A Further Exploration of Multi-Slot Based Spectrum Sensing


Abstract
:1. Introduction
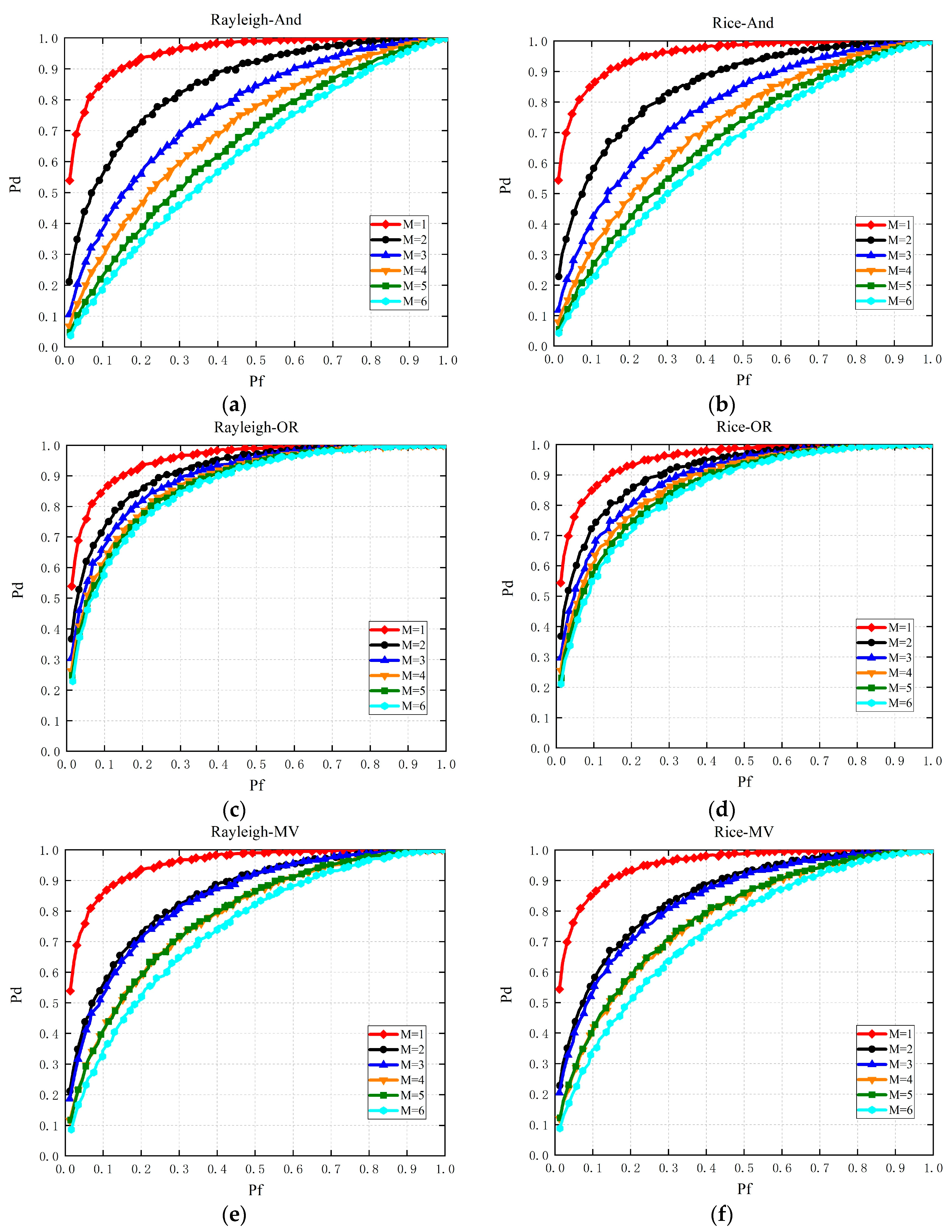
- SS with one slot outperforms those with multiple slots if decision fusion rule is considered for multi-slot based SS.
- Multi-slot based SS is conducive to the performance improvement of SS when instantaneous strong noise occurs in the radio environment.
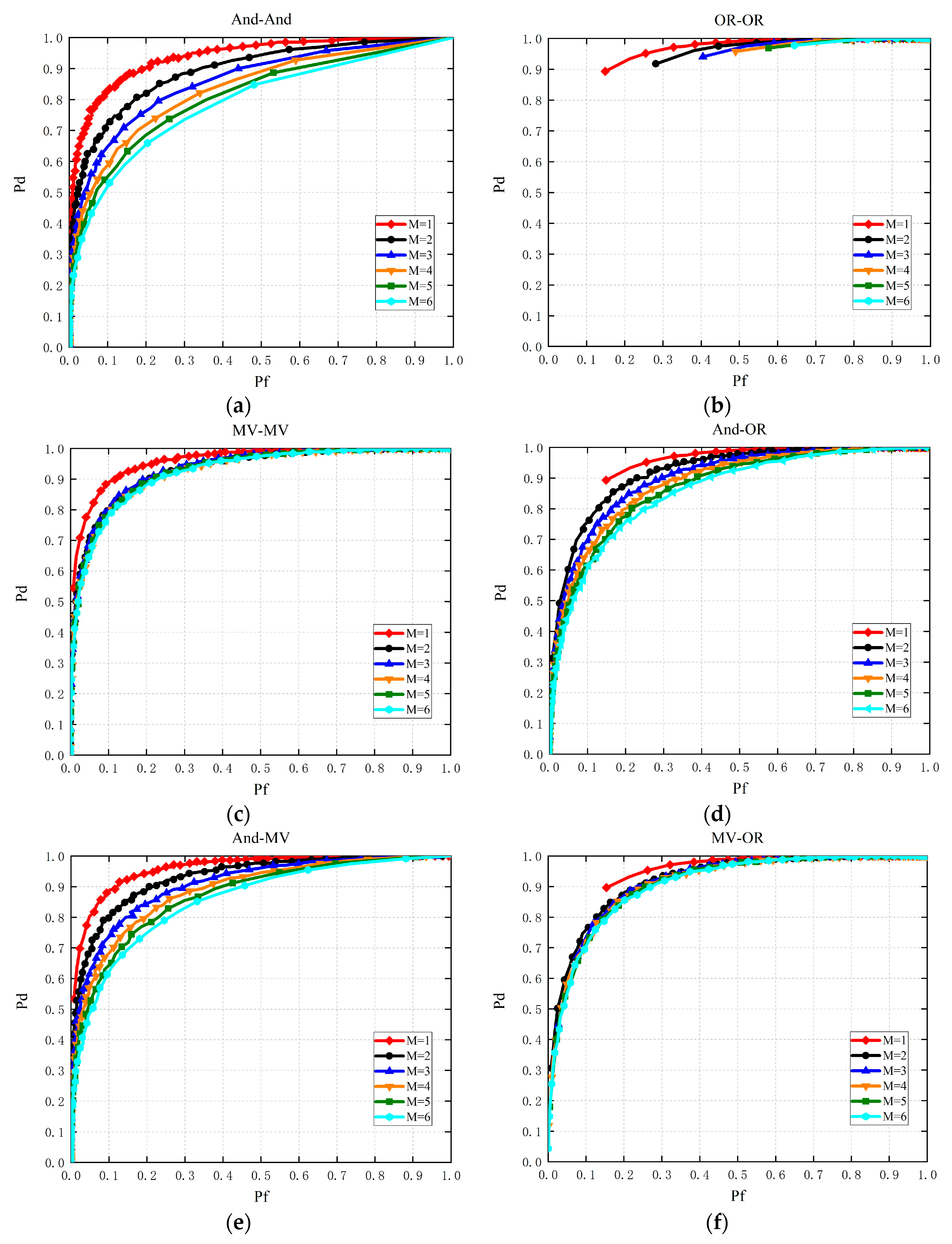
- For multi-slot based CSS, majority voting rule among multiple nodes obtains the optimal sensing performance.
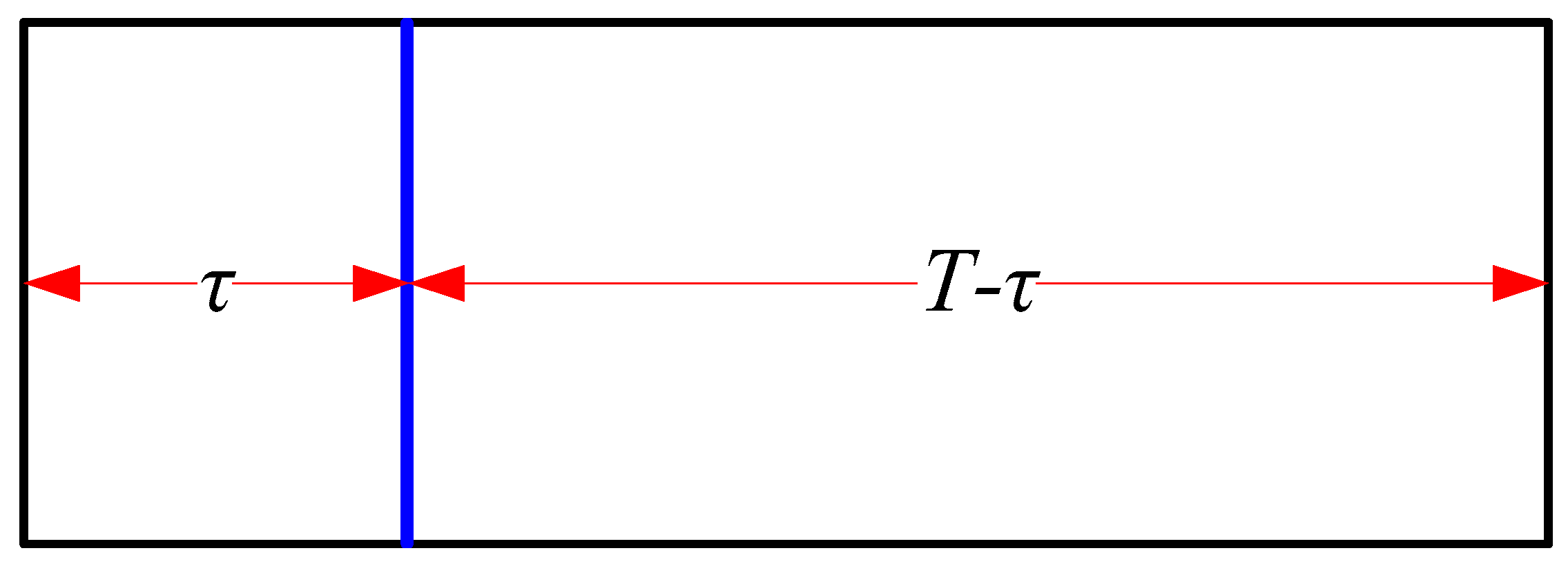
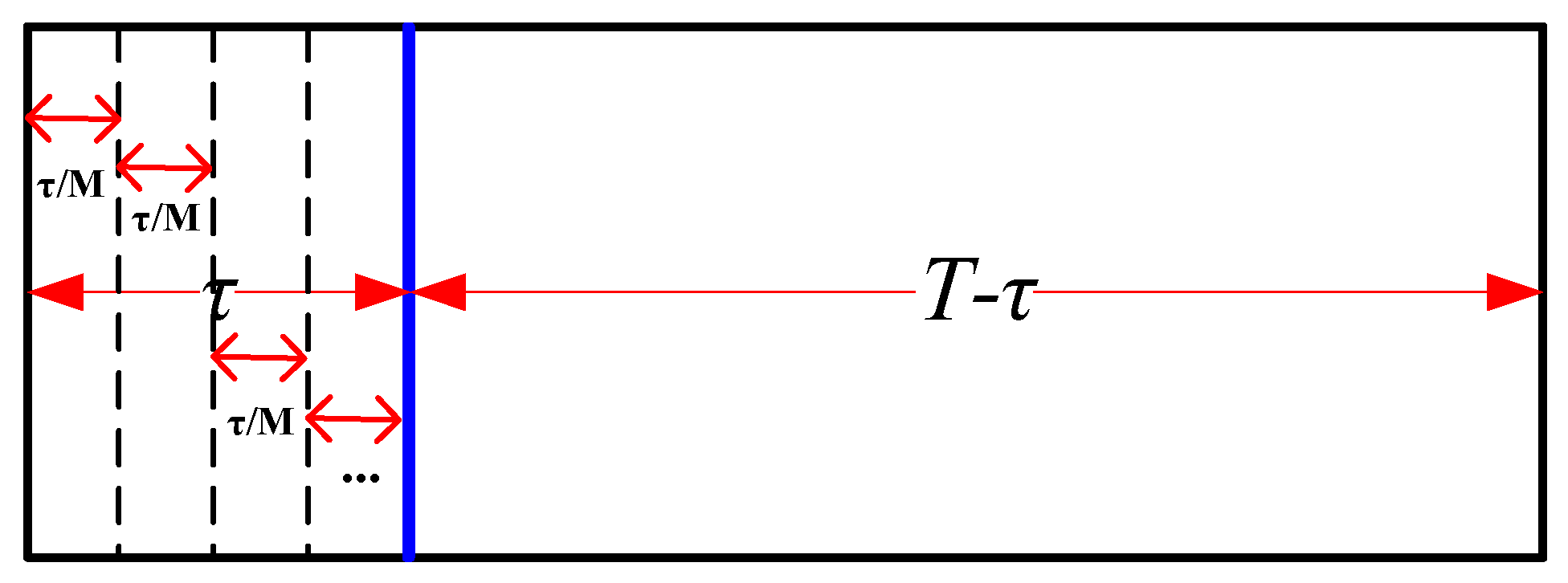
2. System Model
3. Multi-Slot SS
3.1. Multi-Slot SS with Single Node
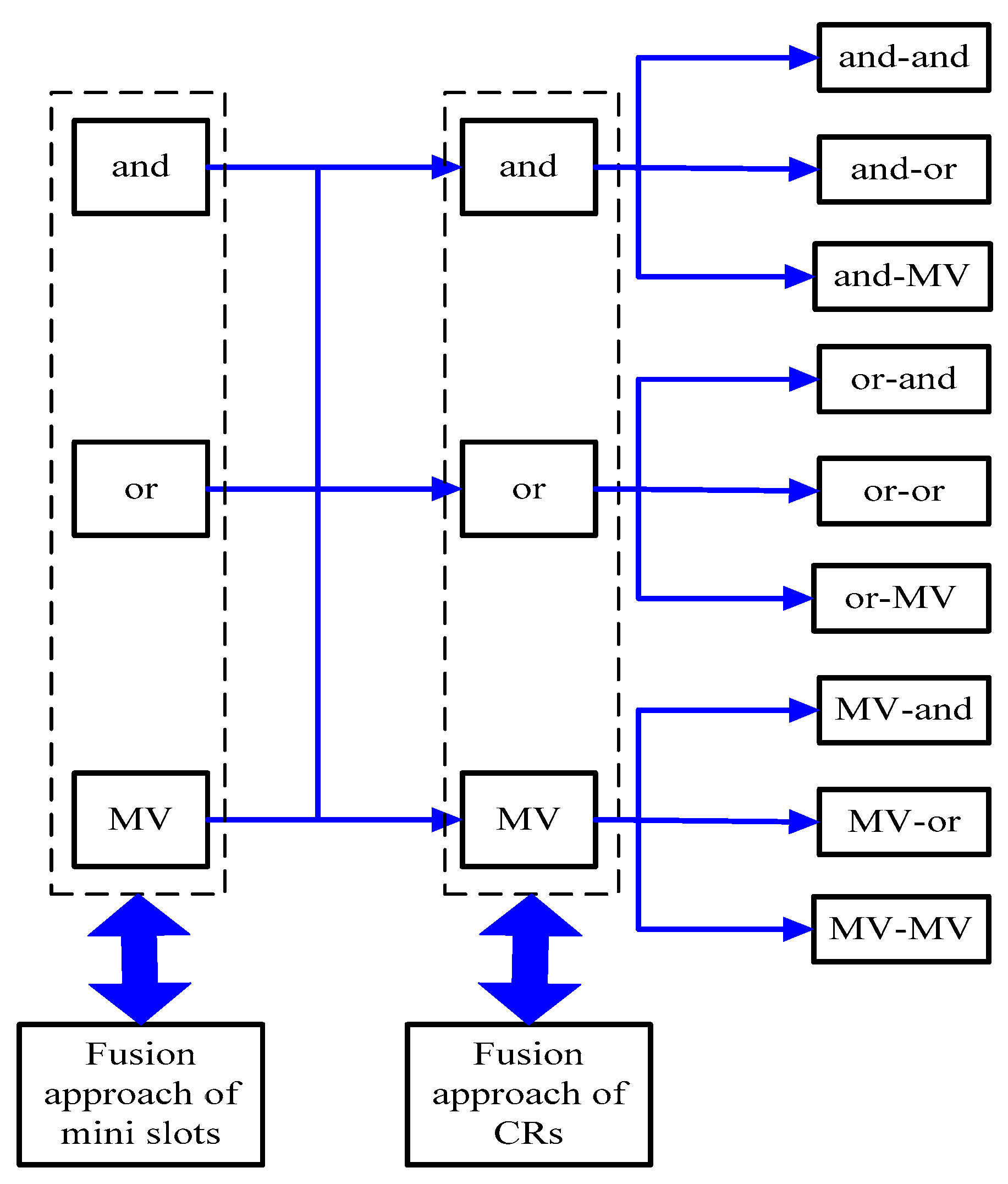
3.2. Multi-Slot Based CSS
3.3. Instantaneous Strong Noise
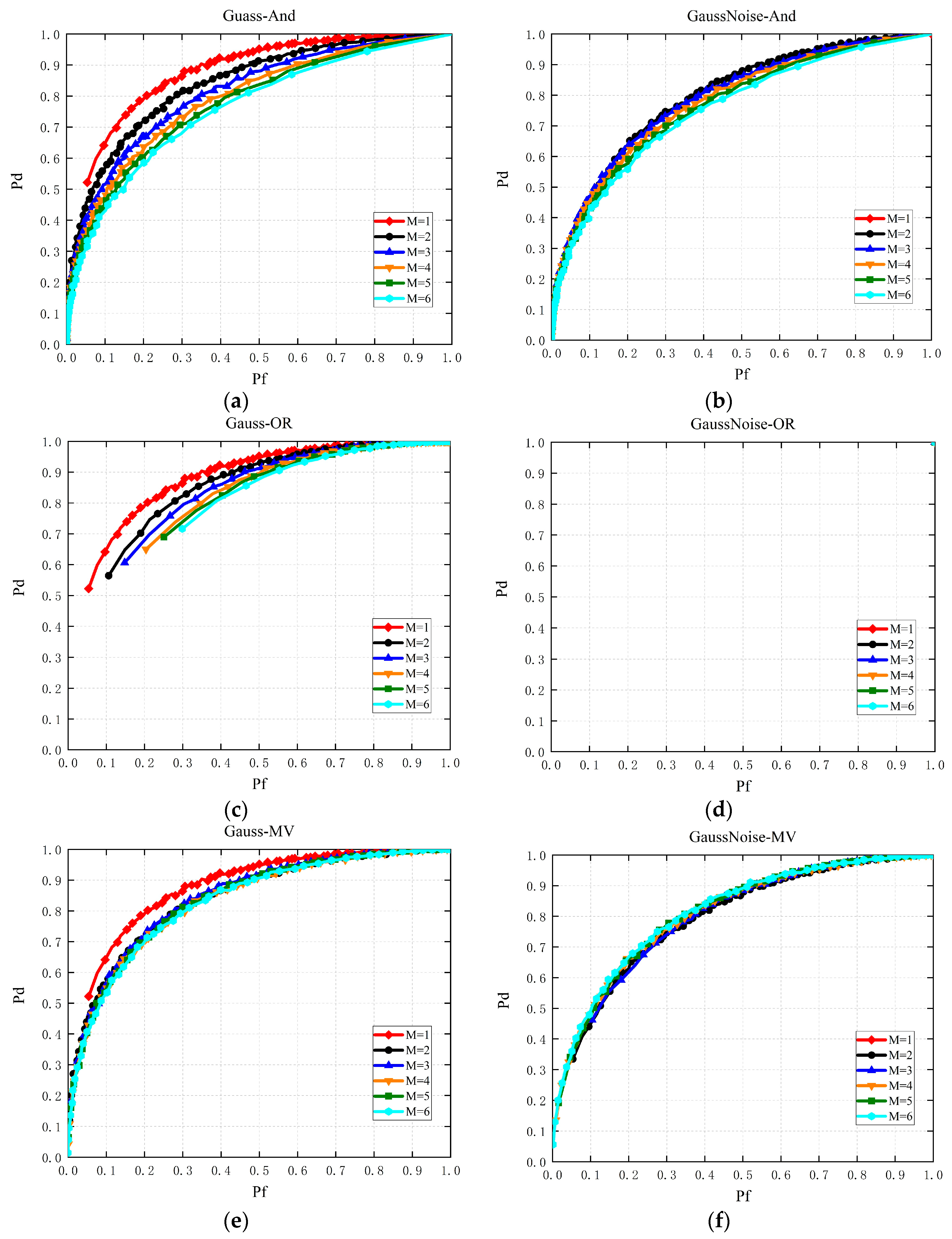
4. Simulations and Analysis
4.1. Multi-Slot SS with Single Node
4.2. Multi-Slot Based CSS
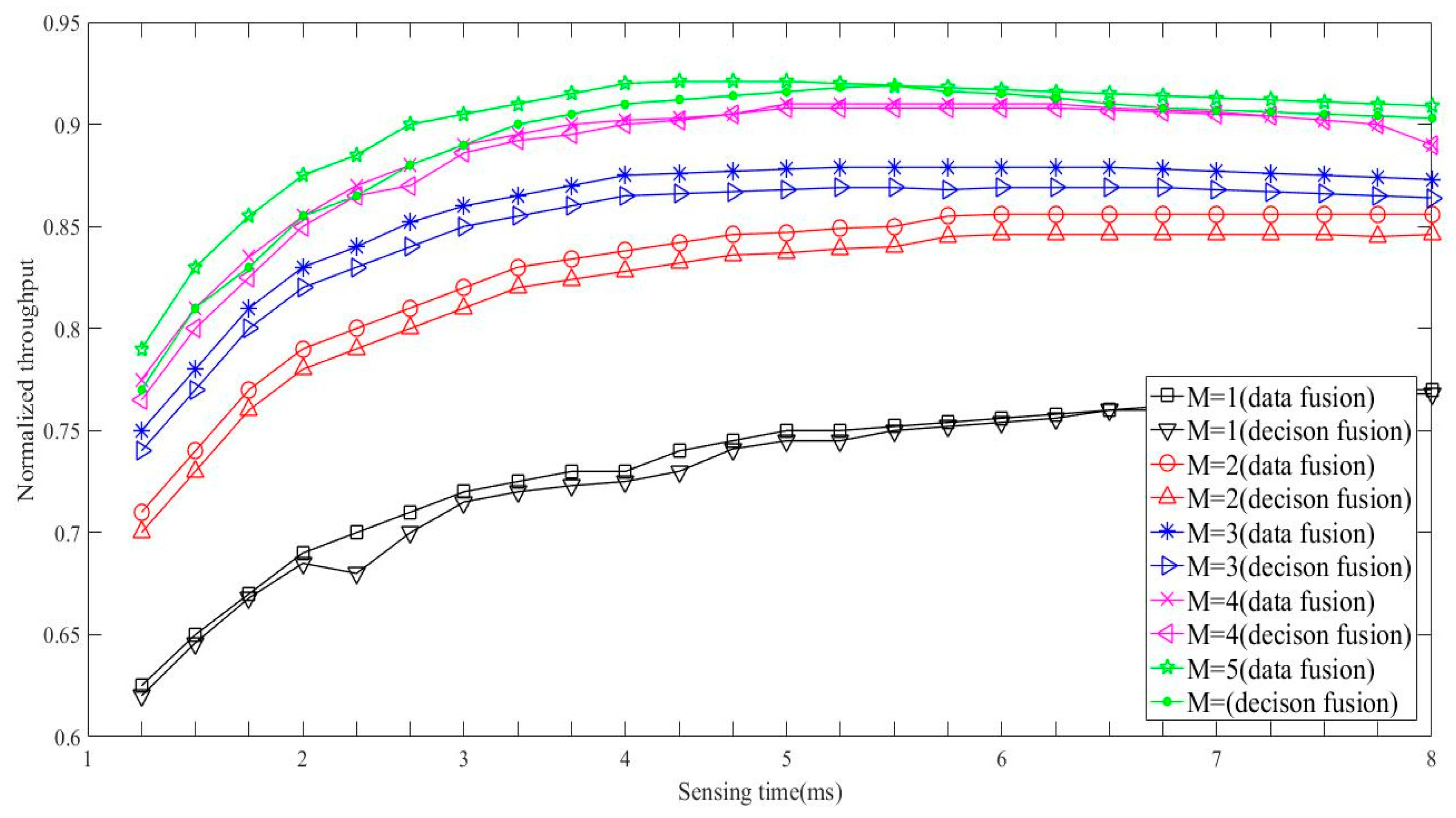
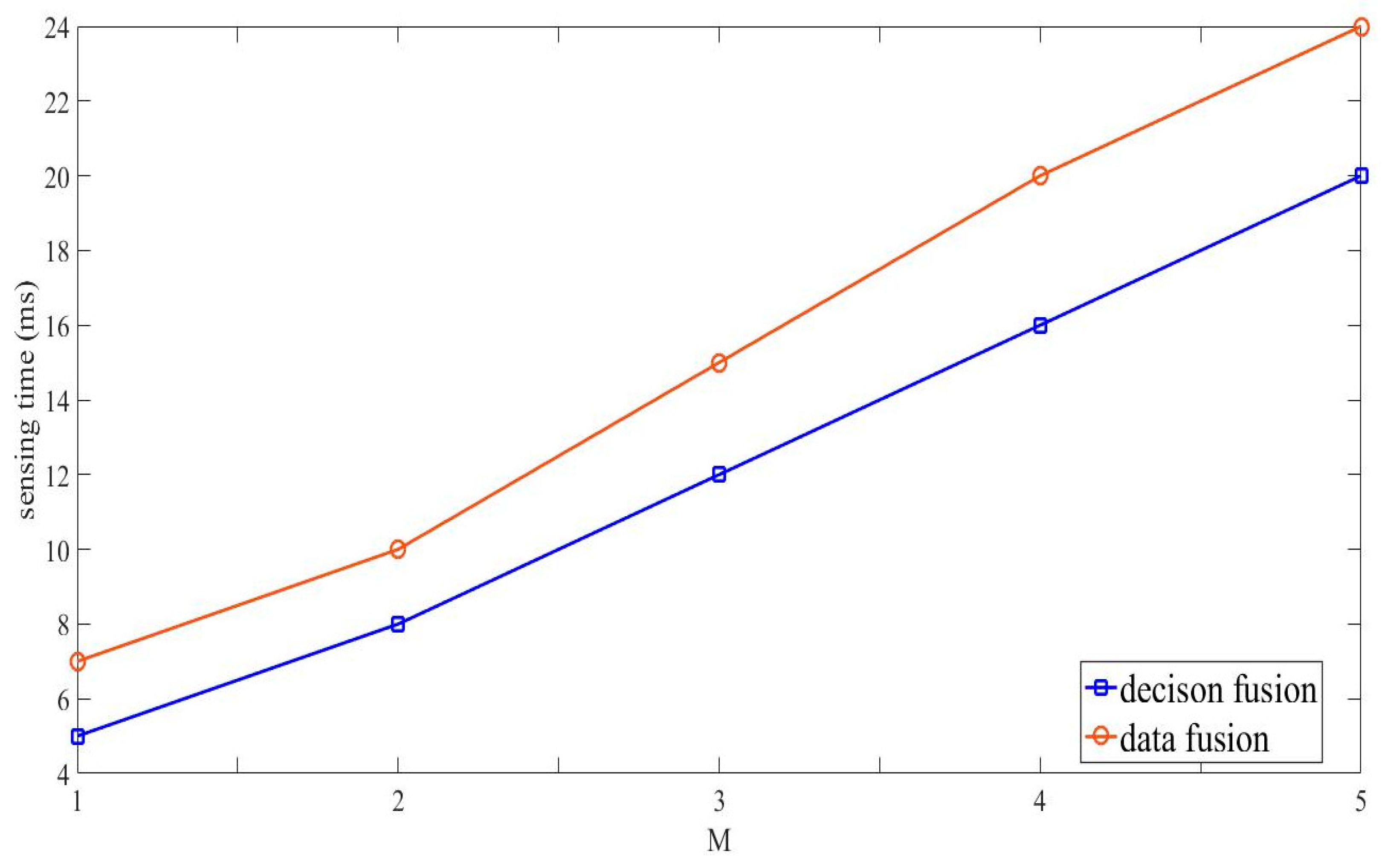
4.3. Performance Comparison with Data Fusion Based Multi-Slot SS
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
Appendix B
Appendix C
Appendix D
Appendix E
References
- Akyildiz, I.F.; Lee, W.-Y.; Vuran, M.C.; Mohanty, S. NeXt generation/dynamic spectrum access/cognitive radio wireless networks: A survey. Comput. Netw. 2006, 50, 2127–2159. [Google Scholar] [CrossRef]
- McHenry, M.A. NSF Spectrum Occupancy Measurements Projects Summary; Shared Spectrum Company Report; Shared Spectrum Company: Vienna, VA, USA, 2005. [Google Scholar]
- Federal Communications Commission Spectrum Policy Task Force. Available online: http://www.fcc.gov/sptf/files/SEWGFinalReport_1.pdf (accessed on 9 August 2019).
- Haykin, S. Cognitive radio: Brain Empowered Wireless Communications. IEEE J. Selet. Area Commun. 2005, 23, 201–220. [Google Scholar] [CrossRef]
- Arjoune, Y.; Kaabouch, N. A Comprehensive Survey on Spectrum Sensing in Cognitive Radio Networks: Recent Advances, New Challenges, and Future Research Directions. Sensors 2019, 19, 126. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Gladisch, A.; Pickavet, M.; Tao, Z.; Mohr, W. Energy efficiency in communications. IEEE Commun. Mag. 2010, 48, 48–49. [Google Scholar] [CrossRef]
- Yawada, P.S.; Wei, A.J. Cyclostationary Detection Based on Non-cooperative spectrum sensing in cognitive radio network. In Proceedings of the International Conference on Cyber Technology in Automation, Control, and Intelligent Systems, Chengdu, China, 19–22 June 2016; pp. 184–187. [Google Scholar]
- Salahdine, F.; El Ghazi, H.; Kaabouch, N.; Fihri, W.F. Matched filter detection with dynamic threshold for cognitive radio networks. In Proceedings of the International Conference on Wireless Networks and Mobile Communications, Marrakech, Morocco, 20–23 October 2015; pp. 1–6. [Google Scholar]
- Kumar, K.S.; Saravanan, R.; Muthaiah, R. Cognitive Radio Spectrum Sensing Algorithms based on Eigenvalue and Covariance methods. Int. J. Eng. Technol. 2013, 5, 595–601. [Google Scholar]
- Guangming, N. Byzantine Defense in Collaborative Spectrum Sensing Via Bayesian Learning. IEEE Access 2017, 5, 20089–20098. [Google Scholar]
- Hillenbrand, J.; Weiss, T.A.; Jondral, F. Calculation of detection and false alarm probabilities in spectrum pooling systems. IEEE Commun. Lett. 2005, 9, 349–351. [Google Scholar] [CrossRef]
- Ghasemi, A.; Sousa, E.S. Optimization of spectrum sensing for opportunistic spectrum access in cognitive radio networks. In Proceedings of the 4th IEEE Consumer Communications Networking Conference (CCNC), Las Vegas, NV, USA, 11–13 January 2007; pp. 1022–1026. [Google Scholar]
- Zhang, W.; Mallik, R.; Letaief, K. Optimization of cooperative spectrum sensing with energy detection in cognitive radio networks. IEEE Trans. Wirel. Commun. 2009, 8, 5761–5766. [Google Scholar] [CrossRef]
- Stevenson, C.R. Functional Requirements for the 802.22 WRAN Standard. Available online: https://mentor.ieee.org/802.22/dcn/05/22-05-0007-46-0000-draft-wran-rqmts-doc.doc (accessed on 9 August 2019).
- Liang, Y.C.; Zeng, Y.; Peh, E.; Hoang, A.T. Sensing-Throughput Tradeoff for Cognitive Radio Networks. IEEE Trans. Wirel. Commun. 2008, 7, 5330–5335. [Google Scholar]
- Liu, X.; Li, F.; Na, Z. Optimal Resource Allocation in Simultaneous Cooperative Spectrum Sensing and Energy Harvesting for Multichannel Cognitive Radio. IEEE Access 2017, 5, 3801–3812. [Google Scholar] [CrossRef]
- Cichon, K.; Kliks, A.; Bogucka, H. Energy-Efficient Cooperative Spectrum Sensing: A Survey. IEEE Commun. Surv. Tutor. 2016, 18, 1861–1886. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, D.; Xue, G.; Tang, J. A Spectrum Auction under Physical Interference Model. IEEE Trans. Cogn. Commun. Netw. 2016, 3, 719–728. [Google Scholar] [CrossRef]
- Wu, F.; Vaidya, N.H. A Strategy-Proof Radio Spectrum Auction Mechanism in Noncooperative Wireless Networks. IEEE Trans. Mob. Comput. 2013, 12, 885–894. [Google Scholar] [CrossRef]
- Jin, H.; Su, L.; Chen, D.; Nahrstedt, K.; Xu, J. Quality of Information Aware Incentive Mechanisms for Mobile Crowd Sensing Systems. In Proceedings of the 16th ACM Symposium on Mobile Ad Hoc Networking and Computing (MobiHoc 2015), Hangzhou, China, 22–25 June 2015. [Google Scholar]
- Mu, J.; Jing, X.; Xie, J.; Zhang, Y.; Xie, J. Multistage spectrum sensing scheme with SNR estimation. IET Commun. 2019, 13, 1148–1154. [Google Scholar] [CrossRef]
- Chaudhari, S.; Lunden, J.; Koivunen, V.; Poor, H.V. Cooperative Sensing with Imperfect Reporting Channels: Hard Decisions or Soft Decisions? IEEE Trans. Signal Process. 2012, 60, 18–28. [Google Scholar] [CrossRef]
- Weiss, T.; Hillenbrand, J.; Jondral, F. A Diversity Approach for the Detection of Idle Spectral Resources in Spectrum Pooling Systems; International Scientific Colloquium: Ilmenau, Germany, 2003. [Google Scholar]
- Visotsky, E.; Kuffner, S.; Peterson, R. On collaborative detection of TV transmissions in support of dynamic spectrum sharing. In Proceedings of the IEEE International Symposium on New Frontiers in Dynamic Spectrum Access Networks, Baltimore, MD, USA, 8–11 November 2005. [Google Scholar]
- Mishra, S.M.; Sahai, A.; Brodersen, R. Cooperative Sensing among Cognitive Radios. In Proceedings of the IEEE ICC, Istanbul, Turkey, 11–15 June 2006. [Google Scholar]
- Althunibat, S.; Palacios, R.; Granelli, F. Performance Optimization of Soft and Hard Spectrum Sensing Schemes in Cognitive Radio. IEEE Commun. Lett. 2012, 16, 998–1001. [Google Scholar] [CrossRef]
- Peh, E.C.Y.; Liang, Y.-C.; Guan, Y.L. Optimization of Cooperative Sensing in Cognitive Radio Networks: A Sensing-Throughput Tradeoff View. IEEE Int. Conf. Commun. 2009, 58, 5294–5299. [Google Scholar]
- Sun, C.; Zhang, W.; Letaief, K.B. Cooperative Spectrum Sensing for Cognitive Radios under. In Proceedings of the IEEE Wireless Communications & Networking Conference, Kowloon, China, 11–15 March 2007. [Google Scholar]
- Qihang, P.; Kun, Z.; Jun, W.; Shaoqian, L. A distributed spectrum sensing scheme based on credibility and evidence theory in cognitive radio context. In Proceedings of the IEEE 17th International Symposium on Personal, Indoor and Mobile Radio Communications, Helsinki, Finland, 11–14 September 2006. [Google Scholar]
- Unnikrishnan, J.; Veeravalli, V.V. Cooperative Sensing for Primary Detection in Cognitive Radio. IEEE J. Sel. Top. Signal Process. 2008, 2, 18–27. [Google Scholar] [CrossRef]
- Nallagonda, S.; Sudheer, S.; Roy, S.D.; Kundu, S. Cooperative spectrum sensing with censoring of cognitive radios and improved energy detector under majority logic fusion. In Proceedings of the IEEE International Conference on Signal Processing, Hong Kong, China, 12–15 August 2012. [Google Scholar]
- Clement, J.C.; Reddy, B.B.; Emmanuel, D.S. An Energy-Efficient Cooperative Spectrum Sensing Strategy with Robustness Against Noise Uncertainty for Cognitive Radio Networks. Arab. J. Sci. Eng. 2016, 41, 3399–3405. [Google Scholar] [CrossRef]
- Chen, D.; Li, J.; Ma, J. Cooperative Spectrum Sensing under Noise Uncertainty in Cognitive Radio. In Proceedings of the International Conference on Wireless Communications, Dalian, China, 12–14 October 2008. [Google Scholar]
- Zhu, L.; Yao, C.; Wang, L. The Optimization of Combination Scheme in Cooperative Spectrum Sensing Based on the Practical Reporting Frame Format. Wirel. Pers. Commun. 2018, 102, 3009–3019. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Performance Rank | Fusion Approach |
|---|---|
| 1 | MV-MV |
| 2 | and-MV, MV-and, or-MV, MV-or, and-or, or-and |
| 3 | and-and, or-or |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, J.; Cao, H.; Mu, J. A Further Exploration of Multi-Slot Based Spectrum Sensing. Sensors 2019, 19, 3497. https://doi.org/10.3390/s19163497
Zhu J, Cao H, Mu J. A Further Exploration of Multi-Slot Based Spectrum Sensing. Sensors. 2019; 19(16):3497. https://doi.org/10.3390/s19163497
Chicago/Turabian StyleZhu, Jia, Hongsong Cao, and Junsheng Mu. 2019. "A Further Exploration of Multi-Slot Based Spectrum Sensing" Sensors 19, no. 16: 3497. https://doi.org/10.3390/s19163497
APA StyleZhu, J., Cao, H., & Mu, J. (2019). A Further Exploration of Multi-Slot Based Spectrum Sensing. Sensors, 19(16), 3497. https://doi.org/10.3390/s19163497