in Taiwan. Geomorphology 2011, 133, 168–177. [Google Scholar] [CrossRef]
- Fangqiang, W.; Yu, Z.; Kaiheng, H.; Kechang, G. Model and method of debris flow risk zoning based on momentum analysis. Wuhan Univ. J. Nat. Sci. 2006, 11, 835–839. [Google Scholar] [CrossRef]
- Jain, I.; Kumar, V.; Jain, R. Correlation feature selection based improved-Binary Particle Swarm Optimization for gene selection and cancer classification. Appl. Soft Comput. J. 2018, 62, 203–215. [Google Scholar] [CrossRef]
- Zabihi, M.; Mirchooli, F.; Motevalli, A.; Darvishan, A.K.; Pourghasemi, H.R.; Zakeri, M.A.; Sadighi, F. Spatial modelling of gully erosion in Mazandaran Province, northern Iran. Catena 2018, 161, 1–13. [Google Scholar] [CrossRef]
- Staley, D.M.; Wasklewicz, T.A.; Blaszczynski, J.S. Surficial patterns of debris flow deposition on alluvial fans in Death Valley, CA using airborne laser swath mapping data. Geomorphology 2006, 74, 152–163. [Google Scholar] [CrossRef]
- Federico, F.; Cesali, C. An energy-based approach to predict debris flow mobility and analyze empirical relationships. Can. Geotech. J. 2015, 52, 2113–2133. [Google Scholar] [CrossRef] [Green Version]
- Pradhan, A.M.S.; Kang, H.-S.; Lee, S.; Kim, Y.-T. Spatial model integration for shallow landslide susceptibility and its runout using a GIS-based approach in Yongin, Korea. Geocarto Int. 2016, 6049, 1–55. [Google Scholar] [CrossRef]
- Casas, A.; Riaño, D.; Greenberg, J.; Ustin, S. Assessing levee stability with geometric parameters derived from airborne LiDAR. Remote Sens. Environ. 2012, 117, 281–288. [Google Scholar] [CrossRef]
- Conway, S.J.; Decaulne, A.; Balme, M.R.; Murray, J.B.; Towner, M.C. A new approach to estimating hazard posed by debris flows in the Westfjords of Iceland. Geomorphology 2010, 114, 556–572. [Google Scholar] [CrossRef] [Green Version]
- Pradhan, B.; Chaudhari, A.; Adinarayana, J.; Buchroithner, M.F. Soil erosion assessment and its correlation with landslide events using remote sensing data and GIS: A case study at Penang Island, Malaysia. Environ. Monit. Assess. 2012, 184, 715–727. [Google Scholar] [CrossRef]
- Kailey, P. Debris Flows in New Zealand Alpine Catchments. Ph.D. Thesis, University of Canterbury, Christchurch, New Zealand, February 2013. [Google Scholar]
- Frey, H.; Huggel, C.; Bühler, Y.; Buis, D.; Burga, M.D.; Choquevilca, W.; Fernandez, F.; Hernández, J.G.; Giráldez, C.; Loarte, E.; et al. A robust debris-flow and GLOF risk management strategy for a data-scarce catchment in Santa Teresa, Peru. Landslides 2016, 13, 1493–1507. [Google Scholar] [CrossRef] [Green Version]
- Wei, F.; Gao, K.; Cui, P.; Hu, K.; Xu, J.; Zhang, G.; Bi, B. Method of debris flow prediction based on a numerical weather forecast and its application. Monit. Simul. Prev. Remediat. Dense Debris Flows 2006, 1, 37–46. [Google Scholar]
- Lancaster, S.T.; Nolin, A.W.; Copeland, E.A.; Grant, G.E. Periglacial debris-flow initiation and susceptibility and glacier recession from imagery, airborne LiDAR, and ground-based mapping. Geosphere 2012, 8, 417–430. [Google Scholar] [CrossRef]
- Rickenmann, D. Debris-Flow Hazard Assessment and Methods Applied in Engineering Practice. Int. J. Eros. Control Eng. 2016, 9, 80–90. [Google Scholar] [CrossRef] [Green Version]
- Blais-Stevens, A.; Behnia, P. Debris flow susceptibility mapping using a qualitative heuristic method and Flow-R along the Yukon Alaska Highway Corridor, Canada. Nat. Hazards Earth Syst. Sci. 2016, 16, 449–462. [Google Scholar] [CrossRef] [Green Version]
- Sodnik, J.; Podobnikar, T.; Petje, U.; Mikoš, M. Topographic Data and Numerical Debris-Flow Modeling. In Landslide Science and Practice; Springer: Berlin, Germany, 2011. [Google Scholar]
- Zhang, G.; Cai, Y.; Zheng, Z.; Zhen, J.; Liu, Y.; Huang, K. Integration of the Statistical Index Method and the Analytic Hierarchy Process technique for the assessment of landslide susceptibility in Huizhou, China. Catena 2016, 142, 233–244. [Google Scholar] [CrossRef]
- Burrough, P.A.; McDonnell, R.A.; Lloyd, C. Principles of Geographical Information Systems, 3rd ed.; Oxford University Press: Oxford, UK, 2008. [Google Scholar]
- Horn, B.K.P. Hill Shading and the Reflectance Map. Proc. IEEE 1981, 69, 14–47. [Google Scholar] [CrossRef]
- Scheidl, C.; Rickenmann, D. Comparison of different simulation models to estimate the runout of alpine debris flows. In EGU General Assembly Conference Abstracts; EGU: München, Germany, 2009; Volume 11, p. 6989. [Google Scholar]
- Rickenmann, D.; Zimmermann, M. The 1987 debris flows in Switzerland: Documentation and analysis. Geomorphology 1993, 8, 175–189. [Google Scholar] [CrossRef]
- Takahashi, T. Debris flow. Ann. Rev. Fluid Mech. 1981, 13, 57–77. [Google Scholar] [CrossRef]
- Morino, C.; Conway, S.J.; Balme, M.R.; Jordan, C.; Hillier, J.; Argles, T. The comparison between two airborne LiDAR datasets to analyse debris flow initiation in north-western Iceland. In EGU General Assembly Conference Abstracts; EGU: München, Germany, 2015; Volume 17, p. 11628. [Google Scholar]
- Brayshaw, D.; Hassan, M.A. Debris flow initiation and sediment recharge in gullies. Geomorphology 2009, 109, 122–131. [Google Scholar] [CrossRef]
- Chen, C.Y.; Wang, Q. Debris flow-induced topographic changes: Effects of recurrent debris flow initiation. Environ. Monit. Assess. 2017, 189, 449. [Google Scholar] [CrossRef]
- Boswarva, K.; Butters, A.; Fox, C.J.; Howe, J.A.; Narayanaswamy, B. Improving marine habitat mapping using high-resolution acoustic data; a predictive habitat map for the Firth of Lorn, Scotland. Cont. Shelf Res. 2018, 168, 39–47. [Google Scholar] [CrossRef]
- Satari, S.Z.; Zubairu, Y.Z.; Hussin, S.F.H.A.G. Some Statistical Characteristic of Malaysian Wind Direction Recorded at Maximum Wind Speed: 1999–2008. Sains Malays. 2015, 44, 1521–1530. [Google Scholar] [CrossRef]
- Gasing, F.A. Evaluation of Wind Hazard over Sabah and Sarawak. Ph.D. Thesis, University of Malaysia Pahang, Pahang, Malaysia, 2015. [Google Scholar]
- Lay, U.S.; Jibrin, G.; Tijani, I.; Pradhan, B. Geomorphometric Analysis of Landform Pattern Using Topographic Position and ASTER GDEM. In Lecture Notes in Civil Engineering; Pradhan, B., Ed.; Springer: Singapore, Singapore, 2019; pp. 1139–1160. [Google Scholar]
- Weiss, A.D. Topographic Position and Landforms Analysis, The Nature Conservancy. Poster Present. ESRI User Conf. 2001, 64, 227–245. [Google Scholar]
- Blaszczynski, J.S. Landform characterization with geographic information systems. Photogramm. Eng. Remote Sens. 1997, 63, 183–191. [Google Scholar]
- Qin, C.Z.; Zhu, A.-X.; Pei, T.; Li, B.-L.; Scholten, T.; Behrens, T.; Zhou, C.-H. An approach to computing topographic wetness index based on maximum downslope gradient. Precis. Agric. 2011, 12, 32–43. [Google Scholar] [CrossRef]
- Chen, C.-Y.; Yu, F.-C. Morphometric analysis of debris flows and their source areas using GIS. Geomorphology 2011, 129, 387–397. [Google Scholar] [CrossRef]
- Horton, P.; Jaboyedoff, M.; Zimmermann, M.; Mazotti, B.; Longchamp, C. Flow-R, a model for debris flow susceptibility mapping at a regional scale—Some case studies. Ital. J. Eng. Geol. 2011, 2, 875–884. [Google Scholar]
- Akgün, A.; Türk, N. Mapping erosion susceptibility by a multivariate statistical method: A case study from the Ayvalik region, NW Turkey. Comput. Geosci. 2011, 37, 1515–1524. [Google Scholar] [CrossRef]
- Dashwood, C. Creating a Debris Flow Susceptibility Model for Great Britain: A GIS Based Approach. In Proceedings of the BGS Science Festival 2017, Nottingham, UK, 7–8 December 2017; p. 2017. [Google Scholar]
- Hall, M.A.; Smith, L.A. Practical Feature Subset Selection for Machine Learning. In Proceedings of the 21st Australasian Computer Science Conference (ACSC’98), Perth, Australia, 4–6 February 1998. [Google Scholar]
- Song, Q.; Ni, J.; Wang, G. A Fast Clustering-Based Feature Subset Selection Algorithm for High-Dimensional Data. IEEE Trans. Knowl. Data Eng. 2013, 25, 1–14. [Google Scholar] [CrossRef]
- Friedman, J.H. Multivariate adaptive regression spline. Ann. Stat. 1991, 19, 1–67. [Google Scholar] [CrossRef]
- Haleem, K.; Gan, A.; Lu, J. Using multivariate adaptive regression splines (MARS) to develop crash modification factors for urban freeway interchange influence areas. Accid. Anal. Prev. 2013, 55, 12–21. [Google Scholar] [CrossRef]
- Samui, P.; Kothari, D.P. A multivariate adaptive regression spline approach for predcition of maximum shear modulus (G max) and minimum damping ratio (ζ min). Eng. J. 2012, 16, 69–77. [Google Scholar] [CrossRef]
- Sekulic, S.; Kowalski, B.R. Mars: A Tutorial. J. Chemom. 1992, 6, 199–216. [Google Scholar] [CrossRef]
- Dey, P.; Das, A.K. Application of Multivariate Adaptive Regression Spline-Assisted Objective Function on Optimization of Heat Transfer Rate Around a Cylinder. Nucl. Eng. Technol. 2016, 48, 1315–1320. [Google Scholar] [CrossRef] [Green Version]
- Friedman, J.H.; Roosen, C.B. An Introduction to Multivariate Adaptive Regression Splines. Ann. Stat. 1995, 19, 1–67. [Google Scholar] [CrossRef]
- Cortes, C.; Vapnik, V. Support-Vector Networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Suárez Sánchez, A.; Nieto, P.J.G.; Fernández, P.R.; der Díaz, J.J.; Iglesias-Rodríguez, F.J. Application of an SVM-based regression model to the air quality study at local scale in the Avilés urban area (Spain). Math. Comput. Model. 2011, 54, 1453–1466. [Google Scholar] [CrossRef]
- Safavi, H.R.; Esmikhani, M. Conjunctive Use of Surface Water and Groundwater: Application of Support Vector Machines (SVMs) and Genetic Algorithms. Water Resour. Manag. 2013, 27, 2623–2644. [Google Scholar] [CrossRef]
- Ying, Y.; Jin, W.; Yu, H.; Yu, B.; Shan, J.; Lv, S. Development of particle swarm optimization—Support vector regression (PSO–SVR ) coupled with microwave plasma torch—Atomic emission spectrometry for quality control of ginsengs. J. Chemom. 2017, 31, e2862. [Google Scholar] [CrossRef]
- Al-Yaseen, W.L.; Othman, Z.A.; Nazri, M.Z.A. Multi-level hybrid support vector machine and extreme learning machine based on modified K-means for intrusion detection system. Expert Syst. Appl. 2017, 67, 296–303. [Google Scholar] [CrossRef]
- Chang, C.-C.; Lin, C.-J. Libsvm: A library for support vector machines. ACM Trans. Intell. Syst. Technol. 2011, 2, 1–27. [Google Scholar] [CrossRef]
- Vapnik, V.N. The Nature of Statistic Learning Theory, 2nd ed.; Springer: Berlin/Heidelberg, Germay, 2000. [Google Scholar]
- Liu, Y.; Zheng, Y.F. FS_SFS: A novel feature selection method for support vector machines. Pattern Recognit. 2006, 39, 1333–1345. [Google Scholar] [CrossRef]
- Vakhshoori, V.; Zare, M. Is the ROC curve a reliable tool to compare the validity of landslide susceptibility maps? Geom. Nat. Hazards Risk 2018, 9, 249–266. [Google Scholar] [CrossRef] [Green Version]
- Gao, W.; Hu, L.; Zhang, P.; Wang, F. Feature selection by integrating two groups of feature evaluation criteria. Expert Syst. Appl. 2018, 110, 11–19. [Google Scholar] [CrossRef]
- Fong, S.; Gao, E.; Wong, R. Optimized Swarm Search-Based Feature Selection for Text Mining in Sentiment Analysis. In Proceedings of the 2015 IEEE International Conference on Data Mining Workshop (ICDMW), Atlantic City, NJ, USA, 14–17 November 2015; pp. 1153–1162. [Google Scholar]
- Yesilnacar, E.; Topal, T. Landslide susceptibility mapping: A comparison of logistic regression and neural networks methods in a medium scale study, Hendek region (Turkey). Eng. Geol. 2005, 79, 251–266. [Google Scholar] [CrossRef]
- Jin, Q.; Chi, M.; Zhang, Y.; Wang, H.; Zhang, H.; Cai, W. A novel bacterial algorithm for parameter optimization of Support Vector Machine. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 3252–3257. [Google Scholar]
- Medina, V.; Hurlimann, M.; Bateman, A. Application of FLATModel, a 2D finite volume code, to debris flows in the northeastern part of the Iberian Peninsula. Landslides 2008, 5, 127–142. [Google Scholar] [CrossRef]
- Iwahashi, J.; Pike, R.J. Automated classifications of topography from DEMs by an unsupervised nested-means algorithm and a three-part geometric signature. Geomorphology 2007, 86, 409–440. [Google Scholar] [CrossRef]
- Baumann, P.H.V.; Jaboyedoff, M. Debris flow susceptibility mapping at a regional scale. In Proceedings of the 4th Canadian Conference on Geohazards: From Causes to Management, Quebec City, QC, Canada, 20–24 May 2011; pp. 399–406. [Google Scholar]
- Delmonaco, G.; Leoni, G.; Margottini, C.; Puglisi, C.; Spizzichino, D. Large scale debris-flow hazard assessment: A geotechnical approach and GIS modelling. Nat. Hazards Earth Syst. Sci. 2003, 3, 443–455. [Google Scholar] [CrossRef]
- Moore, I.D.; Gessler, P.E.; Nielsen, G.A.; Peterson, G.A. Soil Attribute Prediction Using Terrain Analysis. Soil Sci. Am. J. 1993, 57, 443–452. [Google Scholar] [CrossRef]
- Catani, F.; Farina, P.; Moretti, S.; Nico, G.; Strozzi, T. On the application of SAR interferometry to geomorphological studies: Estimation of landform attributes and mass movements. Geomorphology 2005, 66, 119–131. [Google Scholar] [CrossRef]
- Wang, L.J.; Guo, M.; Sawada, K.; Lin, J.; Zhang, J. Landslide susceptibility mapping in Mizunami City, Japan: A comparison between logistic regression, bivariate statistical analysis and multivariate adaptive regression spline models. Catena 2015, 135, 271–282. [Google Scholar] [CrossRef]
- Fannin, R.J.; Wise, M.P. An empirical-statistical model for debris flow travel distance. Can. Geotech. J. 2001, 38, 982–994. [Google Scholar] [CrossRef]
- Stancanelli, L.M.; Foti, E. A comparative assessment of two different debris flow propagation approaches-blind simulations on a real debris flow event. Nat. Hazards Earth Syst. Sci. 2015, 15, 735–746. [Google Scholar] [CrossRef]
- Zweig, M.H.; Campbell, G. Receiver-operating characteristic (ROC) plots: A fundamental evaluation tool in clinical medicine. Clin. Chem. 1993, 39, 561–577. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S/N | Variable | Information Value (IV) | Cramer’s V | Gini Coefficient | Important Score |
|---|---|---|---|---|---|
| 1. | Slope Aspect | 0.40 | 0.30 | 0.23 | 100 |
| 2. | Profile Curvature | 0.28 | 0.26 | 0.07 | 97.41 |
| 3. | Total curvature | 0.80 | 0.41 | 0.17 | 86.82 |
| 4. | Slope angle | 0.62 | 0.37 | 0.06 | 84.46 |
| 5. | Plan curvature | 0.57 | 0.36 | 0.15 | 77.66 |
| 6. | TWI | 0.88 | 0.44 | 0.02 | 56.71 |
| 7. | STI | 0.48 | 0.32 | 0.03 | 56.56 |
| 8. | TRI | 0.68 | 0.47 | 0.06 | 0.00 |
| 9. | Elevation | 0.61 | 0.36 | 0.33 | 0.00 |
| 10. | RSPI | 0.94 | 0.45 | 0.03 | 0.00 |
| 11. | SCA | 0.52 | 0.34 | 0.00 | 0.00 |
| 12. | TPI | 0.49 | 0.30 | 0.01 | 0.00 |
| No. | Relationship |
|---|---|
| 1. | BF3 = max (0, CURV_TRF − 0.868835) × BF1; |
| 2. | BF14 = max (0, CURV_TRF − 0.567935); |
| 3. | BF27 = max (0, 0.852459 − TWI_TRF) × BF1; |
| 4. | BF28 = max (0, ASPECT_TRF − 0.539546) × BF15; |
| 5. | BF30 = max (0, STI_TRF − 0.5587) × BF24; |
| 6. | BF40 = max (0, PROFCUV_TRF − 0.36921) × BF6; |
| 7. | BF53 = max (0, PL_TRF − 0) × BF24; |
| 8. | BF108 = max (0, STI_TRF − 0) × BF15; |
| 9. | BF120 = max (0, CURV_TRF − 0) × BF18; |
| 10. | BF136 = max (0, CURV_TRF − 0.554817); |
| 11. | BF138 = max (0, CURV_TRF − 0.582064); |
| 12. | BF140 = max (0, ASPECT_TRF − 2.98023 × 10−8) × BF139; |
| 13. | BF146 = max (0, 0.977528 − SLOP_TRF) × BF138; |
| 14. | BF147 = max (0, PROFCUV_TRF − 0.188011) × BF24; |
| 15. | BF171 = max (0, STI_TRF − 0.0797712) |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lay, U.S.; Pradhan, B.; Yusoff, Z.B.M.; Abdallah, A.F.B.; Aryal, J.; Park, H.-J. Data Mining and Statistical Approaches in Debris-Flow Susceptibility Modelling Using Airborne LiDAR Data. Sensors 2019, 19, 3451. https://doi.org/10.3390/s19163451
Lay US, Pradhan B, Yusoff ZBM, Abdallah AFB, Aryal J, Park H-J. Data Mining and Statistical Approaches in Debris-Flow Susceptibility Modelling Using Airborne LiDAR Data. Sensors. 2019; 19(16):3451. https://doi.org/10.3390/s19163451
Chicago/Turabian StyleLay, Usman Salihu, Biswajeet Pradhan, Zainuddin Bin Md Yusoff, Ahmad Fikri Bin Abdallah, Jagannath Aryal, and Hyuck-Jin Park. 2019. "Data Mining and Statistical Approaches in Debris-Flow Susceptibility Modelling Using Airborne LiDAR Data" Sensors 19, no. 16: 3451. https://doi.org/10.3390/s19163451
APA StyleLay, U. S., Pradhan, B., Yusoff, Z. B. M., Abdallah, A. F. B., Aryal, J., & Park, H. -J. (2019). Data Mining and Statistical Approaches in Debris-Flow Susceptibility Modelling Using Airborne LiDAR Data. Sensors, 19(16), 3451. https://doi.org/10.3390/s19163451