Exploiting Vehicular Social Networks and Dynamic Clustering to Enhance Urban Mobility Management

 , ,
, ,  , and
, and
Abstract
:1. Introduction
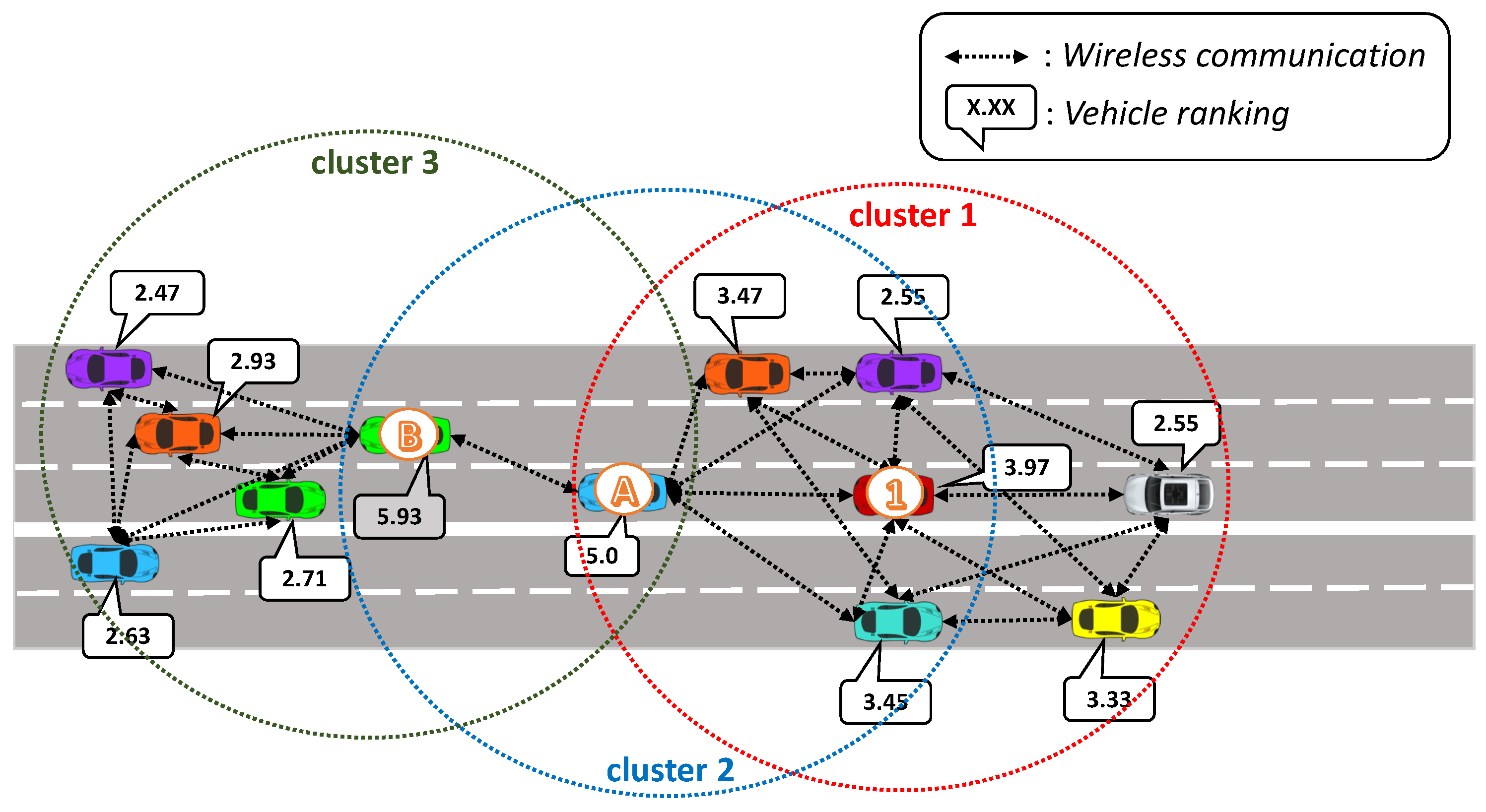
- A novel dynamic clustering approach based on SNA along with received signal strength (Section 3.2). This approach is applied to improve the data flow within the network;
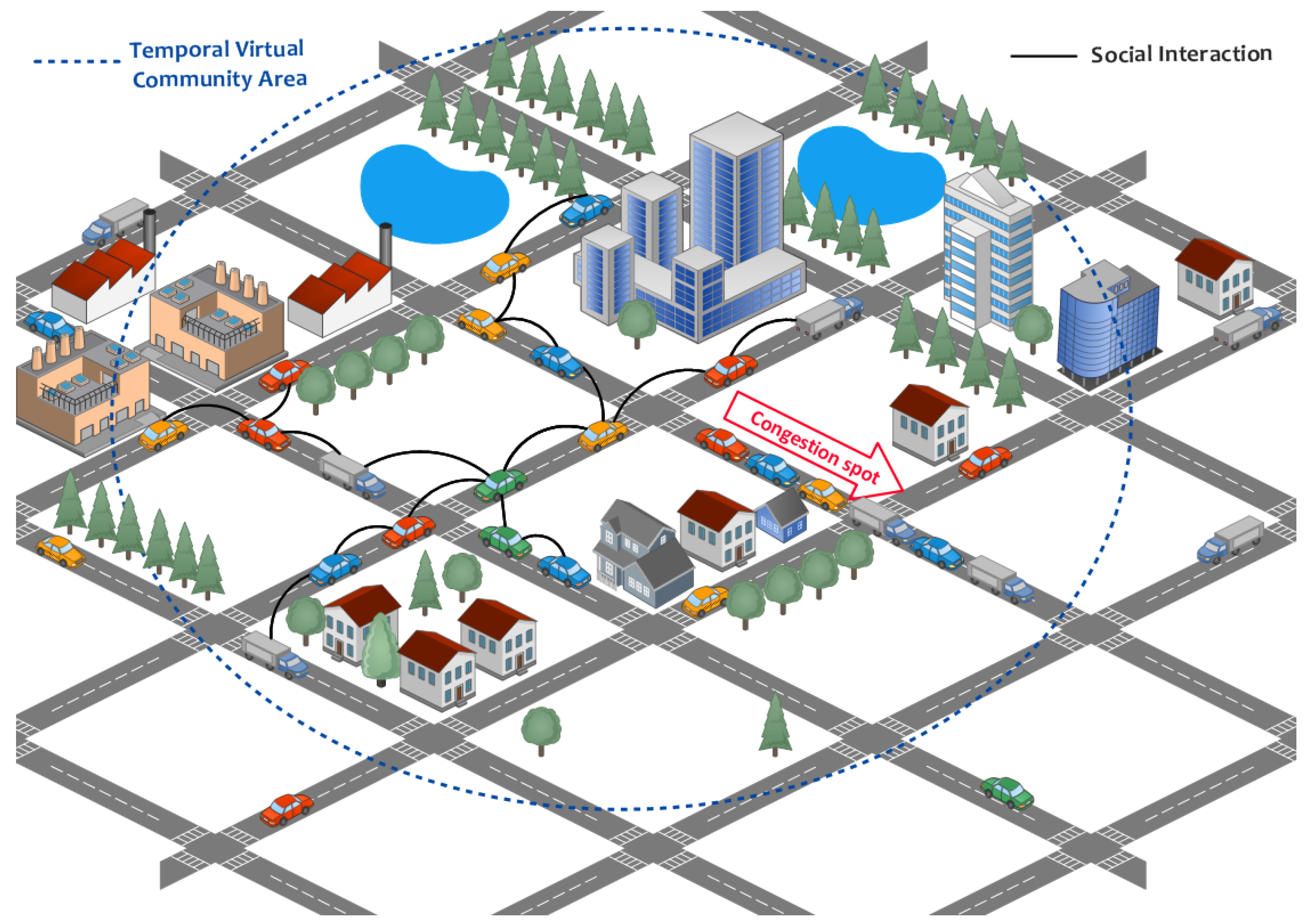
- A novel collaborative rerouting approach based on social interaction and virtual temporal community to enhance urban mobility management (Section 3.4).
2. Related Work
2.1. Dynamic Clustering Algorithms
2.2. Infrastructure-Based Urban Mobility Management
2.3. Infrastructure-Less Urban Mobility Management
3. Towards the Design of SOPHIA
3.1. Vehicular Crowdsensing
3.2. Dynamic Clustering Approach
- 1.
- Neighborhood discovery: a node generally announces its existence to its neighbors through a periodic short-message transmission, while simultaneously gathering the same message from its neighbors;
- 2.
- CH selection: after collecting data about the local environment, each node will compute, based on some rule, to find the most appropriate node to act as its CH. In this step, the node can also consider its suitability to be a CH;
- 3.
- Affiliation: the node will contact the neighbor node that was chosen as the appropriate CH and seek to become a CM of that cluster;
- 4.
- Announcement: the most appropriate CH may then send an announcement message to its neighbors to initiate the process of cluster formation;
- 5.
- Maintenance: this step is divided into two parts:
- (a)
- As a CH: if a CH loses all connections with its CMs, the cluster is assumed to be dead, and the procedure is started again (Step 1). On the other hand, a cluster can merge with another one and become a larger cluster. In this case, the node will execute the Step 5(b);
- (b)
- As a CM: the node periodically evaluates the link to its CH. If the link fails it will return to Step 1. If the node receives an affiliation request from a node that does not belong to its group, it can start the CH selection again (Step 2) to choose the next appropriate CH.
| Algorithm 1: Vehicle score calculation. |
| inputs: N = {n1, n2, ..., nn} the set of all vehicles that are currently within the transmission range |
| output: Vehicle score (vescn) |
 |
3.3. Knowledge Extraction and Distribution
3.4. Collaborative Route-Planning
| Algorithm 2: Collaborative route-planning for vehicles that are moving toward the congested road. |
| inputs: msg—warning message, which contains the coordinates of the traffic congestion point (sx, sy). (rx, ry) depicts the coordinates of the receiving vehicle |
| output: r - the alternative route chosen |
 |
4. Performance Evaluation and Results
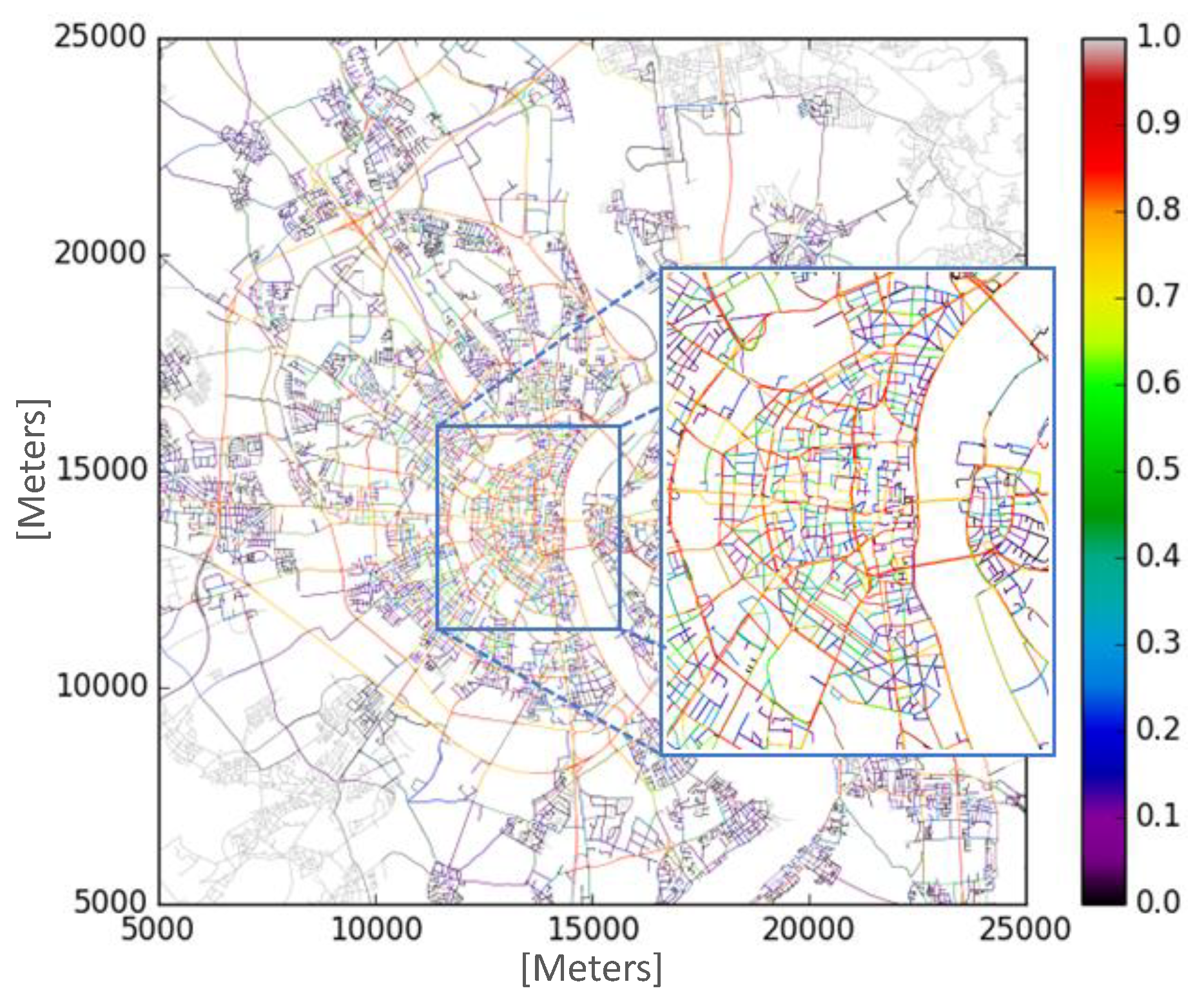
4.1. Simulation Setup
- Control channel assessment
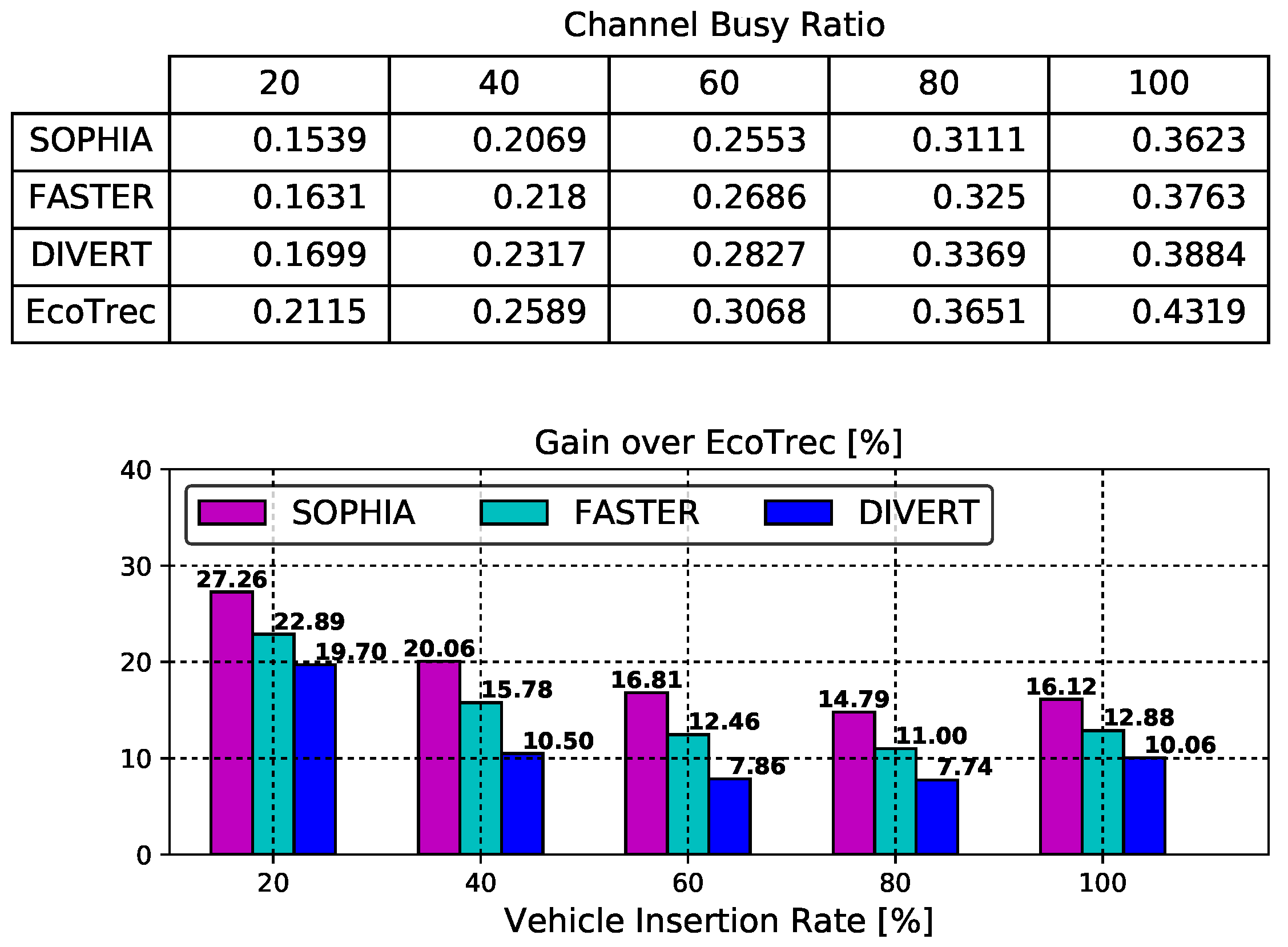
- Channel busy ratio: indicates the interference level. This is estimated as the fraction of the time in which the channel is identified as busy due to packet collisions or successful transmission;
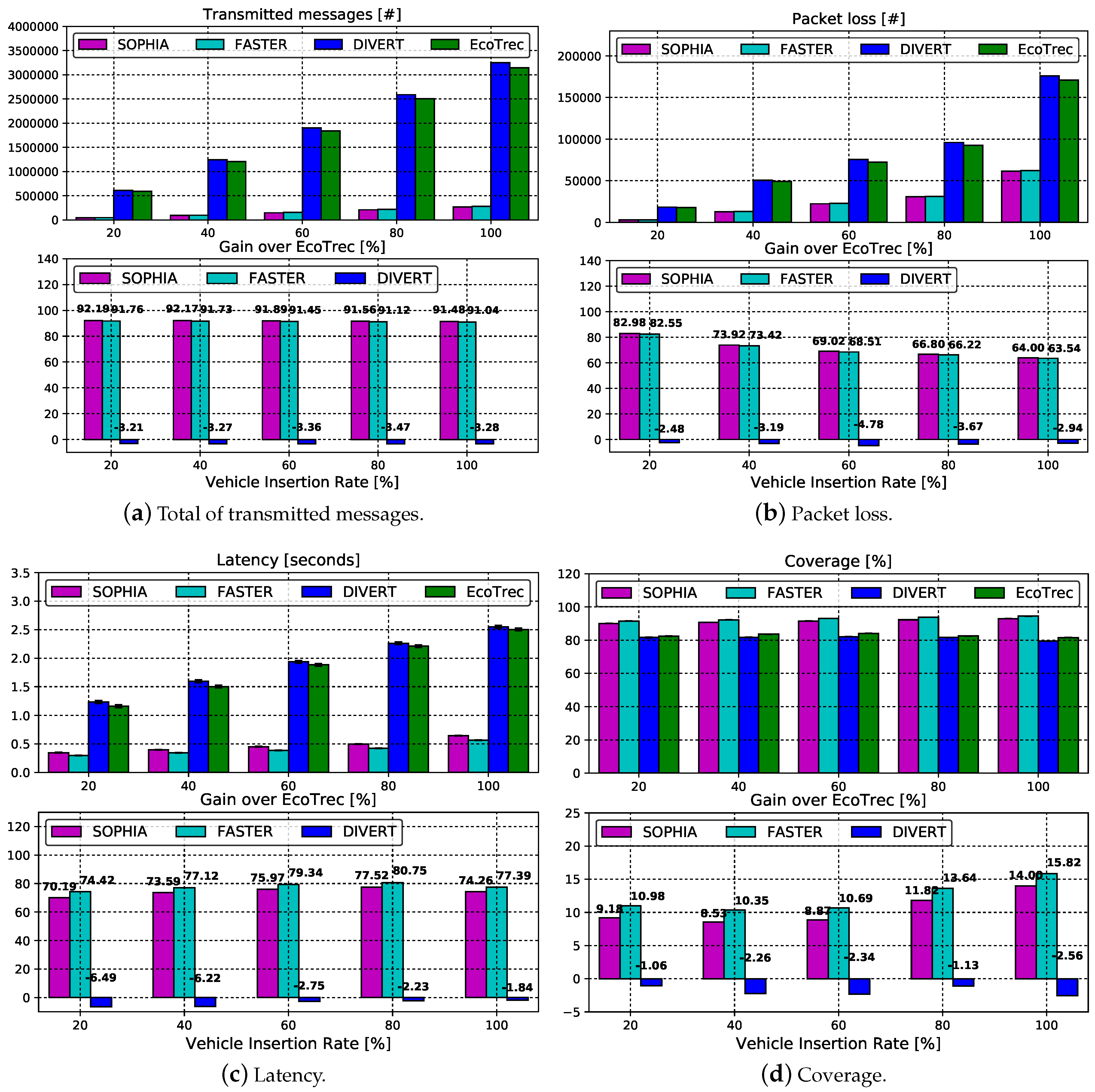
- Scalability assessment
- Overhead: measures the total amount of transmitted messages by the vehicles;
- Latency: demonstrates the time spent to deliver the messages to the vehicles;
- Packet loss: shows the total number of lost packets during the message transmissions;
- Coverage: indicates the percentage of messages successfully delivered.
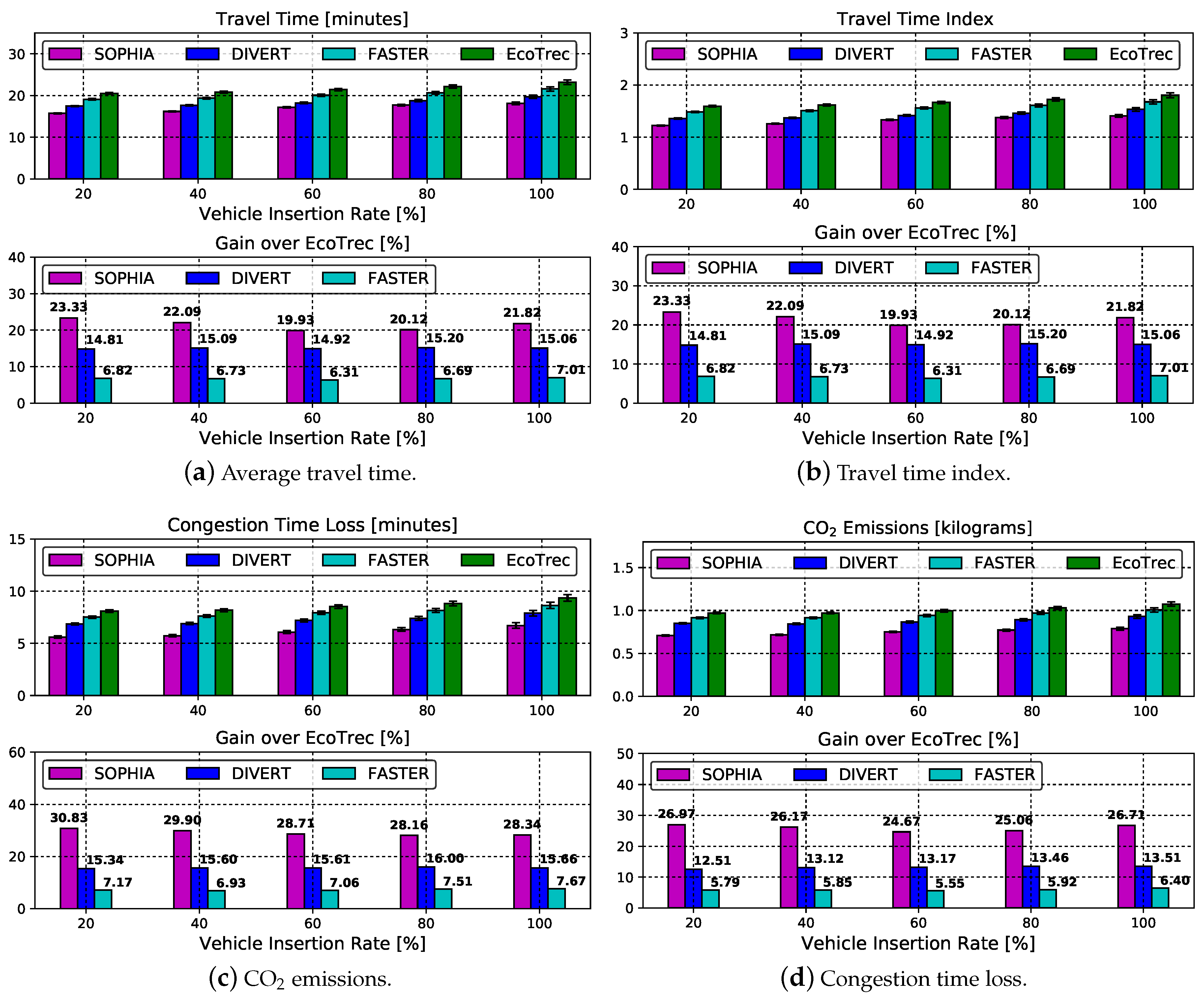
- Traffic management assessment
- Travel time: indicates the average travel time in relation to all vehicles;
- Travel Time Index: measures the level of urban traffic congestion [36]. This index is calculated by the ratio of the total travel time to the free-flow travel time;
- Congestion time loss: describes the average time spent on congestion;
- CO2 emission: gives the average CO2 emission of all vehicles.
4.2. Control Channel Assessment
4.3. Scalability Assessment
4.4. Traffic Management Assessment
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Rahim, A.; Qiu, T.; Ning, Z.; Wang, J.; Ullah, N.; Tolba, A.; Xia, F. Social acquaintance based routing in Vehicular Social Networks. Future Gener. Comput. Syst. 2017, 93, 751–760. [Google Scholar] [CrossRef]
- Falk, H. Applications, architectures, and protocol design issues for mobile social networks: A survey. Proc. IEEE 2011, 99, 2125–2129. [Google Scholar] [CrossRef]
- Ahmed, A.M.; Qiu, T.; Xia, F.; Jedari, B.; Abolfazli, S. Event-based mobile social networks: Services, technologies, and applications. IEEE Access 2014, 2, 500–513. [Google Scholar] [CrossRef]
- Vegni, A.M.; Loscri, V. A survey on vehicular social networks. IEEE Commun. Surv. Tutor. 2015, 17, 2397–2419. [Google Scholar] [CrossRef]
- Qin, J.; Zhu, H.; Zhu, Y.; Lu, L.; Xue, G.; Li, M. Post: Exploiting dynamic sociality for mobile advertising in vehicular networks. IEEE Trans. Parallel Distrib. Syst. 2016, 27, 1770–1782. [Google Scholar] [CrossRef]
- Rahim, A.; Kong, X.; Xia, F.; Ning, Z.; Ullah, N.; Wang, J.; Das, S.K. Vehicular social networks: A survey. Pervasive Mob. Comput. 2017, 43, 96–113. [Google Scholar] [CrossRef]
- Akabane, A.T.; Immich, R.; Madeira, E.R.; Villas, L.A. iMOB: An Intelligent Urban Mobility Management System Based on Vehicular Social Networks. In Proceedings of the 2018 IEEE Vehicular Networking Conference (VNC), Taipei, Taiwan, 5–7 December 2018; pp. 1–8. [Google Scholar]
- Mezghani, F.; Dhaou, R.; Nogueira, M.; Beylot, A.L. Content dissemination in vehicular social networks: Taxonomy and user satisfaction. IEEE Commun. Mag. 2014, 52, 34–40. [Google Scholar] [CrossRef]
- Akabane, A.T.; Gomes, R.L.; Pazzi, R.W.; Madeira, E.R.; Villas, L.A. APOLO: A Mobility Pattern Analysis Approach to Improve Urban Mobility. In Proceedings of the GLOBECOM 2017—2017 IEEE Global Communications Conference, Singapore, 4–8 December 2017; pp. 1–6. [Google Scholar]
- Wang, S.; Djahel, S.; Zhang, Z.; McManis, J. Next road rerouting: A multiagent system for mitigating unexpected urban traffic congestion. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2888–2899. [Google Scholar] [CrossRef]
- Doolan, R.; Muntean, G.M. EcoTrec—A novel VANET-based approach to reducing vehicle emissions. IEEE Trans. Intell. Transp. Syst. 2017, 18, 608–620. [Google Scholar] [CrossRef]
- Pan, J.S.; Popa, I.S.; Borcea, C. Divert: A distributed vehicular traffic re-routing system for congestion avoidance. IEEE Trans. Mob. Comput. 2017, 16, 58–72. [Google Scholar] [CrossRef]
- Sommer, C.; Joerer, S.; Segata, M.; Tonguz, O.K.; Cigno, R.L.; Dressler, F. How shadowing hurts vehicular communications and how dynamic beaconing can help. IEEE Trans. Mob. Comput. 2015, 14, 1411–1421. [Google Scholar] [CrossRef]
- de Souza, A.M.; Villas, L.A. A fully-distributed traffic management system to improve the overall traffic efficiency. In Proceedings of the 19th ACM International Conference on Modeling, Analysis and Simulation of Wireless and Mobile Systems, Valletta, Malta, 13–17 November 2016; pp. 19–26. [Google Scholar]
- Nayak, P.; Devulapalli, A. A fuzzy logic-based clustering algorithm for WSN to extend the network lifetime. IEEE Sens. J. 2015, 16, 137–144. [Google Scholar] [CrossRef]
- Cooper, C.; Franklin, D.; Ros, M.; Safaei, F.; Abolhasan, M. A comparative survey of VANET clustering techniques. IEEE Commun. Surv. Tutor. 2016, 19, 657–681. [Google Scholar] [CrossRef]
- Abuarqoub, A.; Hammoudeh, M.; Adebisi, B.; Jabbar, S.; Bounceur, A.; Al-Bashar, H. Dynamic clustering and management of mobile wireless sensor networks. Comput. Netw. 2017, 117, 62–75. [Google Scholar] [CrossRef] [Green Version]
- Khakpour, S.; Pazzi, R.W.; El-Khatib, K. Using clustering for target tracking in vehicular ad hoc networks. Veh. Commun. 2017, 9, 83–96. [Google Scholar] [CrossRef]
- Hafeez, K.A.; Zhao, L.; Liao, Z.; Ma, B.N.W. A fuzzy-logic-based cluster head selection algorithm in VANETs. In Proceedings of the 2012 IEEE International Conference on Communications (ICC), Ottawa, ON, Canada, 10–15 June 2012; pp. 203–207. [Google Scholar]
- Ren, M.; Khoukhi, L.; Labiod, H.; Zhang, J.; Veque, V. A mobility-based scheme for dynamic clustering in vehicular ad-hoc networks (VANETs). Veh. Commun. 2017, 9, 233–241. [Google Scholar] [CrossRef]
- Hassanabadi, B.; Shea, C.; Zhang, L.; Valaee, S. Clustering in vehicular ad hoc networks using affinity propagation. Ad Hoc Netw. 2014, 13, 535–548. [Google Scholar] [CrossRef]
- Abuashour, A.; Kadoch, M. Performance improvement of cluster-based routing protocol in VANET. IEEE Access 2017, 5, 15354–15371. [Google Scholar] [CrossRef]
- Kasprzok, A.; Ayalew, B.; Lau, C. Decentralized traffic rerouting using minimalist communications. In Proceedings of the 2017 IEEE 28th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Montreal, QC, Canada, 8–13 October 2017; pp. 1–7. [Google Scholar]
- Cascetta, E.; Russo, F.; Vitetta, A. Stochastic user equilibrium assignment with explicit path enumeration: Comparison of models and algorithms. IFAC Proc. Vol. 1997, 30, 1031–1037. [Google Scholar] [CrossRef]
- Garip, M.T.; Gursoy, M.E.; Reiher, P.; Gerla, M. Scalable reactive vehicle-to-vehicle congestion avoidance mechanism. In Proceedings of the 2015 12th Annual IEEE Consumer Communications and Networking Conference (CCNC), Las Vegas, NV, USA, 9–12 January 2015; pp. 943–948. [Google Scholar]
- Bazzi, A.; Zanella, A. Position based routing in crowd sensing vehicular networks. Ad Hoc Netw. 2016, 36, 409–424. [Google Scholar] [CrossRef]
- Wang, X.; Ning, Z.; Hu, X.; Ngai, E.C.H.; Wang, L.; Hu, B.; Kwok, R.Y. A City-Wide Real-Time Traffic Management System: Enabling Crowdsensing in Social Internet of Vehicles. IEEE Commun. Mag. 2018, 56, 19–25. [Google Scholar] [CrossRef]
- Ganti, R.K.; Ye, F.; Lei, H. Mobile crowdsensing: Current state and future challenges. IEEE Commun. Mag. 2011, 49, 32–39. [Google Scholar] [CrossRef]
- Baguena, M.; Calafate, C.T.; Cano, J.C.; Manzoni, P. An adaptive anycasting solution for crowd sensing in vehicular environments. IEEE Trans. Ind. Electron. 2015, 62, 7911–7919. [Google Scholar] [CrossRef]
- Akabane, A.T.; Pazzi, R.W.; Madeira, E.R.; Villas, L.A. Applying egocentric betweenness measure in vehicular ad hoc networks. In Proceedings of the 2017 IEEE 16th International Symposium on Network Computing and Applications (NCA), Cambridge, MA, USA, 30 October–1 November 2017; pp. 1–4. [Google Scholar]
- Akabane, A.; Immich, R.; Pazzi, R.; Madeira, E.; Villas, L. Distributed Egocentric Betweenness Measure as a Vehicle Selection Mechanism in VANETs: A Performance Evaluation Study. Sensors 2018, 18, 2731. [Google Scholar] [CrossRef] [PubMed]
- Nilsson, M.G.; Gustafson, C.; Abbas, T.; Tufvesson, F. A Measurement-Based Multilink Shadowing Model for V2V Network Simulations of Highway Scenarios. IEEE Trans. Veh. Technol. 2017, 66, 8632–8643. [Google Scholar] [CrossRef] [Green Version]
- Akabane, A.T.; Villas, L.A.; Madeira, E.R.M. An adaptive solution for data dissemination under diverse road traffic conditions in urban scenarios. In Proceedings of the Wireless Communications and Networking Conference (WCNC), New Orleans, LA, USA, 9–12 March 2015; pp. 1654–1659. [Google Scholar]
- Manual, H.C. HCM2010; Transportation Research Board, National Research Council: Washington, DC, USA, 2010. [Google Scholar]
- Atzori, L.; Floris, A.; Girau, R.; Nitti, M.; Pau, G. Towards the implementation of the Social Internet of Vehicles. Comput. Netw. 2018, 147, 132–145. [Google Scholar] [CrossRef]
- Schrank, D.; Eisele, B.; Lomax, T. TTI’s 2012 Urban Mobility Report: Powered by INRIX Traffic Data; Texas A&M Transportation Institute, Texas A&M University System: College Station, TX, USA, 2012. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Level of Service | Traffic Classification | |
|---|---|---|
| A | Free flow | (0.0∼0.33] |
| B | Reasonably free flow | (0.33∼0.4] |
| C | Stable flow | (0.4∼0.5] |
| D | Approaching unstable flow | (0.5∼0.7] |
| E | Unstable flow | (0.7∼0.9] |
| F | Forced or breakdown flow | (0.9∼1.0] |
| Parameter | Value |
|---|---|
| Vehicle Insertion Rate | 20% to 100% |
| MAC layer | IEEE 802.11p PHY |
| Bandwidth | 10 MHz |
| NIC Bitrate | 6 Mbps |
| NIC TX power | 20 mW |
| NIC Sensitivity | dBm |
| Transmission range | 287 m |
| Beacon transmission rate | 1 Hz |
| Confidence interval | 95% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Akabane, A.T.; Immich, R.; Pazzi, R.W.; Madeira, E.R.M.; Villas, L.A. Exploiting Vehicular Social Networks and Dynamic Clustering to Enhance Urban Mobility Management. Sensors 2019, 19, 3558. https://doi.org/10.3390/s19163558
Akabane AT, Immich R, Pazzi RW, Madeira ERM, Villas LA. Exploiting Vehicular Social Networks and Dynamic Clustering to Enhance Urban Mobility Management. Sensors. 2019; 19(16):3558. https://doi.org/10.3390/s19163558
Chicago/Turabian StyleAkabane, Ademar Takeo, Roger Immich, Richard Wenner Pazzi, Edmundo Roberto Mauro Madeira, and Leandro Aparecido Villas. 2019. "Exploiting Vehicular Social Networks and Dynamic Clustering to Enhance Urban Mobility Management" Sensors 19, no. 16: 3558. https://doi.org/10.3390/s19163558
APA StyleAkabane, A. T., Immich, R., Pazzi, R. W., Madeira, E. R. M., & Villas, L. A. (2019). Exploiting Vehicular Social Networks and Dynamic Clustering to Enhance Urban Mobility Management. Sensors, 19(16), 3558. https://doi.org/10.3390/s19163558